ПМ ЭиЭМП. Пример 1. Склады играют одну из важнейших ролей в народном хозяйстве России
 Скачать 341.85 Kb. Скачать 341.85 Kb.
|

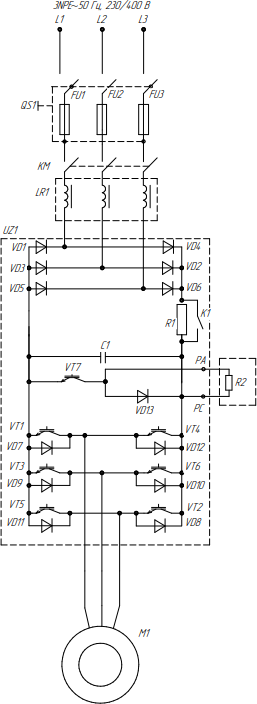 Рисунок 3.1 – Электрическая схема силовых цепей Описание элементов силовой схемы преобразователя частоты: LR1– Сетевой реактор, защищает схему от помех и уменьшает скорость нарастания тока при коротких замыканиях; (VD1⋯VD6) – Неуправляемый мостовой выпрямитель, реализованный на диодах; Автономный инвертор напряжения с широтно-импульсной модуляцией (ШИМ) - состоит из 6 IGBT транзисторов (VT1⋯VT6) и 6 обратных диодов (VD7⋯VD12). Диоды предназначены для обеспечения циркуляции реактивной энергии между обмотками АД и конденсатором C1. С1 – Фильтр, который сглаживает пульсации выпрямленного напряжения и служит устройством для накопления и отдачи энергии, что необходимо для обеспечения циркуляции реактивной мощности между обмотками АД и фильтром. Наличие конденсатора C1 придает ПЧ свойство источника напряжения, позволяющего формировать, при использовании ШИМ, близкую к синусоидальной форму кривой тока в статоре двигателя. R2 – Разрядное сопротивление, которое подключается транзистором VT1 во время торможения, и на котором рассеивается энергия торможения. Фильтр 𝑑𝑈/𝑑𝑡 на выходе преобразователя частоты не требуется, так как имеется запас по мощности ПЧ по отношению к используемому двигателю, расстоянием между двигателем и преобразователем частоты пренебрежимо мало, а также в целях удешевления конструкции. Анализ динамических свойств электромеханического преобразователя, как объекта управления Синхронная частота и скорость вращения поля (синхронная скорость): 𝑛0 = 1000 об/мин 𝜔 = 𝜋 ⋅ 𝑛0 = 3.14 ⋅ 1000 = 104,7 рад/с (4.1)   0 30 30 Номинальное скольжение двигателя: 𝑠 = 𝜔0 − 𝜔𝑁 = 104,7 − 91,58 = 0,125 (4.2)   𝑁 𝜔0 104,7 Критическое скольжение двигателя:  𝜆М + √𝜆2 − 1 + 2 ⋅ 𝑠𝑁(𝜆М − 1) М 𝑠к = 𝑠𝑁 1 − 2𝑠𝑁(𝜆М − 1)  2,628 + √2,6282 − 1 + 2 ⋅ 0,125(2,628 − 1) (4.3)  𝑠к = 0,125 𝑠к = 0,1251 − 2 ⋅ 0,125(2,628 − 1) = 1,08 Для анализа динамических свойств электродвигателя принимается: Привод работает на линейном участке механической характеристики. Между электродвигателем и механизмом существует абсолютно жёсткая механическая связь. Двигатель питается от преобразователя частоты, который обеспечивает постоянство магнитного потока. Электропривод работает при малых отклонениях от точки разложения. При таких допущениях, можно считать, что рассматривается одномассовая система, которая описывается следующей системой уравнений: 𝑀(𝑇э𝑝 + 1) = 𝛽(𝜔0 − 𝜔) { М – момент двигателя 𝑀 − 𝑀𝐶 = 𝐽Σ 𝑑𝜔  𝑑𝑡 (4.4) МС – момент статической нагрузки JΣ – суммарный момент инерции Электромагнитная постоянная времени: 1 к ТЭ = 2 ⋅ 𝜋 ⋅ 𝑓 ⋅ 𝑠 1  = = 0,0029 с (4.5) = = 0,0029 с (4.5)2 ⋅ 3,14 ⋅ 50 ⋅ 1,08 Модуль статической жёсткости: 𝑑𝑀  𝛽 = 𝑑𝜔 = 𝛽 = 𝑑𝜔 =𝑑𝑠 𝑑𝜔 𝑑𝑀 ⋅ 𝑑𝑠(4.6) 𝑀 = 2 ⋅ 𝑀𝑚𝑎𝑥 (4.7) 𝑠 𝑠к + 𝑠к  