Реферат Маслакова Е. А
 Скачать 336.32 Kb. Скачать 336.32 Kb.
|

|
Результаты апробации Результаты апробации представлены в виде диаграмм, сформированным по результатам обработки оценок экспертов.  Диаграмма 1. Насколько интересны разработанные материалы? а о ответов; 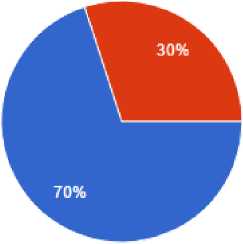 ф очень интересны; ф интересны; ф очень интересны; ф интересны;ф не интересны. Диаграмма 2. Насколько эффективны разработанные материалы для внедрения в образовательный процесс? (10 ответов) 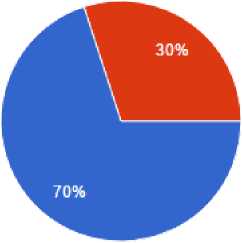 ф эффективны; ф эффективны;ф частично эффективны; ф не эффективны. Диаграмма 3. Соответствуют ли разработанные материалы требованиям ФГОС к формированию УУД? (10 ответов) 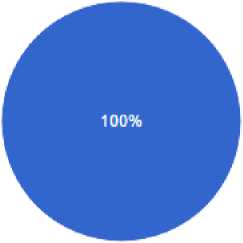 ф постностью соответствуют; ф частично соответствуют; ф не соответствую. ф постностью соответствуют; ф частично соответствуют; ф не соответствую.Диаграмма 4. Стали бы вы использовать разработанные задания в своей педагогической деятельности? (10 ответов) 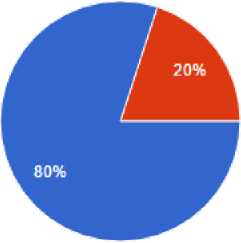 ф использовап(а)бы полностью; ф использовап(а) бы частично: ф не использовал(а)бы. ф использовап(а)бы полностью; ф использовап(а) бы частично: ф не использовал(а)бы.Заключение Обучающиеся должны самостоятельно научиться ставить цели и определять пути их достижения, использовать приобретенный опыт за рамками образовательного процесса - в реальной жизни. В ходе работы был проведен анализ используемых при обучении конструкторов и сред программирования робототехнических устройств. На основе анализа сделан вывод о том, что наборы LEGO MINDSTORMS Education EV3 наиболее адаптированы для внедрения в учебный процесс. А также проведен анализ существующих авторских рабочих программ и выделены основные темы, изучаемые при обучении в курсе робототехники. В практической части исследования разработаны методические рекомендации по использованию сборника задач в рамках кружка по робототехнике. В соответствии с разработанными рекомендациями проработано примерное содержание сборника. Проведена апробация разработанных материалов. По результатам апробации, практическое использование в учебном процессе разработанных материалов будет интересным и эффективным. Исходя из этого, можно сделать вывод о том, что посредством успешного решения задач в ходе исследовательской работы, поставленная цель была достигнута. Библиографический список Пейперт С. Переворот в сознании: дети, компьютеры и плодотворные идеи. - М.: Педагогика, 1989. Федеральный государственный образовательный стандарт основного общего образования // Министерство образования и науки Российской Федерации URL: Ьйр://минобрнауки.рф/документы/543 Шимов И.В. Применение робототехнических устройств в обучении программированию школьников // Педагогическое образование в России. - 2013. - С. 184. К.А.Вегнер Внедрение основ робототехники в современной школе // Вестник Новгородского Государственного Университета. 2013. № №74 Т.2. С. 17-19. LEGO Education. URL:http://education.lego.com/ru-ru. LEGO: больше чем конструктор // Занимательная робототехника URL: http://edurobots.ru/2014/11/lego-bolshe-chem-konstruktor/. Robotics. URL: https:/ru.wikipedia.org/wiki/Robotics Fischertechnik. URL: https://ru.wikipedia.org/wiki/Fischertechnik Филиппов С.