Курсовая Спутниковые системы навигации. Спутниковые системы навигации
 Скачать 0.52 Mb. Скачать 0.52 Mb.
|

1 2
20000 км. НКА системы GPS проходили ряд усовершенствований, которые сказывались на их характеристиках в целом. В таблицеприведены краткие характеристики космических аппаратов, используемых в системе. 17 000 км над поверхностью Земли. Скорость их движения весьма велика, однако параметры орбиты и их текущее местонахождение с высокой точностью известны бортовым компьютерам. Важной частью любого GPS-навигатора является обычный приемник, работающий на фиксированной частоте и постоянно «прослушивающий» сигналы, передаваемые этими спутниками. Каждый из спутников постоянно излучает радиосигнал, в котором содержатся данные о параметрах его орбиты, состоянии бортового оборудования и о точном времени. Изо всей этой информации данные о точном бортовом времени являются наиболее важными: GPS-приемник с помощью встроенного процессора вычисляет промежуток времени между посылкой и получением сигнала, затем умножает его на скорость распространения радиоволн и т.о. узнает расстояние между спутником и приемником.3.1 Нестабильность часов приемника Из описанного выше принципа видно, что для определения местоположения достаточно поймать сигналы от двух спутников и построить две пересекающиеся прямые. Однако на практике точность такого метода была бы недостаточной из-за наличия ошибки часов приемника. Дело в том, что спутники, находящиеся на орбите, имеют на борту очень точные и, естественно, дорогостоящие атомные часы. Что же касается GPS-приемников, особенно бытовых, то использование таких часов было бы неоправдано в смысле габаритов и стоимости. Это было одной из серьезных проблем, с которыми столкнулись разработчики – ведь неточность хода часов всего в одну тысячную секунды приводила бы к ошибке более 250 км! Для решения этой проблемы и для возможности использования в GPS-приемниках обычных кварцевых часов (аналогичных тем, которые используются в быту) было предложено использовать не два, а три реперных ориентира, т.е. три пересекающиеся прямые. Как же это работает? Предположим, что часы GPS-радиоприемника немного спешат, т.е. измеренное время прохождения радиоволн будет больше реального. Это означает, что обе расчитанные линии, и, следовательно, точка их пересечения будут находиться на большем расстоянии от ориентиров (спутников), чем на самом деле. Если же часы отстают, то точка пересечения переместится ближе к спутникам. Возмем теперь третий ориентир (спутник). Легко видеть, что пересечение трех линий даст нам треугольник, размеры и положение которого могут меняться в зависимости от хода часов. Более того, учитывая, что неточность часов для всех трех сигналов будет практически одинаковой, можно автоматически подобрать такую величину коррекции, которая обеспечит пересечение всех трех линий в одной искомой точке. 3.2 Принцип действия GPS Принцип действия спутниковой GPS навигации основан на определении расстояния от текущего положения до группы спутников. Точное местоположение GPS спутников известно из данных эфемерид и альманаха, передаваемых в навигационных сообщениях. Зная расстояние до трех спутников, можно определить текущее местоположение, как точку пересечение трёх окружностей. Расстояние до спутников определяется простым уравнением R = t × c, где t – время распространения радиосигнала от спутника до наблюдателя, а с – постоянная величина, равная скорости света. Соответственно, зная время, за которое сигнал дошел от спутника до GPS приемника и, умножив ее на скорость света, можно определить расстояние.  Чтобы определить момент, в который сигнал был «отправлен» со спутника, навигационное сообщение модулируется «псевдошумовым» PRN-кодом, соответствующим номеру спутника. Аналогичная последовательность генерируется в GPS приемнике в строгой временной синхронизации с кодом спутника. Принятый со спутника код сравнивается с кодом приемника, и определяется «как давно» в приемнике была сгенерирована схожая последовательность. Выявленный таким образом сдвиг одного кода по отношению к другому будет соответствовать времени прохождения сигналом расстояния от спутника до приемника. Преимуществом кодовых посылок является то, что измерения временного сдвига могут быть проведены в любой момент времени. Стоит отметить, что для точного вычисления расстояния часы GPS приемника и GPS спутника должны быть синхронизированы с высокой точностью. Потому что отличие даже в несколько микросекунд приводят к ошибке в