Электропривод продольнострогательного станка. Пояснительная записка. Рис. 1, и удовлетворяющего следующим условиям Исходные данные конструктивнотехнологических параметров
 Скачать 0.99 Mb. Скачать 0.99 Mb.
|

|
Нагрузочная диаграмма и тахограмма электропривода приведены на Рис. 4. 5.Проверка выбранного двигателя по нагреванию и перегрузке Проверку двигателя по нагреву проводим по методу эквивалентного тока для двигателя, имеющего независимую вентиляцию:  (5.44 [4]) (5.44 [4])Итак, двигатель загружен на 6.Анализ динамических свойств электромеханического преобразователя, как объекта управления. Анализ соотношения механических и электрических постоянных времени Модуль жесткости статической характеристики в разомкнутой системе определяется выражением:  , (4.7 [4]) , (4.7 [4])где Электромагнитная постоянная времени вычисляется по формуле: где где Электромеханическая постоянная времени вычисляется по формуле: Отношение постоянных времени электропривода, определяющее колебательность электропривода: Переходный процесс колебательный. Частота колебаний переходного процесса: Вещественная составляющая корней: Время достижения максимума:  . .Скорость холостого хода (задания) двигателя, при которой обеспечивается максимально допустимый момент, определяется выражением:  . .Структурная схема электромеханической линеаризованной модели приведена на рис. 5. График переходного процесса 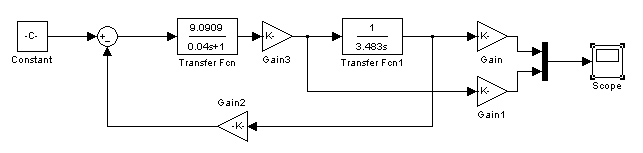 Рис. 5. Структурная схема электромеханической линеаризованной модели 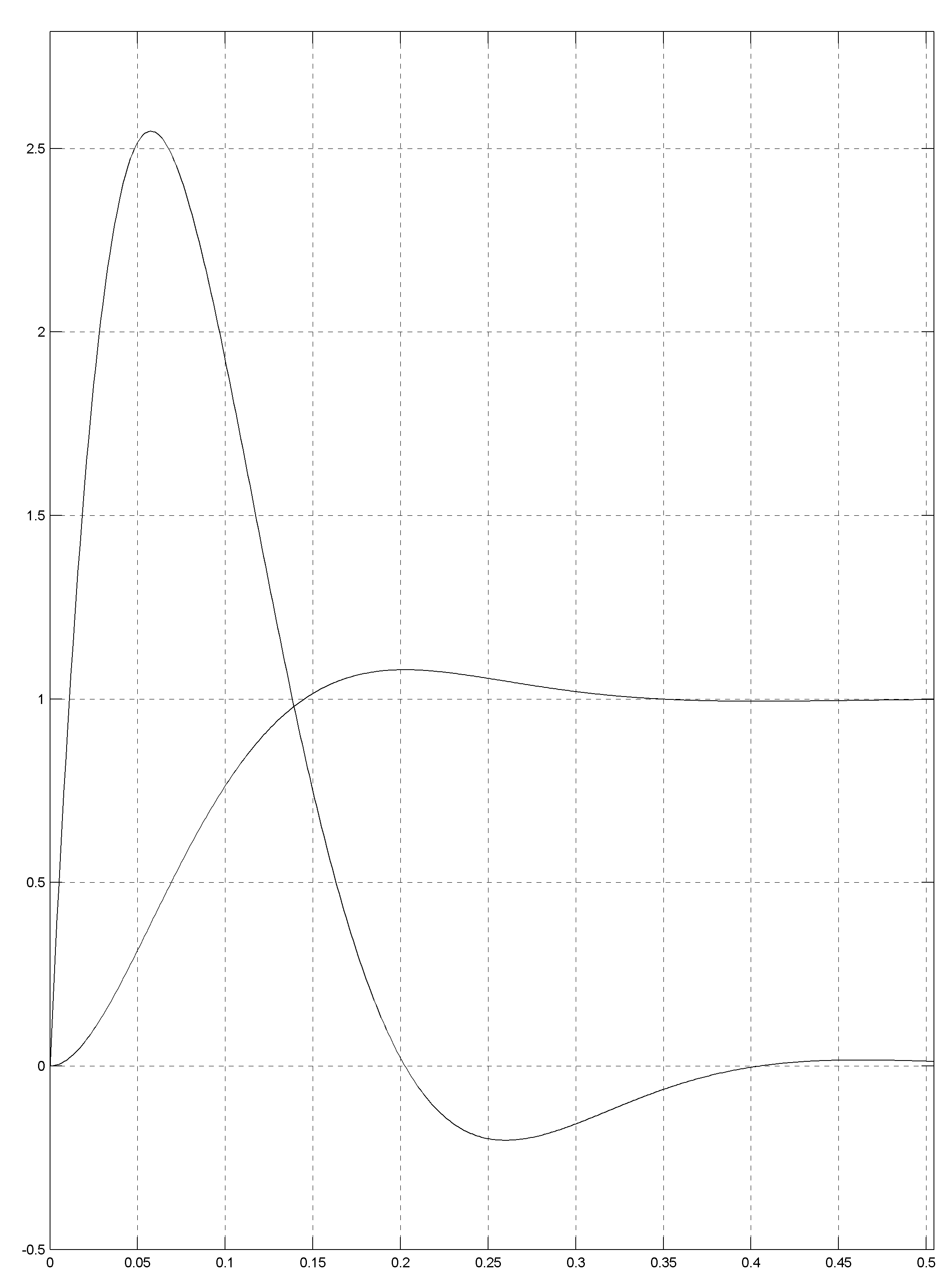 Рис. 6. График переходного процесса при ступенчатом задании скорости 7.Выбор параметров силовой части электропривода и системы управления силовым преобразователем энергии. Схема силовых цепей выпрямительно-инверторного преобразователя должна обеспечивать выполнение требований, предъявляемых к электроприводу, при минимальном количестве управляемых вентилей и высоких технико-экономических показателях, поэтому мы выбираем комплектный тиристорный электропривод Выбирается пульсность схемы исходя из мощности привода. Выбираем пульсность • силовая часть с трёхфазной мостовой