Эссе. Габидуллин И.Р. Реферат Разработка цифрового двойника установки. Разработка цифрового двойника установки по очистке скважин от парафиновых отложений
 Скачать 1.25 Mb. Скачать 1.25 Mb.
|

Моделирование системы в программном обеспечении MATLABВ данной выпускной квалификационной работе используется модель 3- фазного асинхронного электродвигателя с векторным управлением. Для моделирования используется пакет SimPowerSystems включенный в программное обеспечение MATLAB. Для имитации перекачки нефти построим модель, в которую внесем насос, клапаны, трубы и две емкости. Одна из них – сосуд, куда нефть будет стекаться, вторая – имитация залежи нефти. Регулятор настроен на модульный оптимум. Моделирование асинхронного погружного электродвигателяЗа основу принята математическая модель из ресурса [10]. Все элементы используемые в моделировании описаны ниже, также приведены описание блоков и расчеты электродвигателя. Общая схема электродвигателя показана на рисунке 2. 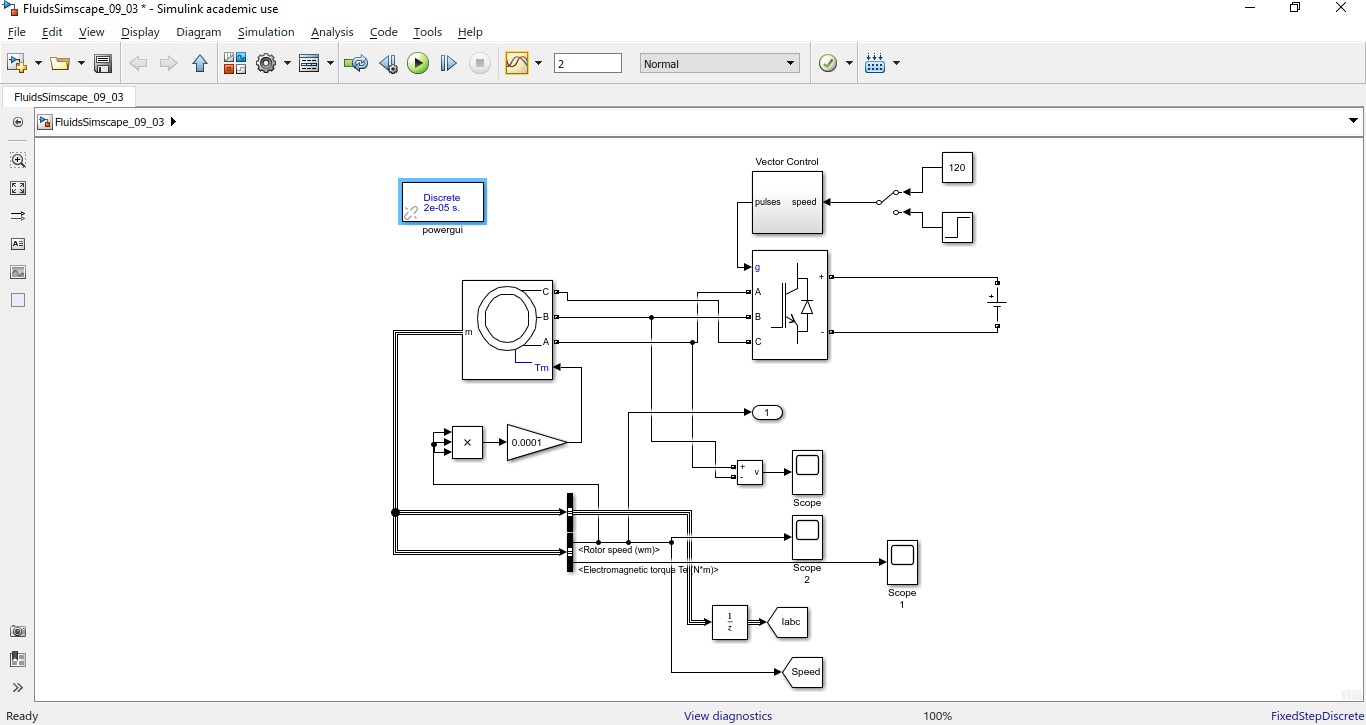 Рисунок 2 – Трехфазный асинхронный электродвигатель с векторным управлением В данной работе используется асинхронный двигатель 3-фазового питания (Induction Motor). В MATLAB данный двигатель представлен блоком Asynchronous Machine SI Units, находящимся в библиотеке SimPowerSystems (рисунок 3) [11], [13], [14], [14]. Для подачи напряжения на двигатель будем использовать инвертор напряжения (IGBT Invertor), который берется из библиотеки Power Electronics под названием Universal Bridge. Для задания постоянного питания на инвертор напряжения будем использовать блок DC Voltage Source, взятый из раздела Electrical Sources. Зададим постоянное напряжение величиной 530 В. Параметры асинхронного двигателя приведены на рисунке 4. Параметры инвертора напряжения даны на рисунке 5. Изначально скорость на двигатель задавалась с помощью блока Constant (рисунок 6). В дальнейшем скорость будет задаваться с помощью OPC сервер, но так как нам нужно изменять скорость используя PID- регулятор, то в