ргр. Расчетнографическая работа По дисциплине Идентификация и моделирование объектов автоматизации моделирование динамики систем автоматического регулирования
 Скачать 243.3 Kb. Скачать 243.3 Kb.
|

|
Министерство образования и науки Украины Одесский Университет «Национальная Морская Академия» Кафедра ТАУ и ВТ Расчетно-графическая работа По дисциплине: «Идентификация и моделирование объектов автоматизации» МОДЕЛИРОВАНИЕ ДИНАМИКИ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ Выполнил курсант Вариант 22 Одесса 2016 Задание Передаточная функция объекта регулирования:  Регулятор выбираем двухимпульсный пропорциональный с передаточной функцией:  Измерительное устройство при использовании двухимпульсного регулятора принимается безинерционным с коэффициентом передачи, равным 1. Измерительное устройство 2 будет иметь следующую передаточную функцию.  Усилительное устройство является безинерционным с коэффициентом передачи Ку.у Исполнительное устройство имеет ограничение выходного сигнала на уровне 1,25 отн. ед. оно полагается аналоговым с передаточной функцией  В канале передачи управляющего воздействия учитывается люфт  В качестве возмущающего воздействия используем единичное изменение возмущения по линейному закону. Модельное исследование выполняется при следующих базовых значениях переменных: Tоб=3с. Кр=2 Тис.