Системы телемеханики. Системы телемеханики
 Скачать 1.6 Mb. Скачать 1.6 Mb.
|

|
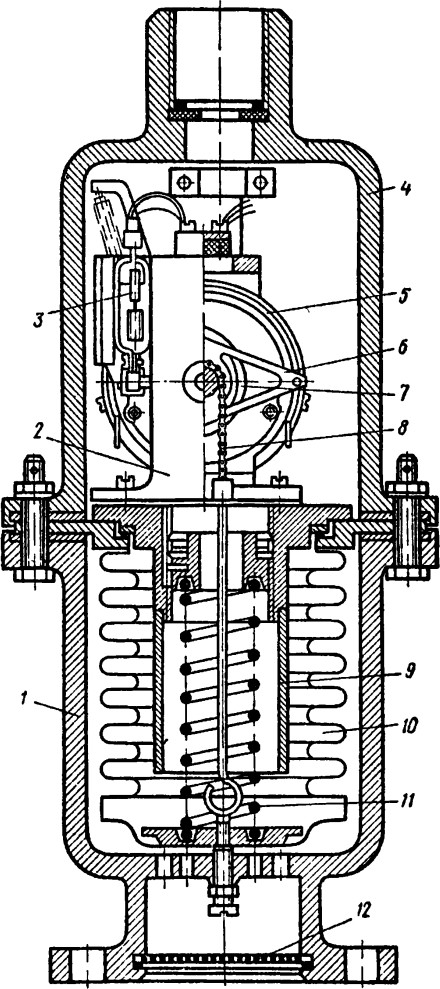
Тема: СИСТЕМЫ ТЕЛЕМЕХАНИКИ Классификация систем телемеханики Системы телеизмерения Системы телеуправления КЛАССИФИКАЦИЯ СИСТЕМ ТЕЛЕМЕХАНИКИ Телемеханикой называют область техники, охватывающую теорию и практику устройств передачи информации и управления на расстоянии. В ряде случаев телемеханические системы дополняют системы автоматики, совместно решая общую задачу контроля и управления про- изводственными объектами. Различают два вида систем телемеханики: телемеханику централизованного контроля и телеавтоматизацию управления. В первом случае контроль и управление объектами, находящимися на расстоянии, сосредоточиваются в центральном пункте, однако само управление осуществляется человеком (диспетчерское управление). Для крупных объектов задачи диспетчерского управления настолько сложны, что возникают задачи автоматизации самого диспетчерского управления. При телеавтоматизации, т. е. органическом сочетании автоматизации и телемеханики, из центрального пункта осуществляется автоматическая работа автоматизированных объектов, разделенных расстоянием, являющихся частью общей автоматизированной системы. В частности, телеавтоматизация может применяться совместно с управляющей машиной. В этом случае системы телемеханики вводят в управляющую машину информацию о ходе производственного процесса на отдельных участках и передают этим участкам команды, выработанные управляющей машиной. Устройства телемеханики выполняют следующие функции: телеизмерение (ТИ) — передачу на расстояние значений величин, характеризующих режим работы контролируемых установок; телеуправление (ТУ) — передачу на расстояние сигналов управления, воздействующих на исполнительные механизмы управляемых установок; телесигнализация (ТС) — передачу на расстояние сигналов о состоянии контролируемых объектов или служебных сигналов другого назначения. Телеизмерение может осуществляться с помощью систем ближнего действия (на расстояниях до 15 км) и систем дальнего действия (на расстояниях до сотен километров). В системах ближнего действия измеряемая величина преобразуется в значение тока или напряжения изменяемой интенсивности и передается по линии связи. В системах дальнего действия измеряемая величина передается с помощью электрических импульсов постоянного тока или изменяющейся частоты пе- ременного тока. Например, в системах водоснабжения и канализации телеизмерение применяют для передачи значений параметров, характеризующих режим работы отдельных станций и всей системы в целом, с насосных станций, очистных сооружений, основных точек сети на соответствующий диспетчерский пункт. К таким параметрам относятся: расход воды, подаваемой отдельными насосными станциями или отдельными насосными агрегатами, а также расходы воды, передаваемые по водоводам и магистральным сетям; давление, развиваемое насосными агрегатами и станцией в целом; давление в основных точках сети, характеризующее состояние системы; уровень воды в резервуарах, определяющий запас воды в системе и режим работы станций; сила тока, характеризующая нагрузку насосов, трансформаторов, фидеров и других элементов электрической системы; напряжение в электрической сети, определяющее режим работы электрооборудования. Телеуправление позволяет с помощью передаваемых импульсов воздействовать на исполнительные механизмы управляемых объектов. Средства телеуправления используют для пуска и остановки на расстоянии (из диспетчерского пункта) насосных агрегатов, включения и отключения соответствующих выключателей электросети, закрытия, открытия и регулирования степени открытия задвижек, включения и отключения воздуходувок, дробилок и др. Возможность осуществления этих операций на расстоянии позволяет диспетчеру без помощи дежурного персонала сооружений быстро вводить в действие или выводить из работы соответствующие агрегаты, когда этого требует режим работы системы в условиях нормальной эксплуатации. Кроме того, в аварийных условиях средства телеуправления позволяют диспетчеру быстро производить необходимые переключения с целью локализации аварии. Телесигнализация используется для автоматической передачи сигналов о состоянии насосных агрегатов, задвижек, фильтров, масляных