Эссе. Габидуллин И.Р. Реферат Разработка цифрового двойника установки. Разработка цифрового двойника установки по очистке скважин от парафиновых отложений
 Скачать 1.25 Mb. Скачать 1.25 Mb.
|

Выводы по моделированию системы в программном обеспечении MATLABМатематическая модель 3-фазного асинхронного электрического двигателя на основе векторного управления показала себя исправно. Скорость заданная двумя вариантами (уставкой, либо сигналом) регулируется моделью без нареканий. Полученные графики скорости и электромагнитного момента соответствуют ожиданиям. Чтобы проверить перспективность данной работы в целом, нужно изначально проверить идеальную модель. Данная модель является идеализированным электродвигателем, что позволяет отбросить влияние внешней среды на сам процесс. Моделирование процесса перекачкиСледующая модель является «идеальным» контуром процесса перекачки продукта. В данную систему включены 2 емкости, одна из которых является запасом продукта в недрах, другая является емкости куда происходит процесс налива. Также присутствует насос, скорость на который задается из предыдущей модели, шаровые клапаны, управления на которые приходят с OPC сервера, расходомеры и трубы. Основная модель представлена на рисунке 25. 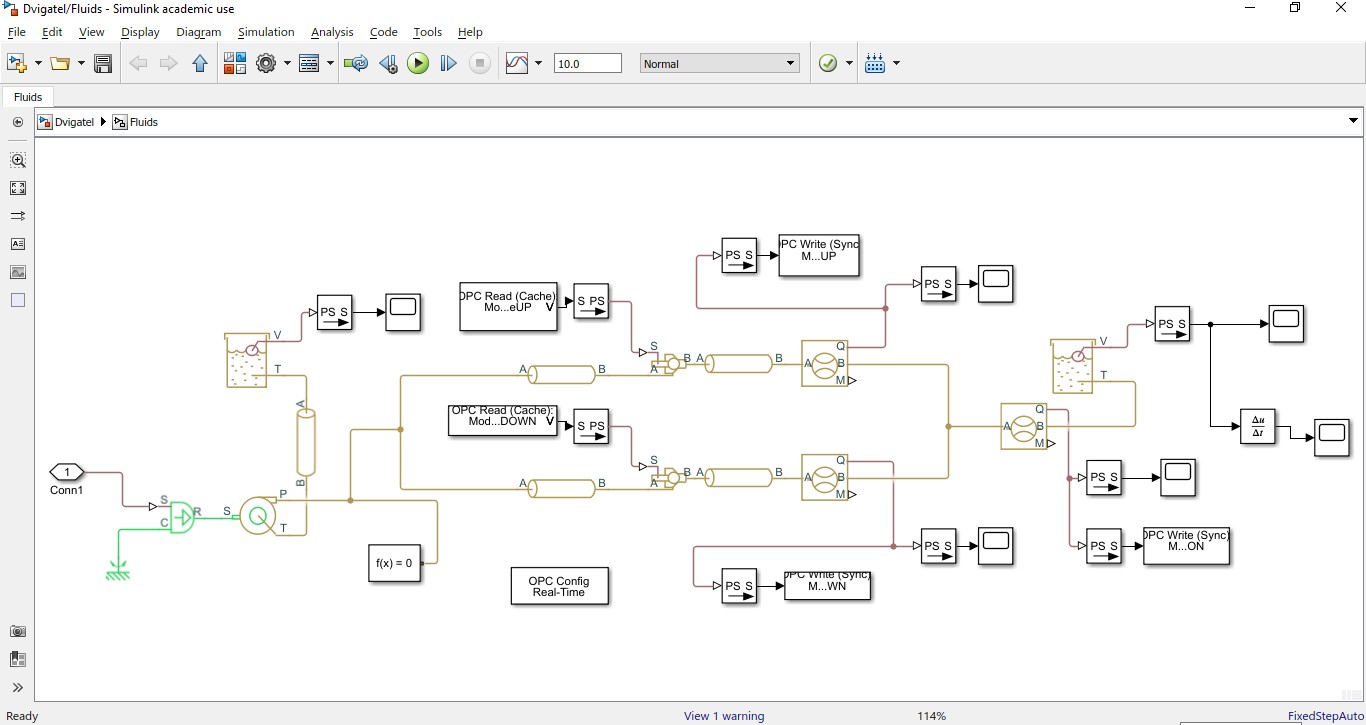 Рисунок 25 – Система перекачки продукта Для перекачки используем модель насоса, представленную блоком «Centrifugal Pump». Настройка данного блока приведена далее. Для любого насосного агрегата, подлежащего диагностированию и моделированию, необходимы следующие данные Поправочный коэффициент; Эталонная угловая скорость; Эталонная плотность; Сопротивление утечки; Крутящий момент приводного вала; Коэффициент крутящего давления; Аппроксимирующие