ПОЯСНИТЕЛЬНАЯ ЗАПИСКА КУРСОВОГО ПРОЕКТА электронные устройства автоматики. ЭУА_КРСЧ. Разработка схемы стабилизации частоты вращения
 Скачать 1.15 Mb. Скачать 1.15 Mb.
|

|
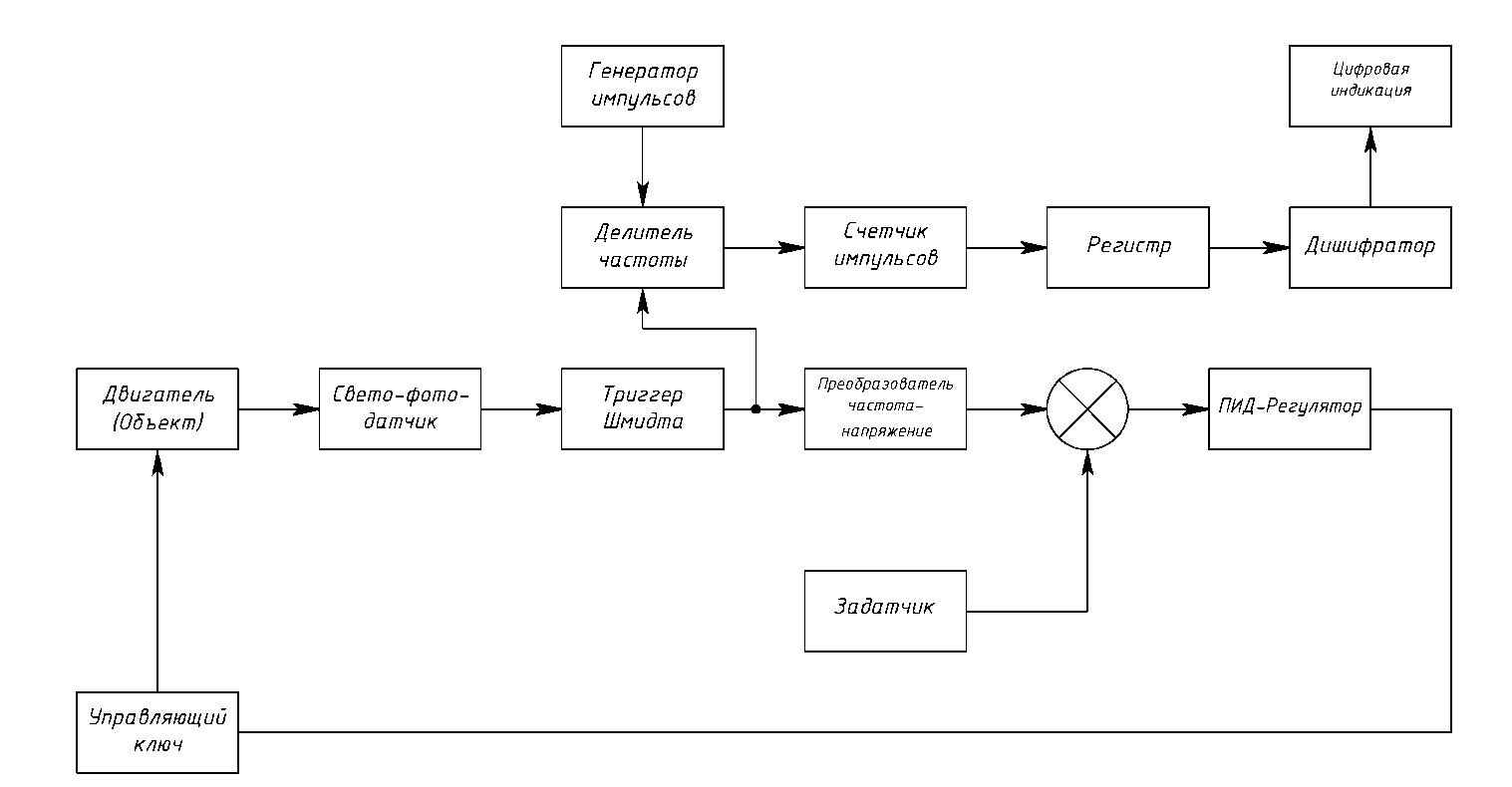
Учреждение образования «БЕЛЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ» Факультет химической технологии и техники Кафедра АТПиЭ Специальность 1-53 01 01 Специализация Автоматизация технологических процессов и производств ПОЯСНИТЕЛЬНАЯ ЗАПИСКА КУРСОВОГО ПРОЕКТА По дисциплине электронные устройства автоматики Тема: разработка схемы стабилизации частоты вращения Исполнитель студент 3-го курса В.Н. Новицкий Руководитель доцент, к.т.н. И.О. Оробей Курсовой проект защищен с оценкой __________________________ Минск 2021  Реферат РефератПояснительная записка к курсовому проекту содержит 25 листов, 25 рисунка, 3 таблицы и 7 использованных источников. СХЕМА СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ, СТРУКТУРНАЯ СХЕМА СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ, СИНТЕЗ,, ВРЕМЕННАЯ ДИАГРАММА, ЭЛЕКТРИЧЕСКА ПРИНЦИПИАЛЬНАЯ С ХЕМА Целью курсового проекта является разработка схемы стабилизации частоты вращения Для осуществления поставленной задачи было проделано: – разработка структурной (функциональной) схемы; – разработка схемы светодиода и фотодатчика; – очистка от шумов; – наладка схемы преобразователя частота-напряжение; – расчет коэффициентов регулятора и его схем. – разработка схемы преобразования в ШИМ. The purpose of the course project is to develop a speed stabilization scheme. To implement the task, the following was done: – development of a structural (functional) scheme; – development of the LED and photo sensor circuit; – noise cleaning; – adjustment of the frequency-voltage converter circuit; – calculation of the coefficients of the regulator and its circuits. – development of a PWM conversion scheme. СодержаниеВведение 5 2.1 Разработка схемы светодиода и фотодатчика 7 940 7 2.2 Очистка от шумов (расчет схемы триггера Шмитта) 8 Схема не инвертирующего триггера Шмитта: 8 8 Рисунок 2.3 – Не инвертирующий триггер Шмитта 8 2.3 Наладка схемы преобразователя частота-напряжение 9 2.4 Разработка схемы преобразователя с регулятоа в ШИМ 12 2.5 Расчет усилителя мощности для управления двигателя с реверсом 13 Для реализации будет использоваться транзистор FGA40N65SMD. Минимальное напряжение для открытия составляет 3.5В. 14 2.6 Расчет коэфициентов регулятора и его схемы 14 2.7 Алгоритм управления индикацией 17 3. Принципиальная схема блока питания 21 Выберем ОУ LF356N 21 5 Временные диаграммы 23 Заключение 25 Список использованной литературы 26 |
 Введение
Введение
| Тип светодиода | λ,мкм | Iпр,мА | Uпр |
| TSAL-6100 | 940 | 100 | 1.35 |
Таблица 2
| Тип фотодиода | Sинт мА/лм | Uр,В | Диапазон спектр. характеристики Δλmin…max, нм | Фп1. Лм*Гц:-1/2 | Iтемн, А |
| L-53P3C | 0,6 | 9 | 940 | 1*10^-11 | 1*10^-7 |
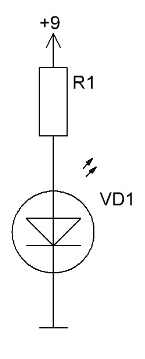
Рисунок 2.1 – Схема включения светодиода
Для того что бы светодиод излучал свет в необходимом нам диапазоне и не сгорел, для этого необходимо его запитать постоянным напряжением ограничив ток резистором, номинал которого необходимо рассчитать.
Т.к. у нас имеется значение прямого тока диода из таблицы 1 и мы сами выберем питающее напряжение, то расчет сопротивления резистора рассчитывается по закону Ома:

В соответствии с рядом Е24: R1 = 180 Ом
Каскад усилителя выполним на базе фотогенератора
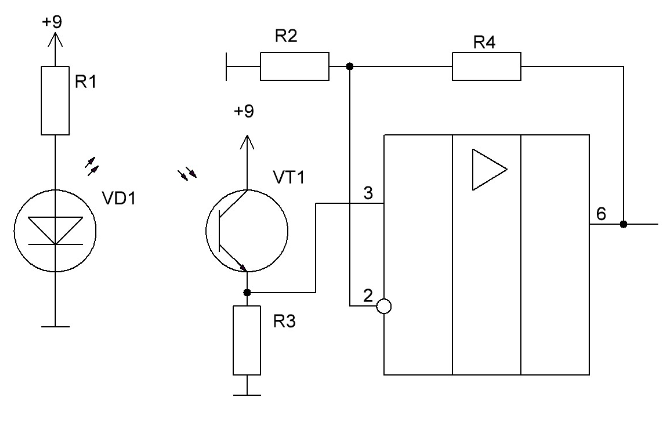
Рисунок 2.1 – Схема энкодера
Ku=0.9*E/UR.
UR=Ilight*R2
Пусть К = 150, значит R3 = 20571 Ом
Из ряда Е24: R3 = 20 кОм.
Ku=(R5/R4+1) R5/R4=149 R5=750кОм; R3=5кОм
Ku’=(750/5)+1=151
Следовательно
Uup= Ku’*UR1=151*20000*3.5*10-6=10.57В
Udown = Ku’*UR1t=151*20000*10*10-9=3*10-2В
2.2 Очистка от шумов (расчет схемы триггера Шмитта)
Схема не инвертирующего триггера Шмитта:
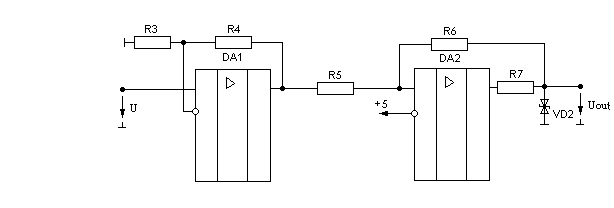
Рисунок 2.3 – Не инвертирующий триггер Шмитта
Из исходных данных имеется ширина гистерезиса
 и уровень сигнала после усилителя = 4.9 В. Значит Uref = 2.5В
и уровень сигнала после усилителя = 4.9 В. Значит Uref = 2.5ВФормула для определения ширины гистерезиса для не инвертирующего триггера Шмитта:

Задавшись R2=750 кОм, получим:

Выбираем из ряда Е24 ближайший: R1=27 кОм.
Для задания 3В воспользуемся схемой на резистивном делителе, которую реализуем с помощью повторителя напряжения на ОУ от основной схемы преобразования. Напряжение питания согласно заданию E = 5 В.

Рисунок 2.9 – Делитель напряжения
Для расчета резистивного делителя R7, R8 зададимся током через делитель Id = 1 мА, тогда номиналы резисторов:
В соответствии с рядом Е24 R8 = 2.7кОм, R7 = 2.7 кОм.
2.3 Наладка схемы преобразователя частота-напряжение
Для дальнейшего управления процессом преобразуем наш сигнал определенной частоты в уровень напряжения. Для этого воспользуемся демодулятором следующего вида:
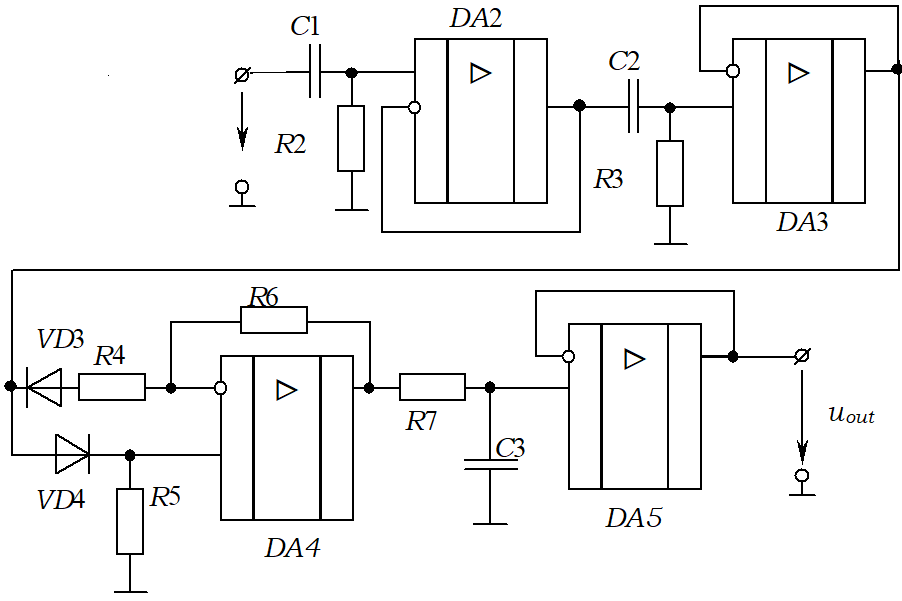
Рисунок 2.5 – Схема частотного демодулятора
Дано:
Номинальная частота двигателя: nnom = 4220 об/мин.
Число прорезей: N = 32.
Поскольку необходимо стабилизировать частоту на 70% от номинальной, то частотный детектор должен работать на частоте:


Будем использовать фильтр высокой частоты второго порядка.
Т.к необходим К = 0.5, то R2 = 5кОм, а C1 = 12 нФ.
Рисунок 2.6 - АЧХ фильтра высоких частот
После расчета следует получить передаточную функцию детектора. Ограничители на стабилитронах не влияют на частоту, но они определяют амплитуду выходного напряжения на выходе преобразователя. Основные преобразования напряжения в частоту осуществляются за счет фильтра высокой частоты (C1,R2) и (C2,R3), и данный фильтр определяет коэффициент передачи схемы.
Для компенсации падения напряжения на открытых диодах осуществляется включением их у обратную связь ОУ.
Если выбрать сопротивление резисторов, то можно получить K = 1;

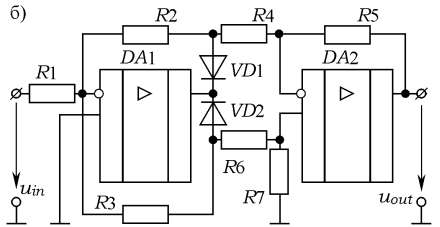
Инерционность, т.е. насколько быстро сигнал напряжения на выходе изменится при изменении частоты на входе, зависит от фильтра низкой частоты (C3,R7), и хорошо описывается апериодическим звеном первого порядка. Если добавить еще одну ступень фильтра ФНЧ, то для отражения инерционности следует использовать апериодическое звено второго порядка.
Выбор постоянной времени ФНЧ фильтра не столь требователен, как для фильтра высокой частоты. Возьмем постоянную ФНЧ фильтра в 50 раз больше чем ФВЧ, тогда с учетом удвоения частоты за счет схемы взятия модуля (R7=250кОм; С3=27 пФ). Амплитуда уменьшится почти в 100 раз

Определим коэффициент передачи преобразователя. Данный детектор не идеален и почти линейно будет осуществлять в ограниченной области частот (рис).
Основной формулой для расчета коэффициента является формула для модуля ФВЧ фильтра.
.Пускай дельта частоты будет 5%, тогда
 ;
;K(wo+
 =0.529;
=0.529; ;
;K(wo-
=0.491.Промежуточный коэффициент передачи будет:
K’=3.815*10-5
Тогда общий коэффициент для двух фильтров, при условии, что ОУ имеют ограничение на 12 В будет

K = 7.278*10-9
В безразмерном виде одного каскада коэффициент будет
K’=0.739
Тогда общий коэффициент будет
K = (K’)2 = 0.547
С учетом того, что при прохождении через фильтр происходит сдвиг фаз. То необходимо оценить и сдвиг фаз, который приводит к появлению запаздывания.
Постоянная времени апериодического звена будет определятся произведением (C3,R7).
Тогда:
Tf = 500 × 75 × 10-9 = 0.003
Итоговая передаточная функция:
2.4 Разработка схемы преобразователя с регулятоа в ШИМ
Преобразование сигнала с регулятора в ШИМ будет осуществляться при помощи генератора пилообразного напряжения, построенного на 555 таймере и компаратора. Схема представлена на рисунке 2.7.
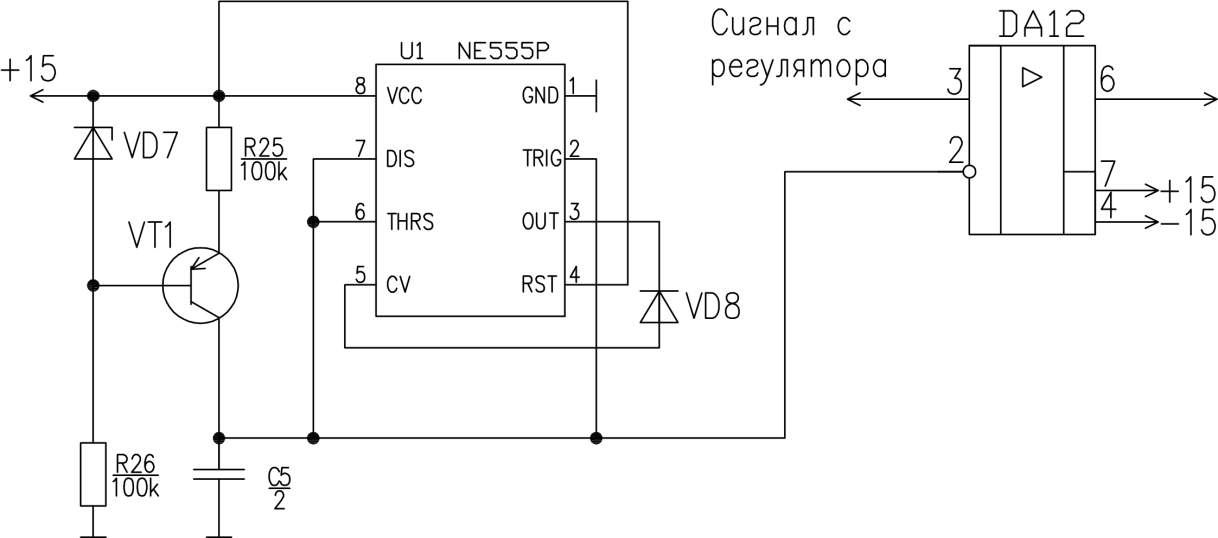
Рисунок 2.7 – Схема ШИМ
Информационный сигнал от регулятора поступает на не инвертирующий вход компаратора, а сигнал ГПН – на инвертирующий. В результате на выходе компаратора получаем:
Несущая частота на выходе ГПН выбирается таким образом, чтобы она была намного меньше постоянной времени двигателя. В данном случае примем частоту равной 2,8 МГц.