выключателей, дробилок и других агрегатов сооружений. С помощью средств телесигнализации на мнемонической схеме системы, воспроизведенной на щите диспетчерского пункта, непрерывно указывается состояние элементов оборудования систем и ее сооружений, а также любое изменение положения агрегатов или изменение параметров, как в процессе нормальной эксплуатации, так и во время аварий. Это поз- воляет диспетчеру ориентироваться при производстве оперативных переключений, особенно во время аварии, не прибегая к телефонным переговорам с персоналом станции. В телеуправлении и телесигнализации используются одинаковые способы передачи сигналов и, как правило, одни и те же устройства. В системах телеуправления и телесигнализации сигналы управления и извещательные сигналы зашифровываются с помощью специальных устройств (шифраторов) и специальный передатчик посылает в линию связи импульсы электрического тока с определенными параметрами (код). Эти импульсы на приемном пункте принимаются специальным приемным устройством, расшифровываются дешифратором, который передает полученный сигнал в исполнительные цепи в пункте управления или в сигнальные цепи на диспетчерском пункте. В устройствах телеуправления и телесигнализации используются для передачи сигналов качественно отличные признаки тока: полярность, амплитуда, продолжительность посылки импульса тока, частота переменного тока. По способам использования линий связи, устройства телеуправления и телесигнализации делят на две основные группы: многоканальные устройства ближнего действия и малоканальные устройства дальнего действия. Важнейшее значение в телемеханике имеют следующие понятия. Канал связи — с его помощью осуществляется передача сигналов на расстояния. Кроме проводов и кабелей к оборудованию каналов связи относятся усилители, коммутаторы и фильтры. Канал связи должен обеспечивать наименьшие искажения передаваемых сигналов. Понятие о канале связи не следует смешивать с термином «линия связи», поскольку по одной линии связи может быть создано несколько каналов связи для независимой передачи нескольких сигналов. Сигнал — материальный носитель информации. Существует много методов создания сигналов в системах телемеханики, имеющих целью снизить искажения, возникающие из-за помех и изменения параметров канала связи. Помехоустойчивость подразумевает способность системы осуществлять передачу сигналов без искажений при наличии помех. Система считается достаточно помехоустойчивой, если рас- хождение между отправленным и полученным сигналами не превышает заданной величины. Большое значение имеют точность, быстродействие, пропускная способность и надежность систем телемеханики. Таким образом, основными непосредственными задачами телемеханики являются: передача большого числа сообщений по одной или ограниченному числу линий связи путем создания на этой линии каналов связи; преодоление технических затруднений, возникающих при передаче сигналов на расстояние вследствие действия различных помех, т. е. обеспечения надежности контроля и управления на расстоянии. СИСТЕМЫ ТЕЛЕИЗМЕРЕНИЯ Телеизмерительной системой называется совокупность технических средств, необходимых для осуществления измерения параметров технологических установок и передачи их на расстояние. На рис. 1 представлена структурная схема телеизмерения.  Рис. 1. Функциональная схема телеизмерения В исходном пункте контролируемая величина X измеряется датчиком 1 и преобразуется в пропорциональную ей вспомогательную величину Y1. Передающее устройство 2 осуществляет передачу по каналу связи 3 вспомогательной величины в приемное устройство 4. В приемном устройстве вспомогательная величина Y2преобразуется и подается на регистрирующий прибор 5. В зависимости от особенностей и принятого метода телеизмерения в качестве сигнала выбирают величину, подвергающуюся возможно меньшим искажениям в канале связи и в процессе преобразования. Способы модуляции сигналов Для передачи сигналов телеизмерения применяют несколько способов их модуляции. Выбор того или другого метода модуляции сигнала производят с учетом сложности преобразования сигнала и условий передачи его на расстояние. Основные способы модуляции сигналов телеизмерения показаны на рис. 2. Модуляция позволяет создавать сигналы на основе следующих импульсных признаков