измерительные преобразователи. самостоятельная работа 28-7. Реферат по теме " Электромагнитные измерительные преобразователи " Дисциплина Физические основы получения информации
 Скачать 254.72 Kb. Скачать 254.72 Kb.
|

|
Министерство образования и науки Российской Федерации Российский государственный университет нефти и газа (Национальный исследовательский университет) имени И. М. Губкина Кафедра информационно-измерительных систем РЕФЕРАТ По теме: “Электромагнитные измерительные преобразователи” Дисциплина «Физические основы получения информации» Студент группы АИ-19-02 Астратенко Алина Дата выполнения работы: Дата защиты работы: Преподаватель: Дадаян Юрий Аршавирович Москва, 2021 Для измерения линейных перемещений широкое применение получили электромагнитные преобразователи, представляющие собой один или несколько контуров, находящихся в магнитном поле, которое может быть создано как токами, так и внешним источником. Электромагнитный преобразователь представляет собой один или несколько контуров, находящихся в магнитном поле, которое может быть создано как токами, протекающими по контурам, так и внешним источником. Разновидности электромагнитных измерительных преобразователей.Электромагнитные преобразователи можно подразделить на четыре группы: индуктивные На рисунке 1а) изображен наиболее распространенный преобразователь с малым воздушным зазором б, который изменяется под действием измеряемой величины Р. Рабочее перемещение в преобразователях с переменным зазором составляет 0,01-10 мм. 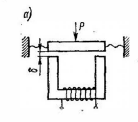 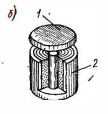 Рисунок 1а – индуктивный преобразователь Рисунок 1б – ферритовый элемент В этих преобразователях могут быть использованы ферритовые элементы, изображенные на рисунке 1б, выпускаемые промышленностью; для изготовления подвижного сердечника 1 используется основание такого же элемента 2, стенки которого сошлифовываются. На рисунке 1в изображен преобразователь с разомкнутой магнитной цепью. Он представляет собой катушку 1, внутри которой помещен стальной сердечник 2. Перемещение сердечника вызывает изменение индуктивности. Этот тип преобразователя применяется для измерения значительных перемещений сердечника (10-100 мм). 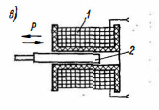 Рисунок 1в - преобразователь с разомкнутой магнитной цепью Одним из основных достоинств индуктивных преобразователей является возможность получения большой мощности преобразователя (до 1-5 В•А), что позволяет пользоваться сравнительно малочувствительным указателем на выходе измерительной петли и реrистрировать измеряемую переменную величину самописцем или вибратором осциллографа без предварительного усиления. Лишь при малогабаритных преобразователях приходится прибегать к включению усилителя. взаимоиндуктивные (трансформаторные); На рисунке 2а показан дифференциальный трансформаторный преобразователь с подвижным сердечником. Как видно из сравнения рисунков 1а и 2а, конструкции магнитной цепи индуктивного и взаимоиндуктивноrо преобразователей одинаковы. 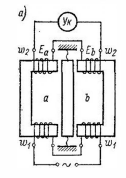 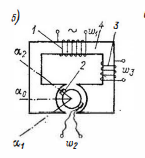 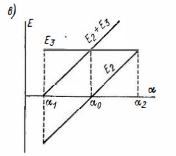 Рисунок 2а – Рисунок 2б – преобразователь Рисунок 2в – зависимость Е от угла поворота угла отклонения взаимоиндуктивный рамки преобразователь На рисунке 2б показан преобразователь угла поворота. Напряжение питания подводится к обмотке 1. Обмотка 2 в этом преобразователе выполнена в виде рамки, имеющей возможность поворачиваться в кольцевом зазоре магнитной цепи 4. При крайних положениях рамки (а1 и а2) индуктированная в ней ЭДС Е2 имеет максимальное значение. По мере поворота рамки в горизонтальное положение ЭДС Е2 линейно уменьшается до нуля (рисунок 2в). При переходе рамки через горизонтальное положение фаза ЭДС Е2 изменяется на 180°. В тех случаях, когда хотят получить изменение ЭДС преобразователя от нуля до максимума при повороте рамки из одного