схемой выпрямления и встечно-параллельным соединением тиристоров для реверсивных КТЭ; • система управления тиристорами; • система автоматического регулирования; • система защиты, сигнализации и управления электропривода; • устройство питания электромагнита механического тормоза; • устройство питания обмотки возбуждения двигателя; • устройство питания обмотки возбуждения тахогенератора; • устройство динамического торможения (включая резисторы динамического торможения); • силовые сетевые реакторы; • сглаживающие или токоограничивающие реакторы в цепи выпрямленного тока; • силовая коммутационная и защитная аппаратура в цепях переменного и постоянного тока. Выбираем номинальный выпрямленный ток преобразователя из стандартного ряда. Этот ток должен превышать номинальный ток двигателя: Принимаем По каталогам выбираем Тиристорные комплектные электроприводы серии КТЭУ являются регулируемыми электроприводами постоянного тока, в которых преобразование напряжение переменного тока постоянной амплитуды и частоты в выпрямленное напряжение регулируемой величины осуществляется с помощью тиристорных преобразователей. Кроме тиристорного преобразователя КТЭУ включает в себя дополнительные элементы, узлы и устройства, обеспечивающие работу электропривода как функционально законченного устройства во всех требуемых режимах и осуществляющие автоматическое регулирование таких координат, как ток якоря, его поток возбуждения, частота вращения, положение и т.д. ТЭУ включает в себя следующие функциональные узлы: • силовая часть тиристорного преобразователя; • силовой питающий трансформатор; • коммутационная защитная аппаратура на стороне как переменного, так и постоянного тока; • система импульсно-фазового управления тиристорами; •система защит преобразователя; • оперативная коммутационная аппаратура на стороне постоянного тока (рубильник иди разъединитель, контакторы линейный и динамического торможения); • резисторы динамического торможения (если оно есть); • сглаживающий реактор в цепи постоянного тока (для КТЭУ при Iном > 800 А); • управляемый тиристорный возбудитель для питания обмоток