тока. Амплитуда импульса. Для качественного различия импульсов используется различная амплитуда тока. Для четкого различия импульсов обычно используют два импульса со значительно отличающейся (в 2...3 раза и более) амплитудой. Расшифровка амплитудных импульсных признаков на приемной стороне может производиться с помощью реле различной чувствительности. Частота переменного тока. В линию связи посылается переменный ток различной частоты. Для образования частотных характеристик используют различные генераторы. На приемной стороне устанавливаются устройства (частотные селекторы), реагирующие на ток определенной частоты. Такими устройствами могут быть резонансные реле или фильтры, пропускающие определенную полосу частот, на выходе которых через выпрямители включаются реле. Продолжительность (время) импульса. Для качественного различия импульсов используется различная их продолжительность. Для четкого различия импульсов обычно применяют два импульса: длинный и короткий. В некоторых системах ТУ и ТС изменяют продолжительность паузы между импульсами. На приемной стороне временные импульсные признаки фиксируются с помощью реле времени. Фаза переменного тока. В линии связи посылаются синусоидальные токи одинаковой частоты, но сдвинутые по фазе относительно базового (опорного) тока. Для четкого избирания обычно применяют два качественных признака со сдвигом по фазе на 180 °. На приемной стороне фазовые качественные признаки фиксируются с помощью фазочувствительных устройств. Полярность импульса. Качественное различие импульсов характеризуется направлением постоянного или выпрямительного тока. Расшифровка полярных признаков производится поляризованными реле или нейтральными (неполяризованными) реле, включенными через выпрямители. 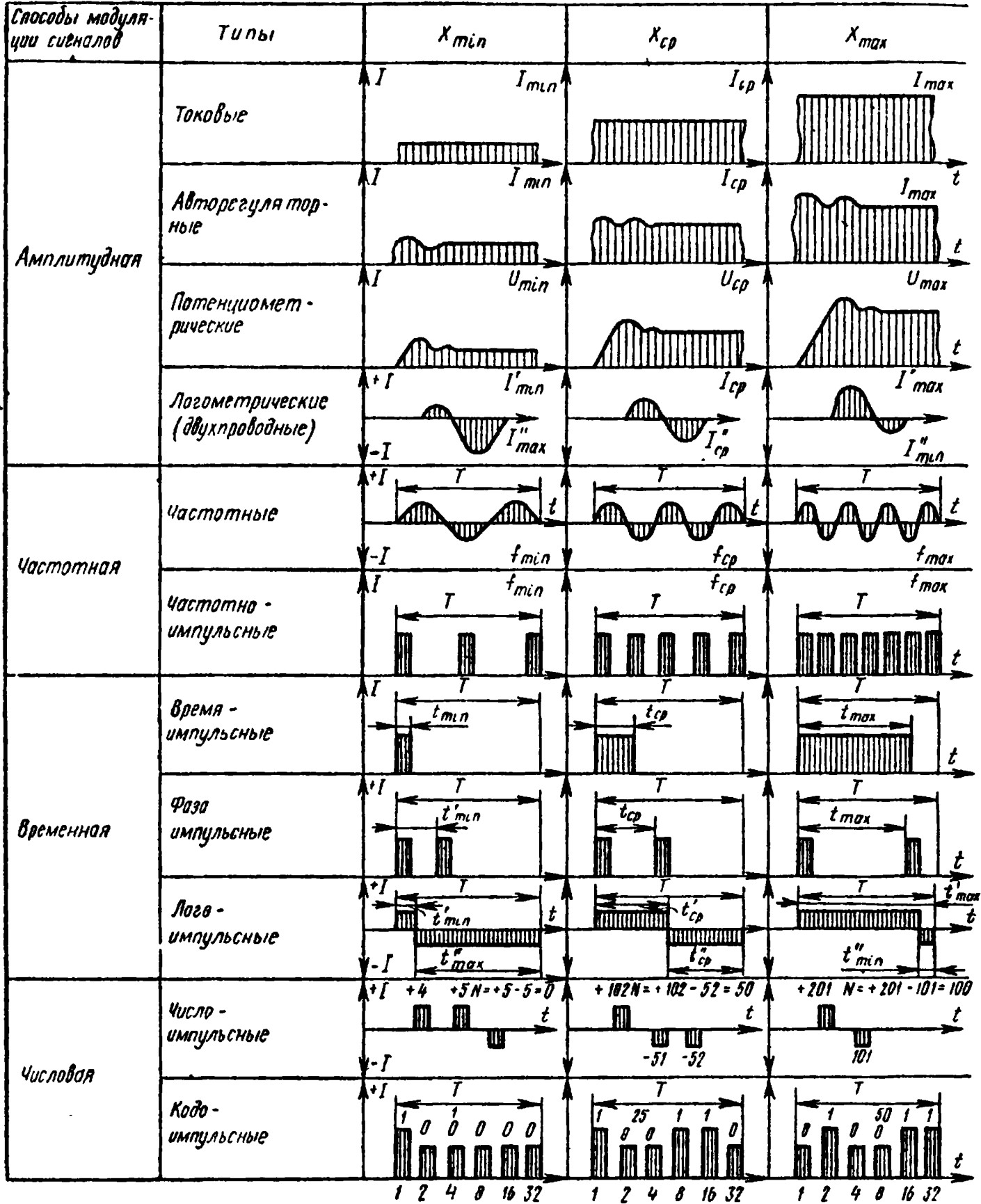 Рис. 2. Диаграмма способов модуляции сигналов телеизмерения В системах телеизмерения ближнего действия для передачи сигналов используется простой метод интенсивности, при котором измеряемая величина передается путем изменения интенсивности тока или напряжения в канале связи. Для уменьшения потери энергии в линии передача осуществляется малыми токами и малыми напряжениями. Передачу удобнее вести постоянным током, так как в этом случае не будут сказываться индуктивность и емкость проводов. Передача сигналов может осуществляться балансным или небалансным способом. Недостатком этого метода является искажение сигналов при изменении параметров канала связи. В силу этого недостатка метод интенсивности не применяется при передаче сигналов на большие расстояния. В системах телеизмерения дальнего действия используются методы импульсной и частотной передачи сигнала, при которых измеряемая величина преобразуется в импульсы постоянного тока или переменный ток меняющейся частоты. Благодаря этому изменения затухания, вносимые каналом связи, не искажают параметра телепередачи. Рассмотрим в качестве примеров некоторые схемы телеизмерения ближнего и дальнего действия. 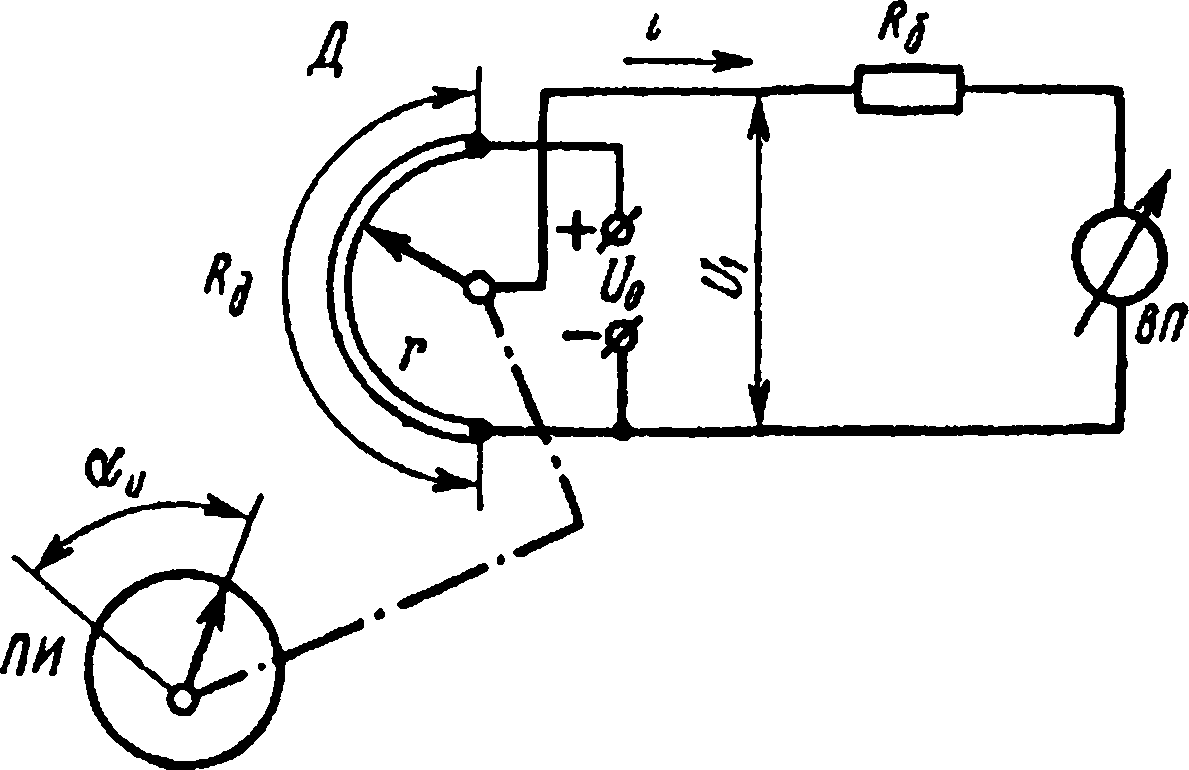 Телеизмерительная схема интенсивности тока с реостатным датчиком ближнего действия (рис. 3) основана на использовании реостата RД, ползунок которого перемещается измерительным прибором одновременно со стрелкой. Изменения тока в линии связи, пропорциональные измеряемой величине, фиксируются вторичным прибором ВП. Во избежание влияния температуры окружающей среды в линию включается активное сопротивление RБ(балластное), которое в несколько раз больше сопротивления линии. Благодаря этому изменение параметров линии связи почти не влияет на погрешность. Телеизмерительная схема интенсивности тока с реостатным датчиком ближнего действия (рис. 3) основана на использовании реостата RД, ползунок которого перемещается измерительным прибором одновременно со стрелкой. Изменения тока в линии связи, пропорциональные измеряемой величине, фиксируются вторичным прибором ВП. Во избежание влияния температуры окружающей среды в линию включается активное сопротивление RБ(балластное), которое в несколько раз больше сопротивления линии. Благодаря этому изменение параметров линии связи почти не влияет на погрешность.