2.5 Расчет усилителя мощности для управления двигателя с реверсом
Будет использоваться схема на MOSFET транзисторах.
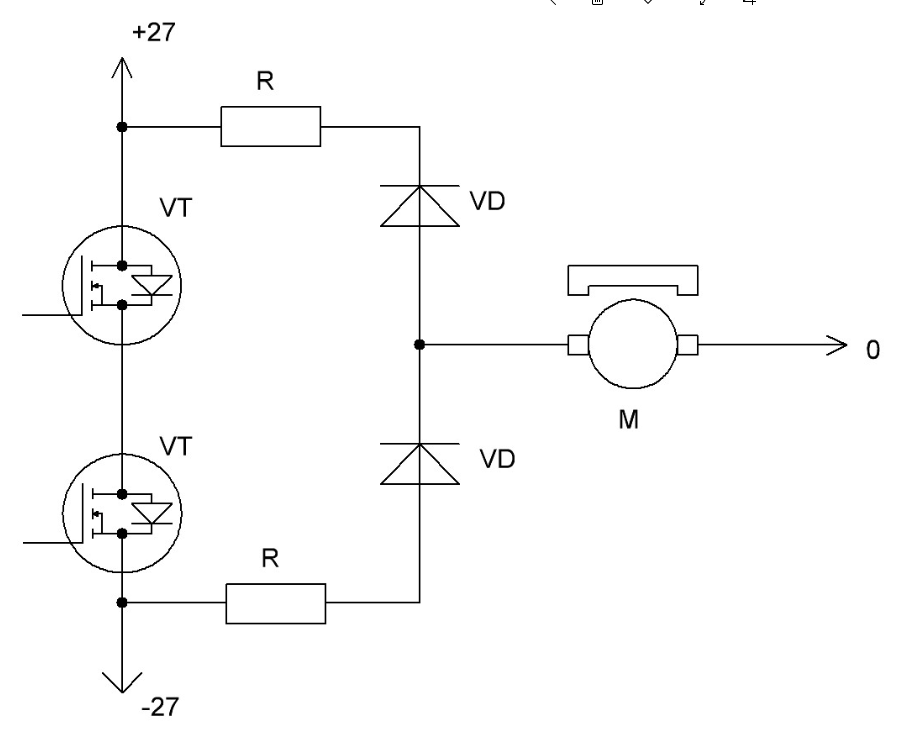
Рисунок 2.10 – Принцип работы мостовой схемы.
Для реализации будет использоваться транзистор FGA40N65SMD. Минимальное напряжение для открытия составляет 3.5В.
2.6 Расчет коэфициентов регулятора и его схемы
Перед тем как непосредственно перейти к расчету коэффициентов регулятора необходима получить передаточную функцию объекта. В качестве объекта у нас выступает двигатель марки Maxon 226759 RE 25 Ø25 mm параметры которого записаны в таблице 3.
Таблица 3
| U,В | nном,об/мин | Iном,А | L, мГн | R, Ом | Tm, мс |
| 27 | 5280 | 0.5 | 0,115 | 1.23 | 4.37 |
Расчитаем номинальную частоту вращения двигателя:

Передаточную функцию двигателя получим по следующей формуле:
Далее поочередно посчитаем каждый из коэффициентов:


Передаточная фунция в размерном виде имеет вид:

Объектом фактически является двигатель, но его передаточная функция является не полным отражением объекта управления, так как для управления двигателем используются различные приборы, влияние которых необходимо отразить в передаточной объекта. Так необходимо получить коэффициент усиления ПИПа, передаточную демодулятора и коэффициент усиления ИМ.
Коэф усиления ИМ:

Коэффициент усиления ПИПа рассчитывается исходя из максимальной частоте на входе и максимальному напряжению на выходе:
Получив, передаточную объекта, переедем к определению коэффициентов регулятора. Существуют различные способы определения коэффициентов регулятора, и мы воспользуемся методом Циглера-Никельсона. Этот метод дает, довольно таки, точное регулирование, однако затягивает переходной процесс.
Метод Циглера-Никельсона заключается в следующем, мы составим структуру управления в Simulink, чтобы смоделировать систему, таким образом чтобы на месте регулятора было усилительное звено (если объект астатический, т.е. в объекте присутствует p, то следует ввести звено дифференцирования идеальное или реальное). Моделируем. Если система устойчива, то увеличиваем коэффициент в 2 раза. Если система опять устойчива, то снова увеличиваем. При достижении неустойчивого характера переходного процесса, начинаем искать значение k, при котором будут наблюдаться устойчивые автоколебания. Производим измерение времени периода автоколебаний и фиксируем значение k при котором возникли автоколебания. Пересчитываем значения настроек регулятора через коэффициенты Циклера-Николсона (МЦН), которые имеют следующий вид:


где
 - коэффициент усиления, при которой в системе наблюдается устойчивые автоколебания;
- коэффициент усиления, при которой в системе наблюдается устойчивые автоколебания;  - период автоколебаний.
- период автоколебаний.Связь между параллельно-последовательной и параллельной структурой ПИД регулятора
Tiz=Kp*Ti
Tdr=Td/Kp
Далее промоделируем систему управления с рассчитанными коэффициентами. Схема управления имеет следующий вид:
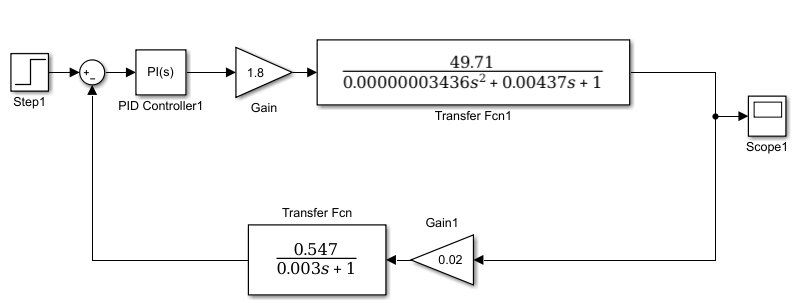
Рисунок 2.10 –Структура управления объектом.
Рассмотрим переходной процесс, полученный в результате моделирования:
Кп = 1.25362085658159, Tиz = 1/202.151964365559=0.00494678.
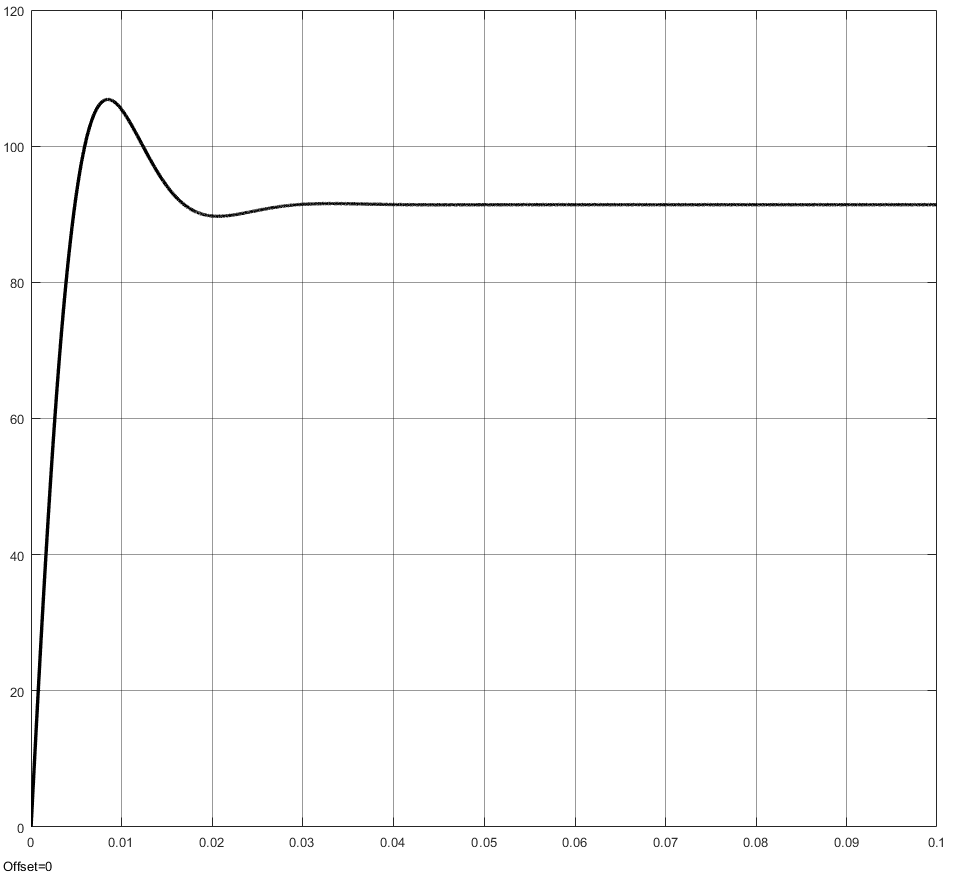
Рисунок 2.11 –Переходной процесс управления двигателем
Перерегулирование менее 20%, т.е все в норме.
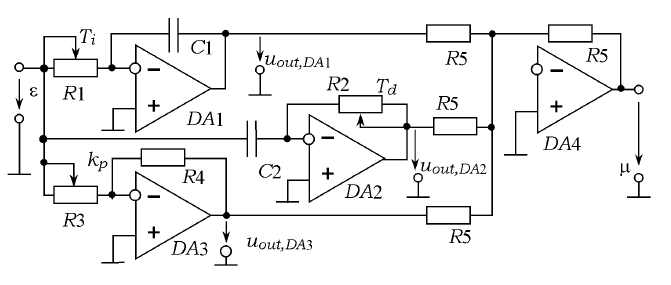
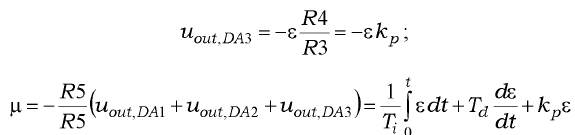
Далее рассчитанные коэффициенты регулятора необходимо реализовать на принципиальной схеме. Данную схему будем реализовывать с помощью операционных усилителей, по параллельно включенной схеме. Пропорциональный коэффициент реализуем на инвертирующем усилителе, а интегральную часть будем реализовывать на интеграторе. Принципиальная схема ПИ-регулятора будет иметь вид:
Рисунок 2.12 –Принципиальная схема ПИ-регулятора с последовательной структурой.
Закон регулирования имеет вид
Принимаем:

Пусть R6 = 100кОм, R5 = 390 кОм.

Пусть R1 = 100кОм, C1 = 47 нФ.
R3=R5=100кОм
2.7 Алгоритм управления индикацией
В цифровых устройствах для индикации параметров, текущего состояния системы и ее компонентов, результатов измерений наиболее часто применяют семисегментные индикаторы, в которых стилизованное изображение цифр составляется семью сегментами.
Свечение сегмента может происходить при подаче на него напряжения логической единицы (индикаторы с общим катодом) или напряжения логического нуля (индикатор с общим анодом).
В зависимости от того, как работает в схеме индикатор (непрерывно или периодически), различают соответственно статический и динамический типы индикации.
В основе той и другой индикации лежит представление двоичного кода двоично-десятичным кодом и последующее преобразование его в последовательность единиц и нулей, обеспечивающих свечение цифры, соответствующей весу двоичного кода. Указанную последовательность принято
называть семисегментным кодом.
При статической индикации счетные импульсы подаются вначале на сумматор на второй вход которого подаются эталонные импульсы, например с кварцевого одновибратора с известным периодом и скважинностию. Далее преобразованный сигнал подается на счетчик, который подсчитывает либо по. фронту или по спаду в течение определенного промежутка времени задаваемого с такого же эталонного кварцевого одновибратора. Обычно при статическом подсчете время подсчета импульсов равняется одной секунде. Со счетчика сигнал подается на дешифратор, который преобразует двоичный код в семисегментный. Также в конце каждого подсчета импульсов сигнал на семисегментные индикаторы подается через регистр-защелку, которая может быть встроена в счетчик либо дешифратор или собрана на логических элементах, которая запоминает количество подсчитанных импульсов за одну секунду и выдает информацию на семисегментный индикатор.
В данной работе попытаемся реализовать схему индикации с использованием кварцевого резонатора (генератора) для отображения частоты вращения вала двигателя на счетчике со встроенным 7-сегментным индикатором серии К4ЭОИГЛ.
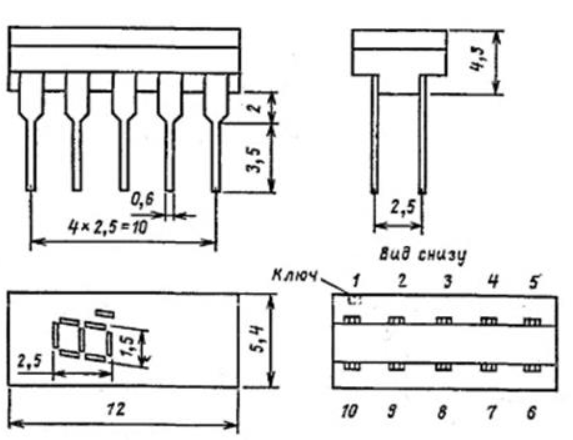
Характеристики счетчика К4ЭОИГЛ:
десятичный счетчик с внутренней дешифрацией сигналов и встроенным 7-сегментным индикатором. Прибор состоит из двух различных кристаллов.
Изготавливается на основе кремниевой Моп-технологии и фосфидоарсенидогаллиевых светодиодных структур. Выпускается в пластмассовом корпусе.
Масса не более 1.5 г.
Установка счетчика в нулевое состояние осуществляется подачей высокого логического уровня на вход R. В счетном режиме на входе R – низкий логический уровень, а на входе Г (гашение) – высокий логический уровень. В счетчике поступление сигнала на индикаторы осуществляются при подаче высокого уровня на R вход, то есть по окончанию счета.
Для преобразования частоты с кварца до частоты равной 0.5 Гц воспользуемся счетчиком серии К176ИЕ5, который имеет вид
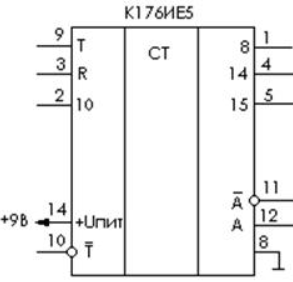
Счетчик работает при входной частоте 16384 или 32768 Гц.
Схема индикации представлена на рисунке
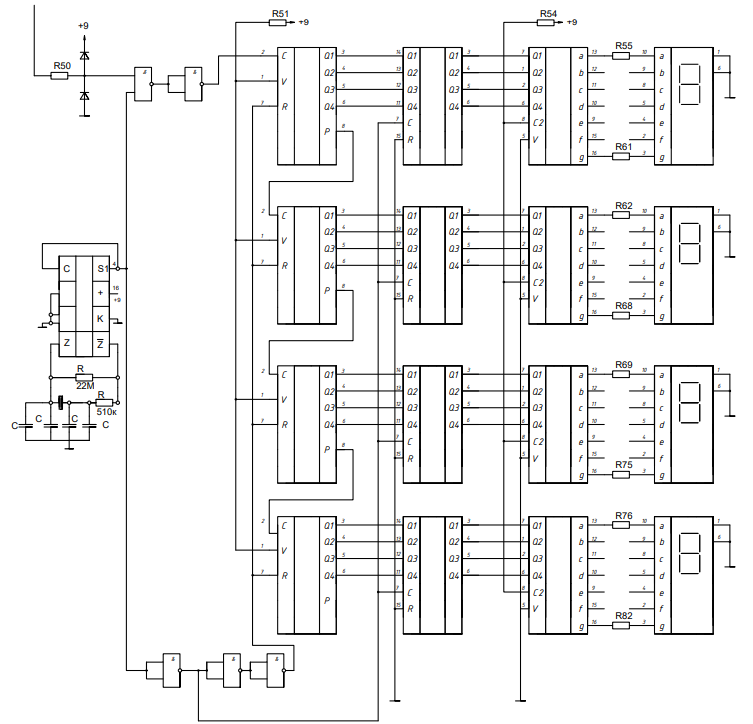
После микросхемы DD5(левой) будет частота
Дальше частота делится на 2 и будет равно 32 Гц
После последнего логического элемента НЕ частота будет соответствовать

