Курсовая. Курсовая ... Разработка блока управления шаговым двигателем
 Скачать 256.73 Kb. Скачать 256.73 Kb.
|

|
Министерство просвещения ПМР ГОУ СПО «» КУРСОВАЯ РАБОТА по дисциплине: Проектирование цифровых устройств на тему: Разработка блока управления шаговым двигателем Выполнил обучающийся Специальность 02.09.01 Компьютерные системы и комплексы Руководитель ______________________ (оценка) __________________________ (дата, подпись руководителя) , 2021 Оглавление Введение 3 Заключение 9 Список использованных источник 10 ВведениеВ настоящее время электропривод представляет собой конструктивное единство электромеханического преобразователя энергии (двигателя), силового преобразователя и устройства управления. Двигатель обеспечивает преобразование электрической энергии в механическую. Разработка высокопроизводительных, компактных, экономичных систем привода является приоритетным направлением развития современной техники. Рост степени интеграции в микропроцессорной технике и переход от микропроцессоров к микроконтроллерам с встроенным набором специализированных периферийных устройств, сделали необратимой тенденцию массовой замены аналоговых систем управления приводами на системы прямого цифрового управления. Существуют микроконтроллеры различных типов программирования: однократно программируемые и перепрограммируемые. Применение перепрограммируемых микроконтроллеров неизбежно влечет за собой изменение в системе управления. Малые размеры корпусов различного исполнения делают микроконтроллеры пригодными для портативных устройств. Низкая цена, экономичность, быстродействие, простота использования, наличие достаточного количества портов ввода/вывода способствуют применению микроконтроллеров в различных областях. Целью данной курсовой работы является изучения материалов потребности данного прибора, выявление актуальности данного прибора для внедрения в использовании в быту, на предприятиях. В моей курсовой работе используется шаговый биполярный двигатель. В соответствие с поставленной целью необходимо решить следующие задачи: - изучить учебную справочную литературу и нормативные документы по теме исследования; - собрать, систематизировать и обработать цифровой и теоретический материал; - сделать выводы, разработать приложение по упрощению организации соревновании. При написании курсовой работы использовались такие методы как, аналитический метод, метод сравнения, метод анализ и синтеза. В процессе выполнения курсовой работы были использованы: учебная, справочная литература; первичные документы, регистры аналитического и синтетического учёта запасов. Теоретические аспекты разработки устройства Шаговый двигатель Двигатели постоянного тока (ДПТ) с постоянными магнитами начинают работать сразу, как только к якорной обмотке будет приложено постоянное напряжение. Переключение направления тока через обмотки ротора осуществляется механическим коммутатором — коллектором. Постоянные магниты при этом расположены на статоре. Шаговый двигатель (ШД) может быть рассмотрен как ДПТ без коллекторного узла. Обмотки ШД являются частью статора. На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами. Обычно система мотор — контроллер разрабатывается так, чтобы была возможность вывода ротора в любую, фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии. Принято различать шаговые двигатели и серводвигатели. Принцип их действия во многом похож, и многие контроллеры могут работать с обоими типами. Основное отличие заключается в шаговом (дискретном) режиме работы шагового двигателя (n шагов на один оборот ротора) и плавности вращения синхронного двигателя. Шаговые двигатели преимущественно используются в системах без обратных связей, требующих небольших ускорений при движении. Шаговые двигатели (ШД) делятся на две разновидности: двигатели с постоянными магнитами и двигатели с переменным магнитным сопротивлением (гибридные двигатели). С точки зрения контроллера отличие между ними отсутствует. Двигатели с постоянными магнитами обычно имеют две независимые обмотки, у которых может присутствовать или отсутствовать срединный отвод (см. рисунок 1). 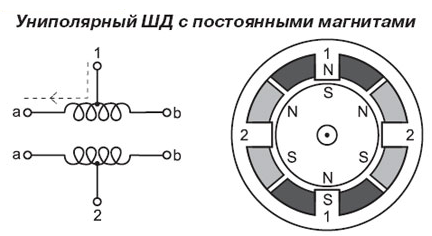 Рисунок 1 – Униполярный шаговый двигатель. Биполярные шаговые двигатели с постоянными магнитами и гибридные двигатели сконструированы более просто, чем униполярные двигатели, обмотки в них не имеют центрального отвода (см. рисунок 2). 