ДКР Электропривод вентильный двигатель. ДКР Електропривод _Перегуда О.В._ОЕ-81docx. Розрахунок і вибір енергозберігаючого електропривода з вентильним двигуном
 Скачать 1.13 Mb. Скачать 1.13 Mb.
|

|
Міністерство освіти і науки України Національний технічний університет України «Київський політехнічний інститут імені Ігоря Сікорського» Інститут енергозбереження та енергоменеджменту Кафедра електропостачання ДОМАШНЯ РОЗРАХУНКОВА РОБОТА на тему «Розрахунок і вибір енергозберігаючого електропривода з вентильним двигуном» З дисципліни: «Електропривод» Варіант № 5-1 Виконала: Київ 2021  Вступ ВступДвигуни постійного і змінного струмів постійно удосконалюються для забезпечення потреб промисловості. Двигуни постійного струму здатні задовольнити усі потреби промисловості, але вони мають комутаційні обмеження по максимальній частоті обертання, що залежить від потужності. Тому тепер розвиваються високошвидкісні безупинні установки. Двигуни змінного струму не мають недоліків по максимальній частоті обертання, і деякі режими забезпечують навіть краще, ніж двигуни постійного струму. Так, синхронні двигуни можуть дати більш ефективне динамічне гальмування в одну сторону з невеликим початковим ударним моментом і дозволяють одержувати плавний безступінчастий пуск. Відомо також, що двигуни змінного струму володіють істотними економічними перевагами: більш дешеві, надійні і не потребуючі дорогих з відносно низьким КПД установок. Завдяки цим перевагам двигуни змінного струму одержали широке поширення в промисловості в тих випадках, коли особливості двигунів постійного струму не потрібні чи мало відчутні. Недоліком двигунів змінного струму в порівнянні з двигунами постійного струму є неможливість одержання низьких і підвищених стійких частот обертання.  ЗАВДАННЯ ЗАВДАННЯВихідні дані для розрахунку Таблиця 1.1