Например двигатель крутиться со скоростью 1000 об/мин. Значит частота после триггера Шмитта будет равна. По заданию количество прорезей равно 32.
Период таким образом будет равен
Знаем что период после логического элемента НЕ будет равен
Значит время измерения будет равна половине данного значения, а именно 1.875 с
Таким образом
3. Принципиальная схема блока питания
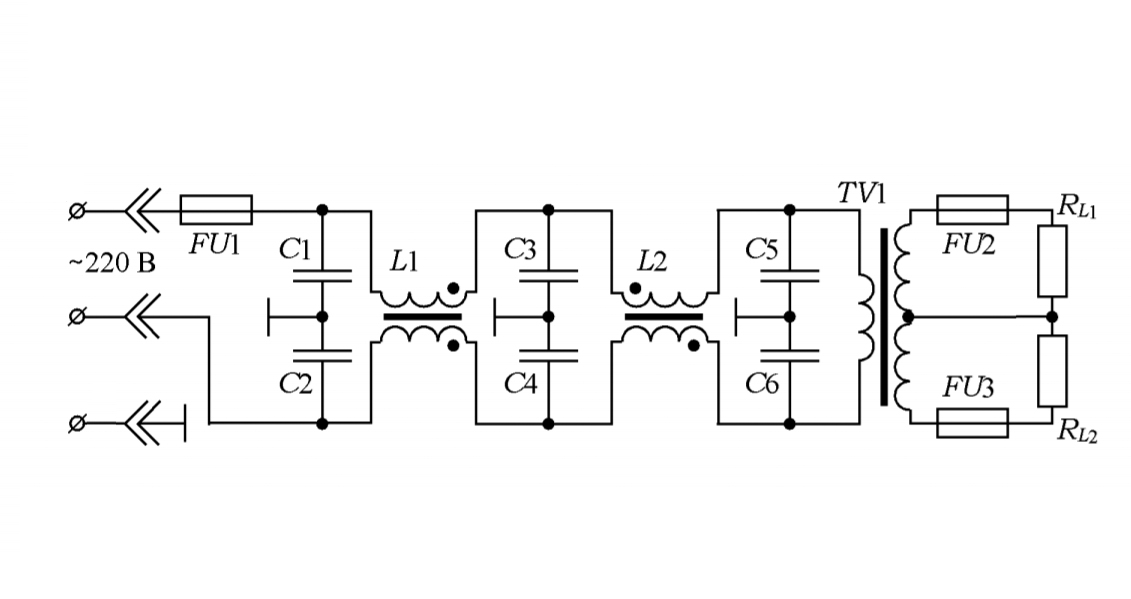
Рисунок 3.1 – Принципиальная схема блока питания
Для данной системы требуется источники питания на: ±9.0В ±9В, ±27В
Для реализации этих источников питания используем интегральные стабилизаторы напряжения: 7812 и 7912
| Тип микросхемы | Напряжение стабилизации, В |
| 7805 | +9 |
| 7905 | -9 |
| 7809 | +9 |
Выберем ОУ LF356N
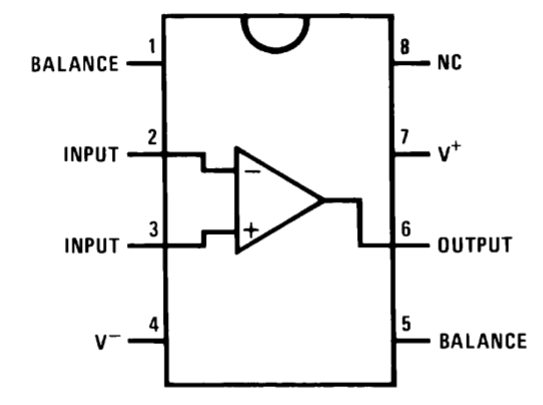
Рисунок 3.2 - ОУ
Напряжение питания ОУ составляет 5мА. В данном курсовом проекте имеется 20 схем с данным ОУ. Ток потребления будет составлять примерно 150мА. На линию + - 5В можно взять конденсатор C = 750 мкФ, С1 на рисунке 3.4. Предохранитель на 0.25 А.
Рисунок 3.3 – Пример отработки выпрямителя и фильтра
Для питания двигателя стабилизаторы не нужны. Предохранитель на линию питания двигателя выбирается исходя пускового тока = 6.97A. Можно взять предохранитель равный 8А. Предохранитель FU1 выбирается по формуле