несколько десятков километров, а это в свою очередь вносит погрешность в вычисление позиции. Но если на GPS спутниках установлены атомные часы, имеющие очень высокую точность и стоимость которых составляет несколько сотен тысяч долларов, то в обычных GPS навигаторах использование таких дорогих источников частоты просто невозможно. В GPS навигаторах используются недорогие кварцевые генераторы, которые имеют существенно меньшую точность. Поэтому для вычисления «уходов» кварца при решении навигационной задачи используются измерения 4-го спутника. Фактически, получается задача с 4-мя неизвестными – координатами X, Y, Z и временем T. Именно по этой причине измеренное расстояние до спутников называют «псевдодальностью», подразумевая, что оно содержит ошибку связанную с неточностью часов. В настоящее время, многоканальные GPS навигаторы одновременно отслеживают до 8–10 спутников, что позволяет быстро решить большинство неоднозначностей. Информацию о местоположении спутников GPS приемники получают из передаваемых в навигационных сообщений данных альманаха и эфемерид. Альманах содержит информацию о расположение спутников «на небе», что позволяет при очередном включении GPS прибора значительно сузить секторы поиска навигационного сигнала и уменьшить время его «захвата». Точные координаты спутников вычисляются на основании данных эфемерид. В отличие от альманаха, спутник передает только данные «своих» эфемерид, поэтому для его использования в подсчете позиции, GPS приемник должен получить полное навигационное сообщение. Ошибки передачи, связанные с «плохими» окружающими условиями, могут существенно увеличить время фиксации позиции. Наличие в памяти данных альманаха и эфемерид позволяет GPS приемнику определять позицию за 1–2 секунды. Этот режим называется «горячим»стартом. Геометрический фактор определяет относительное расположение GPS приемника и спутников, используемых в подсчете позиции. Его величина влияет на точность определения позиции. Если все спутники расположены в одном направлении от GPS приемника, то площадь пересечения всех окружностей будет достаточно большой. Эта площадь характеризует величину неопределенности измерений, влияющих на точность подсчёта и позиции .  В случае, когда спутники расположены «вокруг» GPS приемника, область пересечений окружностей и соответственно величина неопределённостей умньшаются . 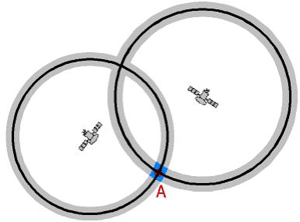 3.3 Точность системы Учитывая вышесказанное, мы видим, что для устранения нестабильности хода часов приемника и определения точного местоположения в двумерном пространстве (т.е. по широте и долготе) нам необходимо получить сигналы мимнимум от 3-х спутников. К счастью, сегодня количество GPS-спутников достаточно велико даже для того, чтобы в любой точке земного шара определить не только двумерные, но и трехмерные координаты – широту, долготу и высоту над уровнем моря. Для этого нужно получать сигналы минимум от 4-х спутников. При этом, чем больше спутников «видит» Ваш GPS – приемник, тем точнее он может определить координаты местоположения – вплоть до максимального предела, определяемого точностью системы. Из этого, в частности, следует, что точность работы GPS-навигатора снижается, если сигналы от некоторых спутников экранируются местными предметами (рельефом местности, деревьями с плотной кроной, высокими зданиями и т.п.). Как известно, спутниковая GPS-система оплачивается и находится под контролем Департамента обороны США, который зарезервировал предельную точность исключительно для своих военных целей. Для этого передаваемый спутниками сигнал кодируется с помощью специального Р-кода, который может быть декодирован только военными GPS-приемниками. В дополнение к этому, в сигналы времени от спутниковых атомных часов добавляется случайная ошибка, которая искажает полученные значения координат. В результате точность гражданских GPS-премников ухудшается более чем в 10 раз по сравнению с военными и составляет около 50–150 м. В действительности, на практике все выглядит несколько сложнее, чем в теории. Это объясняется влиянием на GPS измерения различного рода ошибок. Можно выделить три категории ошибок :