Таблиця 1.2
Кінематична схема механізму зображена на рис. 1.1 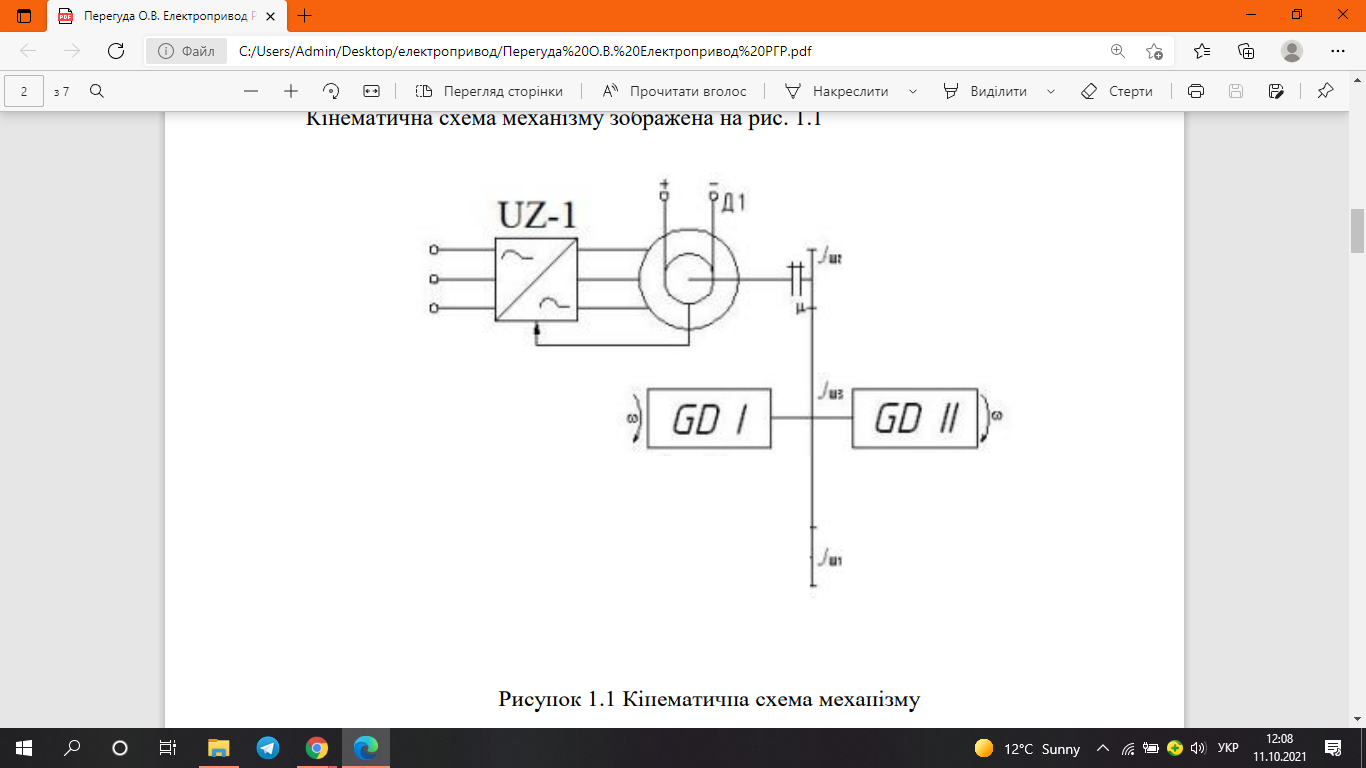 Рисунок 1.1 Кінематична схема механізму У таблицях вихідних даних і кінематичній схемі механізму прийнято такі позначення: GD2 I,II - махові моменти робочих механізмів, тм2 ; μ - передатне відношення механічної передачі; MСП, МСК - моменти опору на початку і в кінці робочого циклу, кНм; n - число приводних двигунів, шт.; ωуст - усталена швидкість, 1/с; ω1 - знижена швидкість під час пуску, 1/с; ω6 - знижена швидкість під час гальмування, 1/с; ε1 ,ε3 ,ε5 ,ε7 - кутові прискорення на відповідних ділянках діаграми швидкості, 1/с2 ; t2, t4 , t6 , - тривалість руху зі сталою швидкістю , с ; t0 - тривалість паузи, с. Моменти інерції шестерень редуктора вибирають у таких межах: JШ1 = JШ2 = (0,05…0,1) JДВ JШ3 = (0,005…0,01) J1,2 ηn 0,9...0,98   ω1 - знижена швидкість під час пуску, рад/с; ω1 - знижена швидкість під час пуску, рад/с;ω6 - знижена швидкість під час гальмування, рад/с; ε1,ε3,ε5,ε7 - кутові прискорення на відповідних ділянках діаграми швидкості, рад/с2; t2,t4,t6 - тривалість руху зі сталою швидкістю , с ; t0- тривалість паузи, с. Моменти інерції шестерень редуктора вибирають у таких межах:  Коефіцієнт корисної дії передачі:   1.Вибір і перевірка електродвигуна 1.Вибір і перевірка електродвигуна За вихідними даними визначають приведений до частоти обертання вала електродвигуна момент статичного опору на початку і в кінці робочого циклу  де ωдв = μ ω уст - частота обертання двигуна  Приймаємо ηn 0,94   За середнім значенням приведеного статичного моменту знаходять розрахункову потужність двигуна Pрозр. = Мс.