у=0,1 Тн0,4 с. Кн=0,15 Ку.у=0,02 Ти.у2=0,02 2. Структурная схема САР 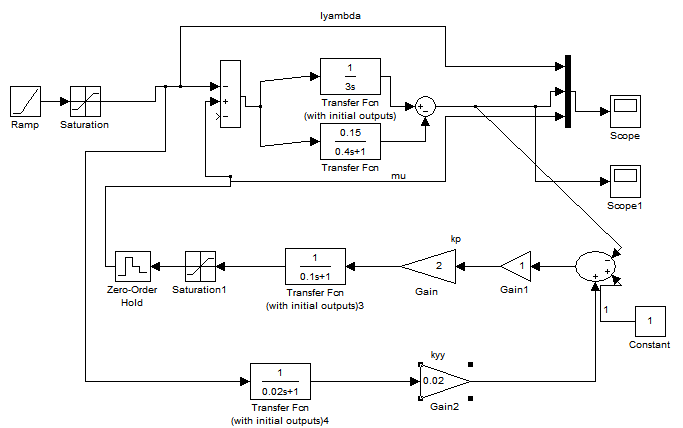 Рис. 1. Структурная схема САР где: -выходная функция ; -возмущающее воздействие; -регулирующее воздействие; 4. Статический расчет. В статическом режиме сигнал на выходе из ОР должен равняться – 1 ,а на входе интегрирующей части ОР, соответственно, сигнал должен равняться нулю. Исходя из этого на входах и выхода остальных устройств системы начальные условия будут нулевые, а сигнал уставки регулятора равен – 1. 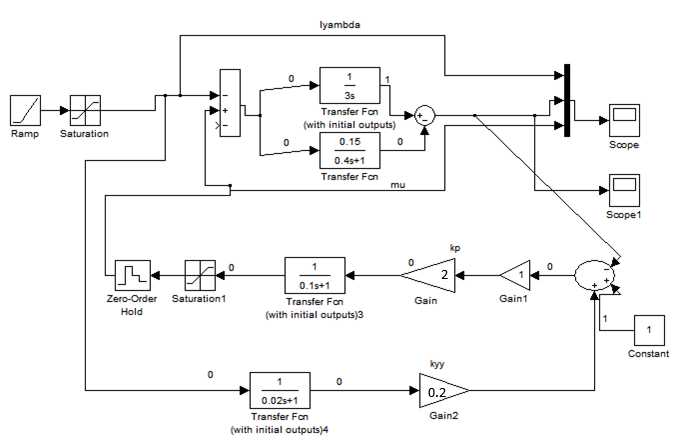 Рис. 2. Структурная схема САР с учётом начальных условий. 4. Моделирование переходных процессов в САР. Оптимизация 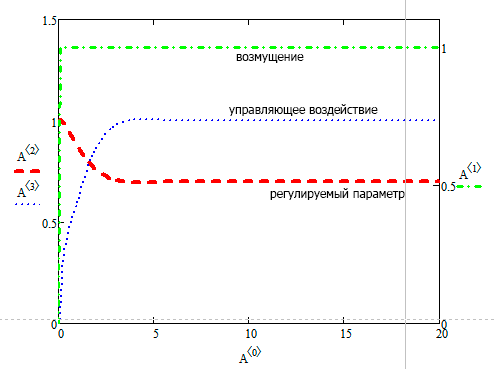 Рис. 3. Переходные процессы при начальных значениях параметров настройки регулятора. Выбор значений параметров настройки зависит от критерия оптимизации – минимальный динамический заброс, и условия что колебательность не должна превышать 5% Таблица 1. Варьирование  при постоянном при постоянном 
Данным варьированием Kp мы добились результата, при котором динамический заброс будет равен 0% Таблица 2. Варьирование и
При дальнейшем варьировании Kр наш регулируемый параметр будет иметь колебания и динамический заброс, поэтому в качестве оптимальных настроек выбраны   По полученным данным построим графики зависимости статического