коэффициенты. Характеристики насоса, аппроксимированные четырьмя коэффициентами c0, c1, c2 и c3, определяются для конкретной жидкости и определенной угловой скорости ведущего вала насоса. Эти два параметра и значения коэффициентов приведены в справочном материале насосов. Чтобы применить характеристики для другой скорости ω или плотности ρ, используются законы сродства. С этими законами подача в эталонном режиме, которая соответствует заданной подаче насоса и угловой скорости, вычисляется по формуле 13: 𝑞𝑟𝑒𝑓 = 𝑞 ∗ 𝑤𝑟𝑒𝑓 𝑤 (13) где q и ω - мгновенные значения производительности насоса и угловой скорости. Затем перепад давления prefв эталонном режиме вычисляется по уравнению 14 и преобразуется в перепад давления p при текущих угловой скорости и плотности (уравнение 15). 𝑝 = 𝜌 ∗ (𝑘 ∗ (𝑐 − 𝑐 ∗ 𝑞 ) − 𝑐 ∗ 𝑞2 − 𝑐 ∗ (𝑞 2 − 𝑞 (14) 𝑟𝑒𝑓 𝑟𝑒𝑓 0 1 𝑟𝑒𝑓 2 𝑟𝑒𝑓 3 𝐷 𝑟𝑒𝑓) ) где 𝜌𝑟𝑒𝑓 – плотность жидкости; с0, с1, с2, с3 – аппроксимирующие коэффициенты; 𝑞𝑟𝑒𝑓 – объемное нагнетание насоса при эталоном режиме; 𝑞𝐷 – номинальное нагнетание насоса. 𝑝 = 𝜌𝑟𝑒𝑓 ∗ ( 𝑤 2  ) )𝑤𝑟𝑒𝑓 ∗ 𝜌  𝜌𝑟𝑒𝑓 𝜌𝑟𝑒𝑓(15) Для моделирования емкостей используем блок «Tank», все характеристики данного блока представлены на рисунке 26. Объемный расход через вывод есть функция перепада давления с этого вывода во внутреннюю часть резервуара. Скорость потока положительна, если перепад давления положительный, то есть если давление в канале выше, чем в резервуаре, и отрицательна в противном случае (формула 16): 𝑞𝑖 = 𝐴𝑖 ∗ √ 2𝐾𝑖∗𝑝 ∗ ∆𝑝𝑖  (∆𝑝2+ 𝑝2 )1/4 (∆𝑝2+ 𝑝2 )1/4(16) 𝑖 𝐶𝑟,𝑖 где Ai- внутренняя площадь поперечного сечения порта; Ki- коэффициент потери давления, указанный для порта; Δpi- падение давления от порта к внутренней части резервуара; pCr,i- критическое давление, при котором поток через порт переключается между ламинарным и турбулентным. 