|
|
1 Регуляторы пневмоавтоматики системы ПР3 21. Регуляторы пневмоавтоматики системы Старт
Регуляторы пневмоавтоматики системы «Старт»
Регулятор пневматический ПР3.21
Регулятор пневматический ПР3.21
Регулятор построен на элементах УСЭППА – универсальная система элементов промышленной пневмоавтоматики. Регуляторы строятся по элементному принципу.
Элементы ПА – унифицированные функциональные устройства дискретного или непрерывного действия, каждое из которых выполняет одну функцию.
В систему входят:
Пневмокнопки;
Пневмотумблеры;
Пневмореле;
Пневмоэлемент сравнения;
Дроссель;
Пневмоемкость;
Повторители-усилители;
Задатчики;
На элементах УСЭППА могут собираться генераторы импульсов, триггеры, сумматоры, интегрирующие цепи, дифференциаторы, приборы, выполняющие математические операции, регуляторы и машины, которые определяют и оптимальные точки ТП и поддерживают ее.
Основной элемент – сопло-заслонка.
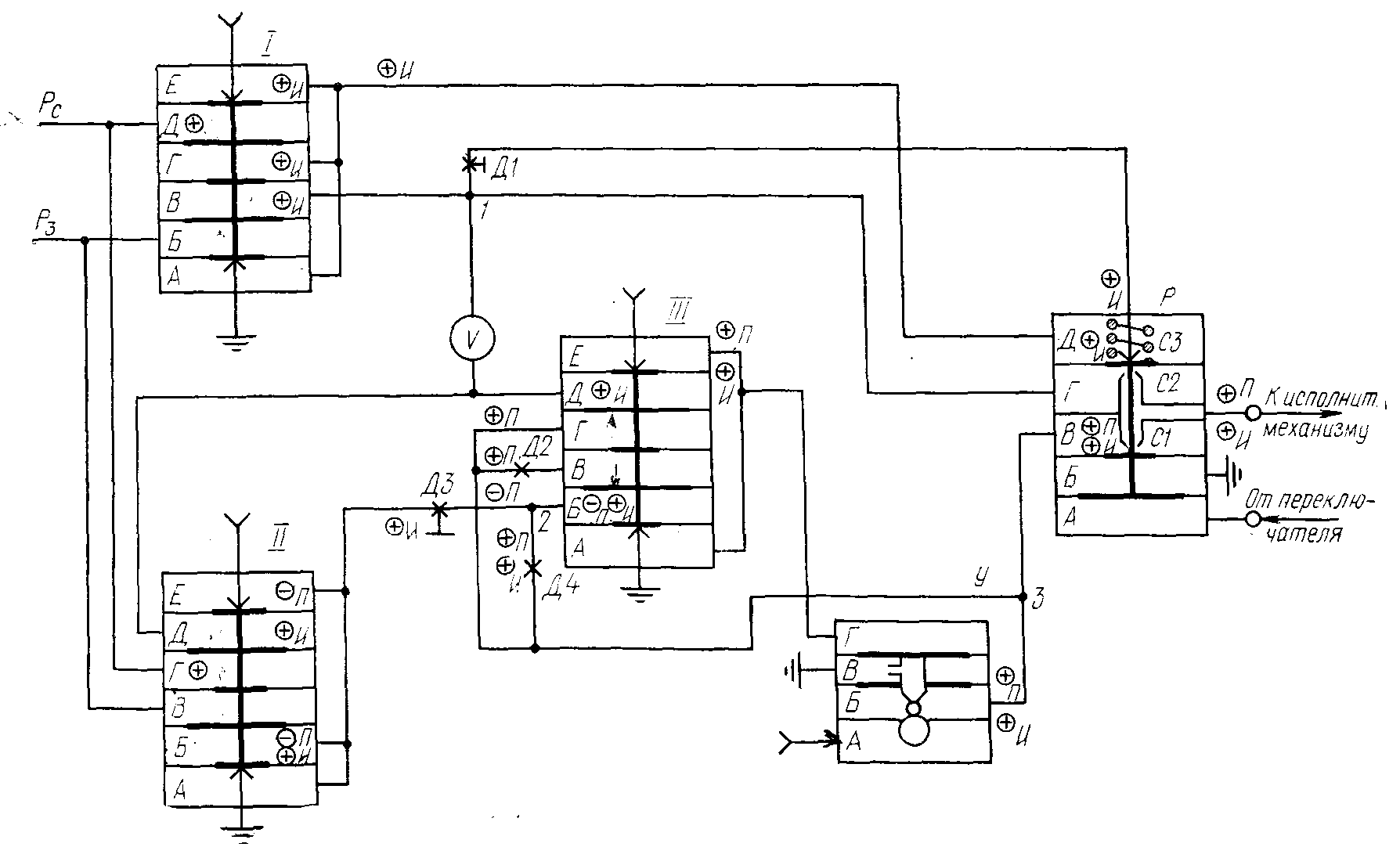
Регулятор ПР3.21 – предназначен для получения непрерывного регулирующего воздействия на исполнительный механизм с целью поддержания контролируемого параметра на заданном уровне. Регулятор отрабатывает ПИ-закон регулирования. ПР3.21 может работать с первичными и вторичными преобразователями, задатчиками со стандартным пневматическим сигналом 0,2 – 1 кгс/см2 ((19,6 – 98 кПа).
