Реферат Тахогенераторы. Реферат. Тахогенераторы. Реферат по дисциплине Электроприводные системы автомобилей и тракторов на тему Тахогенераторы и область их применения
 Скачать 79.8 Kb. Скачать 79.8 Kb.
|

|
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ Федеральное Государственное Бюджетное Образовательное Учреждение Высшего Образования «Казанский Национальный Исследовательский Технический Университет им. А. Н. Туполева – КАИ» (КНИТУ-КАИ) Институт автоматики и электронного приборостроения Кафедра электрооборудования 13.03.02 Электроэнергетика и электротехника (шифр и наименование направления подготовки (специальности)) Реферат по дисциплине: Электроприводные системы автомобилей и тракторов на тему: «Тахогенераторы и область их применения» Выполнил: Студент гр.3431 Хамитов Расим Рахимзянович Проверил: Новосельский Виктор Петрович Казань 2022 Содержание Введение 1. Тахогенераторы и их назначение 2. Тахогенераторы постоянного тока 3. Тахогенераторы переменного тока Заключение Список литературы ВведениеОсновой для создания электрических машин и трансформаторов явился открытый М. Фарадеем закон электромагнитной индукции. Практическое применение трансформаторов началось в 1876 г., когда русский учёный П.Н. Яблочков впервые применил трансформаторы для питания изобретённых им электрических свечей. Широкому применению электрических машин в промышленности способствовало изобретение русского инженера М.О. Доливо-Добровольского трёхфазного асинхронного двигателя, отличающегося простотой конструкции и высокой надёжностью. Электрические машины малой мощности, применяются в системах и устройствах автоматики и вычислительной техники в качестве функциональных элементов. Все электромашинные элементы автоматики разделяются на три группы: исполнительные двигатели, электромашинные усилители и информационные машины. Исполнительные двигатели осуществляют преобразование электрического сигнала в механическое перемещение, они могут быть асинхронными, постоянного тока и шаговыми. Электромашинные усилители служат для усиления мощности электрических сигналов. Информационными машинами называются устройства, предназначенные для преобразования разного рода не электрических величин в электрические сигналы. Они включают в себя тахогенераторы (применяются для измерения скорости вращения объекта, используются в устройствах электропривода, в транспортных средствах, станкостроении и пр.), сельсины, магнесины и вращающиеся трансформаторы. Эти машины служат для преобразования механических величин (угла поворота, частоты вращения или ускорения) в электрический сигнал или для передачи механического перемещения на расстояние. 1. Тахогенераторы и их назначениеТахогенераторами (ТГ) называются электрические машины небольшой мощности, преобразующие механическое вращение в электрический сигнал. Величина этого напряжения пропорциональна скорости вращения вала тахогенератора. Для съёма этого напряжения традиционно применяется скользящий контакт, включающий графитовые щётки и медный коллектор. Однако образующийся на медной поверхности неравномерный оксидный слой вызывает периодические изменения сопротивления контакта, что приводит к колебаниям напряжения тахогенератора в виде шума. На низких скоростях эти шумы сравнимы с полезным сигналом. Тем не менее, медно-щёточный контакт остаётся популярным, так как имеет большое преимущество – отличные скользящие свойства графита и, как следствие, большой срок службы. Избавиться от проблем при работе тахогенератора в неблагоприятных средах поможет такой тахогенератор, у которого на медную рабочую поверхность коллектора нанесена серебряная дорожка. В этом случае при любых условиях сопротивление контакта щётки и коллектора остаётся низким. Благодаря низкой плотности тока, ширину контакта можно сделать маленькой. Если такие тахогенераторы использовать в сочетании со специальными низко абразивными щётками, то гарантирована устойчивая работа тахогенератора в течении всего срока службы. По роду тока тахогенераторы можно разделить на ТГ переменного и ТГ постоянного тока. 2. Тахогенераторы постоянного токаТахогенераторы постоянного тока выполняют с постоянными магнитами на статоре (рис. 2.1,а) или с электромагнитным возбуждением от независимого источника постоянного тока (рис. 2.1,б). В них используют якорь обычного типа с барабанной обмоткой, а также полый или дисковый с печатной обмоткой, при неизменном токе возбуждения Iв, т.