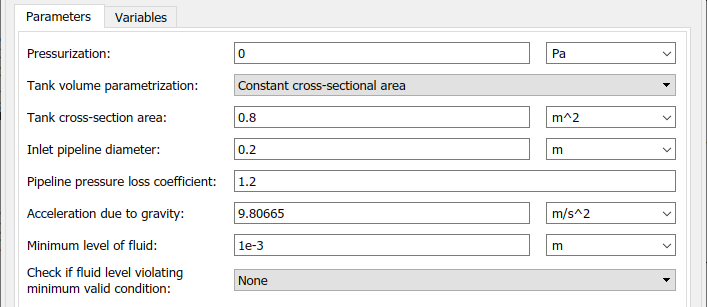 Рисунок 26 – Характеристики блока Tank Возьмем диаметр труб данной модели 20 сантиметров, что указано в поле Inlet pipeline diameter. Также укажем коэффициент свободного падения Acceleration due to gravity – 9.80665. Все трубы представлены блоком Hydraulic Pipeline, все характеристики, представленные на рисунке 27, являются характерными и для остальным труб. 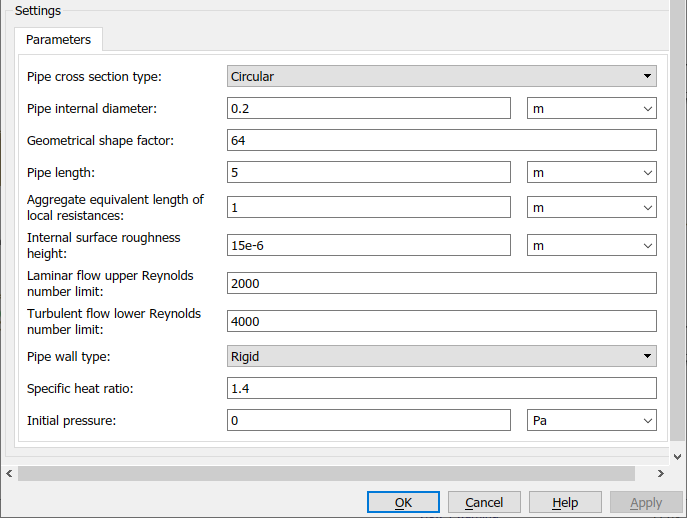 Рисунок 27 – Параметры блока Hydraulic Pipeline Для управления системой воспользуемся шаровыми клапанами – Ball Valve. Здесь также укажем диаметр труб, а диаметр самого шара поставим – 0.21 метра (рисунок 28). Клапан полностью закрыт при нулевом или отрицательном отклонении шара. Он полностью открыт, когда отклонение шара достигает или превышает (в зависимости от геометрии) значение, достаточное для полной очистки отверстия. Полностью закрытый клапан имеет площадь открытия, равную указанному параметру площади утечки, в то время как полностью открытый клапан имеет максимально возможную площадь открытия. Регулировка для внутренней утечки: 0 𝐴𝑀𝑎𝑥 = 𝜋 ∗ 𝑟2 + 𝐴𝐿𝑒𝑎𝑘 (17) где Amax – максимальная площадь открытия; r0 – радиус отверстия; ALeak – внутренняя область между входом и выходом клапана. 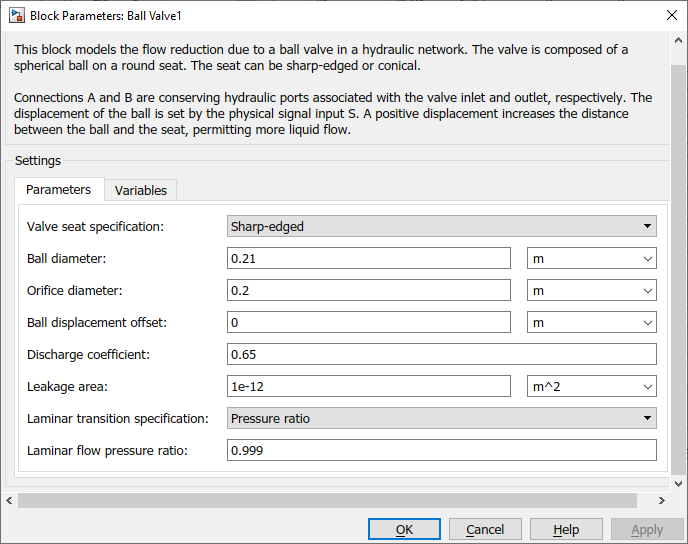 Рисунок 28 – Параметры шарового клапана Расход будем считать с помощью блока Hydraulic Flow Rate Sensor. В данном блоке предусмотрен счетчик массового расхода и счетчик объемного расхода. После того как обе модели готовы и протестированы следует соединить их в единую систему (рисунок 29).  Рисунок 29 – Итоговая система перекачки продукта |