серωдвkз , кВт, де kз 1,1...1,3 - коефіцієнт запасу, більше значення якого беруть для значних прискорень. Приймаємо kз = 1,2   Оскільки в кожній фазі машини у вентильному двигуні за один оберт вала струм протікає протягом  , то статорні обмотки використовуються гірше ніж у звичайному двигуні (γ- кут комутації). , то статорні обмотки використовуються гірше ніж у звичайному двигуні (γ- кут комутації).Потужність синхронної машини у вентильного двигуна у порівнянні з потужністю для синусоїдального живлення визначається коефіцієнтом габаритної потужності. Залежність коефіцієнта габаритної потужності від кутових параметрів вентильного двигуна і законів керування зображено на рис. 1.2.  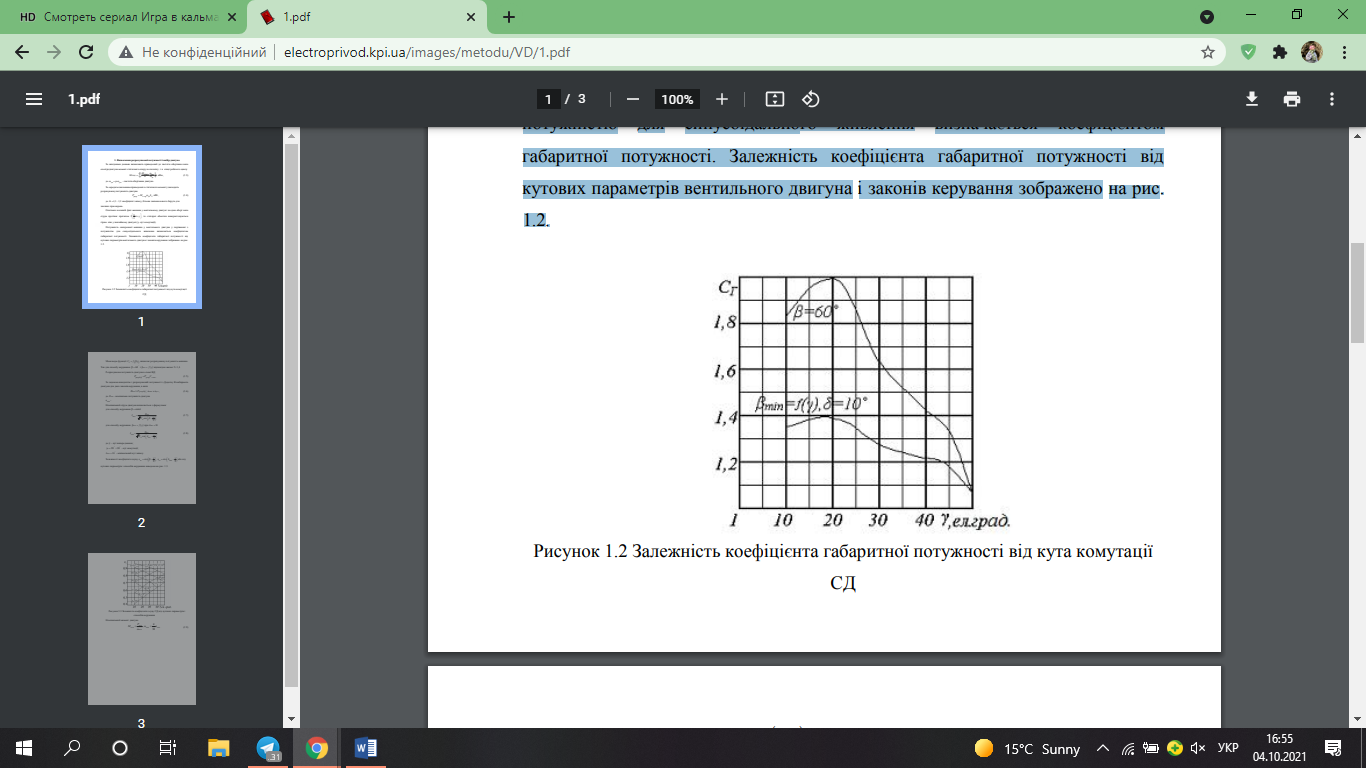 Максимум функції CГ = f β,γ визначає розрахункову потужність машини. Так для способу керування β = 60 і β min f γ відповідно маємо 2 і 1,4. Розрахункова потужність двигуна в схемі ВД: Pрозр.ВД Ррозр. СГmax (1.5) За заданою швидкістю і розрахунковій потужності з Додатку В вибирають двигуни для двох законів керування, в яких  (1.6) (1.6)Так як для способу керування β = 60 буде коефіцієнт 2, тоді розрахункова потужність двигуна в схемі ВД: Pрозр1.ВД Ррозр. СГmax =  для способу керування β min f γ буде коефіцієнт 1,4, тоді розрахункова потужність двигуна в схемі ВД: Pрозр2.ВД Ррозр. СГmax =    За швидкістю і розрахунковою потужністю вибирають двигун (Додаток А), у якого За швидкістю і розрахунковою потужністю вибирають двигун (Додаток А), у якого  , , Таблиця 1.3
де Рном - номінальна потужність двигуна. nном - номінальний струм двигуна; визначається з формулами: для способу керування β = const  (1.7) (1.7) для способу керування β min f γ при δ min 10  (1.8) (1.8) де β - кут випередження; γн = 25о - кут комутації; δmin 10 - мінімальний кут запасу. Залежності коефіцієнта зсуву  , ,  а 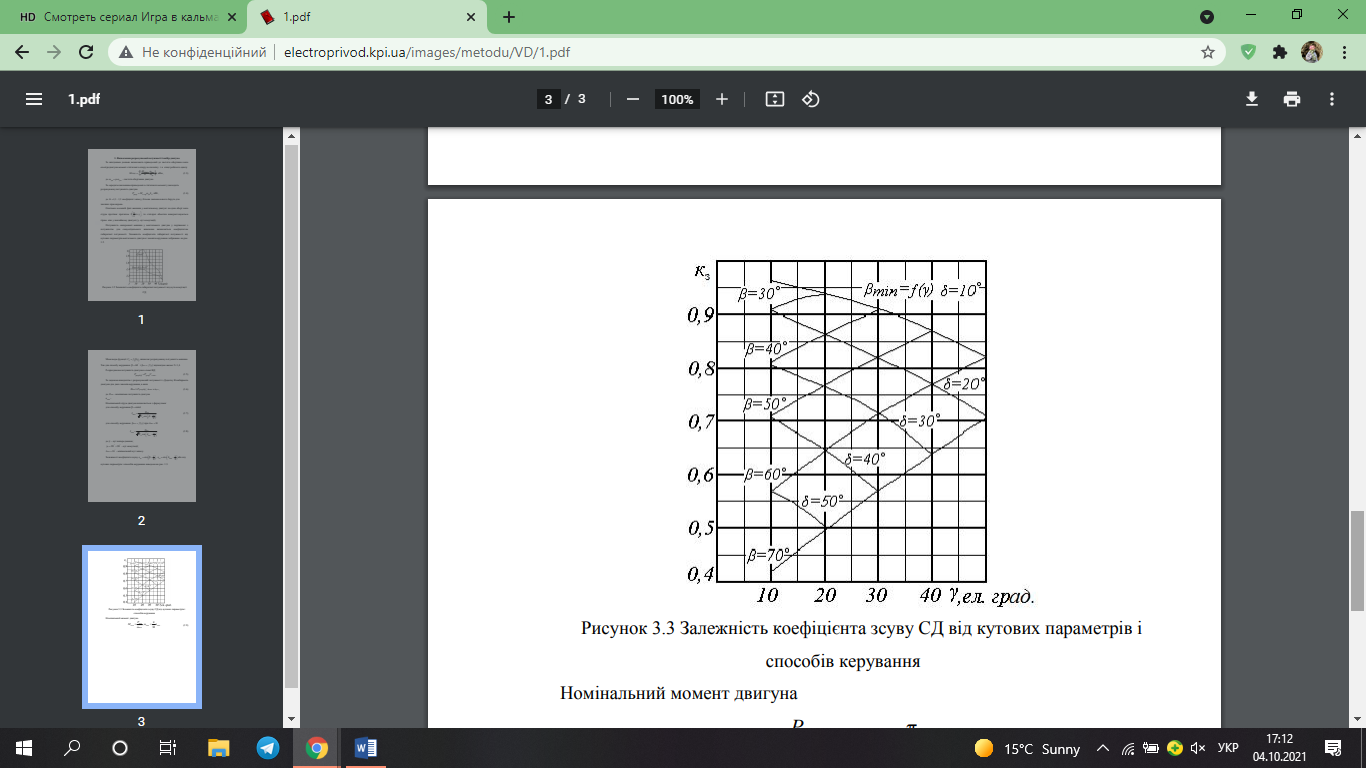 бо від кутових параметрів і способів керування наведено на рис. 1.3. Рисунок 3.3 Залежність Коефіцієнта зсуву СД від кутових параметрів і способів керування Номінальний момент двигуна:      2.