А. Робототехника для детей и родителей. - СПб: Наука, 2011. - 263 с. Робототехника в образовании URL: http://Фгос-игра.рф. Открытый урок URL:https://open-lesson.net/1946/. 12.Занимательная робототехника URL:http://edurobots.ru/2014/07/obzor- robototexnicheskix-. 13. Образовательная робототехника URL:http://robot.edu54.ru/constructors- description/222. 1 4. Занимательная робототехника URL:http://edurobots.ru/2016/05/robototexnicheskie-konstr. 15.Образовательная робототехника // URL: http://xn--80aimjldnjj9k.xn-- p 1 ai/index.php/ru/51 -chto-takoe-robototekhnika Робототехника в ДОУ // URL:http://detstvogid.ru/robototehnika-v- dou/.html Роботоконструирование // URL:http://mygenius.ru/legoroboti/ 1 8. Роботошкола // URL: http://www.robotoschool.ru/ RobotC // URL:http: //cxem.net/software/robotc.php HUNA // URL:http: //hunarobo .ru/ Arduino // URL:http: //adne.info/arduino/ VEX // URL:http: //robot.edu5 4 .ru/constructors/3 8 Начало инженерного образования в школе // URL: http://nio.robostem.ru/?page_id=667 Приложение Сборник задач по робототехнике Тема: Линейный алгоритм Задача №1. Написать программу, заставляющую исполнителя обнаружить черную линию. Задача №2. Исполнитель находится в центре окружности. С помощью коротких отрезков окружность разделена на восемь равных частей . Ответить на вопрос - на сколько градусов должен провернуться вал левого двигателя, чтобы исполнитель повернулся вправо на угол в: 45 градусов; 90 градусов; 180 градусов? Провести экспериментальную проверку, написав программы поворота исполнителя на указанные углы и движения робота до каждого отрезка окружности. 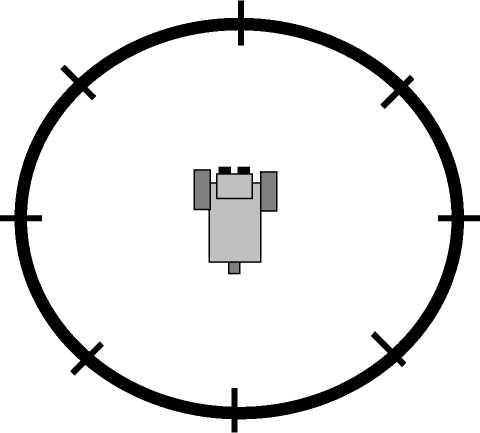 Рисунок 12. Игровое поле - окружность Задача №3. Робот находится в начале отрезка черной линии длиной не менее 60 см. На расстоянии 10, 25, 40 и 60 см от начала отрезка расположены жирные, хорошо заметные черные точки. Ответить на вопрос - на сколько градусов должен повернуться вал левого и правого двигателя, чтобы робот проехал вперед на: а) 10 см б) 25 см в) 40 см г) 60 см? Провести экспериментальную проверку, написав программы движения работа на указанные расстояния. На жирные точки, расположенные на черной линии, устанавливаются флажки. Программы считаются правильными, если робот, начав движение от начала линии, останавливается не далее 2 см от соответствующего флажка. Задача №4. На игровом поле в вершинах воображаемого квадрата стоят флажки, сделанные из деталей LEGO-конструктора. Исполнитель устанавливается учениками самостоятельно, таким образом, чтобы он находился рядом с одним из флажков с внешней стороны квадрата. Написать программу движения робота вдоль периметра квадрата, таким образом, чтобы он обогнул все четыре флажка, не задев их, но и не удаляясь от стороны квадрата более чем на 20 см. Задание считается выполненным, если исполнитель вернулся в начальную точку движения с погрешностью не более 5-10см. Пересечение воображаемой линии соединяющей вершины квадрата считается недопустимым.