Рис. 3. Схема двухпроводной телеизмерительной системы с реостатным датчиком Недостаток схемы телеизмерения с реостатными датчиками заключается в необходимости поддержания постоянства напряжения питания. Этого недостатка можно избежать, если вместо обычного гальванометра применить логометр, т. е. гальванометр с двумя рамками вместо одной. Показания логометра зависят только от отношения токов в его рамках, а не от влияния непостоянства напряжения источника тока. Кроме того, при замене обычного прибора логометром исключаются также погрешности от изменения сопротивления или утечек линии связи. Однако другим недостатком является необходимость трехпроводной линии связи. Индуктивно-выпрямительные системы телеизмерения основаны на использовании индуктивных датчиков. Эти устройства действуют на основе преобразования угла поворота подвижной части измерителя в переменное напряжение. Преобразование осуществляется с помощью индукционного преобразователя. Полученное переменное напряжение преобразуется в постоянный ток. Система телеизмерения уровня воды с реостатным датчиком типа ТУ-2-АКХ Рассмотрим систему телеизмерения уровня воды с реостатным датчиком типа ТУ-2-АКХ. Она предназначена для измерения уровней воды в открытых резервуарах, сигнализации их предельных положений и автоматического управления задвижками или насосными агрегатами, а также автоматического регулирования уровня воды в заданных пределах. Эта система телеизмерения уровней основана на измерении линейной деформации чувствительного элемента. Перемещение чувствительного элемента зависит от высоты столба воды в резервуаре. С помощью гибкой тяги поступательное движение чувствительного элемента, состоящего из винтовой пружины и сильфона, преобразуется во вращательное движение ползуна потенциометра. При этом омическое сопротивление потенциометра изменяется пропорционально линейной деформации сильфона, а следовательно, и показания вторичного контрольно-измерительного прибора находятся в прямой зависимости от изменения уровня воды в резервуаре.
Управление контактами происходит с помощью постоянных магнитов, установленных на двух подвижных рычагах. Перемещением рычагов (относительно положения движка потенциометра) устанавливаются нужные пределы замыкания вакуум-контактов. На корпусе потенциометра имеется специальная круговая шкала, по которой производится установка обоих переключающих постоянных магнитов на заданные пределы сигналов максимального и минимального уровней воды в резервуаре. Электрическая схема (рис. 5) состоит из измерительной и сигнальной частей. В измерительную часть схемы входят феррорезонансный стабилизатор напряжения, выпрямитель ВК, потенциометр RП, добавочное сопротивление RД, балластное сопротивление RБи вторичный контрольно-измерительный прибор. Сигнализирующая часть схемы состоит из следующих элементов: понижающего трасформатора Тр, германиевого выпрямителя ВГ, вакуум-контактов К1и К2, постоянных магнитов M1и М2, электромагнитных реле Р и РУ и промежуточного реле РП. Последнее предназначено для сигнализации предельных положений уровней в резервуаре. С помощью этого реле может быть осуществлено также управление насосным агрегатом, электрифицированной задвижкой, клапаном и т. п. 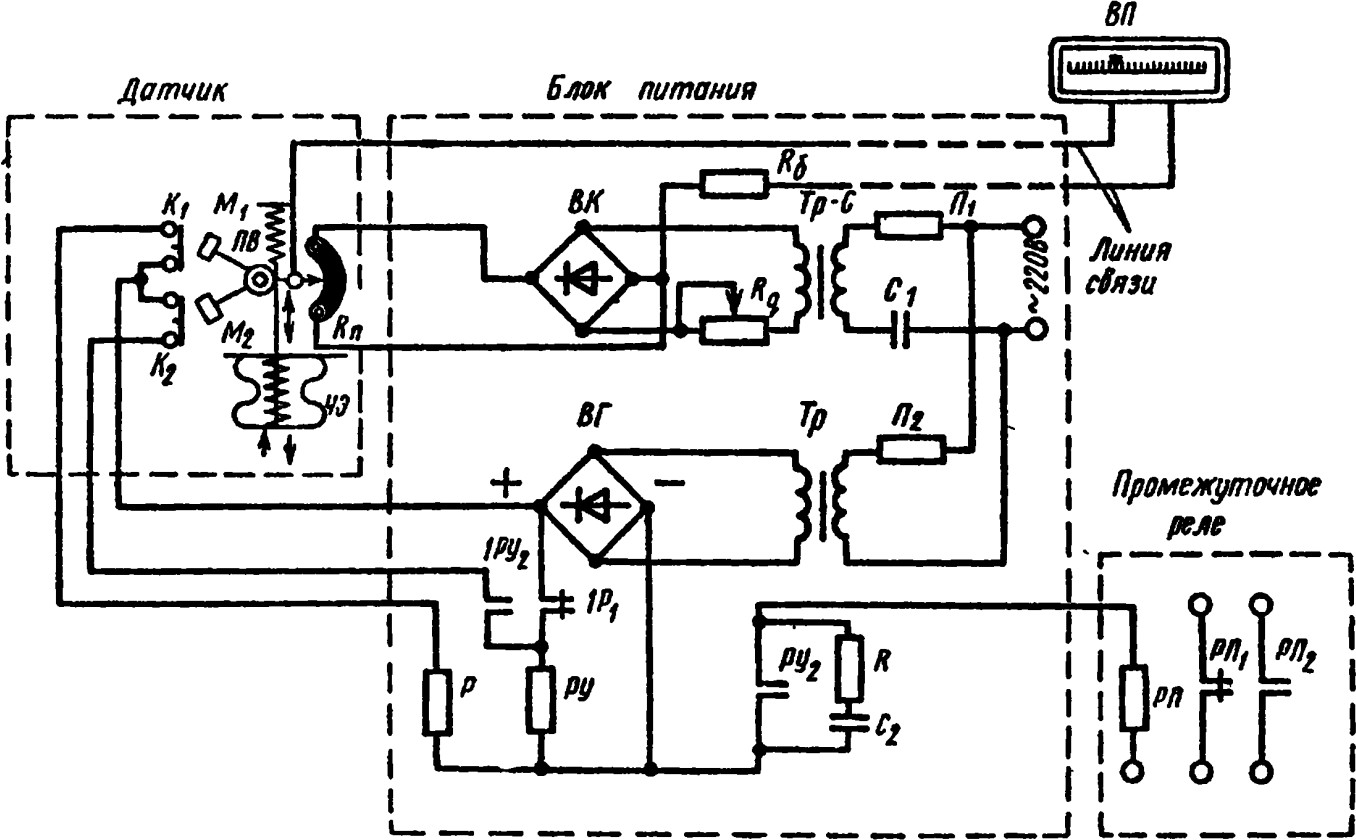 Рис. 5. Принципиальная электрическая схема системы телеизмерения уровней ТУ-2-АКХ: ЧЭ — чувствительный элемент датчика; ПВ — пружина возвратная; ВК — выпрямитель переменного тока; Тр-С — трансформатор-стабилизатор; ВП — вторичный контрольно- измерительный прибор; R — сопротивление постоянное; С1и С2— конденсаторы; П1и П2— предохранители В качестве приемного контрольно-измерительного прибора применяется щитовой милливольтметр со шкалой, проградуированной в метрах водяного столба. Для сигнализации и управления магнитным пускателем насосного агрегата в схему включено промежуточное реле РП типа МКУ с мощными контактными группами. Устройство телеизмерения уровня жидкости с индуктивными датчиками В индуктивно-выпрямительной небалансной системе телеизмерения уровня (рис. 6) имеется преобразователь, состоящий из сельсинного датчика уровня типа ДСУ-1 и вторичного сельсинного преобразователя ВСП-1. При изменении уровня жидкости поплавок перемещается, что вызывает поворот ротора сельсина-датчика, при этом ток в его обмотках изменяется; следовательно, меняется ток в обмотках приемного сельсина, что вызывает поворот его ротора на такой же угол, на который повернулся ротор индукционного преобразователя, который механически связан с рамкой индукционного преобразователя. В индукционном преобразователе- трансформаторе с поворотной рамкой в зависимости от угла поворота рамки изменяется значение индуцированной в ней ЭДС. 