Курсовая работа микропроцессорная техника. Разработка микроконтроллерного устройства управления шаговым двигателем с режимом микрошага
 Скачать 2.4 Mb. Скачать 2.4 Mb.
|

 МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ федеральное государственное автономное образовательное учреждение высшего образования «Самарский национальный исследовательский университет имени академика С.П. Королева» Институт информатики, математики и электроники Факультет электроники и приборостроения Кафедра конструирования и технологии электронных систем и устройств Задание на курсовую работу по дисциплине Микропроцессорная техника Студенту ______. группы 1. Тема: Разработка микроконтроллерного устройства управления шаговым двигателем с режимом микрошага утверждена приказом по университету от «____»______________20___ г. №____ 2. Исходные данные к ВКР: 2.1. Диапазон измеряемых давлений 0.2 – 1.3атм 2.2. Группа РЭС-8. 2.3. Питание – сеть 27 В. 2.4. Габариты – не более 200х200х100. 2.5. Масса – не более 5кг. 2.6. Программа выпуска – единичное. 2.7. Среднее время наработки до отказа 5 лет и более. 2.8. Вероятность безотказной работы – 0,97 и более. 3. Задачи, решаемые в курсовом проекте: должность, степень подпись И.О.Фамилия 6. Дата выдачи задания: «____»_______________20___ г. 7. Срок представления на кафедру законченной ВКР: «____»___________20__г. Руководитель ВКР Калаев М.П. // должность, степень подпись И.О.Фамилия Задание принял к исполнению __________________ // РЕФЕРАТ Пояснительная записка: 36 страницы, 7 таблиц, 10 источников. Графическая часть: 4 листа формата А4. ШАГОВЫЙ ДВИГАТЕЛЬ, РЕЖИМ МИКРОШАГА, ПРИНЦИПИАЛЬНАЯ СХЕМА, МИКРОКОНТРОЛЛЕР, ПЕЧАТНАЯ ПЛАТА, ЭЛЕМЕНТНАЯ БАЗА, АЛГОРИТМ, ПРОГРАММА. Цель работы – разработка микроконтроллерного устройства управления шаговым двигателем с режимом микрошага. В процессе работы использованы пакеты прикладных программ автоматизированного проектирования, а также офисная программа для работы с текстовыми документами. В результате работы было выбран оптимальный микроконтроллер: ATmega48-20PU. Спроектированы структурная, функциональная и принципиальная схема устройства, а также алгоритм работы устройства. Разработан программный код микроконтроллера. СОДЕРЖАНИЕ4 Проектирование структурной схемы устройства 13 6 Проектирование принципиальной схемы устройства 17 7 Разработка программного кода устройства 23 ВВЕДЕНИЕ Шаговый двигатель - это электромеханическое устройство, преобразующие сигнал управления в угловое (или линейное) перемещение ротора с фиксацией его в заданном положении без устройств обратной связи. Шаговые двигатели обладают некоторыми уникальными свойствами, что делает порой их исключительно удобными для применения или даже незаменимыми: Угол поворота ротора определяется числом импульсов, которые подаются на двигатель, прецизионное позиционирование и повторяемость. Хорошие шаговые двигатели имеют точность 3-5% от величины шага. Эта ошибка не накапливается от шага к шагу быстрого старта/остановки/реверсирования, высокая надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически определяется сроком службы подшипников. Шаговые двигатели имеют широкий диапазон угловых разрешений. Более грубые моторы обычно вращаются на 90° за шаг, в то время как прецизионные двигатели могут иметь разрешение 1,8° или 0,72° на шаг. Если контроллер позволяет, то возможно использование полушагового режима или режима с более мелким дроблением шага (микрошаговый режим), при этом на обмотки подаются дробные значения напряжений, зачастую формируемые при помощи широтно-импульсной модуляции. Рост степени интеграции в микропроцессорной технике и переход от микропроцессоров к микроконтроллерам с встроенным набором специализированных периферийных устройств, сделали необратимой тенденцию массовой замены аналоговых систем управления приводами на системы прямого цифрового управления. Низкая цена, экономичность, быстродействие, простота использования, наличие достаточного количества портов ввода/вывода способствуют применению микроконтроллеров в различных областях. Анализ технического задания Шаговый двигатель - это электромеханическое устройство, преобразующие сигнал управления в угловое (или линейное) перемещение ротора с фиксацией его в заданном положении без устройств обратной связи. Микрошаговый режим – это режим, при котором происходит дробление шага большее чем 1/2 за счет получения плавно вращающегося поля статора, т.е. ток плавно снижается на одной обмотке и плавно нарастает на другой. Благодаря этому ротор шагового двигателя теоретически можно зафиксировать в любой произвольной позиции, если установить правильное отношение токов в обмотках (фазах). Сфера применения шаговых двигателей: подача пленки и изменение масштаба изображения в камерах, факсимильные аппараты, принтерах, копировальные машины, лотки подачи и сортировщики бумаги, а также дисководы, автомобилестроение, светотехническое оборудование, теплотехника, станки с ЧПУ и т.