отклонения от Kp: 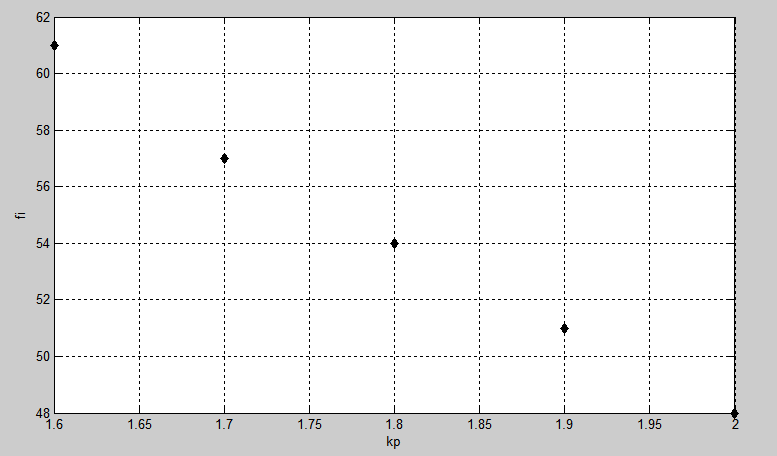 Рис. 4. График зависимости от Kp По полученным данным построим графики зависимости статического отклонения от Kyy: 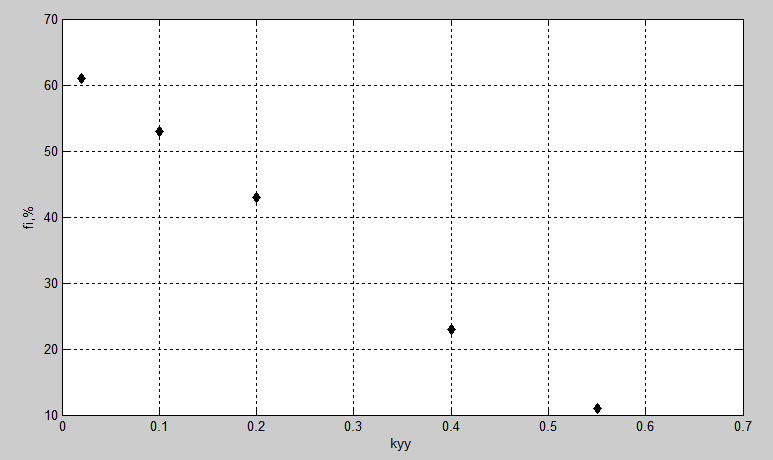 Рис. 4. График зависимости от Kyy 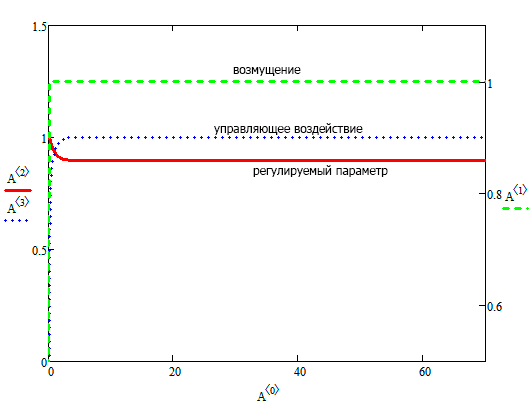 Рис. 6. Переходные процессы при оптимальных значениях параметров настройки регулятора. 1)Сформируем центрированный случайный сигнал спектральная плотность которого описывается выражением  путем подачи белого шума на соответствующий фильтр. (А=2, В=2) путем подачи белого шума на соответствующий фильтр. (А=2, В=2)Записав сигнал, подаваемый на вход САР, с помощью приемника Scope в память, обработали его и проверили совпадение теоретически заданной кривой спектральной плотности и экспериментально регистрируемой. > 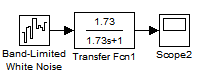 > W=tf(sqrt(3),[sqrt(3) 1]); > W=tf(sqrt(3),[sqrt(3) 1]); >> B=bandwidth(W) B = 0.5760 >> T=2*pi/B T = 10.9087 >> t=T/100 t = 0.1091 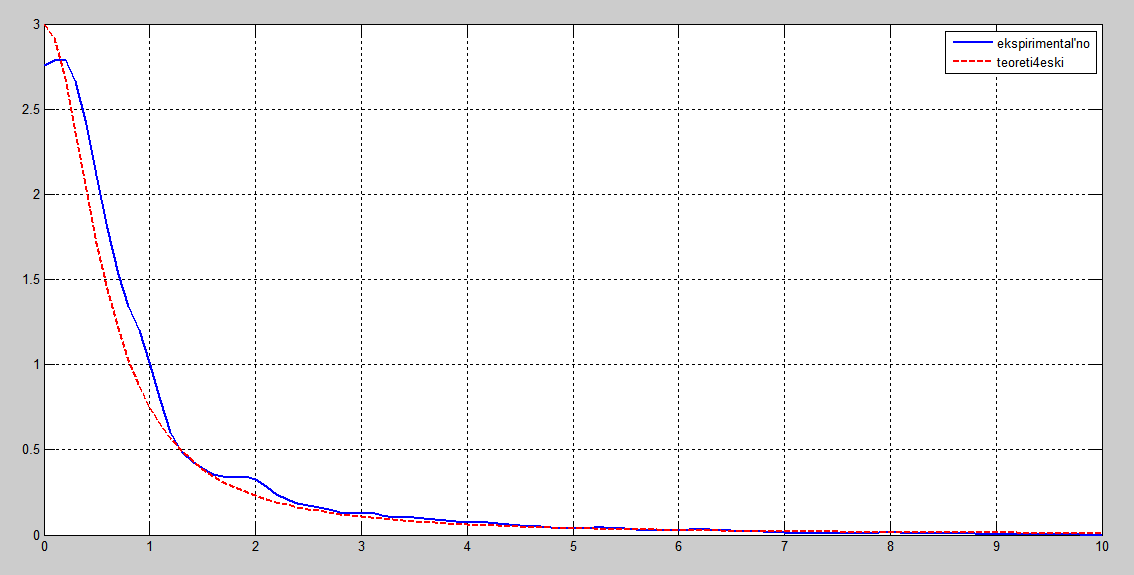 Рис.7 Проверка совпадений теоретически заданной кривой и экспериментально регистрируемой 2)Оптимизируем настройки регулятора с целью получения минимальной величины дисперсии выходного сигнала через М-файл. 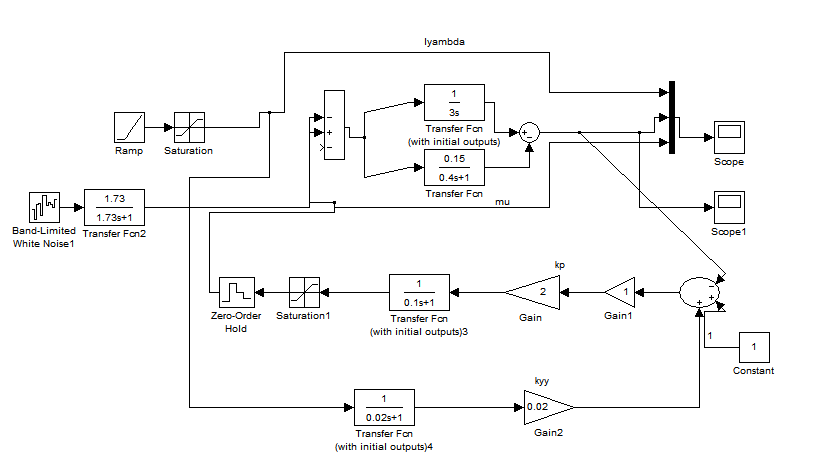 Таблица 1. Варьирование при постоянном
Таблица 2. Варьирование и
