ыв. МОНИН. Самостоятельная работа По дисциплине Земледелие с основами растениеводства
 Скачать 234.36 Kb. Скачать 234.36 Kb.
|

|
Самостоятельная работа По дисциплине «Земледелие с основами растениеводства» Ответы на контрольные вопросы Выполнил: Студент гр. И-31-19zu Монин Д.О. Проверил: Д.С.-Х.Н., профессор Ивченко В.К, Красноярск, 2021 Содержание 1. Что такое точное земледелие? 2. Перечислите составные части системы точного земледелия. 3. Что такое параллельное вождение? 4. Перечислите стандартные компоненты системы параллельного вождения. 5. Что такое автопилотирование/? 6. В чем преимущество автопилотирования? 7. Как отличить трактор, оборудованный системой автопилотирования? 8. При выполнении каких агротехнических операций применяется параллельное вождение? 9. Какие Вы знаете режимы, применяемые при параллельном вождении? 10. Где взять эти шаблоны? 11. В чем состоит преимущество применения параллельного вождения? 1. Что такое точное земледелие? Точное земледелие — это система управления продуктивностью посевов, основанная на использовании комплекса спутниковых и компьютерных технологий. Вместо того, чтобы пахать, сеять, вносить удобрения «на глаз», как это делалось на протяжении всей предыдущей истории сельского хозяйства, сегодня фермеры могут точно рассчитать количество семян, удобрений и других ресурсов для каждого участка поля с точностью до метра. После того как на основе спутниковых и лабораторных данных составляется точная карта поля с указанием характеристик каждого его участка, фермер получает возможность более рационально распределять ресурсы между ними. Таким образом, удается избежать перерасхода ресурсов там, где они прежде использовались в избытке, и повысить продуктивность тех участков поля, которые ранее недополучали в удобрениях, вспашке или поливе. При достаточно большом масштабе такой подход позволяет снизить расходы на производство единицы продукции и повысить отдачу с каждого квадратного метра земли. Кроме того, эта технология открывает дополнительные возможности для повышения качества продукции и в глобальном масштабе снижает нагрузку на окружающую среду. Система точного земледелия — это не строго определенный набор методик и технических средств, а, скорее, общая концепция, основанная на использовании технологий спутникового позиционирования (GPS), геоинформационных систем (GIS), точного картографирования полей и др. 2. Перечислите составные части системы точного земледелия. Систему точного земледелия можно подразделить на четыре подсистемы: менеджмент организационно-методических мероприятий на основе автоматизированного сбора данных; управление посевами с учетом неоднородности агроэкологических условий роста и развития культур в пределах отдельно взятого поля; менеджмент; менеджмент рабочих процессов на основе использования робототехники 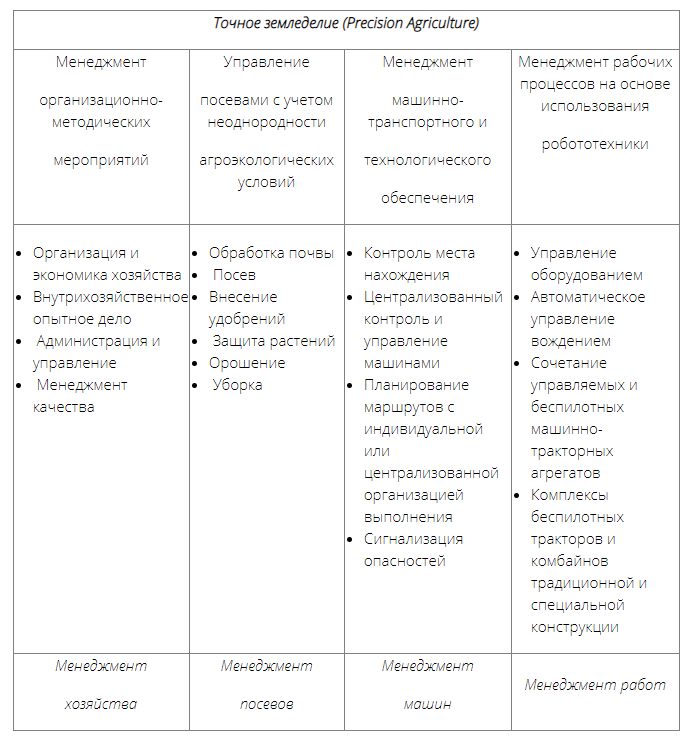 3. Что такое параллельное вождение? В сельском хозяйстве получили широкое распространение и доказали свою эффективность три класса приборов для управления движением тракторов и комбайнов, использующих GPS-приемники: системы параллельного вождения и подруливающие устройства для автопилотирования. Использование космических навигационных систем становится возможным после установки на транспортное средство специального приемника, постоянно получающего сигналы о местоположении навигационных спутников и расстояниях до них. В зависимости от требуемой точности управление такой техникой осуществляется механизатором вручную по показаниям метки на экране дисплея, либо с использованием подруливающего устройства или автопилотирования. Система параллельного вождения является самой наглядной и быстро окупаемой частью технологии точного земледелия, предназначена для проведения полевых работ и наиболее эффективна в условиях применения с широкозахватной техникой. Система параллельного вождения – это активное участие механизатора в управлении машиной по схеме «измерение текущих координат сельхозмашины – отображение отклонений от заданного маршрута на табло в кабине – вращение механизатором рулевого колеса для удержания агрегата на заданном маршруте». Перечислите стандартные компоненты системы параллельного вождения.  Рисунок 1 – Компоненты системы: 1 – дисплей CFX-750; 2 – крепление RAM и винты; 3 – краткое руководство пользователя; 4 – компакт-диск; 5 – кабель GPS-антенны; 6 – шина питания / кабель CAN; 7 – кабель питания; 8 – антенна AG25; 9 – монтажная пластина антенны AG25 Что такое автопилотирование? Автопилотирование отличается от параллельного вождения тем, что отклонения от заданной траектории, вырабатываемые GPS-приемником и навигационным контроллером, через специальные устройства (управляющий клапан) вводятся непосредственно в гидравлическую систему управления ходовой частью трактора, исключая инертность и люфт рулевого управления. В дополнение на трактор устанавливается специальный датчик угла поворота колес. Такая система обеспечивает максимальную точность (отклонение ±2 см) движения по маршруту без вмешательства механизатора. 