𝑠 𝑠Так как принято, что привод работает на линейном участке характеристики и 𝑠 < (0,3 … 0,4)𝑠к, то можно считать, что s/sк пренебрежимо мало, тогда:  𝑀 = 2𝑀𝑚𝑎𝑥𝑠 𝑀 = 2𝑀𝑚𝑎𝑥𝑠𝑠к Таким образом, модуль статической жёсткости равен: (4.8)   𝛽 = 2𝑀𝑚𝑎𝑥 = 2 ⋅ 41 𝛽 = 2𝑀𝑚𝑎𝑥 = 2 ⋅ 41= 0,725 (4.9) 𝑠к ⋅ 𝜔0 1,08 ⋅ 104,7 Характер переходного процесса определяется отношением электромеханической постоянной времени (ТМ) и электромагнитной постоянной времени (ТЭ). Электромеханическая постоянная времени:  𝑇 = 𝐽Σ = 0,453 𝑇 = 𝐽Σ = 0,453 = 0,625 с (4.10) 𝑀 𝛽 0,725 где 𝐽Σ – средний момент инерции, приведенный к валу двигателя Отношение постоянных времён:  𝑚 = 𝑇𝑀 = 0,625 𝑚 = 𝑇𝑀 = 0,625= 215,5 > 4 (4.11) 𝑇Э 0,0029 Так как отношение электромеханической постоянной времени (ТМ) и электромагнитной постоянной времени (ТЭ) больше четырёх, то переходный процесс будет иметь монотонный характер. Ниже, на рисунке 4.1 представлена схема моделирования процессов, собранная в MATLAB/Simulink. 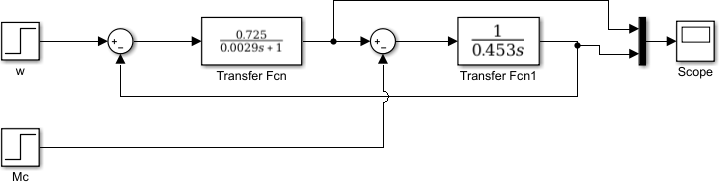 Рисунок 4.1 – Схема моделирования процессов На рисунке 4.2 показаны переходные процессы по управляющему и возмущающему воздействию. Управляющее воздействие ωN(t)=1(t)⋅1 подобрано так, чтобы броски момента не превышали максимальный момент двигателя. Возмущающее воздействие MC(t)= 1(t)⋅ 1 выбрано так, чтобы примерно соответствовало номинальному моменту сопротивления электропривода.  Рисунок 4.2 – Переходный процесс скорости и момента по управляющему и возмущающему воздействиям, ωN(t)=1(t)⋅1, MC(t)= 1(t)⋅ 1 ЗАКЛЮЧЕНИЕ В проекте по модулю был выполнен расчет механизма горизонтального перемещения крана – штабелера. На основании технического задания и технологического описания процессов работы данного механизма были рассчитаны основные параметры электропривода: статические и динамические моменты, скорости и ускорения, моменты инерции. Были построены тахограмма и нагрузочная диаграмма механизма. На основании нагрузочной диаграммы и режима работы электропривода была проведена проверка асинхронного двигателя ДМТКF 011-6 по нагреву и перегрузочной способности. Для управления двигателем был выбран преобразователь частоты модели Sinamics G120 фирмы «Siemens». СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ 1.Электромеханические и тепловые режимы асинхронных двигателей в системах частотного управления: учеб. пособие / Р.Т.Шрейнер, А.В.Костылев, В.К.Кривовяз, С.И.Шилин. Под ред.проф. д.т.н. Р.Т.Шрейнера – Екатеринбург: ГОУ ВПО «Рос.гос.проф-пед.ун-т», 2008 2.ЭЛЕКТРИЧЕСКИЙ ПРИВОД Курс лекций: Учебное электронное текстовое издание / А.В. Кириллов, Д.П. Степанюк, Н.Д. Ясенев ПРОЕКТ ПО МОДУЛЮ «Электрические и электромеханические преобразователи»: Методические указания / М. Ю. Бородин, А. В. Кириллов, А. В. Костылев, В. П. Метельков Каталоги промышленного электрооборудования [Электронные ресурсы] URL: esbk.ru; simatic - market . ru; |