крайнего положения α1 в другое α2, последовательно с рамкой включают дополнительную обмотку 3. Зависимость ЭДС Е2, Е3 и (Е2 + Е1) от угла отклонения рамки приведена на рисунке 2в. Преобразователи подобного типа можно применять для измерения больших угловых перемещений, и конструктивно для этих целей можно использовать измерительные механизмы ферродинамических приборов. Поэтому и сами преобразователи иногда называют ферродинамическими. Преобразователь, представленный на рисунке 3а с распределенными магнитными параметрами предназначен для измерения больших линейных перемещений и состоит из магнитопровода 4 с рабочей частью в виде двух параллельных полос, обмотки возбуждения 1 и подвижной обмотки 2. При перемещении обмотки 2 от положения 8 до положения 5 индуктированная в обмотке 2 ЭДС возрастает, причем зависимость приращения ЭДС от перемещения обмотки 2 оказывается практически линейной, если магнитное сопротивление участка 3-5 магнитопровода мало по сравнению с магнитным сопротивлением зазора. 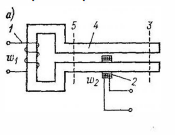 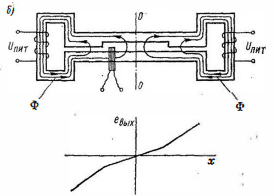 Рисунок 3а – преобразователь с Рисунок 3б – профилированный распределенными магнитными магнитопровод параметрами Преобразователи подобного типа относительно просто выполнить и с требуемой функциональной зависимостью, применив для этого профилированный магнитопровод, показанный на рисунке 3б. Неподвижные обмотки преобразователя соединены так, чтобы их потоки в магнитопроводе были направлены встречно. Тогда в положении 0-0 ЭДС подвижной обмотки будет равна нулю. При смещении обмотки вправо или влево от нейтрали в ней наводится ЭДС, фаза которой отличается на 180 градусов. индукционные; Индукционные преобразователи основаны на использовании явления электромагнитной индукции. Согласно закону электромагнитной индукции, ЭДС в контуре определяется формулой е = -dΨ/dt, где Ψ - потокосцепление с контуром. Таким образом, выходной величиной индукционного преобразователя является ЭДС, а входной - скорость изменения потокосцепления. В общем случае индукционный преобразователь представляет собой катушку с сердечником, которая характеризуется некоторым обобщенным параметром Υ и ЭДС, в которой может индуктироваться как в результате изменения во времени внешнего магнитного поля, так и в результате изменения во времени параметра Υ преобразователя. Если преобразователь находится в однородном магнитном поле с индукцией В, то в его обмотке, имеющей w витков, наводится ЭДС Индукционные преобразователи широко применяются для измерения параметров магнитных полей, частоты вращения, параметров вибрации и сейсмических колебаний, расхода жидких веществ. Для измерения магнитной индукции переменного магнитного поля применяются преобразователи со стационарными (неподвижными) обмотками. Для измерения индукции постоянного магнитного поля могут быть использованы как преобразователи с условно стационарной обмоткой, так и преобразователи с принудительным движением обмотки. В преобразователях со стационарной обмоткой изменение магнитного потока, сцепляющегося с витками обмотки, может происходить в результате изменения самого измеряемого поля, например, при измерениях магнитного поля, вызываемого включением какого-то агрегата, или в результате однократного изменения положения самого преобразователя - удаления преобразователя из магнитного поля ила поворота в поле на 90 или 180°. Для измерения напряженности магнитного поля при испытании ферромагнитных материалов используются плоские измерительные катушки, показанные на рисунке 4а, помещаемые на поверхности испытуемого образца; при этом измеренная в воздухе напряженность поля принимается равной напряженности поля на поверхности образца. 