Таким образом предохранитель 1A.
Пример схемы для питания схем управления.
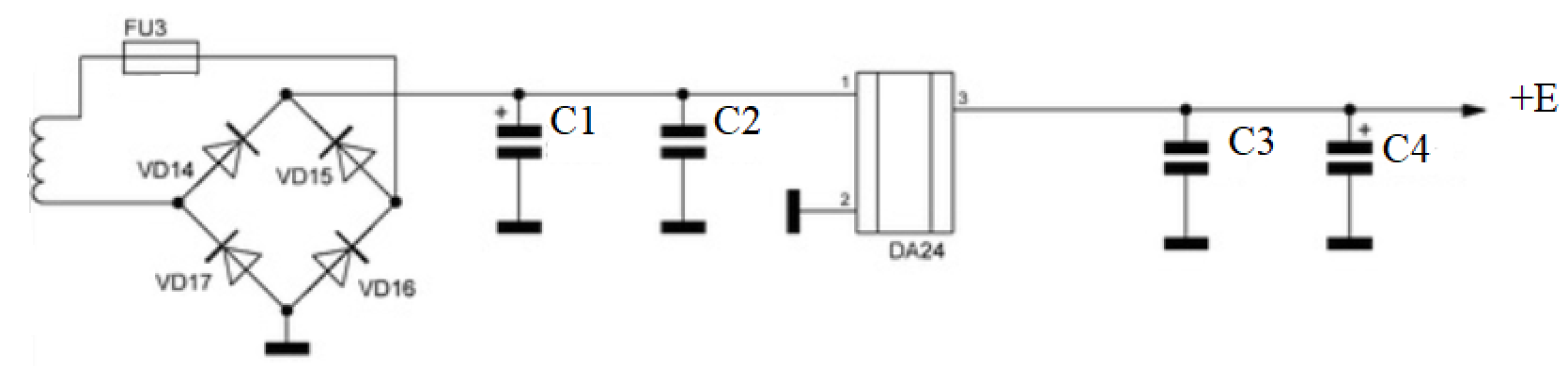
Рисунок 3.4 – Линия питания
В данной схеме С2 = С3 = 0.1 мкФ, а С4 = 200 мкФ.
DA24 на рисунке соответствует микросхеме из таблицы 3.
Так же необходима развязка в питании управляющей части и схемы усиления мощности, поэтому необходимо так же напряжение ±15а и два вида нуля в соответствии с рисунком.
Рисунок 3.5 - Обозначения
 5 Временные диаграммы
5 Временные диаграммы
Сигнал после оптопары:
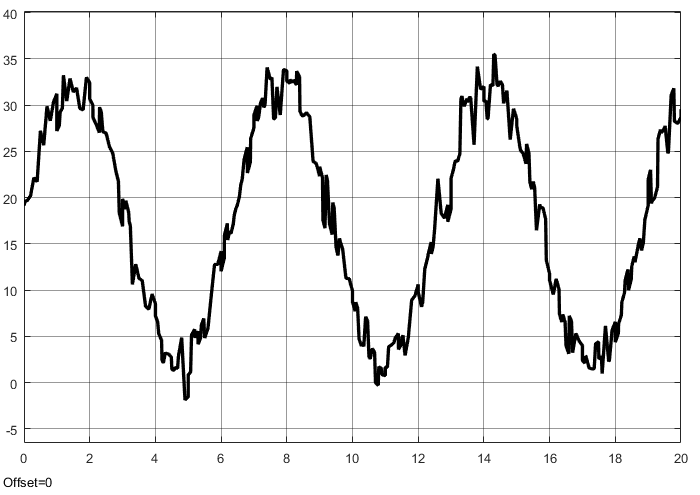
Рисунок 5.1 – Временная диаграмма после оптопары
Сигнал после Триггера Шмитта
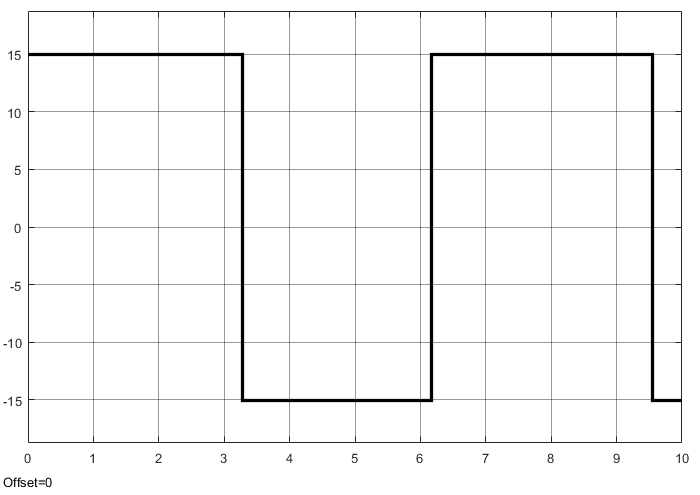
Рисунок 5.2 – Временная диаграмма после триггера
Сигнал после фильтра высокой частоты(ФВЧ)
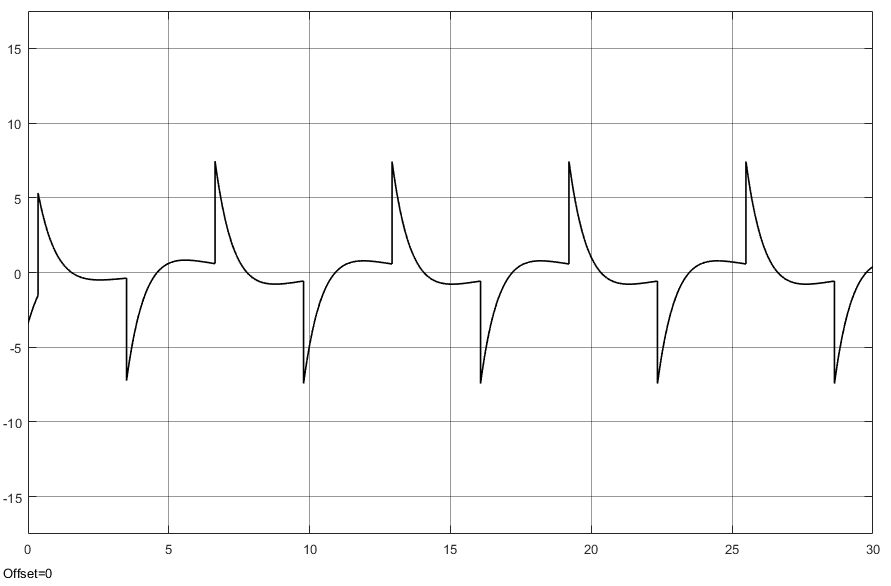
Рисунок 5.3 – Временная диаграмма ФВЧ
Фильтр низких частот (при разных частотах, оборотах двигателя)
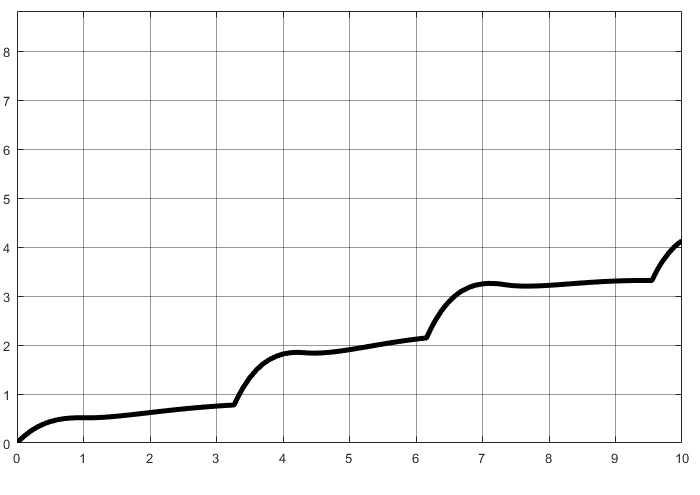
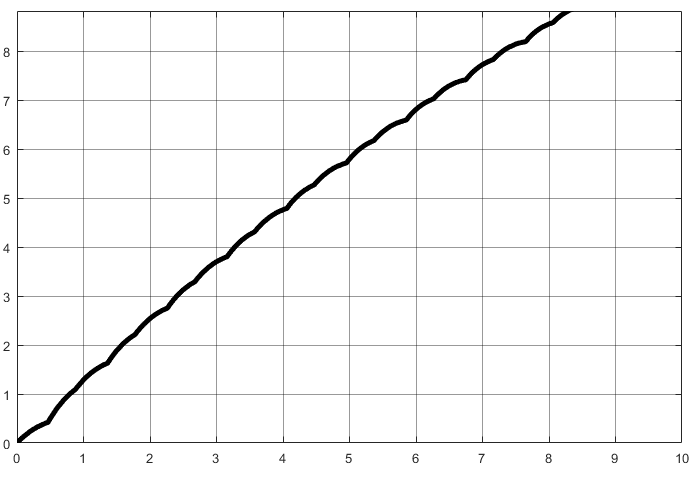
Рисунок 5.4 – Временная диаграмма ФНЧ
Временная диаграмма работы регулятора представлена в разделе 2.
Далее идет формирователь широтно импульсной модуляции(ШИМ) на основе компаратор и генератора пилообразного напряжения (ГПН). Временная диаграмма представлена на
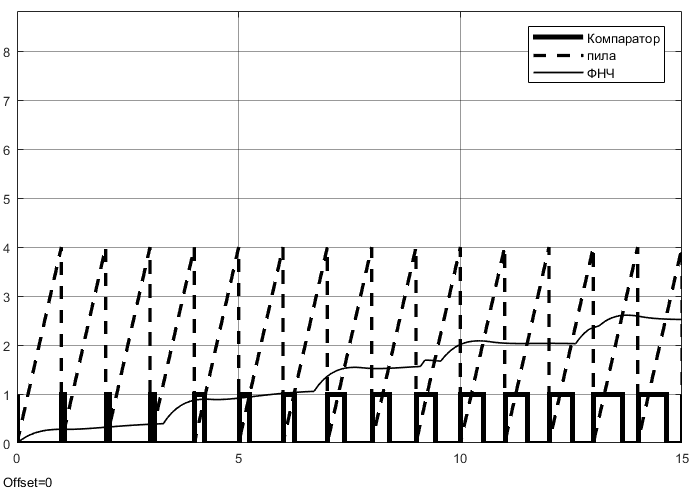
Рисунок 5.6 – Временная диаграмма работы генератора ШИМ
Заключение
 Современный этап развития электронной аппаратуры характеризуется все большим широким применением интегральных микросхем высокой функциональной сложности. В настоящее время невозможно найти какую-либо отрасль промышленности, в которой не использовались бы электронные приборы или электронные устройства измерительной техники, автоматики и вычислительной технике.
Современный этап развития электронной аппаратуры характеризуется все большим широким применением интегральных микросхем высокой функциональной сложности. В настоящее время невозможно найти какую-либо отрасль промышленности, в которой не использовались бы электронные приборы или электронные устройства измерительной техники, автоматики и вычислительной технике.