финальной модели скорость на двигатель будет задаваться расчетом разницы, заданной уставкой расхода и реального значения расхода перед емкостью, а нагрузку на вал двигателя зададим с помощью блока GAIN используя коэффициент 0,0001. В модели также используется дискретная задержка, представленная блоком Unit Delay, взятого из раздела Discrete. Для моделирования системы необходим блок Powergui, который можно найти в разделе Fundamental Blocks библиотеки SimPowerSystems (Simscape). Параметры этих блоков и их местонахождение представлены на рисунке7. Для передачи сигнала в блоки From используем блоки Goto и Goto1 (рисунок 8). Для этого занесем в данные блоки наименования сигналов скорости и значения токов (Speed и Iabc). Для управления двигателем мы приняли решение применить векторное управление. В данном блоке мы внесли регулятор тока и скорости, привели расчеты токов и потока, также включили блоки преобразования координат и блок расчета угла положения (рисунок 9). Все сборки проводили в блоках Subsystem из раздела Ports & Subsystems библиотеки Simulink. 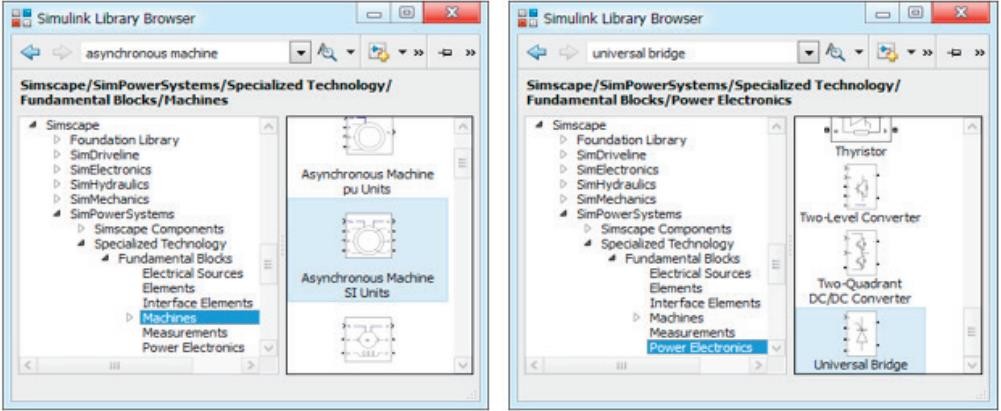 Рисунок 3 – Библиотека с блоками двигателя и инвертора 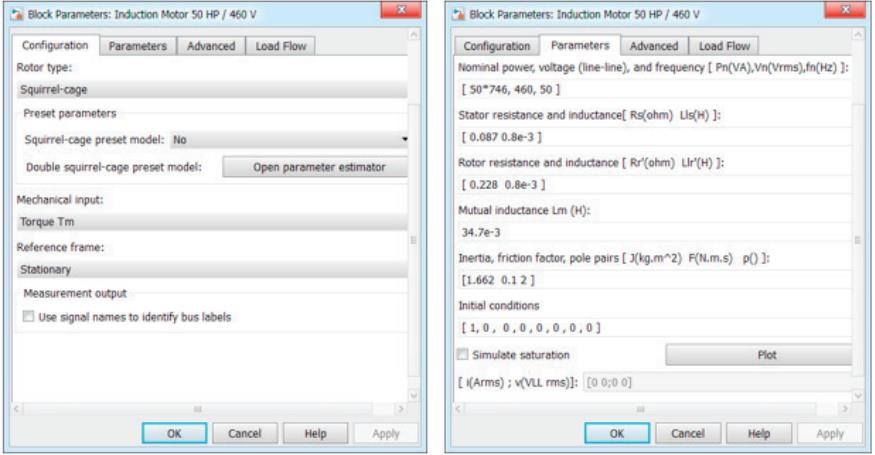 Рисунок 4 – Параметры 3-фазного асинхронного электродвигателя Регулятор скорости (Speed Controller) представлен на рисунке 10. Пределы ограничителя величины сигнала (блок Saturation) показаны на схеме (рисунок 10). Установленные пределы от минус 300 до 300. Блоки расчета токов iqs* и id* показаны на рисунках 11 и 12. В блоке Fcnнеобходимо задать выражение (1): 𝑇𝑒∗ ∗ 0.341/(𝑃ℎ𝑖𝑟 + 1𝑒 − 3), (1) где 𝑇𝑒∗ – коэффициент регулирования скорости; 𝑃ℎ𝑖𝑟 – коэффициент потокосцепления. Блок расчета угла положения θ представлен на рисунке 13. В блоке Fcn1необходимо задать выражение: 34.7𝑒 − 3 ∗ 𝑖𝑞/𝑃ℎ𝑖𝑟 ∗ 0.1557 + 1𝑒 − 3, (2) где 𝑖𝑞 – значение тока во вращающейся двухфазной системе координат. Параметры дискретного интегратора 1 (Discrete-Time Integrator1) и дискретного интегратора 2 (Discrete-Time Integrator2) даны