РГР. РГР Электрические машины. Содержание 1 Двигатели постоянного ток3 2 Асинхронные двигатели8 Список использованных источников14 1 Двигатели постоянного тока
 Скачать 129 Kb. Скачать 129 Kb.
|

|
Министерство науки и высшего образования Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего образования «Комсомольский-на-Амуре государственный университет» Факультет энергетики и управления Кафедра «Электромеханика» РАСЧЕТНО-ГРАФИЧЕСКАЯ РАБОТА по дисциплине «Электрические машины» Двигатели постоянного тока, асинхронные двигатели. Вариант № 7 Студент группы 0ПЭб-1 П.А. Овчаренко Преподаватель Н.Н. Мельникова 2022 Содержание 1 Двигатели постоянного ток3 2 Асинхронные двигатели8 Список использованных источников14 1 Двигатели постоянного тока Для двигателя постоянного тока серии 2П параллельного возбуждения заданы номинальные параметры: номинальное напряжение  , мощность , мощность  , частота вращения , частота вращения  , коэффициент полезного действия , коэффициент полезного действия  , ток возбуждения , ток возбуждения  , сопротивление обмотки якоря , сопротивление обмотки якоря  , численные значения которых приведены в таблице 1. , численные значения которых приведены в таблице 1.Таблица 1 – Исходные данные двигателя постоянного тока
Требования: 1) начертить схему подключения двигателя к источнику постоянного напряжения с указанием приборов для измерения токов и напряжений; 2) определить противо-ЭДС в обмотке якоря; 3) определить номинальный момент на валу двигателя; 4) определить пределы изменения частоты вращения двигателя при изменении величины добавочного сопротивления в цепи якоря  от 0 до от 0 до  при постоянном моменте сопротивления на валу при постоянном моменте сопротивления на валу  ; 5) построить естественную и искусственную (при ; 5) построить естественную и искусственную (при  ) механические характеристики. ) механические характеристики.1) начертить схему подключения двигателя к источнику постоянного напряжения с указанием приборов для измерения токов и напряжений. 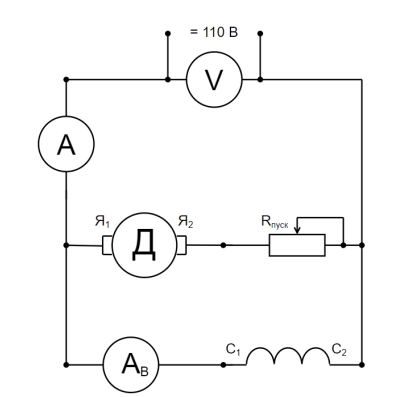 Рисунок 1 – Схема двигателя постоянного тока параллельного возбуждения 2) определить противо-ЭДС в обмотке якоря. Для определения противо-ЭДС в обмотке якоря можно воспользоваться вторым законом Кирхгофа:  где  напряжение на зажимах двигателя, В; напряжение на зажимах двигателя, В;  противо-ЭДС якоря, В; противо-ЭДС якоря, В;  ток якоря, А; ток якоря, А;  сопротивление обмотки якоря, Ом. сопротивление обмотки якоря, Ом.Их этого уравнения следует, что противо-ЭДС в обмотке якоря определится:  где ток якоря можно определить по первому закону Кирхгофа  где  ток, потребляемый двигателем из сети в номинальном режиме, А. ток, потребляемый двигателем из сети в номинальном режиме, А.Ток, потребляемый двигателем из сети, вычисляется из формулы потребляемой мощности, котороя определяется по коэффициенту полезного действия выражениями:   Рассчитаем ток, потребляемый двигателем из сети по формуле:   Рассчитаем ток якоря:  Подставим полученные значения в формулу противо-ЭДС в обмотке якоря:  3) определить номинальный момент на валу двигателя. Номинальный вращающий момент на валу двигателя можно записать в виде уравнения:  где  номинальный вращающий момент, Нм; номинальный вращающий момент, Нм;  номинальная частота вращения, об/мин. номинальная частота вращения, об/мин. 4) определить пределы изменения частоты вращения двигателя при изменении величины добавочного сопротивления в цепи якоря от 0 до при постоянном моменте сопротивления на валу .