д. В задании на курсовой проект требуется выбрать оптимальный микроконтроллер с использованием комплексного критерия качества, провести анализ и описание характеристик выбранного микроконтроллера, спроектировать структурную, функциональную и принципиальную схему устройства, разработать программный код и алгоритм работы устройства. В данном проекте используется униполярный шаговый двигатель NEMA 17 [2], Драйвер шагового двигателя A4983 [3] и микроконтроллер ATMega48-20PU [4]. 2. Выбор оптимального микроконтроллера использованием комплексного критерия качества При разработке устройства возникает необходимость в выборе микроконтроллера, удовлетворяющего требованиям по производительности, надежности, условиям применения и т.д. В процессе анализа рынка микроконтроллеров из семейств HCS08, ATMegaX8, PIC и MCU. Для сравнения семейств было выбрано 4 модели: MC908AB32MFUE (№1), ATMega48 -20PU (№2), PIC18F4520 (№3) и Z86E0612PSG (№4). В таблице 1 приведены характеристики сравниваемых МК. Таблица 1 - Технические характеристики сравниваемых микроконтроллеров
В качестве критерия выбора были определены следующие характеристики: тактовая частота, объем ОЗУ (RAM), размер Flash-памяти, количество линий ввода-вывода, наличие отладки и внутрисхемного программирования. В таблице 2 приведены значения коэффициентов (весов) качества критерия выбора для микроконтроллеров. Таблица 2 - Значения коэффициентов качества критериев выбора
Сравнение параметров данных устройств приведены в таблице 3. Таблица 3 - Сравнение параметров микроконтроллеров
Среди рассмотренных микроконтроллеров наблюдается отличия между соотношением коэффициента качества и критерия оптимальности, что говорит нам о большой разнице характеристик рассмотренных микроконтроллеров, а также показало, что более дорогие контроллеры не обязательно будут иметь лучшие показатели. По итогу проведения системного анализа был выбран микроконтроллер ATMega48-20PU, как самый оптимальный для работы. ATMega48/ATMega88/ATMega168 — это малопотребляющие 8 битные КМОП микроконтроллеры с AVR RISC архитектурой. Выполняя команды за один цикл, ATMega48/ATMega88/ATMega168 достигают производительности 1 MIPS при частоте задающего генератора 1 МГц, что позволяет разработчику оптимизировать отношение потребления к производительности. AVR ядро объединяет богатую систему команд и 32 рабочих регистра общего назначения. Все 32 регистра непосредственно связаны с арифметико-логическим устройством (АЛУ), что позволяет получить доступ к двум независимым регистрам при выполнении одной команды. В результате эта архитектура позволяет обеспечить в десятки раз большую производительность, чем стандартная CISC архитектура. Отличительные особенности 8-ми битных AVR микроконтроллеров серии ATMega : Высококачественный низкопотребляющий 8- битный AVR микроконтроллер Передовая RISC архитектура Энергонезависимая память программ и данных 30 команд, большинство которых выполняется за один тактовый цикл Программируемый последовательный USART Ведущий/ведомый SPI интерфейс Пять режимов пониженного потребления: Idle, ADC Noise Reduction, Power-Save, Power-down и Standby Счетчик реального времени с отдельным генератором 3. Анализ характеристик и описание выбранного микроконтроллера Для выполнения данной работы решено использовать микроконтроллер ATMega48. Таблица 4 – Технические параметры микроконтроллера ATMega48
Преимуществами используемого микроконтроллера является следующее: Особенности микроконтроллера: 8 - битный синхронный таймер/счетчик 0 Программируемый сторожевой таймер со встроенным генератором 8 - битный синхронный таймер/счетчик 0 10 – разрядный предварительный делитель Внешний счетчик событий Выход сравнения или 8 – битного ШИМ сигнала 8 - битный синхронный таймер/счетчик 2 10 – разрядный предварительный делитель Внешний счетчик событий Выход сравнения или 8 – битного ШИМ сигнала 32 кГц генератор для выполнения функций часов реального времени Два 16- битных синхронных таймера/счетчика 1 и 3 10 – разрядный делитель Вход захвата с подавителем шумов Внешний счетчик событий Три выхода сравнения или 16- битного сигнала с ШИМ Выход модулятора сравнения 8 канальный 10 битный SAR АЦП 8 несимметричных каналов 7 дифференциальных каналов 2 дифференциальных канала с программируемым коэффициентом усиления 1, 10 или 100 Встроенный аналоговый компаратор Байт- ориентированный последовательный 2- проводный интерфейс Двойной программируемый последовательный USART Ведущий/ведомый SPI интерфейс  Рисунок 1 – Назначение выводов микроконтроллера 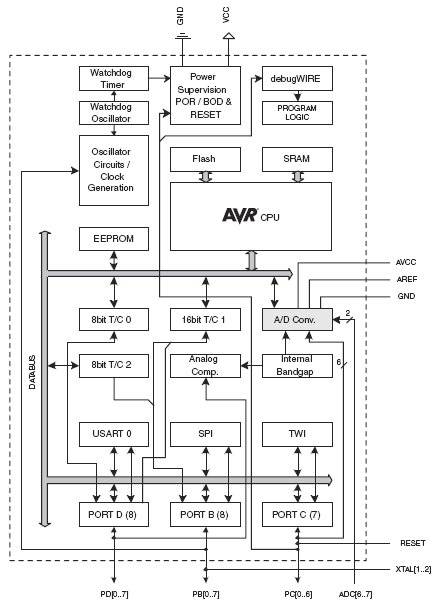 Рисунок 2 – Структурная схема микроконтроллера ATMega48 С функциональной точки зрения в контроллере можно выделить: ● процессор, к которому относятся арифметически–логическое устройство (АЛУ), подключённое непосредственно к 32 рабочим регистрам; ● блок управления программой, содержащий память программы, регистр команд, дешифратор, счетчик команд и двухуровневый стек; ● каждая из областей памяти (ОЗУ и EEPROM) имеет своё адресное пространство; ● блок таймеров, включающий 2 8–разрядных счетчика/таймера (T0 и T2), 16-разрядный таймер/счётчик (T1), сторожевой таймер WDT; ● блок синхронизации и специальных функций, включающий модуль управления (узел выбора типа генератора, узел сброса и др.) и регистр конфигурации CONFIG; |