 Ошибки системы связаны точностью атомных часов спутников и соответствием реальной траектории спутников заданной орбите. Несмотря на то, что в каждом GPS спутнике используются высокоточные атомные часы, они тоже могут содержать ошибки и отклоняться от истинного значения системного эталона времени. Отклонение в 30 нс ведет к ошибке определения расстояния в 10 метров. Поэтому, все отклонения бортовых часов отслеживаются и их значения передаются в составе навигационных сообщений и учитываются GPS приемником в вычислениях позиции. Второй тип системных ошибок связан с неточностью передаваемых эфемерид. В математической модели учитываются множество факторов, влияющих на изменение траектории орбит GPS спутников, но небольшие ошибки все равно присутствуют. Наиболее существенный вклад в навигационные измерения вносят ошибки, связанные с распространением сигнала атмосфере Земли, а именно в ионосферных и тропосферных ее слоях. Ионосфера Земли представляет собой слой заряженных частиц на высоте от 120 до 200 км. Эти частицы снижают скорость распространения сигнала, и, следовательно, увеличивают его время. Соответственно вносится ошибка в оценку расстояния от GPS приемника до спутника. Эти задержки могут быть смоделированы для разного времени суток, усреднены и внесены в измерения, но, к сожалению, эти модели не могут точно отобразить реальную ситуацию. После прохождения ионосферного слоя, навигационный сигнал попадает в тропосферный слой, в котором происходят все погодные явления и присутствуют водяные пары, также влияющее на скорость распространения сигнала. Для борьбы с ионосферными задержками используют дифференциальные метод определения позиции. Корректирующие поправки передаются с помощью геостационарных спутников WAAS/EGNOS и позволяют повысить точность позиционирования до 1 метра. Ошибки многолучевости можно одновременно отнести и к категории ошибок, связанных с распространением навигационного GPS сигнала, и к ошибкам GPS приемника. Ошибка многолучевости связана с переотражением навигационного сигнала от близкорасположенных объектов – зданий, металлических конструкций, деревьев и т.п. В результате этого эффекта время распространения отраженного сигнала превышает время «прямого» сигнала. Если уровень переотраженного сигнала выше уровня «прямого» сигнала, то происходит ошибочный «захват», и в результате, вносится ошибка в вычисления расстояния до спутника. 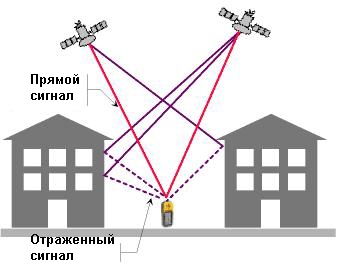 3.4 Дифференциальная GPS Для того, чтобы в ряде случаем можно было «обойти» ограничения, наложенные Департаментом обороны США, некоторые специальные службы (например, береговая охрана США) установили сеть фиксированных т.н. «дифференциальных» радио-буев. Каждый из них постоянно регистрирует сигналы GPS-спутников и сравнивает расчитанные координаты со своим известным постоянным местоположением. Вычисленная таким образом ошибка передается радио-буем на фиксированной частоте (обычно в 2-х метровом диапазоне) в виде специального сигнала. Если этот сигнал поймать с помощью дополнительного т.н. «дифференциального» приемника, подключенного к GPS-навигатору, то последний может внести соответствующую поправку и определить координаты с точностью около 1 метра. В последнее время такие службы получают все большее распространение в западных странах, однако их услуги часто бывают платными. 4. Современное состояние В настоящее время работают или готовятся к развёртыванию следующие системы спутниковой навигации:
Принадлежит министерству обороны США, что считается другими государствами её главным недостатком. Более известна под названием GPS. Единственная полностью работающая спутниковая навигационная система.
Глобальная навигационная спутниковая система (ГЛОНАСС) – советская и российская спутниковая система навигации, разработанная по заказу Министерства обороны СССР. Принадлежит министерству обороны России. Является попыткой восстановить функционировавшую с 1982 года советскую систему. Находится на этапе повторного развёртывания спутниковой группировки (оптимальное состояние орбитальной группировки спутников, запущенных в СССР, было в 1993–1995 гг.). Современная система, по заявлениям разработчиков наземного оборудования, будет обладать некоторыми техническими преимуществами по сравнению с NAVSTAR. Однако в настоящее время эти утверждения проверить невозможно ввиду недостаточности спутниковой группировки и отсутствия доступного клиентского оборудования. Основой системы должны являться 24 спутника, движущихся над поверхностью Земли в трёх орбитальных плоскостях с наклонением 64,8° и высотой 19100 км. Принцип измерения аналогичен американской системе навигации NAVSTAR.
Развёртываемая в настоящее время Китаем подсистема GNSS, предназначенная для использования только в этой стране. Особенность – небольшое количество спутников, находящихся на геостационарной орбите.