Для определения частоты вращения двигателя при различных значениях добавочного сопротивления в цепи якоря и заданном статическом моменте сопротивления воспользуемся формулой:  где M – вращающий момент электродвигателя, Н  м, определяющийся выражением: м, определяющийся выражением: при : параметр  определяется из уравнения частоты вращения двигателя для номинального режима: определяется из уравнения частоты вращения двигателя для номинального режима:  а параметр  определяется из соотношения: определяется из соотношения:  Тогда частота вращения двигателя при  и , выраженном в ньютоно-метрах, определится: и , выраженном в ньютоно-метрах, определится: а частота двигателя при   5) построить естественную и искусственную (при ) механические характеристики.Так как выражения для механических характеристик представляют уравнения прямых линий, то для построения этих характеристик достаточно знать координаты двух точек, например, для режима холостого хода М = 0:   Для номинального режима при  а при а при  . .Механические характеристики для заданных параметров двигателя приводятся на рисунке 2. 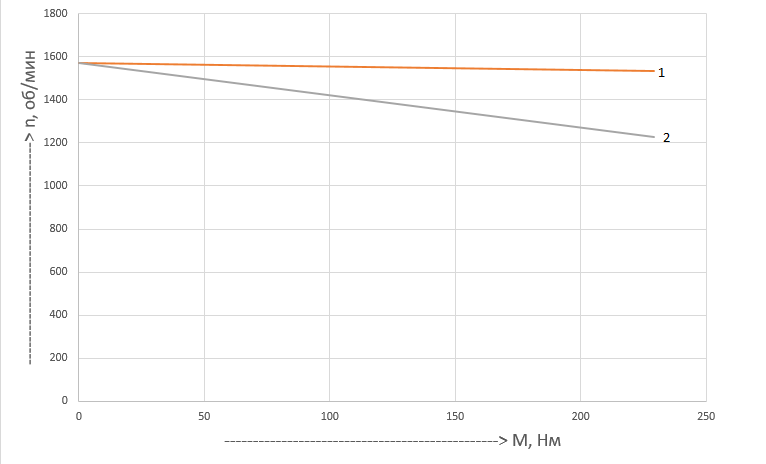 Рисунок 2 – Механические характеристики: 1 – естественная, 2 – искусственная. Характеристика показывает, что с увеличением добавочного сопротивления в цепи якоря жесткость механической характеристики уменьшается. 2 Асинхронные двигатели Трехфазный асинхронный двигатель с короткозамкнутым ротором серии 4А питается от сети с линейным напряжением  . Известны следующие параметры двигателя: номинальная мощность . Известны следующие параметры двигателя: номинальная мощность  , частота вращения , коэффициент полезного действия , коэффициент мощности , частота вращения , коэффициент полезного действия , коэффициент мощности  , при номинальной нагрузке, кратность максимального момента , при номинальной нагрузке, кратность максимального момента  и кратность пускового тока и кратность пускового тока  . Фазное номинальное напряжение обмотки статора . Фазное номинальное напряжение обмотки статора  . Численные значения вышеприведенных параметров приводятся в таблице 2. . Численные значения вышеприведенных параметров приводятся в таблице 2.Таблица 2 – Исходные данные асинхронного двигателя
Требуется: 1) начертить схему подключения асинхронного двигателя к трехфазной сети; 2) определить способ соединения обмотки статора; 3) определить фазные и линейные токи двигателя; 4) определить число пар полюсов обмотки статора; 5) определить номинальное скольжение и номинальный момент; 6).определить критическое скольжение; 7) определить значение пускового тока; 8) определить значение вращающего момента, развиваемого двигателем при скольженьях: 0,05; 0,1; 0,2; 0,4; 0,6; 0,8;1,0; 9) построить график механической характеристики  асинхронного двигателя. асинхронного двигателя.1) начертить схему подключения асинхронного двигателя к трехфазной сети. 