Розрахунок і побудова діаграм навантажень 2.Розрахунок і побудова діаграм навантаженьЧас розгону і гальмування при постійному прискоренні на і-й ланці діаграми  де ωпоч ,ωкін - початкова і кінцева кутові швидкості двигуна на i-й ділянці діаграми; εi m p.м - кутове прискорення на і-й ділянці діаграми.        Загальний час циклу    Приведений момент інерції системи:  Визначимо момент інерції двигуна, використовуючи маховий момент:  Момент інерції робочого механізму:   Моменти інерції шестерень редуктора: Моменти інерції шестерень редуктора:   Розрахунок моменту статичного опору  , ,Оскільки Мск=Мсп, то для всіх точок Мcj=Мсп=  кН·м кН·мРозрахунок діаграми навантажень Приводимо кутові швидкості і прискорення механізму до двигуна:        Значення потрібного моменту на валу двигуна в j-й точці діаграми знаходять за рівнянням руху                За цими характеристиками будуємо діаграму навантаження (Рис. 2.1)    Рисунок 2.1 – Тахограма двигуна 3.Перевірка вибраного двигуна  Вибраний двигун перевіряють за тепловим режимом і за перевантажувальною спроможністю. Для перевірки вибраного двигуна за нагріванням знаходять еквівалентний момент. З урахуванням невеликої різниці між початковим і кінцевим моментами в період прискорення й уповільнення  де α=0,65...0,75, β=0,33...0,50 - коефіцієнти, що враховують погіршення умов охолодження двигунів при зменшенні швидкості і зупинці. Приймаємо α=0,7; β=0,4.  Вибраний двигун повинен відповідати таким умовам: CгmaxMекв≤Mном CгmaxMmaxд ≤Mкр, де Mдmax– максимальне значення моменту (за діаграмою навантаження), Mкр=λ·Mн   Перша умова задовольняється    Обраний двигун задовольняє обидві умови.  4.Вибір тиристорного перетворювача 4.