возбуждения; • система автоматического регулирования (САР) координат электропривода; • систему логического управления и защит электропривода, включающую сигнализацию срабатывания защит; • блок возбуждения тахогенератора (при необходимости); • электроизмерительные приборы. В КТЭУ используется трехфазная мостовая схема без последовательного соединения тиристоров. Функциональная схема электропривода КТЭУ изображена на рис.8. Преобразователь выбираем по номинальному току IN = 230 А и напряжению UN = 230 В. Номинальные данные КТЭУ: Iном = 250 А; Uном = 230 В; однодвигательный; реверсивный; питание через силовой трансформатор от сети 380 В [1]. Выполняем расчет механических характеристик. Вначале рассчитываем внешние характеристики системы ТП-Д EЯ = f(IЯ) для нескольких значений угла управления. В первую очередь находим приближенную границу (полагая RЯЦ = 0) между зонами прерывистого и непрерывного тока. Координаты границ [2]  , ,где Задаемся значениями угла управления: α = 15, 60, 90, 120, 150 °. В режиме прерывистого тока в начале находим минимальную ЭДС якоря при IЯ = 0 и при больших углах управления [2]  . .Затем, задаваясь рядом значений угла проводимости λ в пределах от одного шага расчета до , вычисляют [2]  , , , ,где  , , В режиме непрерывного тока внешние характеристики являются прямыми линиями [2] EЯ = Ed(α) – RЭIЯ – ΔUЩ – ΔUТ , где ΔUЩ – падение напряжения в щетках двигателя; ΔUТ – прямое падение напряжения на открытых тиристорах; RЭ – эквивалентное активное сопротивление цепи якоря [2] Внешние характеристики в определенном масштабе совпадают с механическими характеристиками ω = f(M), для этого введем необходимый коэффициент – произведение постоянной двигателя на его магнитный поток Тогда угловая скорость и момент двигателя находятся через его ток и ЭДС  , ,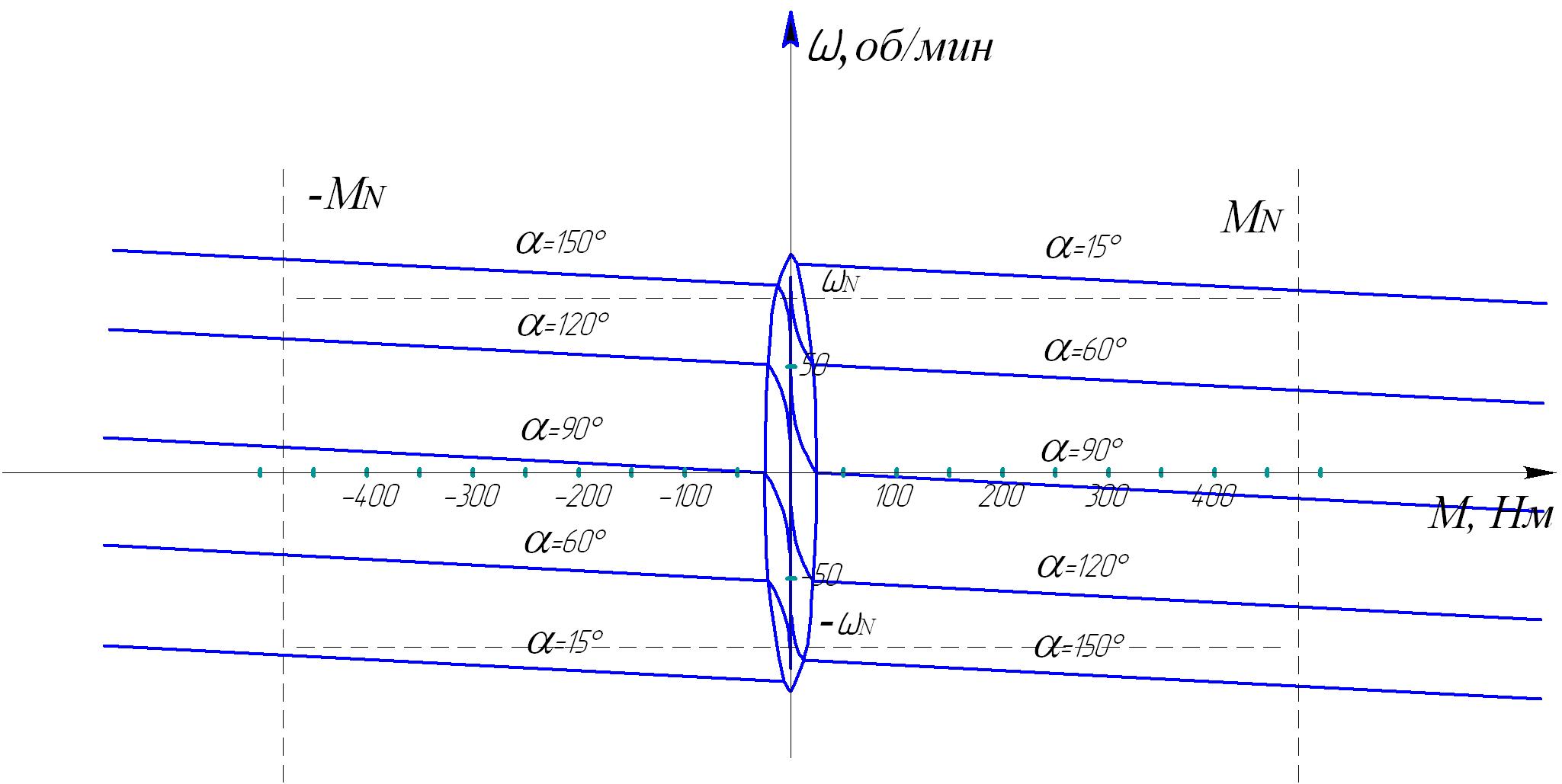 Рис. 9. Механические характеристики 8.Расчеты по энергетике электропривода (расчет потерь за цикл работы, энергии, потребляемой из сети, среднециклового КПД и т.