Европейская система, находящаяся на этапе создания спутниковой группировки.
Индийская навигационная спутниковая система, в состоянии разработки. Предполагается для использования только в этой стране. Запуск первого спутника ожидается в 2009 году. 4.1 Создание карт для навигационных систем Компания Navteq Corporation была образована в 1985 году и уже через девять лет начала поставлять свой софт для «заводских» навигационных систем – первым потребителем стала компания BMW. Сейчас продукцию Navteq покупают, например, для «конвейерной» установки на автомобили Chrysler и Mercedes, ею пользуются интернет-ресурсы (в частности, Google Maps), а самым известным производителем переносных PND-устройств (Personal Navigation Device) с картами Navteq является американская фирма Garmin. Сейчас карты Navteq покрывают 74 страны мира, а с февраля 2006 года в этот список входит и Россия: российское представительство компании сотрудничает с семнадцатью автопроизводителями, среди которых Peugeot, Opel и Mitsubishi, и в 2009 году к ним должен добавиться еще десяток фирм. Процесс создания электронной карты для навигационного устройства включает в себя несколько этапов. Сначала у геодезистов покупают картоснову – подробную карту местности с обозначением населенных пунктов и отображением автомобильных дорог. Затем начинается процесс ее адаптации к автомобильным нуждам: специально экипированная бригада отправляется на визуальное изучение местности. В автомобиле находятся водитель и геоаналитик с арсеналом высокоточного «оружия». Главную роль играет GPS-приемник, осуществляющий привязку к местности. С ним синхронизируется камера-регистратор, которая раз в секунду отправляет в память ноутбука привязанное к абсолютным координатам изображение. Причем для более точного описания маршрута оператор с помощью игрового джойстика «вешает» на «картинку» стандартные значки-атрибуты, обозначающие класс дороги, тип покрытия, разрешенную скорость, номера домов, пешеходные переходы и т.д. Помимо этого, оператор оставляет звуковые комментарии и делает рукописные пометки с помощью графического планшета и «карандаша». Программу для создания навигационной карты можно увидеть на рисунке ниже. За один рабочий день экипажу удается «прорисовать» от 70 до 100 км городских дорог или около 300 км пригородных трасс, причем фактический пробег получается куда большим: геоаналитику надо зафиксировать все проезжие участки, а широкие проспекты и бульвары приходится проезжать в обоих направлениях. В итоге накапливается огромный массив данных, которые потом обрабатываются в аналитическом центре. Повторное «сканирование» местности проводится по мере появления новых дорог, а старые объезжаются приблизительно раз в год, но заказчики получают обновленные версии карт ежеквартально: исправление ошибок производится главным образом по сигналам пользователей. Но до них обновленные релизы доходят как минимум через два-три месяца после анонса. Почему? Во-первых, нужно адаптировать карту под «железо» и фирменные стандарты подачи информации: цветовую схему, звуковое сопровождение и т.д. Во-вторых, между самим продуктом и его потребителем есть немало посредников, претендующих на свой кусок пирога. Иной раз диски с «фирменной» картографией для штатных навигационных систем появляются с задержкой до восьми месяцев! Неудивительно, что на фоне такой нерасторопности процветает пиратство – ворованные копии карт зачастую появляются в продаже раньше лицензионных продуктов. По состоянию на декабрь 2008 года «российские» карты Navteq покрывают дорожную сеть пятнадцати городов-миллионеров и шести областей. Всего – 281 тыс. км дорог. В начале года должна быть готова детальная карта Москвы, в которой будут прописаны не только подъездные дороги ко всем домам и корпусам, но и подробные схемы проезда «хитрых» развязок – например, повороты налево через правый «карман». Выход аналогичной карты Санкт-Петербурга планируется в первом квартале. Но в России компания Navteq сейчас в роли догоняющего – у основных конкурентов зона покрытия куда больше. Например, карты компании Навиком покрывают 412 городов с возможностью адресного поиска и 2,8 млн км дорог включая грунтовки. Аналогичные показатели у компании Навител – 231 город и 598 тыс. км, а у компании Tele Atlas – 50 городов и 875 тыс. км. Еще одна характеристика – количество объектов инфраструктуры, к которым относятся рестораны, автозаправки, гостиницы и т.д. На российской карте Navteq их отмечено 47 тысяч, в то время как карта одного Нью-Йорка содержит 60 тысяч «интересных точек». Словом, поле для деятельности – широчайшее.  5. Системы спутниковой навигации ГЛОНАСС и GPS Система Глонасс предназначена для глобальной оперативной навигации приземных подвижных объектов. СРНСС разработана по заказу Министерства Обороны. По своей структуре Глонасс так же, как и GPS, считается системой двойного действия, то есть может использоваться как в военных, так и в гражданских целях. Система в целом включает в себя три функциональные части (в профессиональной литературе эти части называются сегментами). 