Заметим, что изменение Kyy практически не влияет на изменение динамического заброса, поэтому построим график зависимости от Kpp. 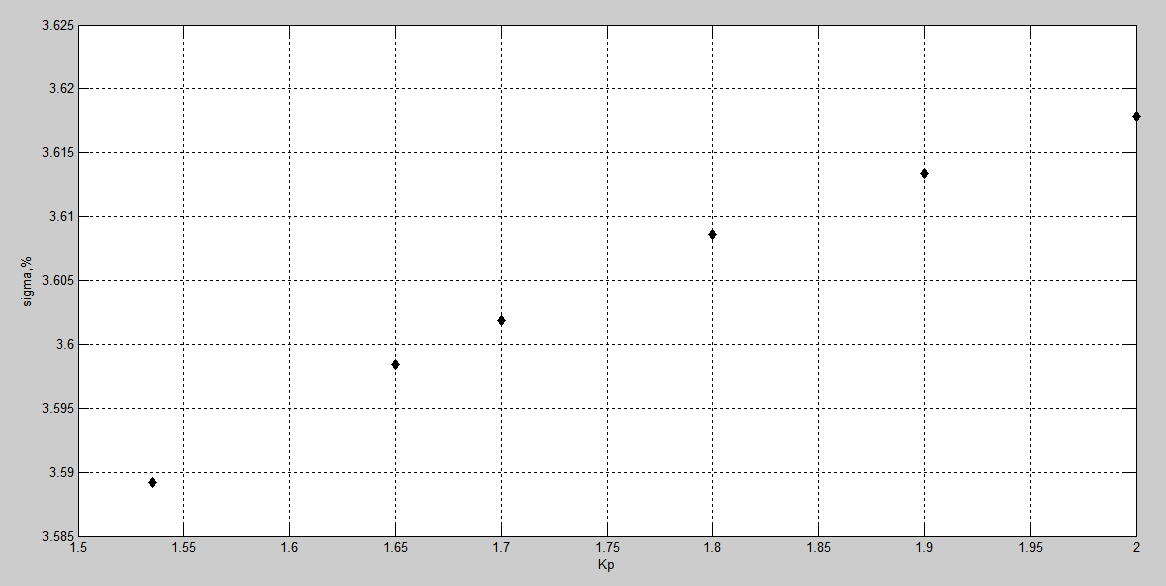 Рис. 8 График зависимости от Kpp Попробуем еще раз изменить параметры на Kp=1.2, kyy=0.7 и получим, что 3.5506. Данные параметры лучше параметров полученных варьированьем, но сильно велики по отношению к параметрам по заданию. ВыводыВ данной работе были изучены технологии моделирования на цифровой ЭВМ динамики САР. Были разработаны математические модели, алгоритма и программа расчета для ЭВМ. Формирование математической модели производится на базе общей функциональной схемы с заданными параметрами для её элементов. Построение структурной схемы основывается на составлении дифференциальных уравнений и сопровождается статическим расчётом. В расчетно-графической работе была проведена оптимизация параметров настройки регулятора по заданному критерию – минимальный динамический заброс и колебательность не должна превышать 0.05 отн.ед. Так же был сформирован центрированный случайный сигнал, благодаря которому был построен экспериментальный график и был сравнен с теоретическим графиком. Были оптимизированы настройки регулятора, благодаря которым была получена минимальная величина дисперсии. Варьирование регулируемых параметров и их результаты были отображены графически. |