Состав ПР3.21:
Три пятимембранных элемента сравнения 1,11,Ш.
Пневмоусилитель У;
Трехклапанное пневмореле Р;
Дроссели Д;
Пневматическая емкость V.
Элементы сравнения: Резинотканевые мембраны соединены жестким стержнем. В камерах А и Е имеется сопло-заслонка. В камеру Е подается воздух от источника питания, а камера А через сопло соединяется с атмосферой. При ходе стержня вниз сопло в камере А прикрывается, а в камере Е отходит от сопла. В выходную линию подается больше воздуха, а в атмосферу уходит меньше. Давление на выходе повышается.
Усилитель: При подаче сигнала в камеру Г резинотканевая мембрана прогибается вниз, надавливая соплом на малый шарик, который перемещает большой шариковый клапан, открывая ход из камеры А в камеру Б. В камеру А подается Рпит. Воздух проходит через ШК в камеру Б и оттуда в импульсную линию.
Если Р в к. Г ослабнет, то мембрана прогнется вверх, ШК перекроет отверстие из к. А в к. Б и в то же время малый шарик откроет вход воздуха в сопло. Через сопло излишний воздух попадет в к. В, а оттуда в атмосферу. Т.О. в импульсной линии создается такое же давление, как в к. Б. Количество воздуха в импульсной линии У больше, чем от ЭС. У производит усиление сигнала по мощности.
Реле Р : служит для переключения сх. регулятора с А на Р управление.
В А-режиме в к.А воздух не подается. Под действием пружины к.Д жесткий стержень оттянут вниз. Сопло в к. Д свободно, сопло С2 в к.Г закрыто заслонкой, являющейся общей для к Д и Г. Сопло С1 в к.В свободно и воздух от У мощности через С1 попадает в линию ИМ.
Работа схемы в А режиме:
ЭС II отрабатывает П-закон, ЭС 1 – И – составляющую ПИ-закона.
П-составляющая ПИ-закона регулирования:
Предположим, Д1 закрыт. Воздух от ЭС 1 (Е) через сопло С3 (реле Р) не может попадать в т.1 и в импульсную линию Д (ЭС III). Т.о., ЭС1 будет отключен.
Давление сигнала Рс = Рз, мембраны ЭСII и III находятся в равновесии и на ИМ существует определенное неменяющееся Рим.
Пусть Рс Рз, тогда в к. Г (ЭСII) давление возрастет, что обозначено (+П).
Равновесие мембранного механизма ЭСII будет нарушено. Под действием Рс жесткий стержень пойдет вверх. Сопло в к. Е будет прикрываться, в результате давление в камере начнет падать, что обозначено (-П)
С индексом П (пропорционально). Если бы в элементе не было ООС, сопло в камере Е в конце концов было бы перекрыто полностью, но камера Е связана импульсными трубками с камерами А и Б.
Т.к. давление в импульсной линии на выходе из камеры Е понизилось, то оно понизилось и в к. Б (- П). Следовательно, давление на мембрану в камере Б упало, что скомпенсировало повышение давления в к. Г.
Уменьшение давления на выходе ЭСII передается по импульсной линии через дроссель Д3 в камеру Б ЭСIII. Жесткий стержень ЭСIII пойдет вниз, что вызовет увеличение давления в к. Е ЭСIII и к. Г Усилителя. У. На выходе У в т.3 появится усиленный по мощности сигнал повышенного давления. Этот сигнал через Д4 попадет в т. 2 и к. Б ЭСIII.