6. В чем преимущество автопилотирования? Основное преимущество использования систем параллельного вождения – уменьшение ошибок (сведение к минимуму человеческого фактора) при обработке полей. Практика показывает, что при опрыскивании культур традиционным способом большинство операторов предпочитают проходить соседние ряды с перекрытием, чтобы избежать пропусков. В результате взаимное перекрытие рядов, даже с использованием пенных маркеров, составляет не менее 5 %. Применение указателей курса с подруливающими устройствами снижает перекрытие до 2…3 % и менее. 7. Как отличить трактор, оборудованный системой автопилотирования? Приемник поддерживает различные варианты для поправок GPS, в т. ч. WAAD, OmniSTAR. Использование этих поправок позволяет обеспечить точность проходов до ±10 см. Панель в графическом виде показывает текущее положение транспортного средства и обеспечивает водителя дополнительной информацией при разворотах или вождении по изогнутым рядам. Она имеет графический дисплей с возможностью считывания данных при ярком солнечном свете. Полевой компьютер с программным обеспечением – система управления полевыми данными, использующимися для навигации, автоматического вождения, ведения записей, полевой съемки, площадной съемки, приложений с изменяемыми показателями. Контроллер, используя данные от GPS-приемника и внутренних датчиков, находящихся в состоянии покоя и работающих по 6 осям, передает команды для системы управления. Датчик угла поворота колес предназначен для непрерывной обратной связи с системой управления трактором. Гидравлический клапан получает электрические сигналы от контроллера и преобразует их в гидравлические, которые система использует для удержания транспортного средства на заданном курсе. Подруливающее устройство обеспечивает параллельное вождение с точностью до 10 см. Базовая станция передает поправки GPS-положения на GPS-приемник трактора через радио или GSM-модем для определения координат с высокой точностью (погрешность менее ±2 см). 8. При выполнении каких агротехнических операций применяется параллельное вождение? По сравнению с обычным управлением машинно-тракторным агрегатом применение систем параллельного вождения при выполнении технологических операций позволяет исключить повторные обработки соседних проходов (перекрытий) и пропуски необработанных участков, повысить производительность и комфортность работы, снизить утомляемость водителя, сократить расход топлива и технологических материалов и осуществлять работы при любой видимости и в ночное время. При этом обеспечиваются различные режимы вождения по прямым и криволинейным траекториям. Основные направления применения систем параллельного вождения — это: 1. Опрыскивание и разбрасывание удобрений. 2. Посевные работы. 3. Обработка пропашных культур. 9. Какие вы знаете режимы, применяемые при параллельном вождении? Прямая АВ - Движение по полю с использованием прямой линии AB, если не задаются поворотные полосы, осуществляется по параллельным прямолинейным рядам. Когда транспортное средство находится на направляющей линии, ее протягивают на 1 км до точки A и после точки В. Благодаря этому максимально удобно увидеть следующую полосу и попасть на линию после поворота. Идентичная кривая - Схема идентичной кривой не создает прямую линию, а записывает точную траекторию между точками A и B. Все последующие направляющие линии будут совпадать с главной кривой независимо от места движения. Схему идентичной кривой используют в случае, когда необходимо работать в поле, ограниченном плавными кривыми. Адаптивная кривая - Схема адаптивной кривой обеспечивает навигацию вдоль кривой и ее обновление после прохождения каждой полосы с учетом всех необходимых отклонений. При этом непрерывно записывается траектория движения и обеспечивается навигация в соответствии с учетом последней пройденной траектории. Круговая траектория - Этой схемой предполагается движение по концентрическим окружностям вокруг центральной оси. Поворотная полоса -Схема поворотной полосы позволяет определить границу (поворотную полосу) области, а также содержащиеся в ней направляющие линии. Она используется для того, чтобы обеспечить пространство для поворотов. FreeForm - Схему FreeForm используют для создания кривых и прямых линий с целью навигации на полях любой формы. На дисплее записывается точная траектория движения машины, применяемая для создания следующей направляющей линии. 10. Где взять эти шаблоны? Управление системой Система рулевого управления на основе EZ-Steer работает благодаря внутреннему приемнику GPS дисплея CFX-750, обеспечивая навигацию транспортного средства. На экране навигации отображаются текстовая рабочая информация и значки, что обеспечивает доступ к ней и к различным функциям системы. Доступность текста и значков зависит от ее настройки. Перед включением системы необходимо: – открыть поле на экране навигации; – задать линию АВ; – разместить транспортное средство в заданных пределах параметров включения. 11. В чем состоит преимущество применения параллельного вождения? Системы параллельного вождения способны многократно облегчить, сократить по времени и удешевить практически все процессы, связанные с обработкой земли, внесением удобрений, посевом, уборкой урожая, обеспечивая при этом эффективный контроль топлива. Системы параллельного вождения, в частности, позволяют оставить в прошлом извечную боль агрария — двойное возделывание почвы и опрыскивание растений, приводящие не только к значительным неоправданным затратам, но и к снижению урожайности. |