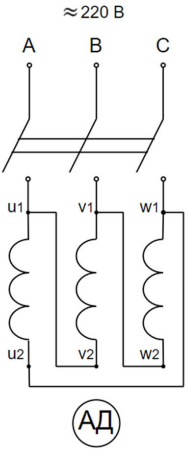 Рисунок 3 – Схема подключения к трёхфазной сети асинхронного двигателя с обмоткой статора, соединённой по схеме в треугольник 2) определить способ соединения обмотки статора; Способ соединения обмотки статора асинхронного двигателя определяется величиной линейного напряжения сети. При напряжении в сети 380 В обмотка соединяется по схеме в звезду, а при напряжении 220 В соединяется по схеме в треугольник. В данном варианте линейное напряжение равно 220 В, соответственно обмотка соединяется в треугольник. 3) определить фазные и линейные токи двигателя. Активная мощность, потребляемая двигателем из сети, определяется по формуле:   Ток в фазе обмотки статора асинхронного двигателя:   Линейный ток, потребляемый двигателем из сети, при соединении обмотки в треугольник определяется соотношением:   4) определить число пар полюсов обмотки статора. При заданной частоте вращения двигателя 1419 об/мин частота вращения поля составляет 1500 об/мин, а число пар полюсов определяется формулой:   5) определить номинальное скольжение и номинальный момент. Номинальное скольжение двигателя определяется по формуле:   Полезный момент на валу двигателя при номинальной нагрузке определяется выражением:   6) определить критическое скольжение. Критическое скольжение определяется из формулы Клосса для номинального режима работы. После преобразования этого выражения получим квадратное уравнение, в котором неизвестным является критическое скольжение:  Максимальный момент двигателя определяется по формуле:   Решением этого квадратного уравнения являются два корня:  где значение подкоренного выражения определяется уравнением:   Тогда критические скольжения примут значения:   7) определить значение пускового тока Линейный ток при пуске двигателя определяется из заданного соотношения этих токов  к номинальному: к номинальному:  Фазный ток при пуске двигателя определяется:   При соединении обмотки статора асинхронного двигателя по схеме в треугольник при номинальном токе 8,7 А в режиме пуска линейный ток возрастает до 43,5 А, а фазный ток – до 25 А. 8) определить значение вращающего момента, развиваемого двигателем при скольженьях: 0,05; 0,1; 0,2; 0,4; 0,6; 0,8;1,0. Выбираем большее значение корня (0,31). Вращающий момент асинхронного двигателя при скольжении S =0,05 определяется на основании формулы Клосса:   а частота вращения ротора при этом скольжении:   Вращающие моменты и обороты двигателя для других заданных скольжений определяются аналогичным образом, а результаты расчета сведены в таблице 3. Таблица 3 - Вращающий момент и частота вращения двигателя
9) построить график механической характеристики асинхронного двигателя. По результатам расчетов, представленных в таблице 3, строим график механической характеристики (рисунок 4) асинхронного двигателя .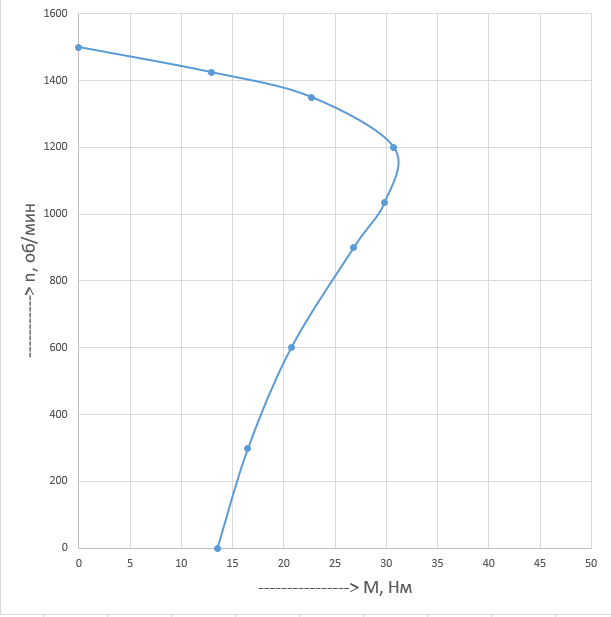 Рисунок 4 - График механической характеристики асинхронного двигателя Список использованных источников 1. Проектирование электрических машин: Учеб. пособие для вузов / И.П. Копылов, Ф.А. Горяинов, Б.К. Клоков и др.; под ред. И.П. Копылова. – М. – Энергия, 1980. – 496 с. 2. Асинхронные двигатели: методические указания к курсовому проекту / Сост. О.Г. Никифоров, В.М. Кузьмин. – Комсомольск-на-Амуре: КнАПИ, 1989. – 16 с. 3. Расчет рабочих характеристик асинхронных двигателей: методические указания к курсовому проекту / Сост. В.А. Денисов, А.А. Скрипилев, Н.Н.Мельникова. – Комсомольск-на-Амуре: КнАПИ, 1986. 31 с |

 , об/мин
, об/мин