е. при неизменном потоке Ф, ЭДС пропорциональна частоте вращения: Е = сеФп, (1) что является основой для использования машины постоянного тока в качестве тахогенератора. Его выходное напряжение U = Е - IaΣRa= Е - U(ΣRa/Rн), (2) где Rн — сопротивление нагрузки. Из (1) и (2) составим уравнение выходной характеристики тахогенератора:
На рис. 2.2, а сплошными линиями показаны выходные характеристики для различных сопротивлений нагрузки при идеализированных условиях (при Ф = const и ΣRa = const). Эти характеристики являются линейными, а их угол наклона к оси абсцисс уменьшается при снижении сопротивления нагрузки. Следовательно, тахогенераторы можно применять только при неизменной нагрузке, т. е. совместно с индикатором или другим устройством, на который рассчитан данный тахогенератор. Крутизна выходной характеристики современных тахогенераторов постоянного тока S = 3 ÷ 100 мВ/(об/мин) (меньшие значения относятся к тахогенераторам с постоянными магнитами). Наиболее распространены тахогенераторы с номинальной частотой вращения n = 1500 ÷ 3000 об/мин. Погрешности выходной характеристики. Выходная характеристика практически отклоняется от линейного закона в результате размагничивающего действия реакции якоря, наличия нелинейного сопротивления в переходном контакте между коллектором и щётками и изменения тока возбуждения из-за увеличения сопротивления обмотки возбуждения при её нагревании.  Рис. 2.1 Устройство тахогенераторов постоянного тока: 1 — корпус с полюсами; 2 — якорь; 3 — подшипник; 4 — вал; 5 — кожух; 6 — коллектор; 7 — подшипниковый щит; 8 — щётки 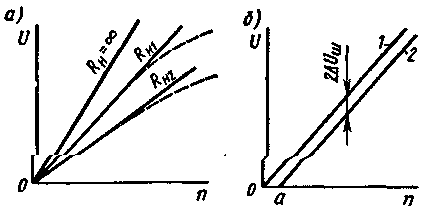 Рис. 2.2 Выходные характеристики тахогенератора постоянного тока и влияние на характеристики падения напряжения под щётками Размагничивающее действие реакции якоря проявляется при возрастании частоты вращения n, так как при этом повышается напряжение U, увеличивается ток Ia тахогенератора, а следовательно, и МДС якоря Fa. Поэтому при повышенных частотах вращения выходное напряжение U возрастает медленнее, чем увеличивается частота вращения (см. штриховые линии на рис. 2.2, а). Чтобы уменьшить влияние размагничивающего действия реакции якоря, в цепи нагрузки желательно иметь максимально большое сопротивление Rн и тахогенератор должен работать при небольших относительных частотах вращения. Нелинейный характер сопротивления щёточного контакта также создает определённую погрешность по сравнению с идеализированной характеристикой 1 (рис. 2.2,б). При этом выходная характеристика 2 остаётся линейной, однако в области малых частот вращения тахогенератор становится нечувствительным к изменению Δп — появляется зона нечувствительности Оа. Для уменьшения погрешности, создаваемой падением напряжения 2Δuщ под парой щёток, в тахогенераторах применяют металлографитовые щётки, у которых величина 2Δuщ незначительна, а в прецезионных тахогенераторах, предназначенных для счётно-решающих устройств, — щётки с серебряными и золотыми напайками. При использовании таких щёток погрешность от влияния величины 2Δuщ практически можно не учитывать. Нагревание обмотки возбуждения тахогенератора приводит к увеличению её сопротивления Rв, вследствие чего уменьшаются ток возбуждения, магнитный поток и выходное напряжение. Чтобы с повышением температуры обмотки возбуждения ток возбуждения изменялся незначительно, последовательно с ней включают либо терморезистор, который стабилизирует сопротивление цепи обмотки возбуждения, либо добавочный резистор с сопротивлением Rдо6 >> Rн, выполненный из материала с малым температурным коэффициентом сопротивления. Кроме того, чтобы уменьшить влияние тока возбуждения на магнитный поток, тахогенераторы часто выполняют с сильно насыщенной магнитной системой. В этом случае даже значительные колебания тока возбуждения весьма слабо отражаются на колебаниях магнитного потока возбуждения (рис. 2.3).  