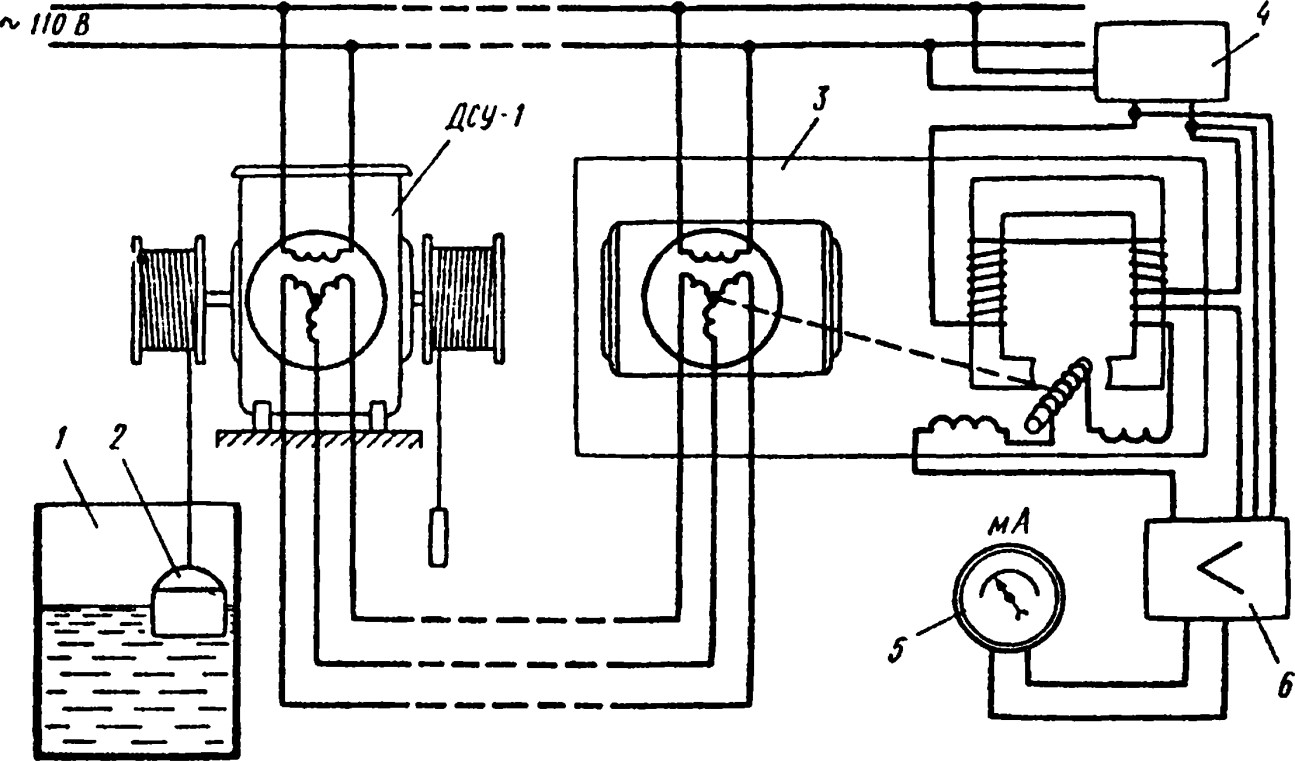 Рис. 6. Принципиальная схема индуктивно-выпрямительной системы телеизмерения уровней воды в резервуарах: 1 — резервуар; 2 — поплавок; 3 — вторичный сельсинный преобразователь типа ВСПИ-1; 4 — стабилизатор напряжения; 5 — вторичный прибор; 6 — выпрямительное устройство Переменное напряжение с рамки преобразователя подается на выпрямительное устройство. Выпрямительный ток по линии связи поступает на диспетчерский пункт и измеряется миллиамперметром, отградуированным в единицах телеизмеряемой величины. Дальность действия при использовании воздушной линии связи не более 7 км, при использовании кабельной линии — до 30 км. Телеизмерительные балансные системы интенсивности ближнего действия Телеизмерительные балансные системы интенсивности ближнего действия характерны более высокой точностью измерений по сравнению с небалансными. Самой простой из балансных систем является система с регулированием тока. Применяются также балансные системы регу- лирования напряжения с помощью автоматического потенциометра. Принцип действия балансной системы с регулированием тока можно пояснить на примере схемы, приведенной на рис. 7. Подвижное устройство первичного измерителя ПИ связано общей осью с уравновешивающим элементом УЭ. Подвижная рамка УЭ включена последовательно в линию связи, на общей оси укреплена подвижная пластина миниатюрного конденсатора С переменной емкости. Поворот оси на небольшой угол вызывает изменения емкости в больших пределах. Высокочастотные колебания генератора Г подводятся к усилителю У через переменный делитель, состоящий из постоянного сопротивления R и переменной емкости С. Значение переменного напряжения, подводимого к усилителю, изменяется пропорционально углу поворота оси α. Переменный ток выпрямляется блоком В и подается в линию связи через подвижную рамку уравновешивающего элемента УЭ. Балансное устройство находится в равновесии, когда наступит равенство М1 = М2, где М1— вращающий момент, создаваемый первичным измерителем; М2— вращающий момент, развиваемый уравновешивающим элементом. Вращающий момент М1пропорционален измеряемому параметру Х: М1 = К1 ∙ Х. Вращающий момент М2пропорционален току I в линии связи: М2 = К2 ∙ I Из условия равновесия находим ток: I = К1 ∙ Х /К2. 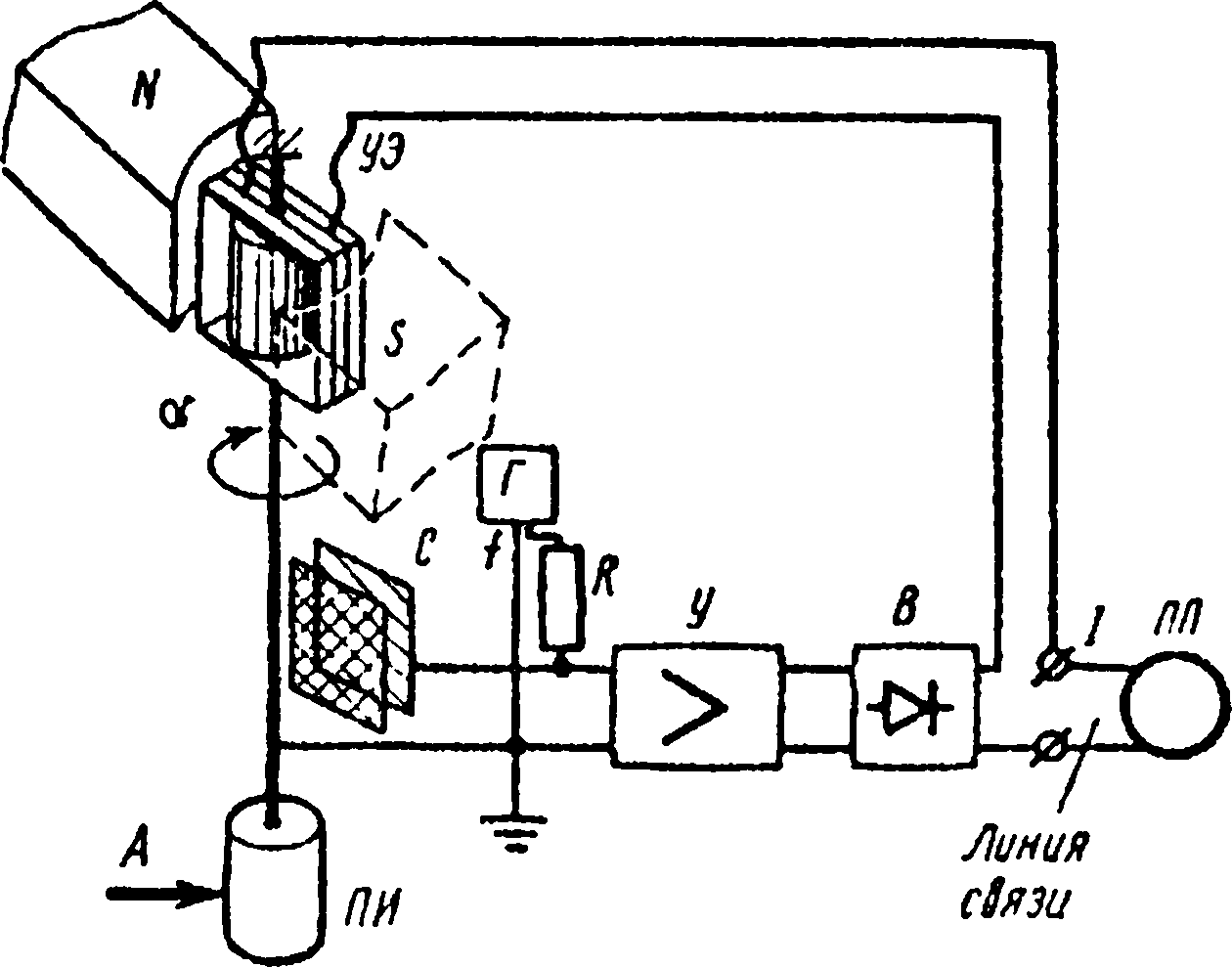 Рис. 7. Балансная система с регулированием тока емкостным элементом Если измеряемый неэлектрический параметр Х возрастает, то момент М1увеличивается. Ось начинает поворачиваться, емкость конденсатора С увеличивается. С увеличением емкости увеличивается и напряжение, подводимое к выходу усилителя У, а следовательно, и ток в линии связи. Момент М2увеличится, равновесие наступит при новых значениях М1и М2. По линии будет протекать ток, соответствующий новому значению измеряемой величины. Выпускаются балансные токовые системы телеизмерения расхода по методу переменного перепада давления, давления и уровня жидкости с помощью мембранного дифманометра и балансирного двигателя. Телеизмерительные системы дальнего действия основаны на совершенно других физических принципах. В них длина линии связи не играет большой роли и показания приборов могут передаваться на весьма большие расстояния с достаточной для практических целей точностью. В одних системах телеизмерения дальнего действия используются разные импульсы постоянного тока, в других — переменный ток различной частоты. Система телеизмерения дальнего действия с регулируемым током Погрешность систем телеизмерения дальнего действия практически не зависит от изменения параметров линии связи. Система телеизмерения дальнего действия с регулируемым током типа ТРТ-1 предназначена для передачи на расстояние величин расхода, измеряемых приборами, снабженными выходными ферродинамическими датчиками ДФ-4. В систему входят (рис. 8): первичный измеритель, снабженный выходным ферродинамическим датчиком ДФ-4; электронный преобразователь ПЭГ; линии связи ЛСВ; индикатор ИТ-1 с панелью переключений, ROC— сопротивление обратной связи; 1—2 — выводы первичной обмотки датчика к стабилизатору напряжения. 