Курсовая работа микропроцессорная техника. Разработка микроконтроллерного устройства управления шаговым двигателем с режимом микрошага
 Скачать 2.4 Mb. Скачать 2.4 Mb.
|

4 Проектирование структурной схемы устройстваСистема управления шаговым двигателем в основном состоит из ЭВМ, микроконтроллера PIC16F877A, драйвера шагового двигателя и схемы. Структурная схема представлена в Приложении А и показана на рисунке 3. 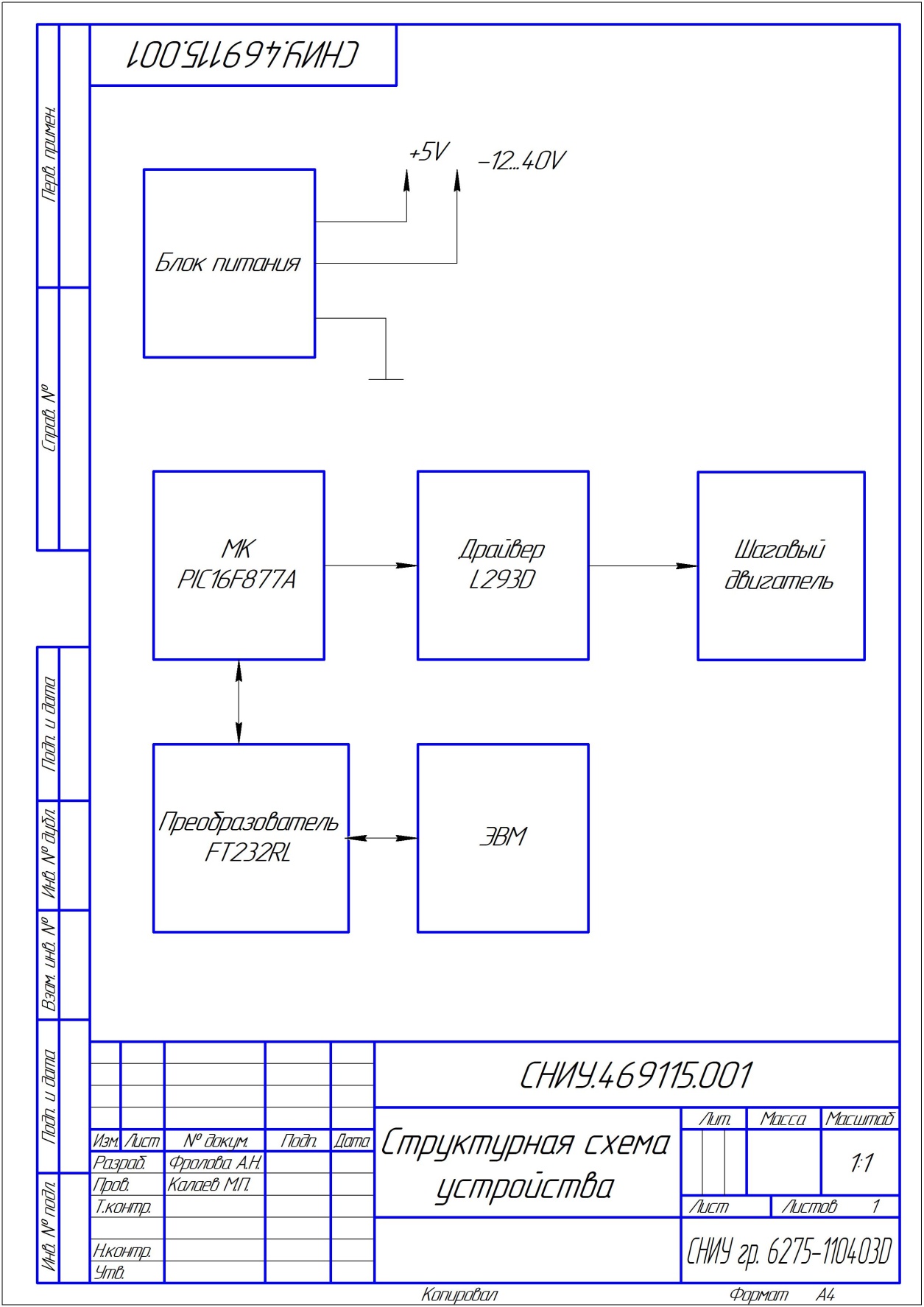 Рисунок 3 – Структурная схема устройства Шаговый двигатель управляется командами с ЭВМ. Получаемый сигнал преобразуется с помощью FT232RL. Для работы устройства был выбран драйвер шагового двигателя ULN2003a. Драйвер содержит в себе силовую часть и контроллер. Силовая часть драйвера — это полупроводниковый усилитель мощности, задача которого преобразовать подаваемые на фазы импульсы тока в перемещения ротора: один импульс — один точный шаг или микрошаг. 5. Проектирование алгоритма работы устройства Для того чтобы понять, как работает устройство, необходимо объяснить в какой последовательности нужно выполнять действия при переработке исходного материала в требуемый результат, то есть разработать алгоритм программы. Алгоритм работы управляющей программы микроконтроллера представлен в Приложении Г. В начале программы устанавливаются макросы для конфигурационных битов блока микроконтроллера и заголовочных файлов библиотеки. В первой строке определяем частоту резонатора, которая необходима для процедуры задержки. Далее определяется скорость и количество шагов, задаются макросы направления по часовой стрелке и против. Другие макросы используются для определения параметров, связанных с пользователем. Задаются основные функции инициализации портов, направления движения и задержки. Сначала подаётся логическая 1 на порт микроконтроллера, потом следует задержка, далее подаётся логический 0 и опять следует задержка и всё повторяется заново. Далее происходит инициализация системы для установки вывода PORT B как выходного порта. В основной функции мы управляем двигателем по часовой стрелке, используя режим полного привода в зависимости от шагов, и после нескольких секунд задержки мы снова вращаем двигатель против часовой стрелки, используя режим волнового привода. Есть три функции, определенные для управления двигателем с направлением по часовой стрелке и против часовой стрелки: 1. Полный привод; 2. Полупривод; 3. Волновой привод. Полный привод: если два статорных электромагнита находятся под напряжением одновременно, двигатель будет работать с полным крутящим моментом, называемым режимом последовательности полного привода. Таблица 5 – Последовательность управления при полном приводе
Полупривод: когда поочередно одна и две фазы находятся под напряжением, двигатель будет работать в режиме полупривода. Он используется для увеличения углового разрешения. Недостатком является меньший крутящий момент, создаваемый в этом движении. Таблица 6 – Последовательность управления при полуприводе
Волновой привод: в этом режиме включается один электромагнит статора. Он длится 4 шага, как и режим полного привода. Он потребляет низкую мощность при низком крутящем моменте. Таблица 7 – Последовательность управления при волновом приводе
|