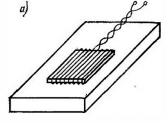 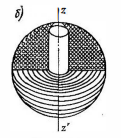 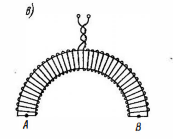 Рисунок 4а – плоская Рисунок 4б – шаровой Рисунок 4в - магнитный измерительная индукционный потенциалометр катушка преобразователь Для измерения магнитной индукции и напряженности неоднородных магнитных полей целесообразно использовать шаровые индукционные преобразователи, показанные на рисунке 4б. Для измерения МДС используются индукционные преобразователи, называемые магнитными потенциалометрами, обычно выполняемые в виде равномерной обмотки на гибком изоляционном каркасе. Обмотка выполняется с четным числом слоев так, чтобы выводы находились в середине обмотки, как показано на рисунке 4в. Для измерения частоты вращения используются α- и N-преобразователи. Конструктивно они отличаются от преобразователей магнитной индукции тем, что дополняются устройством (обычно постоянный магнит), создающим магнитное поле с заданной индукцией, а вращение подвижных элементов осуществляется объектом, частота вращения которого измеряется. На рисунке 5 показано принципиальное устройство тахогенератора. 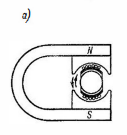 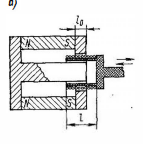 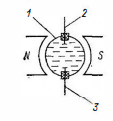 Рисунок 5 – тахогенератор Рисунок 6 – преобразователь Рисунок 7 - параметров вибрации индукционный преобразователь расходомера Для получения значения виброперемещения или виброускорения используется преобразователь параметров вибрации, показанный на рисунке 6; выходной сигнал подается соответственно на интегрирующий или дифференцирующий усилитель. Принцип действия индукционного преобразователя расходомера показан на рисунке 7. В потоке жидкости, движущейся в трубопроводе 1 из немагнитного материала между полюсами магнита, возникает ЭДС, значение которой пропорционально скорости движения потока: е = BDv, где В - магнитная индукция; D - диаметр трубы; v - скорость движения жидкости. Эта ЭДС снимается с помощью электродов 2 и 3, изолированных от трубопровода. магнитоупругие; Принцип действия магнитоупругих преобразователей основан на изменении магнитной проницаемости µ ферромагнитных тел в зависимости от возникающих в них механических напряжений (магнитоупругий эффект), обусловленных воздействием на ферромагнитные тела механических сил Р (растягивающие, сжимающие, изгибающие, скручивающие). Изменение магнитной проницаемости ∆µ/ µ для различных материалов составляет 0,5-3% при изменении σ на 1 МПа. Типы магнитоупругих преобразователей можно разбить на две основные группы. К первой группе относятся преобразователи, в которых используются изменения магнитной проницаемости чувствительного элемента в одном направлении; магнитный поток в них направлен в большей части магнитной цепи вдоль линии действия усилия. В преобразователях этой группы под действием, измеряемой силы изменяется индуктивность, обмотки (рисунок 8а) или индуктивность между обмотками (рисунок 8б). 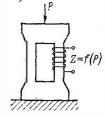 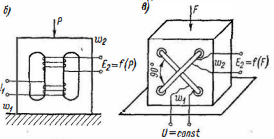 Рисунок 8а - Рисунок 8б - Рисунок 8в - изменение изменение изменение индуктивности индуктивности магнитной обмотки между обмотками проницаемости Ко второй группе относятся преобразователи, в которых используется изменение магнитной проницаемости одновременно в двух взаимно перпендикулярных направлениях или, иначе говоря, магнитная анизотропия материала чувствительного элемента. В этих преобразователях магнитный поток направлен под углом 45° к линии действия измеряемого усилия (рисунок 8в). Магнитоупругие датчики применяются для измерения сил, давлений, крутящих моментов. Мощность, развиваемая датчиком, как правило, достаточна для непосредственного включения указателя без предварительного усиления. Датчик обладает высокой надежностью, так как не имеет подвижной части, перемещающейся под действием входной величины. Ответы на вопросы.