на рисунке 14. В систему векторного управления включен блок расчета потока, иначе Flux Calculation, который показан на рисунке 15. Параметры блока Discrete Transfer Fcn даны на рисунке 16. 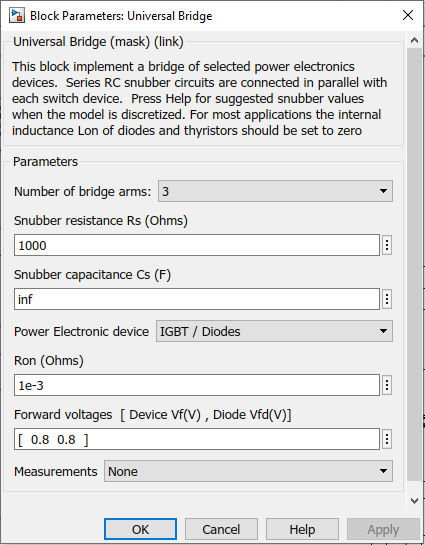 Рисунок 5 – Параметры инвертора 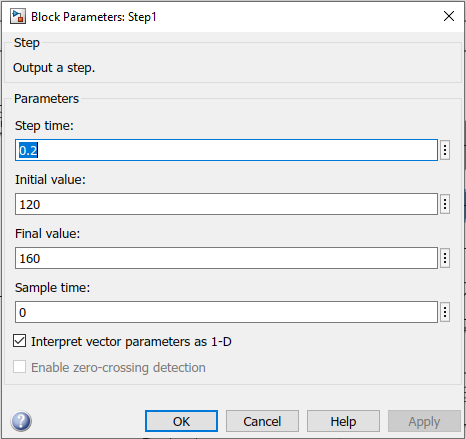 Рисунок 6 – Параметры задатчика скорости 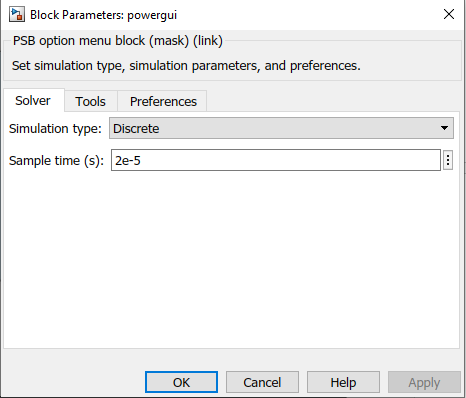 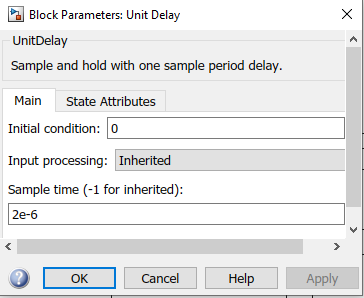 Рисунок 7 – Параметры блоков Powergui и Unit Delay 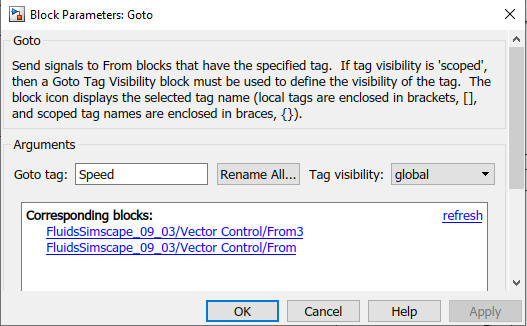 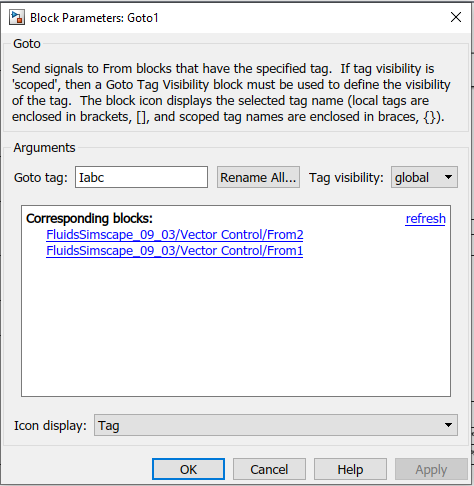 Рисунок 8 – Параметры блоков Goto и Goto1 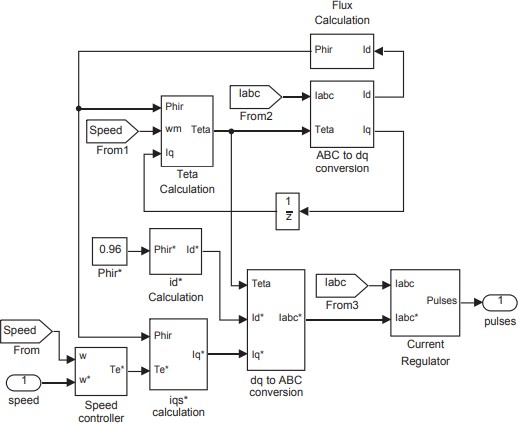 Рисунок 9 – Vector control (Блок векторного управления) 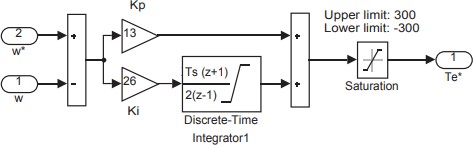 Рисунок 10 – Блок регулирования скорости (Speed controller) 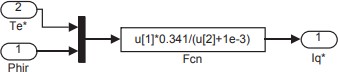 Рисунок 11 – Iqs* calculation (Расчет тока iqs*) 𝑙𝑞 = (2/3) ∗ (2/𝑝) ∗ (𝐿𝑟/𝐿𝑚) ∗ (𝑇𝑒/𝑃ℎ𝑖𝑟) (3) 𝑙𝑞 = 0.341 ∗ (𝑇𝑒/𝑃ℎ𝑖𝑟) (4) где 𝐿𝑚 = 34.7 𝑚𝐻; 𝐿𝑟 = 𝐿𝐼′𝑟 + 𝐿𝑚 = 0.8 + 34.7 = 35.5 𝑚𝐻; 𝑝 = 𝑛𝑏 𝑜𝑓 𝑝𝑜𝑙𝑒𝑠 = 4. 