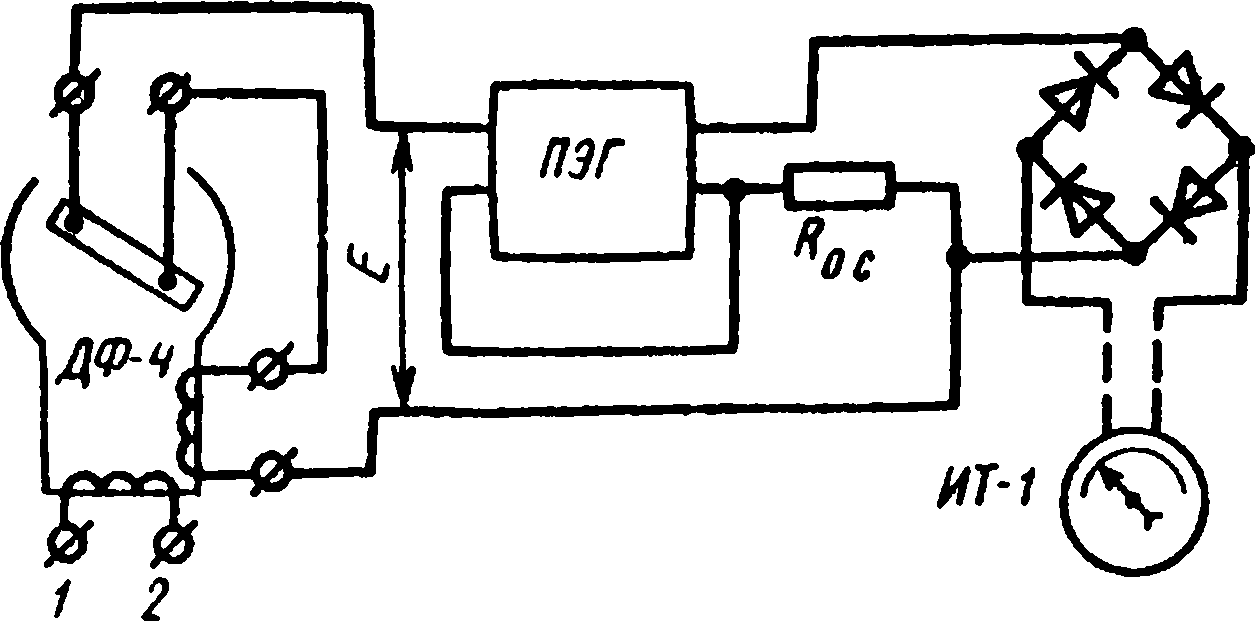 Рис. 8. Принципиальная схема системы телеизмерения дальнего действия типа ТРТ-1 С выходного ферродинамического датчика первичного измерительного прибора снимается ЭДС Е, значение которой пропорционально измеряемому значению. Эта ЭДС подается на электронный усилитель, на выходе которого включен выпрямительный мостик. Выпрямленный выходной ток усилителя Iу однозначно определяется значением ЭДС и не зависит практически от других факторов, например температуры окружающей среды и величины сопротивления линии связи. Электронный преобразователь ПЭГ включает в себя электронный усилитель, выходной трансформатор и стабилизатор напряжения. В качестве показывающего индикатора ИТ-1 используется миллиамперметр постоянного тока М-362. Шкала индикатора градуируется в единицах измеряемого параметра. В качестве линии связи может быть использована пара жил телефонного кабеля с суммарным сопротивлением обоих проводов не выше 5000 Ом, чем определяется предельное расстояние от преобразователя ПЭГ до приемника. Время-импульсные схемы телеизмерения дальнего действия Время-импульсные схемы телеизмерения дальнего действия основаны на посылке сигналов в виде импульсов определенной продолжительности или пауз между двумя импульсами (рис. 9, а). Передающее устройство ПУ системы представляет собой небольшой синхронный двигатель 1, на вал 2 которого насажены два медных полукольца 4, изолированных между собой и от вала изоляционным материалом. К полукольцам прикасаются две металлические или графитовые щетки 3 и 5. Щетка 3 неподвижна, а щетка 5 имеет кинематическую связь с измерительным элементом ИЭ. К щеткам линией связи подключается быстродействующее реле Р приемного устройства УП, построенного на базе миллиамперметра ПП магнитоэлектрической системы. При работающей системе телеизмерения синхронный двигатель непрерывно вращается С постоянной частотой. Когда щетка 5 находится в одной плоскости с щеткой 3 (как показано на рисунке), вращающиеся полукольца 4 не могут замкнуть цепь питания линии связи от сети с напряжением U1, линия будет обесточенной. С отклонением измеряемого параметра от нуля щетка 5 перемещается по полукольцу на сближение со щеткой 3. В связи с этим в линию связи посылаются импульсы продолжительностью, пропорциональной величине перемещения щетки 5 или измеряемому параметру. Чем на большее расстояние перемещается щетка 5, тем большей продолжительности становятся импульсы тока в линии связи. 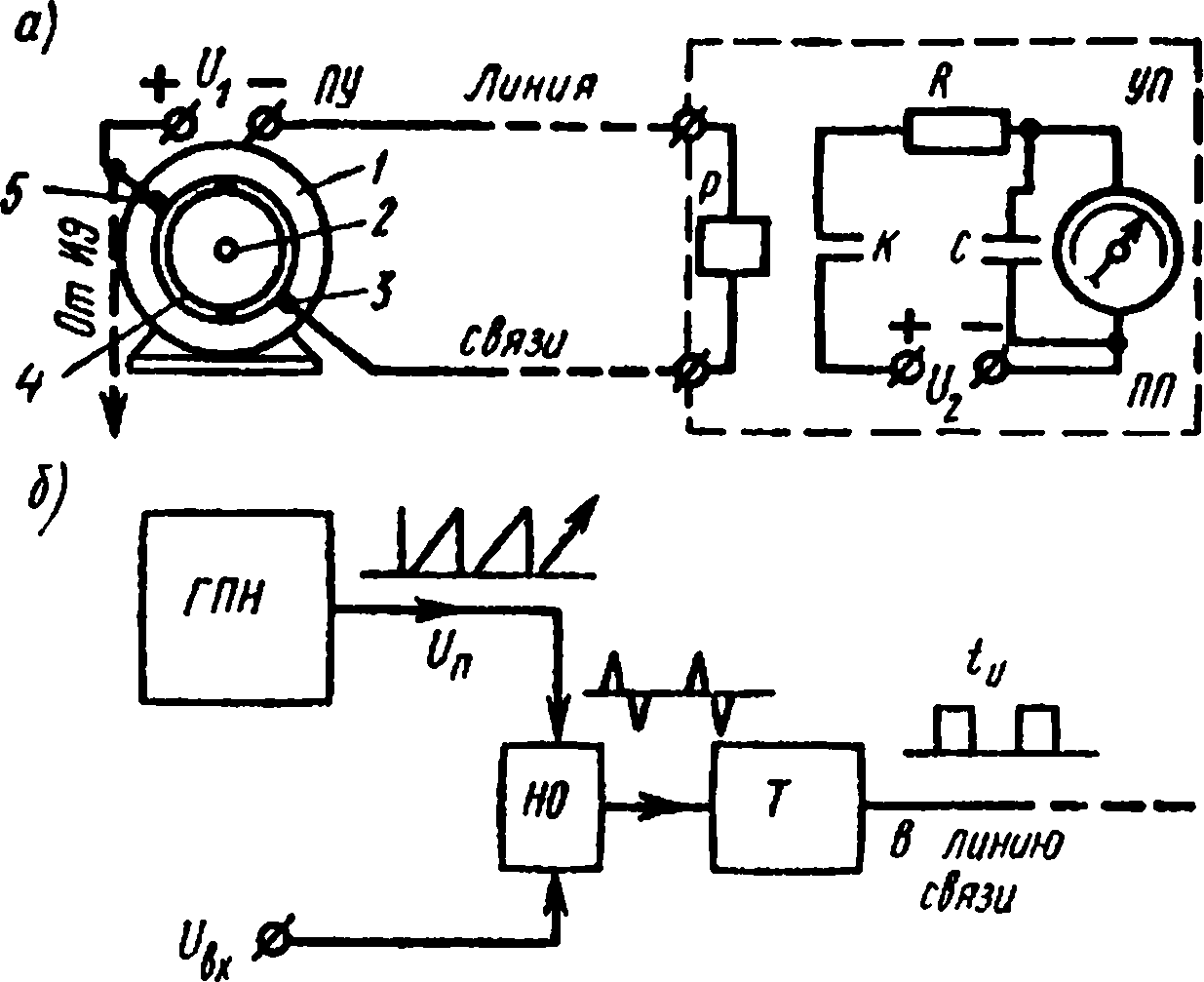 Рис. 9. Время-импульсная схема телеизмерения: а) контактная; б) бесконтактный передатчик В приемном устройстве УП работающее реле Р при замыкании контактной пары К посылает через прибор ПП импульсы тока или напряжения с такой же продолжительностью, как и в линии связи. Шкала прибора, измеряющего среднее значение тока, градуируется в единицах измеряемой величины. Сопротивление R устройства УП ограничивает ток в цепи миллиамперметра, а кон- денсатор С играет роль фильтра. Бесконтактная время-импульсная система телеизмерения с триггерным устройством На рис. 9, б показан передатчик бесконтактной электронной время-импульсной схемы телеизмерения. Входное постоянное напряжение UBXи напряжение пилообразной формы UП, создаваемое генератором ГПН, сравниваются электронным нуль-органом НО. В момент равенства напряжения UВХи UПтриггер Т посылает в линию связи импульсы прямоугольной формы t и пропорциональные UВХ. Приемники время-импульсных схем выполняются обычно как измерители коэффициента импульса. Коэффициентом импульса называется отношение длительности к длительности периода (суммы времени импульса и паузы). При большой частоте импульсных посылок и малом их периоде используются электрические приемники, при обратных условиях в качестве приемников используют электромеханические устройства. Число-импульсная схема телеизмерения дальнего действия Число-импульсная схема телеизмерения дальнего действия основана на передаче по линии связи того или другого числа импульсов постоянного тока пропорционально изменению измеряемой величины (рис. 10), например изменению уровня жидкости. 