Т.о., ослабление поступающего на вход ЭСIII сигнала будет частично скомпенсировано + по давлению сигналом ООС выхода усилителя мощности У. Подвижные системы ЭСII и ЭСIII пришли в равновесие при новом состоянии входных и выходных сигналов.
Усиленный по мощности сигнал У из т. 3 попадает в к. В реле Р (+П), а оттуда через сопло С1 к ИМ. Все звенья прохождения сигнала в ЭСII и ЭСIII охвачены жесткой ОС, поэтому команда, поступающая к ИМ, пропорциональна входному сигналу на ЭСII .
Из к. Г и В (ЭСIII) подается усиленный по мощности выходной сигнал. Этот сигнал является ПОС (к. В) и ООС (к.Г). Это сделано для устранения автоколебаний, могущих возникнуть в системе. Автоколебания, возникающие впри нарушении равновесия, затормаживаются с помощью постоянного дросселя Д2, включенного в линию ПОС (к.В).
Коэффициент пропорциональности регулятора изменяется дросселем Д3.
И-составляющая ПИ-закона регулирования
Дроссель Д1 открыт.
давление Рс, попадая в камеру Д ЭС!, выводит из равновесия мембранно-стержневую часть элемента. Мембрана в к. Д прогибается вниз, из сопла в к. Е начинает истекать количество воздуха и давление в камере возрастает (+И) . ОС на элементе осуществляется подачей сигнала в к.Г Импульс повышенного давления из к. Е ЭС1 попадает в к. Д реле Р, а оттуда через сопло С3 в импульсную линию и через Д1 в т. 1. Из точки 1 импульс повышенного направляется в камеру В и через емкость V, создающую задержку во времени, подается в камеру Д (ЭС111). Т.о., осуществляется ПОС в системе, обеспечивающая И-составляющую ПИ-закона.
Вместе с тем увеличенный по давлению импульс передается в камеру Д элемента ЭСII. Это сделано в связи с тем, что ПОС на ЭСIII вызовет возрастание давления не только в линии ИМ, но и в т. 2, следовательно и в к. Б элемента ЭСII.
ЭСII, являясь чисто П-частью, не должен реагировать на ПОС И-части. Возросшее давление в к. Д компенсирует возросшее давление в к. Б элемента ЭСII.
Переменное сопротивление дросселя Д1 позволяет регулировать величину ПОС за счет времени интегрирования.
Проверка элементов пневмоавтоматики
Элемент сравнения проверяется на герметичность, определяется зона возврата и основная погрешность при включении элемента по схеме сравнения; основная погрешность – при работе в режимах реализации алгебраических операций.
1. Герметичность проверяется подачей воздуха под Р= 160 кПа во все глухие камеры элемента и смачиванием мест соединения мыльным раствором. Герметичность мембран проверяется поочередной подачей воздуха под Р=100 кПа в камеры элемента: при этом не должно быть утечек воздуха из камер, расположенных с обеих сторон от проверяемой камеры.
При негерметичности элемента или какой - либо из мембран, необходимо разобрать элемент, очистить (протереть) его от грязи, масла и металлической пыли; заменить негерметичную мембрану и негодные резиновые уплотнительные кольца. После сборки элемент равномерно стягивают 4-мя крепежными винтами и снова проверяют.
2 Е С2
Д
Г
В
Б
А С1
            . Проверка зоны возврата и основной погрешности элемента в режиме сравнения 2-х сигналов производится по схеме рис.5.7 а.: . Проверка зоны возврата и основной погрешности элемента в режиме сравнения 2-х сигналов производится по схеме рис.5.7 а.:
 
Рвых
Р 1 Р 2
В камере В устанавливают постоянное давление Р2 поочередно 20, 40, 60, 80, 100 кПа. Затем при каждом значении давления Р2 плавно изменяют в обе стороны переменное давление Р1 на мин значение, которое вызывает появление на выходе дискретных сигналов 0 или 1 (0 – Р= 0-7 кПа, 1 – от 110 кПА до Рпит).
Если зона возврата превышает указанные допуски, то его необходимо настроить. Настройка производится перемещением сопл С1 и С2 регулировочными винтами. Зона возврата регулируется изменением значения рабочего зазора между соплами С1 и С2 и торцами жесткого центра мембранного блока – заслонками. Чем меньше рабочий зазор, тем меньше зона возврата и наоборот. Рабочий зазор между С1 и С2 и жестким центром мембранного блока равен 0,05 – 0,1 мм. Все действия проводят очень осторожно. Элемент, настроенный по схеме сравнения, маркируется знаком . Если элемент не настроен, то необходимо поменять местами «питание» и «сброс».