д.) Номинальный КПД двигателя определяются по формуле: Переменные потери в номинальном режиме имеют вид: Условно постоянные потери двигателя: Коэффициент отношения потерь имеет вид: Коэффициент переменных потерь для каждого участка нагрузочной диаграммы имеет общий вид: Тогда потери на любом из участков определяются так: Активная энергия, потреблённая двигателем на каждом из участков:  . .Суммарная энергия, потреблённая за цикл, вычисляется по формуле:  . .Среднецикловой КПД имеет вид:  . .Таблица 2. Значения времени переменных потерь активная энергия, потреблённая двигателем
Заключение В курсовом проекте рассчитан электропривод механизма главного привода продольно-строгального станка. В качестве двигателя выбран двигатель постоянного тока с независимым возбуждением Двигатель проверен по нагреву методом эквивалентного тока и перегрузке. В качестве преобразователя напряжения двигателя выбран промышленный реверсивный тиристорный преобразователь типа КТЭУ с номинальным выпрямленным током Рассчитано значение энергии потерь и активная энергия, потребляемая двигателем из сети за цикл. При заданной тахограмме двигатель работает со среднецикловым КПД равным 0,832. Библиографический список. 1) Теория Электропривода: Методические указания и типовые задания к проекту /И.Я.Браславский, В.И.Лихошерст, В.П.Метельков, Е.Ф.Тетяев. Свердловск: УПИ, 1991. 36 с. 2) Проектирование электрических машин: Учеб. для вузов /И.П.Копылов, Б.К.Клоков, В.П.Морозкин, Б.Ф.Токарев; Под ред. И.П.Копылова. – 3-е изд.,испр. и доп. – М.: Высш.шк., 2002. – 757 с.:ил. 3) Вольдек А.И. Электрические машины. Учебник для студентов высш. техн. учебн. заведений. – 3-е изд., перераб. – Л.: Энергия, 1978. – 832 с., ил. 4) Ключев В.И. Теория электропривода: Учеб. для вузов. – 2-е изд. перераб. и доп. – М.: Энергоатомиздат, 1998. – 704 с., ил. 5) Справочные данные по элементам электропривода: Методические указания к курсовому проекту по дисциплине “Теория электропривода” / И.Я.Браславский, А.М.Зюзёв, В.И.Лихошерст, В.П.Метельков, С.И.Шилин. Екатеринбург: УГТУ, 1995. 56 с. 6) Редукторы. Справочное пособие. Изд. 2-е , доп. и перераб. Краузе Г.Н., Кутилин Н.Д., Сычко С.А. Л., “Машиностроение”, 1972 г. 144 стр., 206 табл., 82 ил. 7) Справочное пособие. |