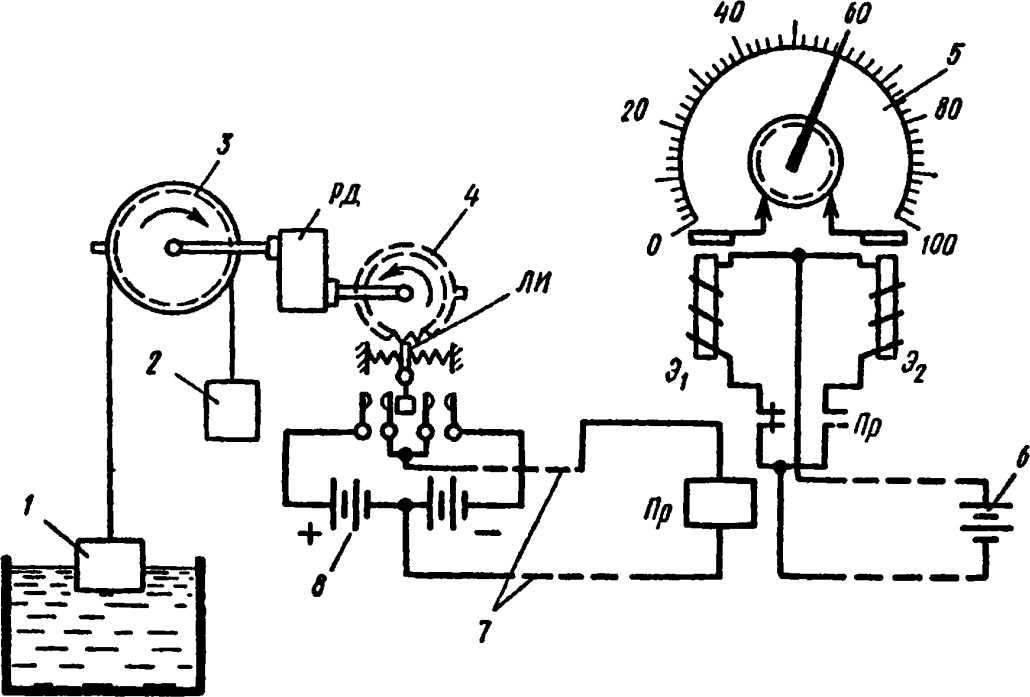 Рис. 10. Число-импульсная схема телеизмерения уровня жидкости: 1 — поплавок; 2 — груз; 3 — блок; 4 — зубчатое колесо; 5 —. указатель уровня жидкости; 6 — местная батарея; 7 — линия связи; 8 — линейная батарея; ДИ — датчик импульсов; Пр — поляризованное реле; Э1и Э2— электромагниты вращения; РД — реверсивный двигатель Изменение уровня жидкости вызывает перемещение поплавка. Связанный с ним трос приводит во вращение блок и зубчатое колесо. В зависимости от величины и направления (вверх или вниз) изменения уровня зубчатое колесо большее или меньшее число раз замыкает левые или правые контакты датчика импульсов ДИ. В линию связи при этом посылается соответствующее число положительных или отрицательных импульсов постоянного тока. В пункте приема сигналов поляризованное реле Пр замыкает источник тока 6 на один из двух электромагнитов вращения Э1или Э2, что вызывает соответствующее перемещение стрелки указателя уровня жидкости. При обрыве или замыкании в канале связи, повреждении источников питания и контактов схема будет давать ложную информацию, показывая неизменный уровень. Это основной недостаток данной схемы. Дальнейшим развитием число-импульсной схемы телеизмерения является кодоимпульсная схема. В этой схеме кодовые сигналы состоят из посылок тока разной полярности и длительности в определенных, принятых кодом комбинациях. Частотно-импульсная схема телеизмерения Частотно-импульсная схема телеизмерения основана на передаче сигналов, частота которых пропорциональна измеряемой величине. В схему входит генератор, установленный на приемной стороне. В качестве передатчиков можно применить электронные генераторы незатухающих колебаний и электромеханические генераторы. В простейшей схеме частотно-импульсной системы с электромеханическим генератором используется механизм электросчетчика. На ось электросчетчика насаживается цилиндрическая втулка с кольцом, пластинкой и щетками, которые являются прерывателем тока электрической ба- тареи. За каждый оборот оси счетчика в линию посылается один импульс тока. В зависимости от числа оборотов счетчика импульсы в линию посылаются с различной частотой. Через катушки счетчика, пользуясь электрическими датчиками, можно пропускать ток, пропорциональный значениям любой измеряемой величины. На другом конце линии устанавливается измеритель частоты импульсов, по показаниям которого судят об измеряемой величине. СИСТЕМЫ ТЕЛЕУПРАВЛЕНИЯ Особенностью систем телеуправления, является дистанционная передача управляющих сигналов на расстояние по линии связи. Системы телеуправления обычно снабжаются обратной сигнализацией, осуществляемой по той же линии связи и подтверждающей выполнение объектами посылаемых им приказов, а также элементами, защищающими управляемые объекты от вы- полнения так называемых «ложных», случайных приказов. Любая система телеуправления состоит в общем случае из ряда основных элементов (рис. 11): Управляющее устройство служит для подачи сигнала (приказа) и восприятия обратных сигналов от управляемых объектов. Распределитель служит для последовательного подключения какой-либо одной электриче- ской цепи (линии связи) к ряду других цепей (органов управления). В некоторых системах распределитель дополняется шифратором, который кодирует сигнал в виде, удобном для передачи на объект управления. Передатчик служит для посылки в линию связи сигналов; Линия связи передает посылаемые сигналы на требуемое расстояние; Приемник служит для приема сигналов и передачи их в избиратель; Избиратель выделяет из большого числа передаваемых сигналов тот, который необходимо передать на управляемый объект. 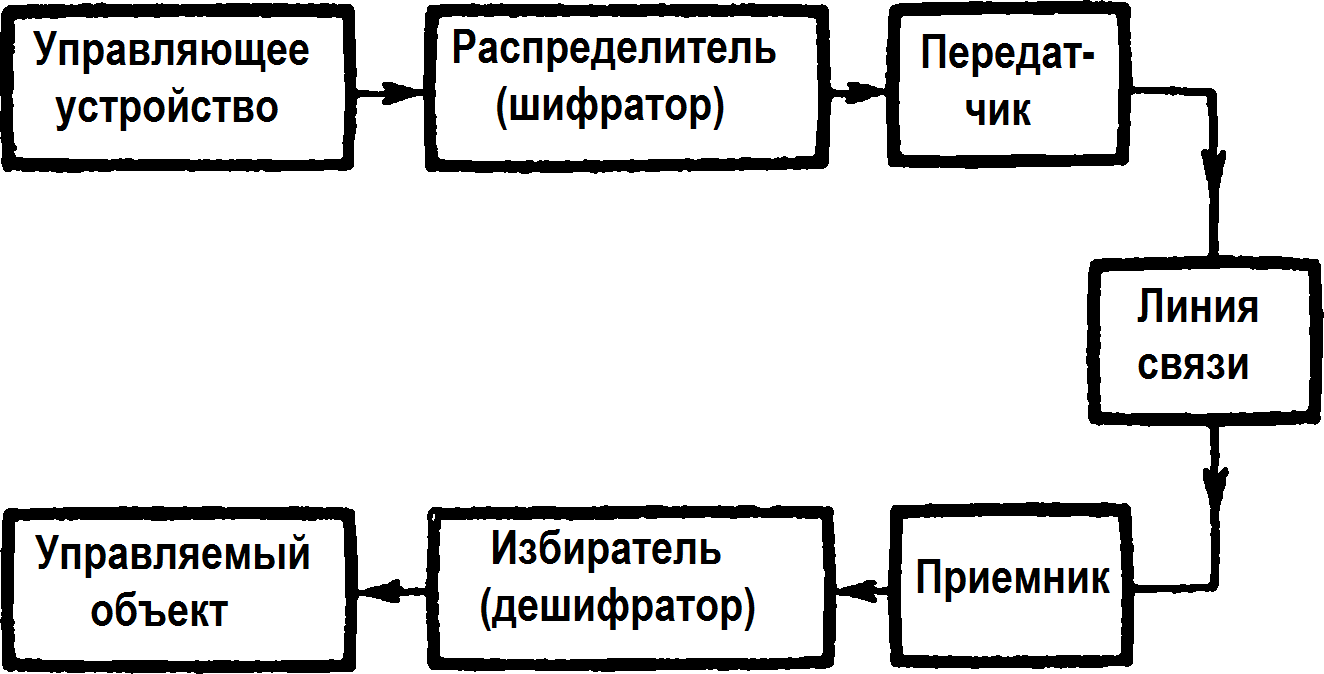 Рис. 11. Функциональная схема системы телеуправления Избирательностью называется способность систем телеуправления выбирать из большого количества посылаемых сигналов один какой-то сигнал определенного вида, требующийся для управления данным объектом. Существующие устройства телеуправления по виду раздельной передачи сигналов или методу избирания и устройству линий связи можно разделить на три группы. устройства телеуправления с электрическим разделением сигналов, или многопроводные системы; малопроводные системы с частотным разделением сигналов; малопроводные системы с временным разделением сигналов. В многопроводных системах телеуправления (рис. 12) несколько различных сигналов посылается по нескольким линиям связи одновременно. При наличии «п» самостоятельных проводов (кроме общего провода питания) по многопроводной системе можно передать сигналов N - K∙n (где К — число импульсных приз- наков, обычно К = 2...4). В качестве импульсных признаков принимаются посылки разной полярности, частоты, продолжительности и т. п. В многопроводных системах передача всех импульсов может происходить одновременно, так как для каждого импульса используется отдельная электрическая цепь. Для разделения импульсов управления и сигнализации применяется амплитудный признак, при котором ток управления в несколько раз превышает ток сигнализации. 