вв. лаб 1 тау. Типовые динамические звенья и исследование их характеристик в среде matlab simulink
 Скачать 0.98 Mb. Скачать 0.98 Mb.
|

|
Некоммерческое акционерное общество «Алматинский университет энергетики и связи имени Гумарбека Даукеева» Институт электроэнергетики и электротехники Кафедра «Электрических машин и электропривода» Отчет По Лабораторной работе № 1 Дисциплина: Теория автоматического управления Тема: «Типовые динамические звенья и исследование их характеристик в среде MATLAB Simulink» Специальность: Электроэнергетика Выполнила: ст. гр. ЭЭ-20-15 Камалов А. Проверила: доцент Тайгожинова. Ж. ______________«__»________2021 г. Алматы, 2021 Цель работыИспользуя методы моделирования элементов систем автоматического регулирования (САР) в среде программного обеспечения MATLAB Simulink, изучить работу типовых динамических звеньев САР. СодержаниеЦель работы……………………………………………………………2 1 Порядок выполнения работ…………………………………………4 Заключения……………………………………………………………..10 Список литературы…………………………………………………….11 1 Порядок выполнения работыЗапустить программу MATLAB и в появившемся окне нажать на панель «Simulink»(рисунок 1).  Рисунок 1 - Главное окно MATLAB Далее в открывшемся окненужный элемент и нажатием ПКМ выбираемANewBlankModel (рисунок 2).  Рисунок 2 – BlankModel Далее открывается окно где можно собрать схему в этом окне открываем вкладку библиотека (рисунок 3).  Рисунок 3 – Окно для собрания схемы После собрания всех схем нажимаем на элемент Run (рисунок 4). 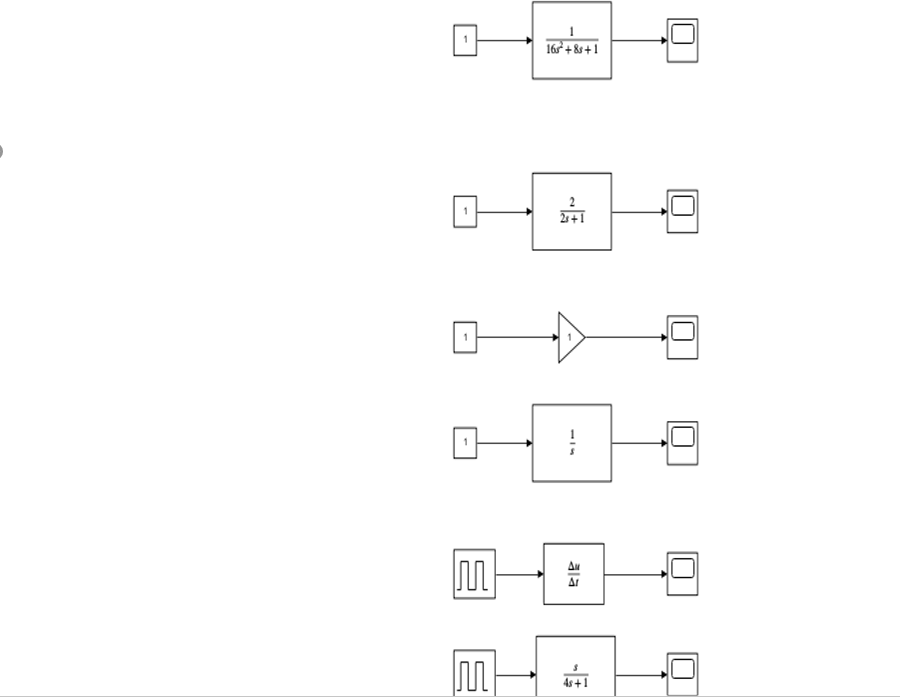 Рисунок 4 – Схемы Далее открывается переходные характеристики для звеньев (рисунки 5-10). 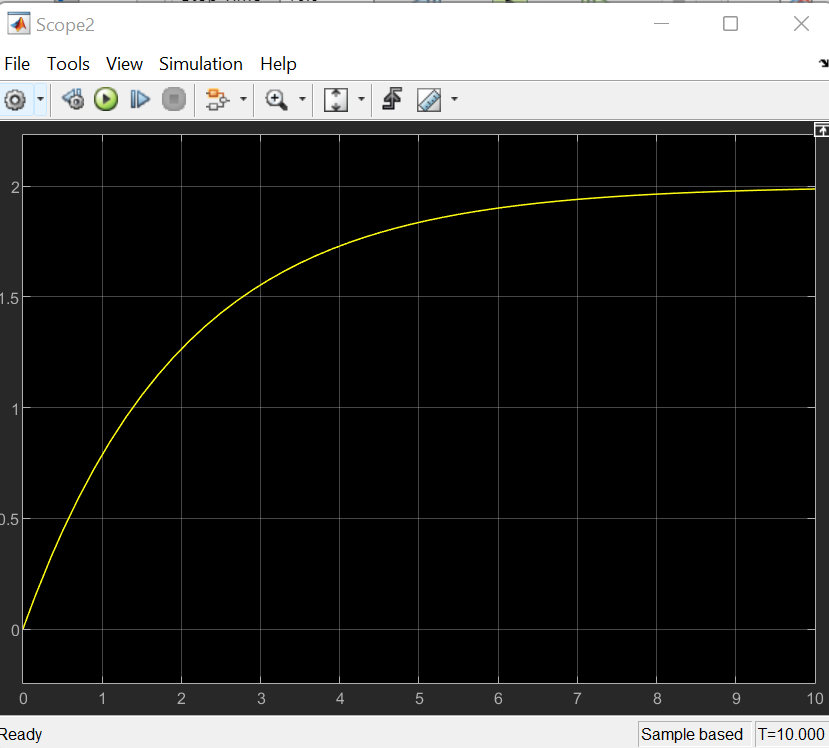 Рисунок 5 – Переходная характеристика для периодического звена 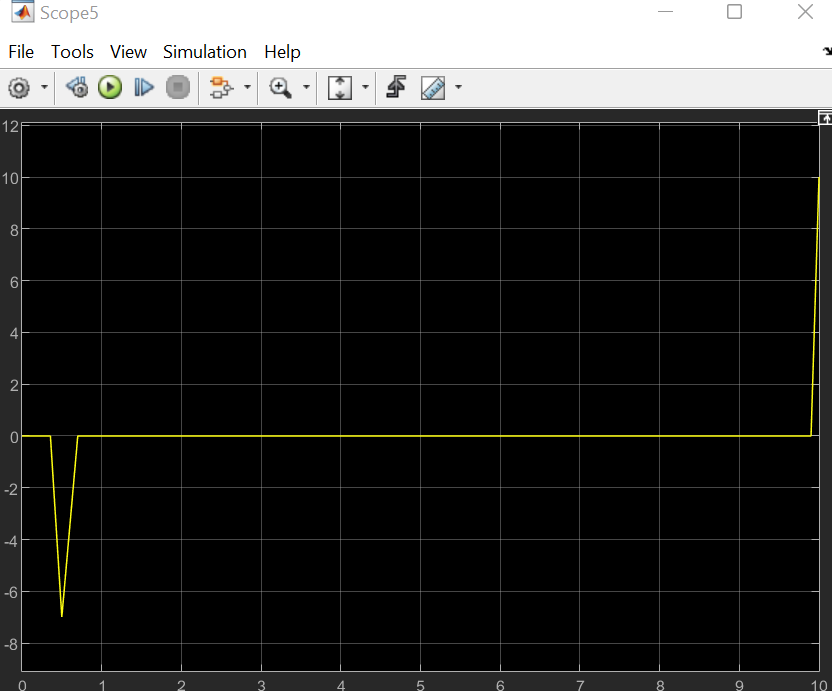 Рисунок 6 -Переходная характеристика для идеально дифференцирующего звена 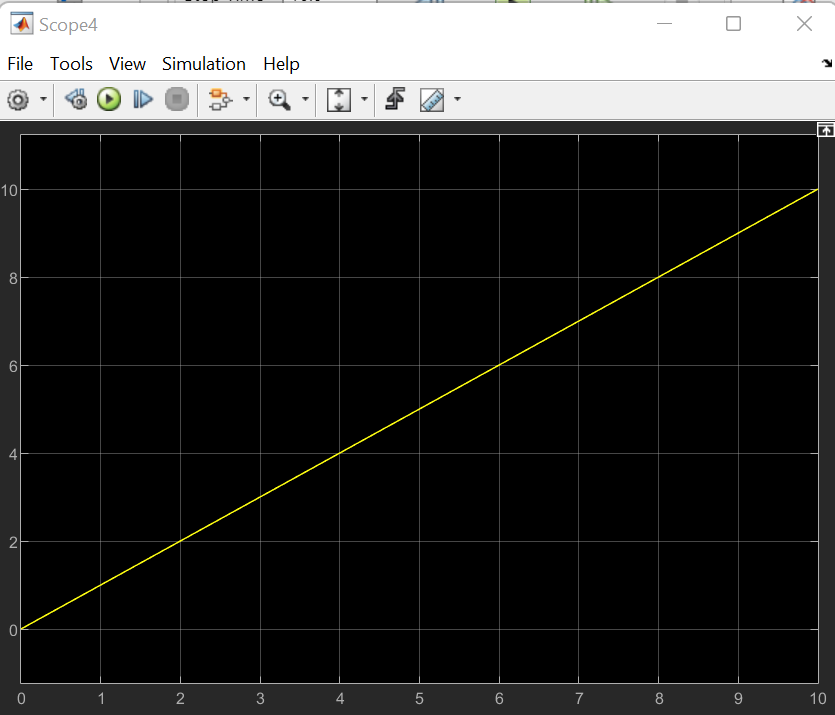 Рисунок 7 - Переходная характеристика для интегрирующего звена 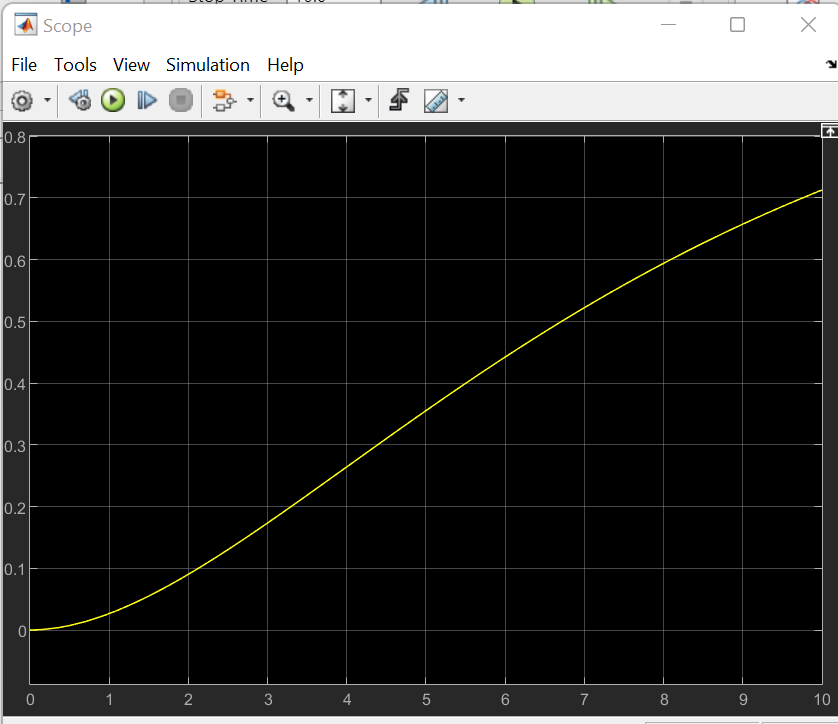 Рисунок 8 - Переходная характеристика для колебательного звена 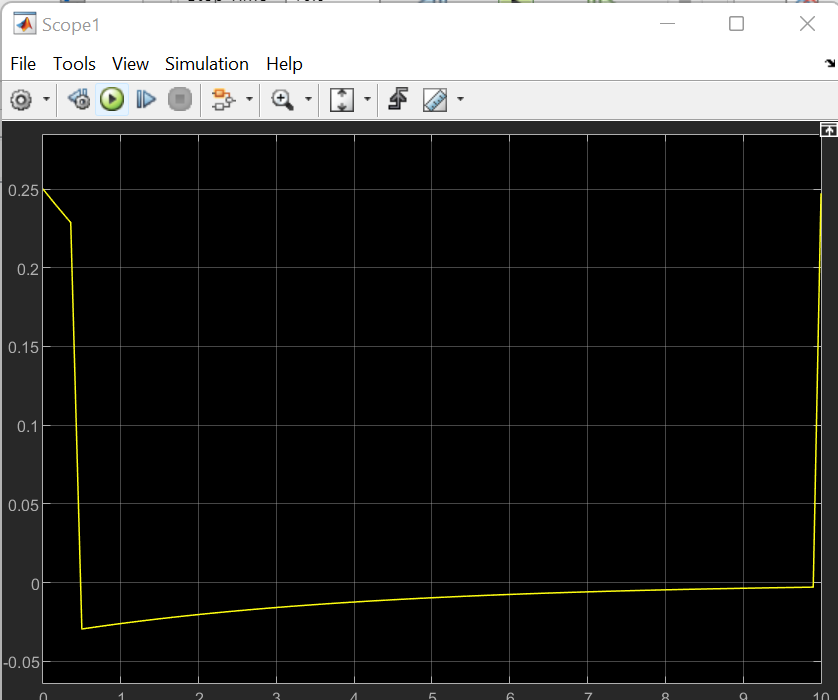 Рисунок 9 - Переходная характеристика для реально дифференцирующего звена  Рисунок 10 - Переходная характеристика для усилительного звена ЗаключенияИспользуя программу MATLAB собрал схему она состоит из входной элемент констант а на выходе получаем переходную характеристику с помощью элемента скоп (а ксилограф). Звено это математическая модель системы для каждого звена даны формулы (передаточная функция) это отношения преобразования Лапласа входного сигнала к преобразованию Лапласа выходного сигнала при нулевых начальных условиях. В формуле коэффициент К это – передаточный коэффициент, Tэто – постоянная время, а x входная величина,y выходная величина. На вход для каждого элемента мы подаем сигнал, а на выходе мы получаем переходную характеристику. Список литературы1 Власов К.П. Теория автоматического управления. Основные положения. Примеры расчета. Учебное пособие, - Харьков: Гуман. Центр, 2013. – 544 с (дата: 28.09.2021г) 2 Александровская А.Н. Автоматика. - М.: «Академия», 2011 (дата: 28.09.2021г) 3 Гайдук А.Р. Теория и методы аналитического синтеза систем автоматического управления. - М.:Физматлит, 2012. - 360 с (дата: 28.09.2021г) 4. Кудинов Ю.И. Теория автоматического управления (с использованием MATLAB - SIMULINK). Учебное пособие, - СПб.: Лань, 2016. -256 с (дата: 28.09.2021г) |