Из этих трёх частей последняя, аппаратура пользователей, самая многочисленная. Система Глонасс является беззапросной, поэтому количество потребителей системы не имеет значения. Помимо основной функции – навигационных определений, – система позволяет производить высокоточную взаимную синхронизацию стандартов частоты и времени на удалённых наземных объектах и взаимную геодезическую привязку. Кроме того, с её помощью можно производить определение ориентации объекта на основе измерений, производимых от четырёх приёмников сигналов навигационных спутников. В системе Глонасс в качестве радионавигационной опорной станции используются навигационные космические аппараты (НКА), вращающиеся по круговой геостационарной орбите на высоте | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||




| Тип НКА | Масса на орбите | Мощность энергоисточников, Вт | Расчётный срок активного существования | Год запуска первого НКА |
| Блок-I | 525 | 440 | - | 1978 |
| Блок-II | 844 | 710 | 5 | 1989 |
| Блок-IIR | 1094 | 1250 | 7,5 | 1997 |
| Блок-IIF | - | - | 14–15 | 2001–2002 |
Сравнительные характеристики систем ГЛОНАСС и GPS
| Показатель | ГЛОНАСС | GPS |
| Число КА в полной орбитальной группировке | 24 | 24 |
| Число орбитальных плоскостей | 3 | 6 |
| Число КА в каждой плоскости | 8 | 4 |
| Наклонение орбиты | 64,8º | 55º |
| Высота орбиты, км | 19 130 | 20 180 |
| Период обращения спутника | 11 ч. 15 мин. 44 с | 11 ч. 58 мин. 00 с |
| Система координат | ПЗ-90 | WGS-84 |
| Масса навигационного КА, кг | 1450 | 1055 |
| Мощность солнечных батарей, Вт | 1250 | 450 |
| Срок активного существования, лет | 3 | 7,5 |
| Средства вывода КА на орбиту | «Протон-К/ДМ» | Delta 2 |
| Число КА, выводимых за один запуск | 3 | 1 |
| Космодром | Байконур (Казахстан) | Мыс Канаверел (Cape Canaveral) |
| Эталонное время | UTC (SU) | UTC (NO) |
| Метод доступа | FDMA | CDMA |
| Несущая частота: L1 L2 | 1598,0625–1604,25 7/9 L1 | 1575,42 60/77 L1 |
| Поляризация | Правосторонняя | Правосторонняя |
| Тип псевдошумовой последовательности | m-последовательность | код Голда |
| Число элементов кода: C/A P | 511 51 1000 | 1023 2,35x1014 |
| Скорость кодирования, Мбит/с: C/A P | 0,511 5,11 | 1,023 10,23 |
| Уровень внутрисистемных радиопомех, дБ | -48 | -21,6 |
| Структура навигационного сообщения | ||
| Скорость передачи, бит/с | 50 | 50 |
| Вид модуляции | BPSK (Манчестер) | BPSK NRZ |
| Длина суперкадра, мин. | 2,5 (5 кадров) | 12,5 (25 кадров) |
| Длина кадра, с | 30 (15 строк) | 30 (5 строк) |
| Длина строки, с | 2 | 6 |
При проектировании системы в целом и НКА в частности, большое внимание уделяется вопросам автономного функционирования. Так, космические аппараты первого поколения (Блок-I) обеспечивали нормальную работу системы (имеется в виду, без существенных ошибок определения координат) без вмешательства сегмента управления в течение 3–4 дней. В аппаратах Блок-II этот срок был увеличен до 14 дней. В новой модификации НКА Блок-IIR позволяет автономно работать в течение 180 дней без корректировки параметров орбиты с земли, пользуясь лишь автономным комплексом взаимной синхронизации спутников. Аппараты Блок-IIF предполагается использовать взамен отработавших Блок-IIR.
1 2