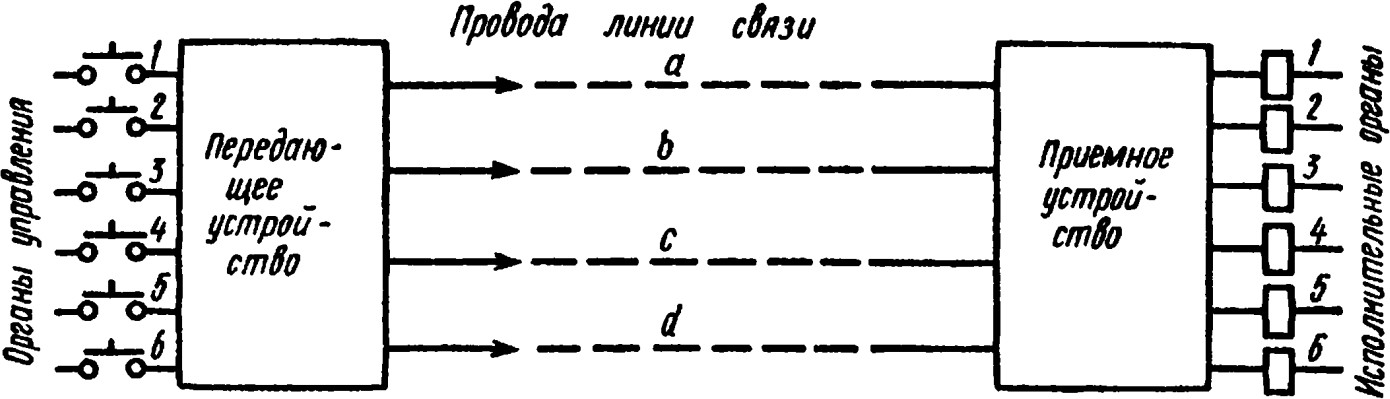 Их основным достоинством является малое время, необходимое на передачу каждого отдельного сигнала, так как сигналы могут передаваться параллельно. Многопроводные системы ТУ-ТС обычно применяют при сравнительно небольших расстояниях между пунктом управления и объектом управления. Их основным достоинством является малое время, необходимое на передачу каждого отдельного сигнала, так как сигналы могут передаваться параллельно. Многопроводные системы ТУ-ТС обычно применяют при сравнительно небольших расстояниях между пунктом управления и объектом управления.Рис. 12. Принципиальная схема многопроводного устройства телеуправления с разделением сигналов по электрическим цепям В малопроводных системах телеуправления сигналы посылаются последовательно по времени (поочередно). Основным достоинством этих систем является экономичность вследствие сокращения числа линий связи. 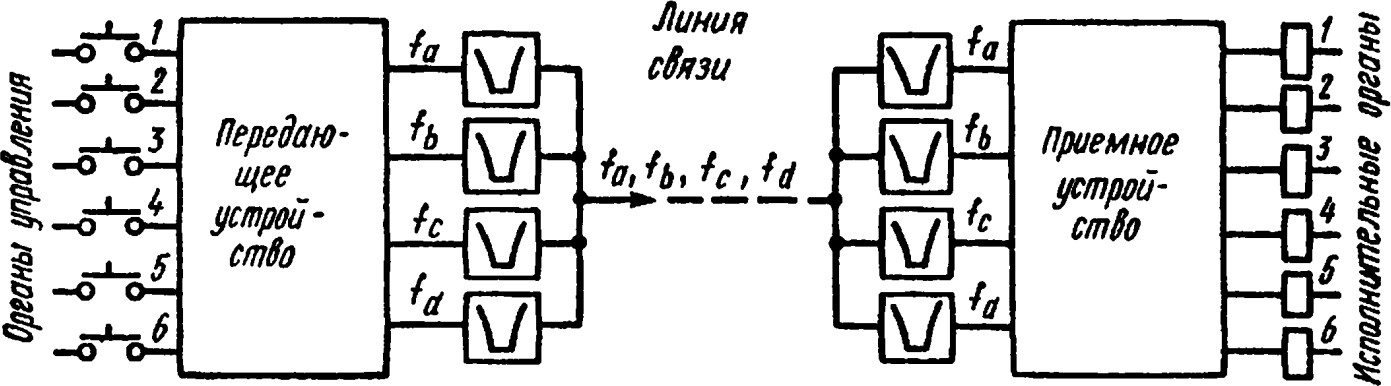 Малопроводные системы ТУ-ТС с частотным разделением сигналов (рис. 13) обеспечивают передачу различных сигналов по одной линии связи за счет использования посылок тока разной частоты. В передающей части этих систем имеется генератор синусоидальных колебаний разной частоты, в приемной части сигналы разделяются с помощью полосовых фильтров. Иногда для увеличения числа передаваемых сигналов вводят передачу каждого сигнала двумя частотами с соответствующей их комбинацией. Малопроводные системы ТУ-ТС с частотным разделением сигналов (рис. 13) обеспечивают передачу различных сигналов по одной линии связи за счет использования посылок тока разной частоты. В передающей части этих систем имеется генератор синусоидальных колебаний разной частоты, в приемной части сигналы разделяются с помощью полосовых фильтров. Иногда для увеличения числа передаваемых сигналов вводят передачу каждого сигнала двумя частотами с соответствующей их комбинацией.Рис. 13. Принципиальная схема малопроводного устройства телеуправления с частотным разделением сигналов Малопроводные системы ТУ-ТС с временным разделением сигналов (рис. 14) осуществляют передачу сигналов по одной линии связи в виде поочередной посылки импульсов с помощью распределителей. Два синхронно работающих распределителя РIи РIIодновременно подключают линию связи к соответствующим управляющим и управляемым элементам схемы. В качестве распределителей в системах телеуправления используются переключатели, приводимые в действие электродвигателями, электромагнитные шаговые распределители, релейные, катодные и бесконтактные переключатели. Электромагнитные шаговые распределители представляют собой контактное устройство, в котором перемещение щетки по контактам происходит последовательно с помощью электромагнитного привода. Шаговые распределители получили широкое распространение в системах телеуправления, так как они просты в устройстве и имеют небольшую стоимость. Недостатками их являются относительно невысокая скорость переключения, наличие вращающихся частей. 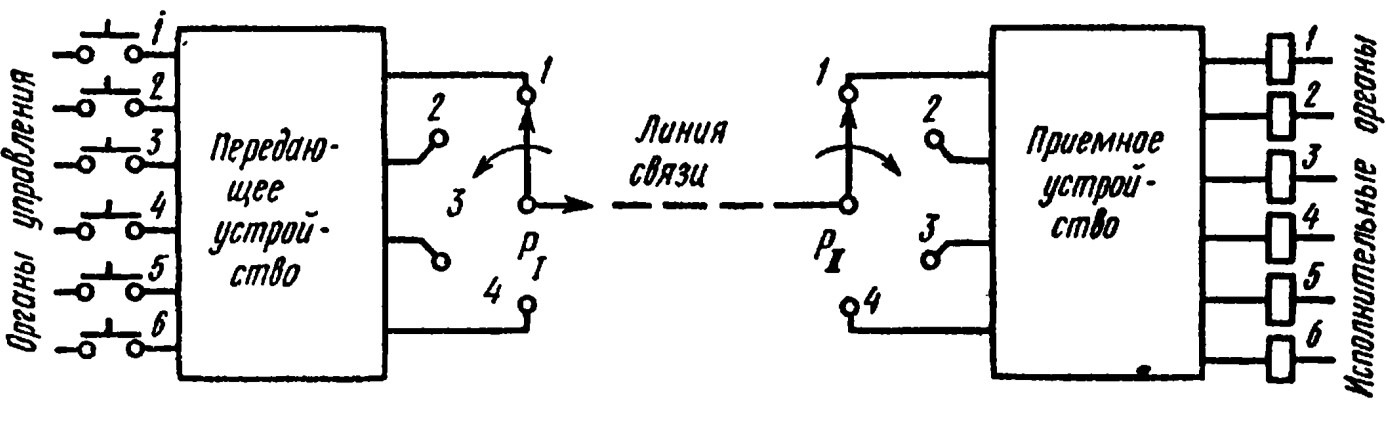 Рис. 14. Принципиальная схема малопроводного устройства телеуправления с временным разделением сигналов Релейные распределители представляют собой цепочку реле, последовательно переключающих свои контакты при поступлении импульсов. Контакты каждого реле играют роль ламелей, т. е. замыкают соответствующие цепи переключения. Бесконтактные переключатели представляют собой цепочку бесконтактных элементов, последовательно переключающихся при поступлении очередного импульса. Передача сигналов телемеханики может осуществляться не только по проводам, но и с использованием радиоволн. В этом случае возникает возможность управления объектами на основе принципов радиотелемеханики. |