Лабораторная работа №3 (Unity Pro). Типовые схемы управления электроприводами с двигателями постоянного и переменного токов
 Скачать 30.29 Mb. Скачать 30.29 Mb.
|

|
ТИПОВЫЕ СХЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ С ДВИГАТЕЛЯМИ ПОСТОЯННОГО И ПЕРЕМЕННОГО ТОКОВ 1. Типовые схемы управления электроприводами с двигателями постоянного тока
Эта схема представлена на рис. 1.1, а. Она содержит кнопки управления SB1 (пуск) и SB2 (останов) двигателя, линейный контактор КМ1, обеспечивающий подключение двигателя к сети, и контактор ускорения КМ2 для шунтирования пускового резистора Rд. В качестве датчика времени в схеме используется электромагнитное реле времени КТ. При подключении схемы к источнику напряжения Uпроисходит возбуждение двигателя и срабатывает реле КТ, размыкая свой размыкающий контакт в цепи катушки контактора КМ2 и подготавливая двигатель к пуску.  Рис. 1.1. Схема пуска двигателя по принципу времени (а), характеристики двигателя (б) и кривые переходного процесса (в) Пуск двигателя начинается после нажатия кнопки SВ1, в результате чего получает питание контактор КМ1, который своим главным силовым контактом подключает двигатель к источнику питания. Двигатель начинает разбег с резистором Rд в цепи якоря, с помощью которого ограничивается пусковой ток двигателя. Одновременно замыкающий блок-контакт контактора КМ1шунтирует кнопку SВ1, и она может быть отпущена, а размыкающий блок-контакт КМ1разрывает цепь питания катушки реле времени КТ. Через интервал времени Δtк.тпосле прекращения питания катушки реле времени, называемый выдержкой времени, размыкающий контакт КТ замкнется в цепи катушки контактора КМ2, последний включится и главным контактом закоротит пусковой резистор Rд в цепи якоря. Таким образом, при пуске двигатель в течение времени Δtк.т разгоняется по искусственной характеристике 1 (рис. 1.1, б), апосле шунтирования резистора Rд–по естественной 2. Значение сопротивления резистора Rдвыбирается таким образом, чтобы в момент включения двигателя ток I1 в цепи и соответственно момент М1, не превосходили бы допустимого уровня. За время Δtк.т после начала пуска частота вращения двигателя достигает значения ω1, а ток в цепи якоря снижается до уровня I2(рис. 1, в). После шунтирования Rд, происходит бросок тока в цепи якоря от I2 до I1 который не превышает допустимого уровня. Изменение частоты вращения, тока и момента во времени происходит по экспоненте. Останов двигателя осуществляется нажатием кнопки SВ2, что приведет к отключению якоря двигателя от источника питания и его торможению под действием момента сопротивления на валу. Такой способ останова двигателя получил название «торможение выбегом».