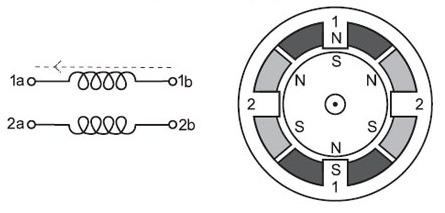 Рисунок 2 – Биполярный или гибридный шаговый двигатель. За это упрощение приходится платить более сложным реверсированием полярности каждой пары полюсов мотора. Шаговые двигатели имеют широкий диапазон угловых разрешений. Более грубые моторы обычно вращаются на 90° за шаг, в то время как прецизионные двигатели могут иметь разрешение 1,8° или 0,72° на шаг. Если контроллер позволяет, то возможно использование полушагового режима или режима с более мелким дроблением шага (микрошаговый режим), при этом на обмотки подаются дробные значения напряжений, зачастую формируемые при помощи ШИМ-модуляции. Если в процессе управления используется возбуждение только одной обмотки в любой момент времени, то ротор будет поворачиваться на фиксированный угол, который будет удерживаться пока внешний момент не превысит момента удержания двигателя в точке равновесия. Для правильного управления биполярным шаговым двигателем необходима электрическая схема, которая должна выполнять функции старта, стопа, реверса и изменения скорости. Шаговый двигатель транслирует последовательность цифровых переключений в движение. «Вращающееся» магнитное поле обеспечивается соответствующими переключениями напряжений на обмотках. Вслед за этим полем будет вращаться ротор, соединенный посредством редуктора с выходным валом двигателя. Каждая серия содержит высокопроизводительные компоненты, отвечающие все возрастающим требованиям к характеристикам современных электронных применений. Схема управления для биполярного шагового двигателя требует наличия мостовой схемы для каждой обмотки. Эта схема позволит независимо менять полярность напряжения на каждой обмотке. На рисунке 3 показана последовательность управления для полношагового режима.  Рисунок 3 – Последовательность управления ШД в полношаговом режиме. На рисунке 4 показана последовательность для полу шагового управления.  Рисунок 4 – Последовательность управления ШД в полушаговом режиме. Максимальная скорость движения определяется исходя из физических возможностей шагового двигателя. При этом скорость регулируется путем изменения размера шага. Более крупные шаги соответствуют большей скорости движения. В системах управления электроприводами для отработки заданного угла или перемещения используют датчики обратной связи по углу или положению выходного вала исполнительного двигателя. Если в качестве исполнительного двигателя использовать синхронный шаговый двигатель, то можно обойтись без датчика обратной связи и упростить систему управления двигателем, так как отпадает необходимость использования в ней цифро-аналоговых (ЦАП) и аналого-цифровых (АЦП) преобразователей. Мощность шаговых двигателей лежит в диапазоне от единиц ватт до одного киловатта. Шаговый двигатель имеет не менее двух положений устойчивого равновесия ротора в пределах одного оборота. Напряжение питания обмоток управления шагового двигателя представляет собой последовательность однополярных или двуполярных прямоугольных импульсов, поступающих от электронного коммутатора. Результирующий угол соответствует числу переключений коммутатора, а частота вращения двигателя соответствует частоте переключений электронного коммутатора. Описание выбора элементной базы (деталей) ЗаключениеВ ходе выполнения курсовой работы на тему “Разработка информационного программного комплекса реестра участников соревнований” была изучена предметная область. Был произведён анализ существующих аналогов, выявлены недостатки существующих аналогов и принято решение создать собственный программный продукт. При исследовании предметно области были выявлены требования к программе, а также составлены руководство пользователю и программисту. Программный продукт удовлетворяет следующим требованиям: 1. создавать соревнование/участников 2. редактировать соревнование/участников 3. удалить соревнование/участников 4. сохранение данных в файл 5. загрузка данных из файла Поставленные задачи были успешно выполнены, обозначенные цели достигнуты. Список использованных источник1. А. Хейлсберг. Язык программирования C# и платформа .NET 4.5 Эндрю Троелсен. - М.: Вильямс, 2015. - 486 с. 2. Г. Шилдт. Полное руководство С#, 2015. - 1055 с. 3. Карл Вигерс и Джой Битти «Разработка требований к программному обеспечению» Москва, 2004. -25 c. 4. Бишоп, Дж. С# в кратком изложении/Дж. Бишоп, Н. Хорспул, - М.: Бином. Лаборатория знаний, 2015. - 472 с. 5. https://www.prostoysoft.ru/SportSchool.htm 6. https://pisoft.ru/finish/ |