Чем различаются индуктивные и взаимоиндуктивные преобразователи? Индуктивный преобразователь представляет собой катушку индуктивности, а трансформаторный — катушку взаимоиндуктивности, параметры которой изменяются под воздействием входной величины. Конструкции этих преобразователей одинаковы. Почему исследуемый преобразователь относится к числу дифференциально-трансформаторных? В основу действия рассматриваемого преобразователя положены: зависимость изменение электрических величин от положения сердечника; изменение индуктивностей обмоток; изменение М под действием перемещения сердечника – по определению, такой преобразователь является преобразователем дифференциально-трансформаторного типа. Поясните причину возникновения минимума взаимной индуктивности в среднем положении сердечника. При строго симметричном положении сердечника в середине трансформатора, ЭДС на выходе вторичной обмотки будет равна нулю из-за взаимной компенсации ЭДС, наводимых в каждой половине этой обмотки. Следовательно, этому положению сердечника в идеальном случае соответствует нулевое значение коэффициента взаимной индукции М. Почему взаимная индуктивность стремится к нулю при сильно выдвинутом сердечнике? Сильное смещение сердечника приведет к большому увеличению разности ЭДС в половинах вторичной обмотки, то есть к большому увеличению М. Чем отличается реальный взаимоиндуктивный преобразователь от идеального? Идеальный преобразователь отличается тем, что: характеристика материала сердечника нелинейная и обладает гистерезисом; в трансформаторе существуют вихревые токи, протекающие в сердечнике, защитной трубке и сечениях проводов обмоток; обе половины обмоток и сердечника не являются строго одинаковыми. Какие допущения делаются при описании и исследовании реального преобразователя? Полагается, что сердечник рассматриваемого преобразователя относится к категории сердечников с очень большим воздушным зазором, в которых индукция далека от индукции насыщения, а материал, из которого сделан сердечник, магнитомягкий и обладает малым гистерезисом. Что такое комплексная взаимная индуктивность? Комплексная величина, равная отношению комплексного напряжения U2 к произведению комплексного тока I1 на ωj  Что такое взаимозаменяемый преобразователь? Преобразователи, удовлетворяющие техническим условиям, при установке в реальные измерительные системы, обеспечивающие без дополнительной регулировки и подгонки установленный класс точности этих систем (если и остальные части системы удовлетворяют необходимым для этого условиям). Где располагается рабочая часть преобразователя? Рабочая часть – вблизи центрального положения сердечника, область максимальной чувствительности преобразователя. Почему практически взаимная индуктивность нигде не обращается в нуль? Потому что в реальном преобразователе нельзя добиться строгой симметрии положения сердечника и половин обмоток. А даже при небольшом смещении сердечника от центра будет возникать разность ЭДС, и взаимная индуктивность не будет равна нулю. В какой области происходит резкое изменение фазы выходного напряжения преобразователя? При смещении сердечника вправо от среднего положения угол становится более 90 градусов. Почему при определении характеристик преобразователя червячную передачу следует вращать только в одном направлении? При вращении следует следить, чтобы при вращении по часовой стрелке указателя был исключен люфт, имеющийся в червячном механизме. Нельзя допускать поворотов червячной передачи против часовой стрелки, так как из-за люфта это спутает все координаты сердечника. Как определяется угол сдвига фаз между током и напряжением в первичной обмотке? Для одного положения сердечника в рабочей области измеряют ток I1 и Uвх, для этого измеряется величина вектора I1Rlll, из которой определяют I1, затем устанвливают напряжение U1= I1Rlll и измеряют напряжение U12. Искомый фазовый сдвиг опредляют по формуле:  I1, Uвх – векторы тока и напряжений на первичной обмотке Как определяют угол сдвига фаз между входным и выходным напряжением преобразователя? Производят измерение U2 – выходное напряжение. Далее, измеряется напряжение U, вектор которого параллелен заданному вектору входного напряжения Uвх.  |