Вибір тиристорного перетворювачаТиристорний перетворювач із ланкою постійного струму складається з керованого трифазного мостового випрямляча і залежного трифазного мостового інвертора. 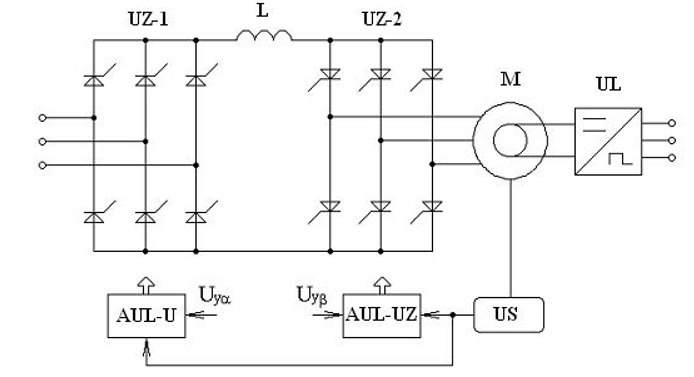 Рисунок 4.1 - Функціональна схема вентильного двигуна з ланкою постійного струму Оскільки тиристорні перетворювачі для вентильних двигунів випускаються не на весь ряд потужностей, то в загальному випадку вибираємо стандартний реверсивний перетворювач привода постійного струму, з умови:  , ,де Рном.п.р. - номінальна потужність перетворювача; Рном - номінальна потужність двигуна. Використовуємо один тиристорний агрегат реверсивного перетворювача як випрямляч, інший - як інвертор. Замінюємо низьковольтні тиристори серійного перетворювача на високовольтні, змінивши паралельну схему ввімкнення напівпровідникових вентилів на послідовну. Подальший вибір тиристорного перетворювача за відомої схеми зводиться до вибору типу і параметрів тиристорів. Для мостових трифазних схем максимальна величина середнього значення випрямленої напруги Ud0, номінальна лінійна напруга двигуна Uном і лінійна напруга мережі Uмер пов'язані в такий спосіб   Значення струму на вході в інвертор для двох випадків: Для способу керування β = const  Для способу керування βminf(γ)при δmin=10  Обираємо тиристор з параметрами:
 Знайдемо число послідовно ввімкнених вентилів у плечі моста перетворювача і число паралельних ланок. Знайдемо число послідовно ввімкнених вентилів у плечі моста перетворювача і число паралельних ланок.Коефіцієнт запасу за напругою і струмом обираємо:  . .     Розрахуємо згладжувальний реактор  – число пар полюсів – число пар полюсівІндуктивність статора двигуна:   Індуктивність реактора:    Обираємо наступні реактори, які будуть зєднуватись послідовно по 5 та3 шт. Обираємо наступні реактори, які будуть зєднуватись послідовно по 5 та3 шт.