Промышленность выпускает почти все электронные функциональные узлы, необходимые для создания устройств измерительной и вычислительной техники, а также систем автоматики: интегральные электронные усилители электрических сигналов; коммутаторы; логические элементы; перемножители электрических напряжений; триггеры; счетчики импульсов; регистры; сумматоры и т.д. В связи с широким выбором интегральных схем, параметры которых известны из технических условий, изменились задачи стоящие перед разработчиками электронной аппаратуры. Эффективное применение интегральных микросхем, особенно аналогового типа, невозможно без знания принципа их действия и основных параметров.
Можно выделить несколько задач изучения ЭУА в вузе:
освоение студентами принципов работы и закономерностей функционирования полупроводниковых приборов, интегральных микросхем, функциональных узлов и электронной аппаратуры (усилители, компараторы, цифровые микросхемы и т.д.).
приобщение студентов к разработке и созданию функциональных узлов и устройств на современной элементной базе ЭУА, предназначенных для постановки и совершенствования демонстрационного эксперимента и для автоматизации измерений;
ознакомление студентов с современным состоянием и достижением ЭУА как области науки и техники, с методами решения задач, создание перехода от элементарных представлений к основам современной теории, подготовка студентов к самостоятельному изучению научно-технической литературы по ЭУА.
 Список использованной литературы
Список использованной литературы
Оробей И.О Конспект лекций.
Оробей И.О., Гринюк Д.А., Максимов В.Я. Электронныя прылады аутаматыкi. – Минск «БГТУ», 2005
GNL-3012ED – параметры, даташит светодиода – Справочник транзисторов [Электронный ресурс] // URL: https://static.chipdip.ru/lib/773/DOC002773602.pdf
BPW85B - параметры, даташит фототранзистора – Справочник транзисторов [Электронный ресурс] // URL: https://static.chipdip.ru/lib/773/DOC002673602.pdf
detector.rar – Яндекс.Диск [Электронный ресурс] // Яндекс.Диск. URL: https://yadi.sk/d/IrAGqv-amaAFs
К564ЛН2 – параметры, даташиты микросхемы [Электронный ресурс] // URL: https://static.chipdip.ru/lib/031/DOC001031318.pdf
К564ИР6 – параметры, даташиты микросхемы [Электронный ресурс] // URL:
https://static.chipdip.ru/lib/031/DOC001031846.pdf