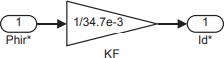 Рисунок 12 – id*calculation (Расчет тока id*) 𝑙𝑑∗ = 𝑃ℎ𝑖𝑟∗/𝐿𝑚 (5) где 𝐿𝑚 = 34.7 𝑚𝐻. 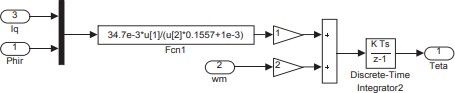 Рисунок 13 – Блок Teta calculation (Расчет угла положения V) 𝑇𝑒𝑡𝑎 = 𝐸𝑙𝑒𝑐𝑡𝑟𝑖𝑐𝑎𝑙 𝑎𝑛𝑔𝑙𝑒 = 𝑖𝑛𝑡𝑒𝑔 (𝑤𝑟 + 𝑤𝑚) (6) 𝑤𝑟 = 𝑅𝑜𝑡𝑜𝑟 𝑓𝑟𝑒𝑞𝑢𝑒𝑛𝑐𝑦 (𝑟𝑎𝑑/𝑠) = 𝐿𝑚 ∗ 𝐼𝑞/(𝑇𝑟 ∗ 𝑃ℎ𝑖𝑟) (7) где 𝑤𝑚 = 𝑅𝑜𝑡𝑜𝑟 𝑚𝑒𝑐ℎ𝑎𝑛𝑖𝑐𝑎𝑙 𝑠𝑝𝑒𝑒𝑑 (𝑟𝑎𝑑/𝑠); 𝐿𝑚 = 34.7 𝑚𝐻; 𝐿𝑟 = 𝐿𝐼′𝑟 + 𝐿𝑚 = 0.8 + 34.7 = 35.5 𝑚𝐻; 𝑅𝑟 = 0.228 𝑜ℎ𝑚𝑠; 𝑇𝑟 = 𝐿𝑟/𝑅𝑟 = 0.1557 𝑠. Преобразователи координат «ABC → dq» и «dq → ABC» (conversion) приведены на рисунках 17 и 18. Функции синусов, косинусов и токов задаются в блоках Fcn. 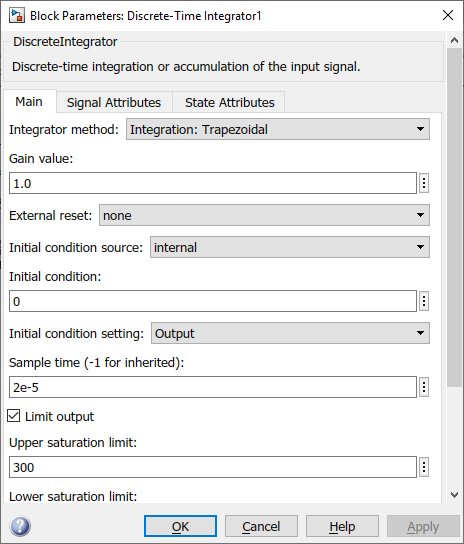 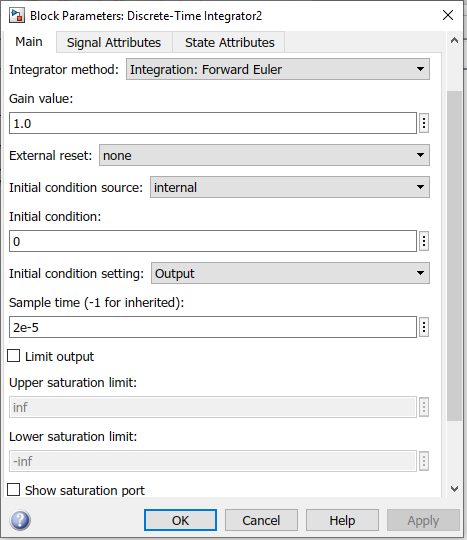 Рисунок 14 – Параметры дискретных интеграторов 1 и 2 В параметрах блока idнеобходимо записать выражение:
В блоке iq:
В блоке ia:
В блоке ib:
Настройки регулятора тока показаны на рисунке 19. Настройка блоков Relay, а также типов данных представлены на рисунке 20. Оператор NOT задается в блоке Logical Operator. Для наглядности выведем на осциллографы Scope графики скорости (рисунок 21) и электромагнитного момента (рисунок 22), используя для этого блок Bus Selector. Линейное напряжение выведем с помощью блока Voltage Measurement (Vab).  Рисунок 15 – Блок Flux Calculation (Расчет потока) 𝑃ℎ𝑖𝑟 = 𝐿𝑚 ∗ 𝐼𝑑/(1 + 𝑇𝑟. 𝑠) (12) где 𝐿𝑚 = 34.7 𝑚𝐻; 𝑇𝑟 = 𝐿𝑟/𝑅𝑟 = 0.1557 𝑠; 𝐿𝑟 = 𝐿𝐼′𝑟 + 𝐿𝑚 = 0.8 + 34.7 = 35.5 𝑚𝐻; 𝑅𝑟 = 0.228 𝑜ℎ𝑚𝑠. 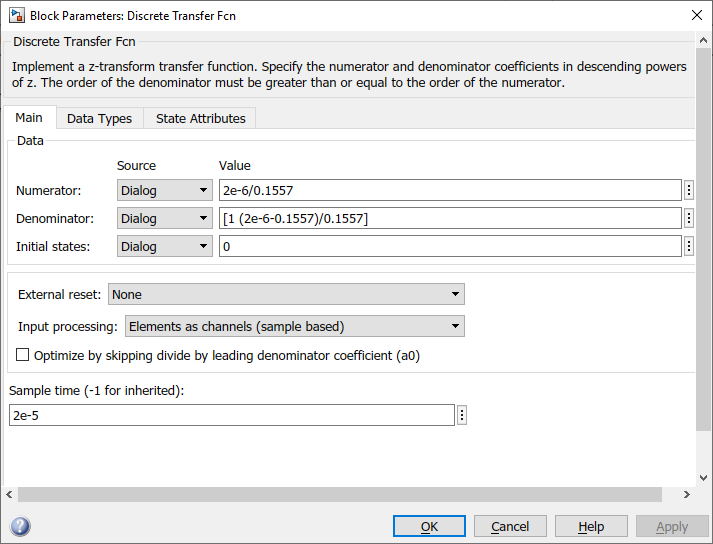 Рисунок 16 – Параметры блока Discrete Transfer Fcn 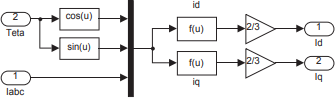 Рисунок 17 – Преобразователь координат ABC – dq 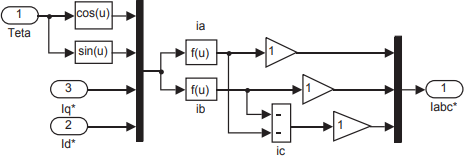 Рисунок 18 – Преобразователь координат dq – ABC 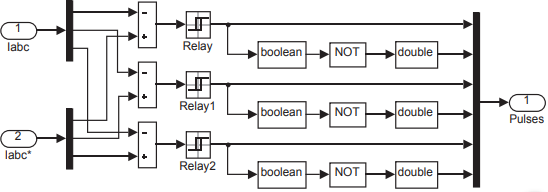 Рисунок 19 – Current Regulator (Регулятор тока) 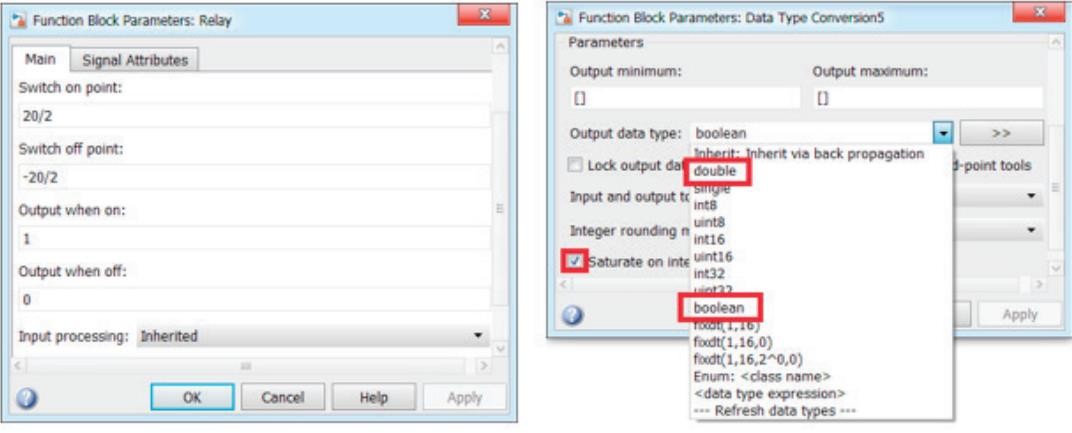 Рисунок 20 – Параметры блоков Relay 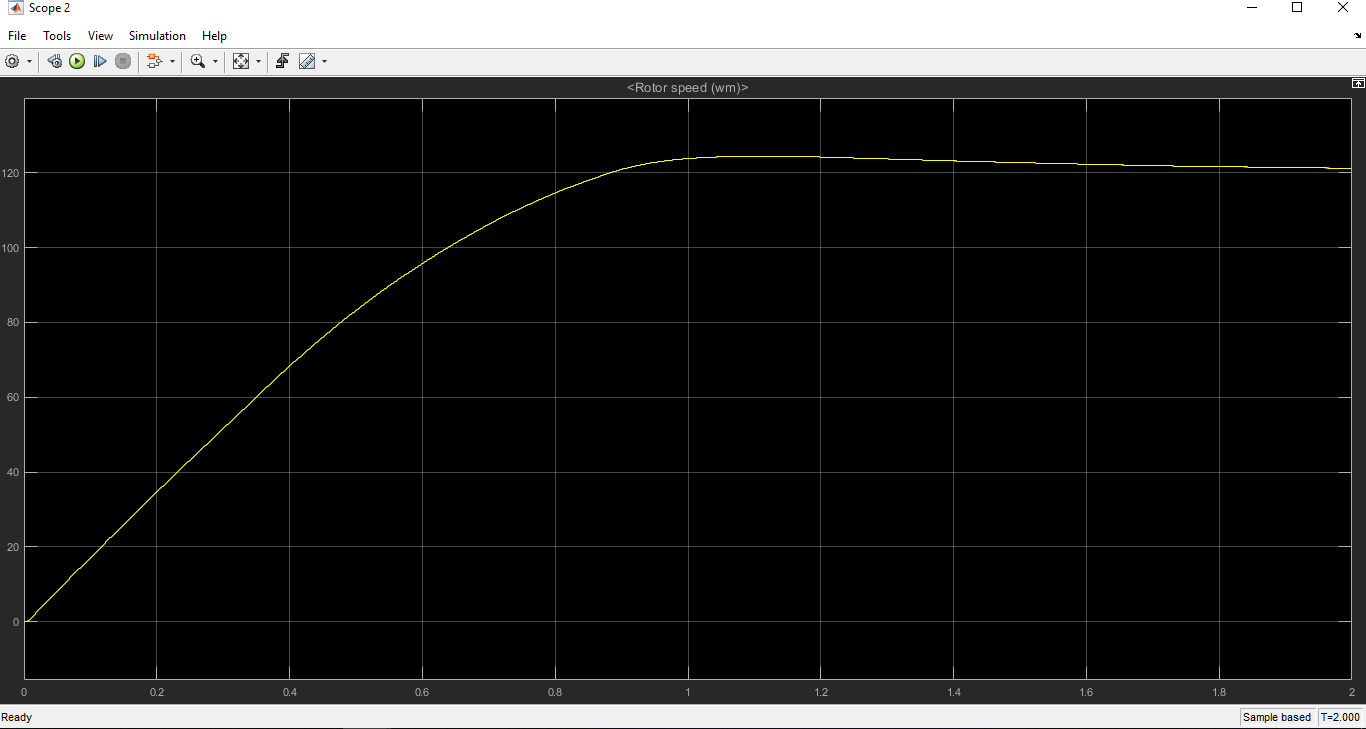 Рисунок 21 – График полученной скорости 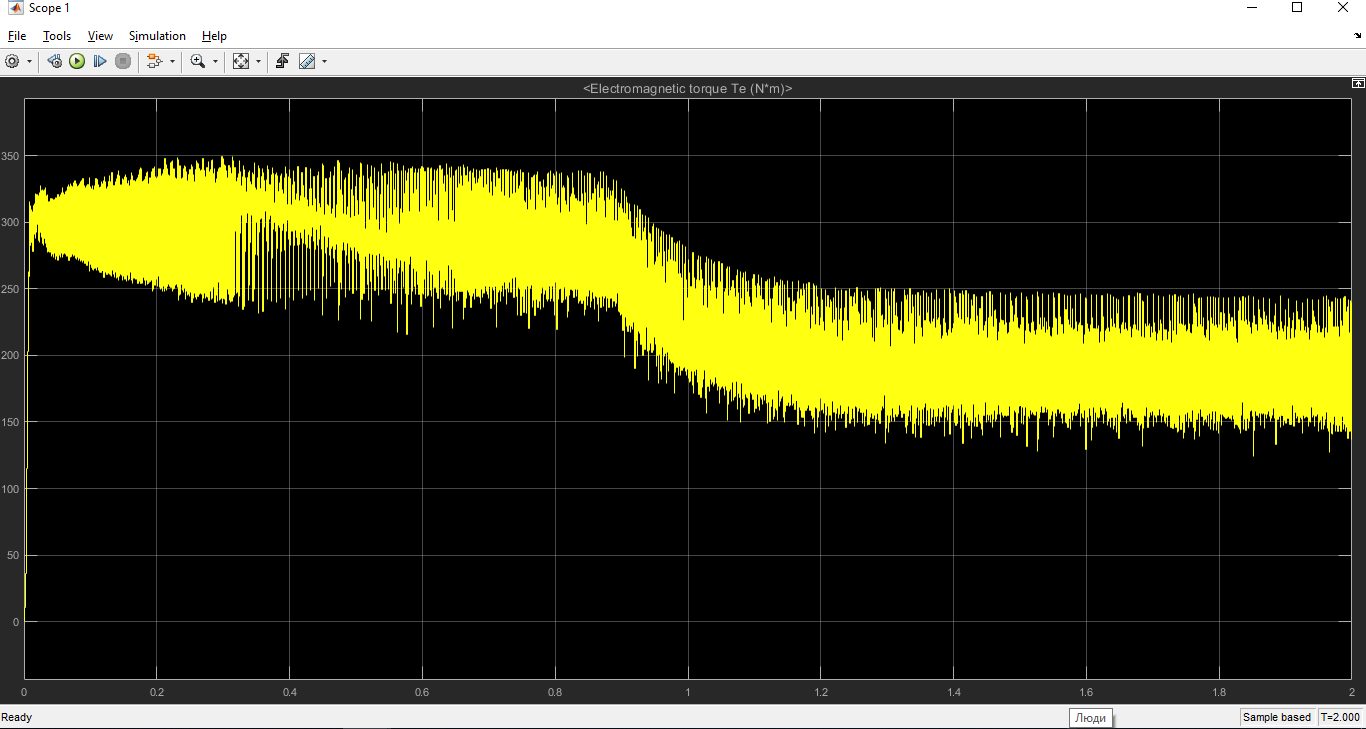 Рисунок 