Рис. 2.3 Причины асимметрии выходного напряжения Асимметрия выходного напряжения здесь возникает из-за смещения щёток с геометрической нейтрали. Как известно, при сдвиге щёток с нейтрали, возникает продольная реакция якоря, которая носит намагничивающий характер при одном направлении вращения (рис. 2.3, а) и размагничивающий при другом (рис. 2.3, б). Для устранения этой погрешности надо очень точно устанавливать и надёжно закреплять щёточный узел, не допускать люфтов в щёткодержателях. В тахогенераторах с постоянными магнитами подобной проблемы практически не существует, а изменение сопротивления обмотки якоря приводит к очень небольшим погрешностям. Указанные причины вызывают отклонение выходной характеристики тахогенератора от идеализированной линейной. Относительная скоростная амплитудная погрешность Δu, обусловленная нелинейностью выходной характеристики, обычно устанавливается при номинальной частоте вращения и определяется как отношение (%)
где Uид — выходное напряжение при идеализированных условиях; Uд — действительное значение выходного напряжения. В зависимости от класса точности тахогенератора скоростная амплитудная погрешность при номинальной частоте вращения составляет ±(0,5 — 3)%, а ошибка асимметрии +(1 - 3)%. Пульсация выходного напряжения является специфической погрешностью тахогенератора постоянного тока. Различают зубцовые, якорные и коллекторные пульсации. Зубцовые пульсации обуславливаются зубчатым строением якоря, что приводит к периодическому изменению проводимости воздушного зазора. С целью устранения зубцовых пульсаций выполняют скос пазов, выбирают такую ширину полюсного наконечника, в пределах которой укладывается целое число зубцовых делений. Иногда применяют магнитные клинья. Якорные пульсации обуславливаются неравномерным воздушным зазором, неодинаковой магнитной проводимостью вдоль и поперёк проката. Для ослабления этой причины выполняют относительно большой зазор, по высокому классу точности обрабатывают посадочные поверхности, применяют высококачественные подшипники, выполняют веерообразную шихтовку сердечника якоря. Коллекторные пульсации возникают из-за конечного числа коллекторных пластин, неплотного прилегания щёток, вибраций щёточного узла. Для их устранения выполняют максимально возможное число коллекторных пластин, тщательно подбирают ширину щёток, улучшают качество изготовления щёткодержателей, коллектора и т.д. Достоинствами тахогенераторов постоянного тока являются: малые габариты и масса при большой выходной мощности; отсутствие фазовой погрешности, что обусловлено работой на активную нагрузку; кроме того, в тахогенераторах с постоянными магнитами не требуется иметь вспомогательный источник электрической энергии для возбуждения. Однако по сравнению с тахогенераторами переменного тока они имеют ряд недостатков: сложность конструкции, высокую стоимость, нестабильность выходной характеристики из-за наличия скользящего контакта; пульсации выходного напряжения и радиопомехи, возникающие в результате коммутации тока щётками. 