3. Проверка погрешности.
Проводится в режиме повторения входного сигнала, рис.5.7,б
В камере Д устанавливают Р1 = 20, 40, 60, 80, 100 кПа и определяют Рвых.
Погрешность повторения определяют как разность:
Рвых - Р1 =
Погрешность не должна превышать 0,5 кПа. Подрегулировку производят двумя соплами: если одно отворачивают, то другое заворачивают и наоборот.
Если погрешность +, то винт С1 нужно вывернуть, а С2 – ввернуть, если -, то наоборот. Элемент, настроенный по схеме повторения маркируют «=».
Исполнительные механизмы электрических регуляторов
По принципу действия ЭИМ подразделяются на электромагнитные (соленоидные) и электродвигательные.
Электромагнитные ИМ – это электромагниты большой мощности, преобразующие электрический сигнал в перемещение регулирующего органа. При наличии напряжения в электромагните РО находится в одном крайнем положении, при отсутствии напряжения – в другом. Электромагнит часто объединен с РО. Соленоидные ИМ применяются в двухпозиционных регуляторах с РО небольших размеров.
Чаще применяются электродвигательные ИМ.
Состав ИМ: электродвигатель; редуктор, служащий для преобразования скорости вращения вала двигателя в угол поворота выходного вала ИМ; устройство для сочленения привода с РО; дополнительные устройства, обеспечивающие остановку ИМ в крайних положениях (концевые выключатели), самоторможение при отключении двигателя; возможность ручного перемещения РО при неполадках в работе регулятора; обратная связь по положению РО; контроль положения РО.
Электродвигательные ИМ м.б.: неуправляемые (включение с помощью муфт) и управляемые : контактные и бесконтактные.
В ИМ с контактным управлением – включающий элемент – реле, контакторы;
В ИМ с бесконтактным управлением – используют исполнительные усилители (ПБР). Бесконтактные схемы управления обладают высокой надежностью, и позволяют получать как постоянную, так и переменную частоту вращения вала двигателя. Чаще ИМ однооборотные – рассчитаны на вращательное движение выходного вала в пределах 360о – одного оборота.
В комплекте с регулирующими приборами в основном работают МЭО – однооборотный, бесконтактный, с постоянной частотой вращения выходного вала.
МЭО состоит из однофазного асинхронного конденсаторного двигателя с полым ротором, редуктора и двух индукционных датчиков, один из которых служит для контроля положения РО, другой – для введения жесткой ОС по положению РО. Каждый из датчиков состоит из двух одинаковых катушек, включаемых по дифференциальной схеме, что позволяет использовать их в качестве жесткой ОС П-регулятора.
Выходной вал ИМ соединяется с РО при помощи кривошипа, насаженного на конец вала и тяги. Механизм снабжен маховиком ручного управления. Для ограничения предельных положений выходного вала и предохранения РО от поломок ИМ снабжен двумя настраиваемыми механическими упорами с упругими демпферами (на угол в диапазоне 45-270о). Наличие червячного зацепления обеспечивает его самоторможение при отключении питания ЭД. Схема рис. 87.
Одна из обмоток ЭД питается через фазосдвигающий конденсатор С, а другая – от исполнительного усилителя (ПБР) Выпрямитель питает катушку электромагнитного тормоза.
Тормоз состоит из тормозного шкива, насаженного на вал двигателя, тормозной колодки, прижимаемой к шкиву пружиной и электромагнита.
При отсутствии сигнала на входе ИМ колодка поджата к шкиву. При появлении сигнала механизм растормаживается.
Основной параметр ИМ:
крутящий момент на выходном валу (от 16 до 10 000 Нм); нужный крутящий момент обеспечивается выбором необходимой мощности ЭД, передаточного отношения редуктора и КПД механизма. От крутящего момента зависят габариты и масса ИМ;
время одного оборота выходного вала, характеризующее скорость перемещения ИМ-ом РО. Время одного оборота определяется частотой вращения ЭД и передаточным отношением редуктора (40 – 630 с).
Максимальный угол поворота МЭО определяется конструкцией датчика положения и сигналом ОС, зависит от применяемого датчика.
МЭО-250/63-0,25 – механизм исполнительный электрический однооборотный с номинальным моментом на выходном валу 250 Нм с временем полного хода выходного вала 63 с, полный ход выходного вала 0,25 оборота. Работает в комплекте с ПБР-2.
|
|
|
 Скачать 98.5 Kb.
Скачать 98.5 Kb.