Потужність, яку споживає електропривод  ККД електропривода системи  де  - ККД відповідно трансформатора, тиристорного перетворювача, двигуна і редуктора. - ККД відповідно трансформатора, тиристорного перетворювача, двигуна і редуктора.Витрата електроенергії за рік, кВт/год:  де Т – число годин роботи привода за рік (приймаємо 2500 год.);  - коефіцієнт, який ураховує втрати енергії при зупинці привода. Для шахтного підйому - коефіцієнт, який ураховує втрати енергії при зупинці привода. Для шахтного підйому  . .Розрахункові дані для вибору синхронних двигунів та тиристорних перетворювачів у залежності від способу керування зводимо в таблицю: Таблиця 4.1 Порівняльна таблиця для законів керування ВД
Аналіз таблиці показує, що потужності електродвигуна і тиристорного перетворювача з машинною комутацією значно нижчі для способу керування βmin f(γ), ніж для β = const.  Схема керування для закону βmin f(γ)при δmin = const має найменше споживання встановленої потужності електроустаткування, тож подальші розрахунки проводимо для неї. Схема керування для закону βmin f(γ)при δmin = const має найменше споживання встановленої потужності електроустаткування, тож подальші розрахунки проводимо для неї.5. Визначення параметрів розімкненої структурної схеми електропривода Структурну схему вентильного двигуна для способу керування βminf(γ)при δmin=10 наведено нижче. 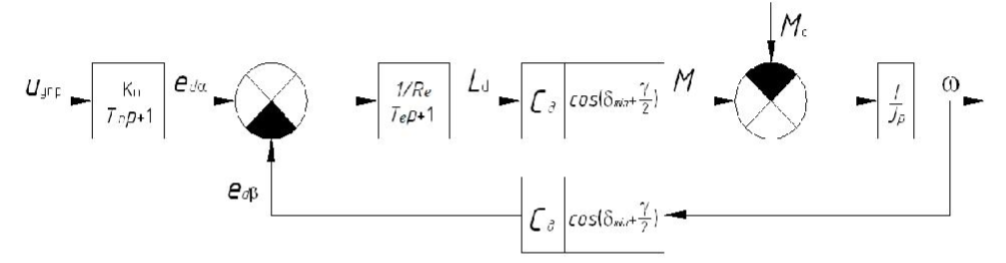 Рисунок 5.1 – Структурна схема вентильного двигуна  Структурній схемі відповідають такі рівняння Структурній схемі відповідають такі рівняння  де  - середні значення ЕРС випрамляча та інвертора; - середні значення ЕРС випрамляча та інвертора; - стала двигуна; - стала двигуна; - коефіцієнт передачі перетворювача; - коефіцієнт передачі перетворювача; - електромагнітна стала часу перетворювача; - електромагнітна стала часу перетворювача; - напруга управління перетворювача; - напруга управління перетворювача; - еквівалентні значення активного опору і індуктивності 4перетворювального кола вентильного двигуна відповідно. - еквівалентні значення активного опору і індуктивності 4перетворювального кола вентильного двигуна відповідно. Еквівалентний опір кола перетворювача знаходять зі схеми перетворювального кола ВД, зображеної на рис 1.5 Еквівалентний опір кола перетворювача знаходять зі схеми перетворювального кола ВД, зображеної на рис 1.5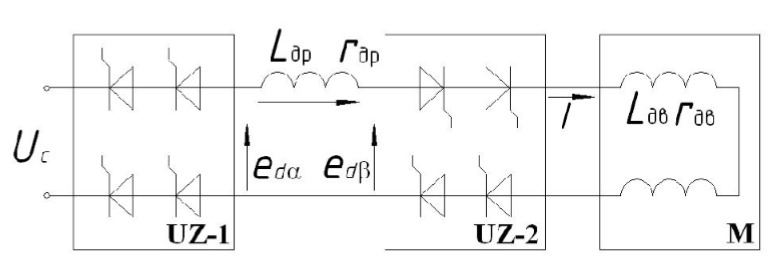 Рисунок 5.2 – Схема перетворювального кола ВД Еквівалентний опір кола перетворювача:  Опір обмоток двигуна визначається за формулою:  Опір тиристора у відкритому стані  Еквівалентний опір, що враховує зменшення випрямленої напруги в період комутації вентилів:  де m=3 – число фаз перетворювача Індуктивний опір вторинної обмотки трансформатора   -номінальні напруга і струм вторинної обмотки трансформатора (мережі); -номінальні напруга і струм вторинної обмотки трансформатора (мережі); - напруга короткого замикання трансформатора. - напруга короткого замикання трансформатора.