3. Тахогенераторы переменного токаТахогенераторы переменного тока (асинхронные, синхронные) применяют с выходом на постоянном токе через полупроводниковый выпрямитель. Синхронный тахогенератор представляет синхронную машину малой мощности. Возбуждение его осуществляется от постоянного магнита расположенного на роторе. Выходные обмотки выполнены по однофазной или трёхфазной схемам и расположены на статоре. Отсутствие щёточного контакта обеспечивает высокую надёжность работы. Недостаток синхронных тахогенераторов – зависимость частоты выходного напряжения от скорости вращения. Синхронный тахогенератор (СТГ) является простейшим тахогенератором переменного тока. Конструктивно он подобен однофазному синхронному генератору небольшой мощности с ротором в виде постоянного магнита-звёздочки (рис. 3.1).  Рис. 3.1 Синхронный тахогенератор При вращении ротора в обмотке статора индуцируется ЭДС, действующее значение которой пропорционально частоте вращения n: Главный недостаток СТГ заключается в том, что одновременно с изменением угловой скорости вращения ротора n изменяется частота тока в статоре f, изменяется индуктивное сопротивление (x = 2pfL) как самого тахогенератора, так и нагрузки, на которую он работает. Это приводит к искажению выходной характеристики СТГ, к появлению значительных амплитудных и фазовых погрешностей. Синхронные тахогенераторы в системах автоматики применяются редко. Их в основном используют для измерения частот вращения различных машин и механизмов, подключая к вольтметрам со шкалой, отградуированной в об/мин. Основное достоинство СТГ - простота конструкции и высокая надежность в работе.  Рис. 3.2 Устройство асинхронного тахогенератора У асинхронных тахогенераторов частота выходного напряжения не зависит от скорости вращения. Статор асинхронного тахогенератора имеет две обмотки, расположенных под углом  Рис. 3.3 Тахогенератор и эмиттерный повторитель тахогенератор электропривод постоянный ток Чтобы сгладить пульсации выпрямленной ЭДС с тахогенератора переменного тока, на выходе его устанавливают фильтр, представляющий собой обычное апериодическое звено. Существенные амплитудные и фазные искажения в выходное напряжение может вносить сопротивление нагрузки. Поэтому на практике обычно используют тахогенератор в режиме, близко к холостому ходу. Для его реализации тахогенератор соединяют с нагрузкой через эмиттерный повторитель, обладающий высоким входным сопротивлением (рис. 3.3). В пределах рабочего участка зависимость ЭДС тахогенератора от его скорости может быть принята линейной. Тогда Недостатками асинхронных тахогенераторов являются небольшая выходная мощность и ограничение полосы пропускания частоты питающего напряжения. По сравнению с тахогенераторами постоянного тока асинхронный обладает меньшим передаточным коэффициентом. ЗаключениеВ данной работе были рассмотрены принципы и назначения устройства, при вращении вала которого на его выходе вырабатывается электрическое напряжение - тахогенератор, которое применяются в системах и устройствах автоматики и вычислительной техники в качестве функциональных элементов. Все электромашинные элементы автоматики разделяются на три группы: исполнительные двигатели, электромашинные усилители и информационные машины. Информационные машины (измерительными преобразователями (ИП) называются устройства, предназначенные для преобразования разного рода не электрических величин в электрические сигналы), включают в себя тахогенераторы (применяются для измерения скорости вращения объекта, используются в устройствах электропривода, в транспортных средствах, станкостроении и пр.) Список литературыЛекции Новосельского В.Г. по дисциплине «Электроприводные системы автомобилей и тракторов» Лекции Новосельского В.Г. по дисциплине «Системы электроснабжения автомобилей, тракторов и автопредприятий» Армейский Е.В. Электрические машины. М., 1985. Брускин Д.Э., Зорохович А.Е., Хвостов В. С. Электрические машины и микромашины. М., 1981. Кацман М.М. Электрические машины. М., 2000. Кацман М.М., Юферов Ф.М. Электрические машины автоматических устройств. М., 1980. Копылов И.П., Горяинов Ф.М., Клоков Б.К. Проектирование электрических машин. М., 1980. |