u Рисунок 13. Игровое поле - воображаемый кваДрат Задача №5. Игровое поле свободно от посторонних предметов. Написать программу движения робота змейкой. Тема: Алгоритм, содержащий цикл Задача №1. Написать программу движения исполнителя по заданной траектории с одним датчиком света, используя пропорциональное линейное уравнение. Методические рекомендации к заданию: реализуемый алгоритм основывается на том, что возвращаемые датчиком показания градиентно варьируются. Исполнитель сохраняет положение датчика света на границе чёрной линии. Преобразовывая входные данные от датчика света, система управления формирует значение скорости поворота робота. При тренировочном заезде учащиеся увидят, что исполнитель излишне раскачивается и его скорость прохождения траектории очень низкая. На основе опытов учащихся учитель предлагает следующее задание. Задача №2. Написать программу движения исполнителя по заданной траектории с двумя датчиками света, используя пропорциональное линейное уравнение. Задача №3. Напишите программу, которая воспроизводит следующий алгоритм: Робот движется вперед на 10 см. Останавливается Воспроизводит звуковой сигнал. Пятится назад в первоначальную точку. Поворачивает вправо. Повторяет все действия 8 раз. На какой угол должен поворачивать робот вправо, чтобы в конце выполнения программы вернуться в первоначальное положение? Задача №4. Написать программу движения исполнителя по заданной траектории с двумя датчиками света, используя пропорционально-кубический регулятор. Методические рекомендации к заданию: добавив к пропорциональному регулятору кубический, ученики получат изгиб в функции регулятора, что позволит уменьшить раскачивания исполнителя и позволит ему совершать более сильные рывки при удалении от траектории. Задача №5. Написать программу, заставляющую исполнителя с двумя датчиками света двигаться по заданной траектории. Методические рекомендации к заданию: использование двух датчиков света позволяет более чётко разграничить отклонение исполнителя от линии. Задача №6. Составить программу, которая заставит исполнителя двигаться вперед до тех пор, пока инфракрасный датчик не обнаружит, что он находится рядом со стеной или с другим объектом, например, на расстоянии 10см. Задача №7: «В заточении». На белой схеме движения нарисован черный круг. Исполнитель находится в центре круга. Написать программу движения исполнителя внутри черного круга. Исполнитель должен ехать вперед, пока под ним черный цвет и поворачивать вправо, если нет черного цвета. Движение робота должно продолжаться 60 секунд. Программа должна использовать не менее двух циклов. Задача №8.Робот находится на игровом поле. На расстоянии 100 см от него в зоне видимости его радаров находится небольшая картонная коробка. Написать программу движения робота вперед до тех пор, пока расстояние до коробки не уменьшится до 20 см. Совершать повороты роботу не потребуется. Задача №9. На белом игровом поле нарисован черный круг диаметром 60 см. Робот находится в центре круга. Написать программу движения робота внутри черного круга. Робот должен ехать вперед, пока под ним черный цвет и поворачивать вправо, если нет черного цвета. Движение робота должно продолжаться 60 секунд. Программа должна использовать не менее двух циклов. Тема: Алгоритм, содержащий оператор ветвления Задача №1. Написать программу движения исполнителя по черной линии. Робот должен двигаться, отслеживая все ее повороты. 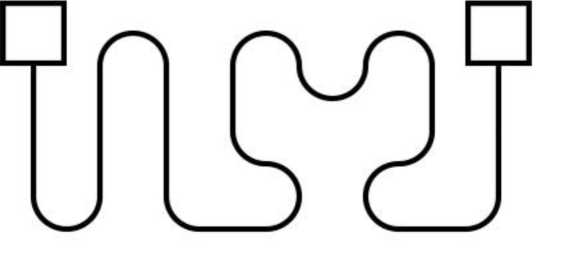 Рисунок 14. Траектория движения для исполнителя Задача №2. Написать программу движения исполнителя по заданной траектории с двумя датчиками света. Методические рекомендации к заданию: усложнение решения одной и той же задачи наглядно продемонстрирует различия между существующими алгоритмическими конструкциями, что поспособствуют эффективному овладению навыками программирования. Для того чтобы учащиеся увидели эффективность использования при решении задач разных алгоритмических конструкций, необходимо усложнить траекторию движения исполнителя. Особенность применения конструкции ветвления для данного задания заключается в следующем: учащимся необходимо провести калибровку датчика одного цвета и определить среднее значение серого В зависимости от показаний датчиков, то есть при отклонении от линии, исполнитель будет корректировать свой курс. 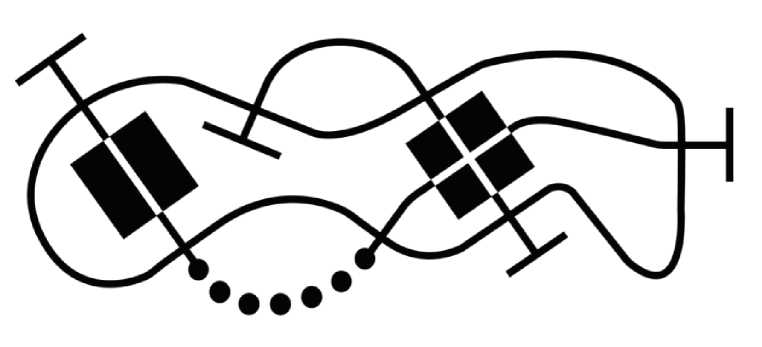 Рисунок 15. Пример сложной траектории для движения исполнителя | ||||||