22 – График полученного электромагнитного момента 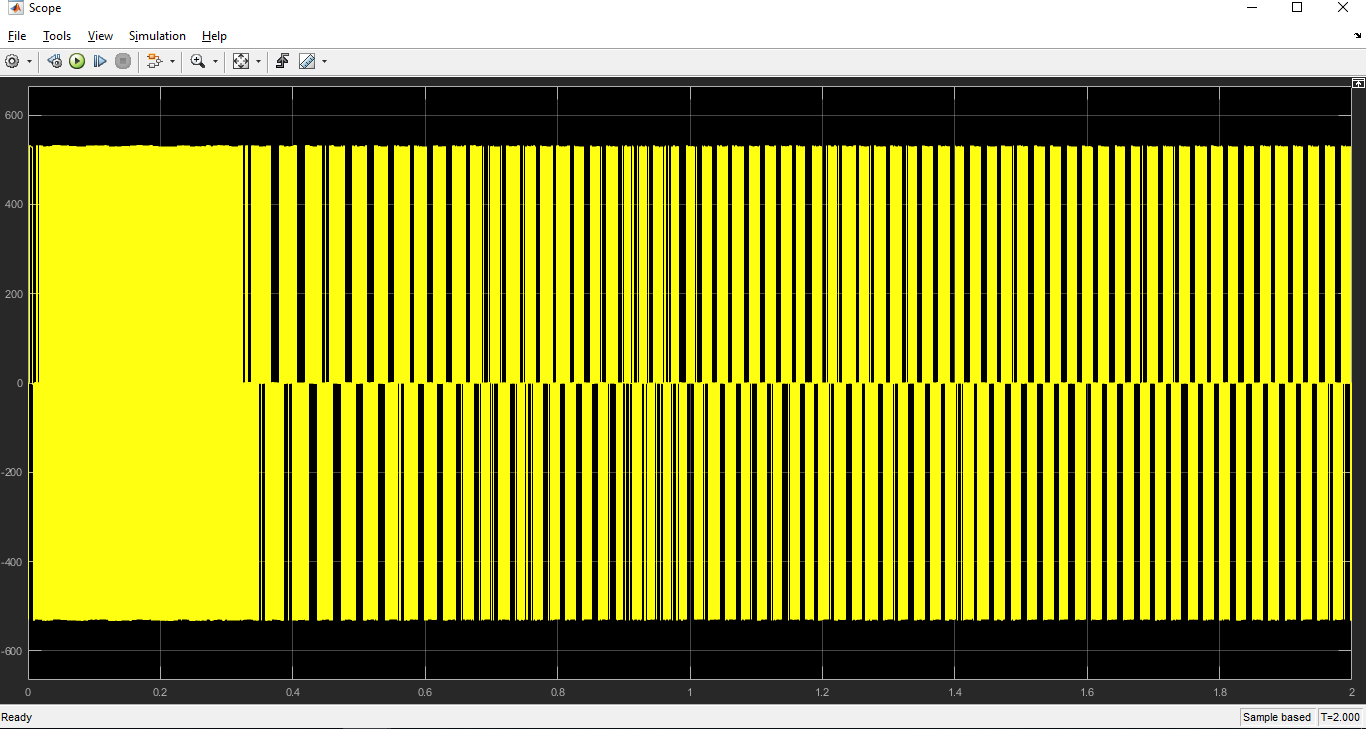 Рисунок 23 – График линейного напряжения Данные графики показывают значения скорости, электромагнитного момента и линейного напряжения для модели, в которой скорость задается с помощью блока Constant, где мы указали значение 120. График полученный скорости (рисунок 21) свидетельствует о том, что модель считается работоспособной и в дальнейшем для получения задуманных результатов подлежит доработке. Итого финальная модель показана на рисунке 24. В данную модель добавлено управление инвертором напряжения с помощью OPC сервера. Скорость, приходящая в блок векторного управления, рассчитывается как разность уставки расхода и реального расхода. С помощью блоков Sinusoidal Measurement (PLL) и Three-Phase Sinusoidal Measurement (PLL) вывели ток и напряжение двигателя, в дальнейшем передали данные значение в OPC сервер. 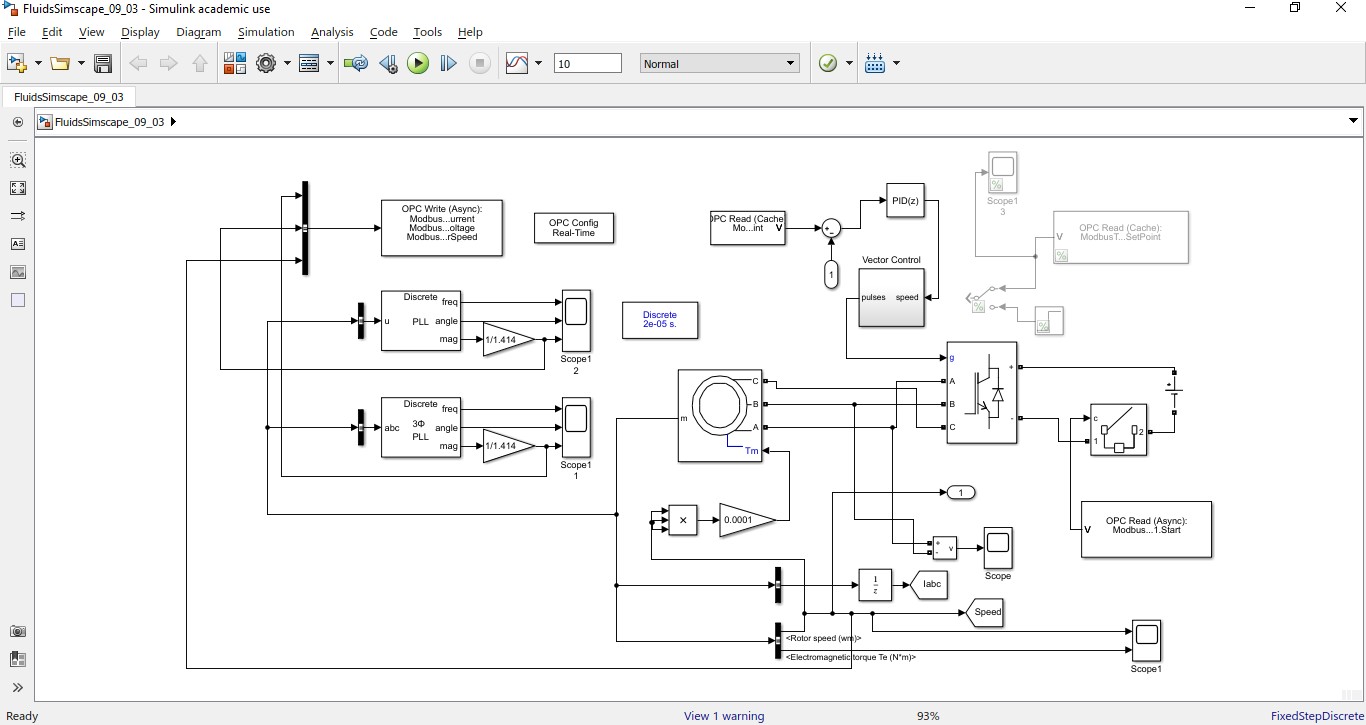 Рисунок 24 – Финальная модель электродвигателя |