Еквівалентна індуктивність у колі перетворювача  Еквівалентна електромагнітна стала часу у колі перетворювача  Стала двигуна:   Електромагнітна стала часу перетворювача приймається такою, що дорівнює половині періоду мережі живлення Електромагнітна стала часу перетворювача приймається такою, що дорівнює половині періоду мережі живлення Коефіцієнт передачі перетворювача визначається з залежності  , що наводиться в каталогах, або будується. , що наводиться в каталогах, або будується.Коефіцієнт передачі перетворювача:  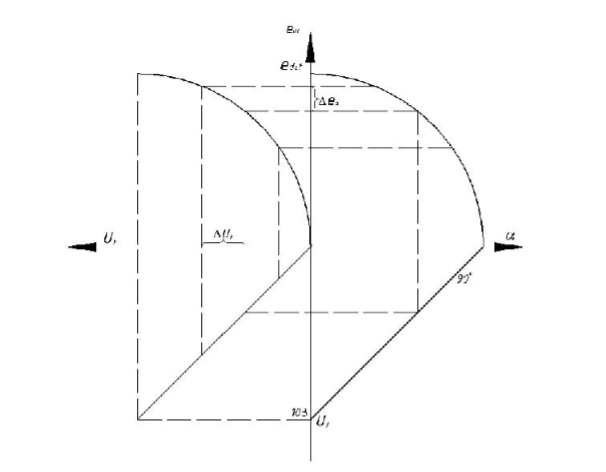 Рисунок 5.3 – Характеристики для визначення коефіцієнта передачі перетворювача ВД  6. Визначення втрат енергії у вентильному двигуні за цикл роботи, під час пуску і гальмування 6. Визначення втрат енергії у вентильному двигуні за цикл роботи, під час пуску і гальмуванняОскільки магнітний потік двигуна не змінюється, за відомими кратностями моменту можна знайти кратності струму в колі якоря на ділянках циклу       де  - максимальне значення коефіцієнта габаритної потужності. - максимальне значення коефіцієнта габаритної потужності.Номінальні змінні втрати потужності в перетворювачі і двигуні  Втрати енергії у вентильному двигуні за цикл роботи:   Аналогічно визначаються втрати енергії при пуску і гальмуванні. При пуску:  При гальмуванні:  7.Розрахунок ККД привода для його роботи у заданому циклі  Визначимо повні втрати потужності в номінальному режимі Визначимо повні втрати потужності в номінальному режимі Постійні втрати потужності:  Приймаючи, що задані кратності струму і моменту визначаються кратністю потужності навантаження на валі, визначаємо ККД циклу двигуна:    Висновок ВисновокМетою розрахункової роботи був розрахунок і вибір енергозберігаючого електропривода з вентильним двигуном. За умовами завдання було обрано двигуни для двох законів керування. Виходячи з порівняння характеристик цих двигунів та обраних для них тиристорів стало очевидним, що за законом керування βminf(γ)при δmin = const схема має менше споживання встановленої потужності електроустановки. Двигун, підібраний для цього закону, забезпечує ефективну роботу електричного приводу, оскільки його потужності достатньо, щоб при пуску розігнати робочий механізм за час, вказаний у завданні. Виходячи з розрахунку ККД приводу, можна сказати, що заданий цикл роботи забезпечує його ефективну експлуатацію. |











 , кВт
, кВт , кВт
, кВт , В
, В , А
, А , А
, А , В
, В , кВт
, кВт