В этой схеме (рис. 1.2, а) в качестве датчика ЭДС использован якорь двигателя, к которому подключены катушки контакторов ускорения КМ1и КМ2, обеспечивающих шунтирование пусковых резисторов Rд1 и Rд2. С помощью регулировочных резисторов Rу1, и Rу2 , которые могут быть на строены на срабатывание при определенных частотах вращения двигателя. 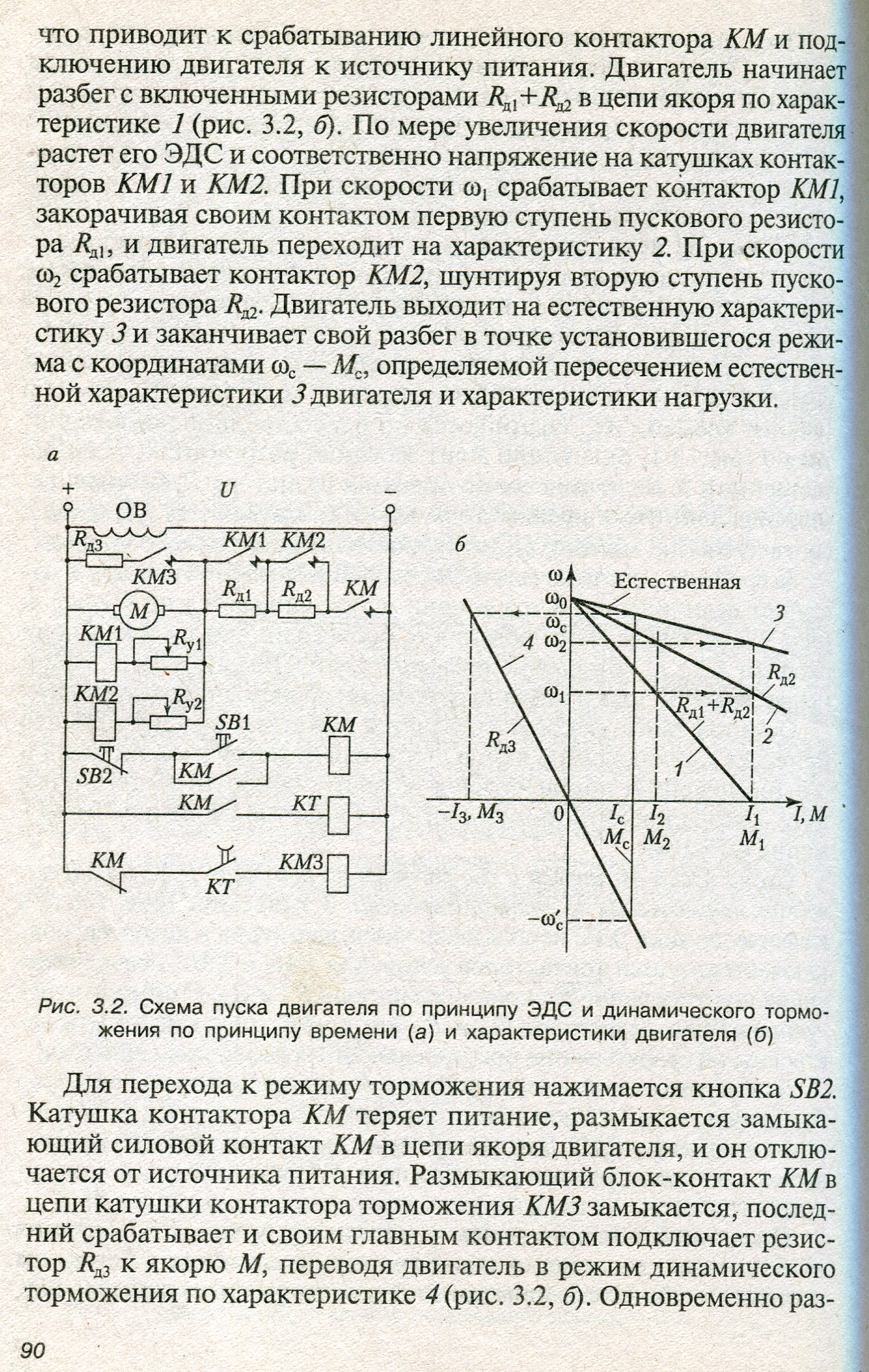 Рис. 1.2. Схема пуска двигателя по принципу ЭДС и динамического торможения по принципу времени (а) и характеристики двигателя (б) Для осуществления торможения в схеме предусмотрен резистор R3, подключение и отключение которого осуществляется контактором торможения КМЗ. Для обеспечения выдержки времени используется электромагнитное реле времени КТ, размыкающий контакт которого включен в цепь катушки контактора торможения КМ2. После подключения схемы к источнику питания происходит возбуждение двигателя, а аппараты схемы остаются в исходном положении. Пуск двигателя осуществляется нажатием кнопки SВ1, что приводит к срабатыванию линейного контактора КМ и подключению двигателя к источнику питания. Двигатель начинает разбег с включенными резисторами Rд1 + Rд2 в цепи якоря по характеристике 1 (рис. 1.2, б). По мере увеличения частоты вращения двигателя растет его ЭДС и соответственно напряжение на катушках контакторов КМ1 и КМ2. При частоте вращения ω1 срабатывает контактор КМ1, закорачивая своим контактом первую ступень пускового резистора Rд1, и двигатель переходит на характеристику 2. При частоте вращения ω2 срабатывает контактор КМ2,шунтируя своим контактом вторую ступень пускового резистора Rд2. Двигатель переходит на естественную характеристику 3 и заканчивает свой разбег в точке установившегося режима с координатами ωс – Мс, определяемой пересечением естественной характеристики 3 двигателя и характеристики нагрузки. Для перехода к режиму торможения нажимается кнопка SB2. Катушка контактора КМ теряет питание, размыкается замыкающий силовой контакт КМ в цепи якоря двигателя, и он отключается от источника питания. Размыкающий блок-контакт КМ3 замыкается, последний срабатывает и своим главным контактом подключает резистор Rд3 к якорю М, переводя двигатель в режим динамического торможения по характеристике 4 (рис. 1.2, б). Одновременно размыкается замыкающий контакт контактора КМ вцепи реле времени КТ, оно теряет питание и начинает отсчет времени. Через интервал времени, который соответствует снижению частоты вращения двигателя до нуля, реле времени отключается и своим контактом разрывает цепь питания контактора КМЗ. Резистор Rд3 отключается от якоря М двигателя, торможение заканчивается, и схема возвращается в свое исходное положение. Применение динамического торможения обеспечивает более быстрый останов двигателя и тем самым быстрое прекращение движения исполнительного органа рабочей машины.
Управление двигателем при пуске происходит по аналогии со схемой рис. 1.1. При включении двигателя в этой схеме (рис. 1.3) и работе от источника питания размыкающий контакт линейного контактора КМ в цепи контактора торможения КМ2разомкнут, что предотвращает перевод двигателя в режим торможения. 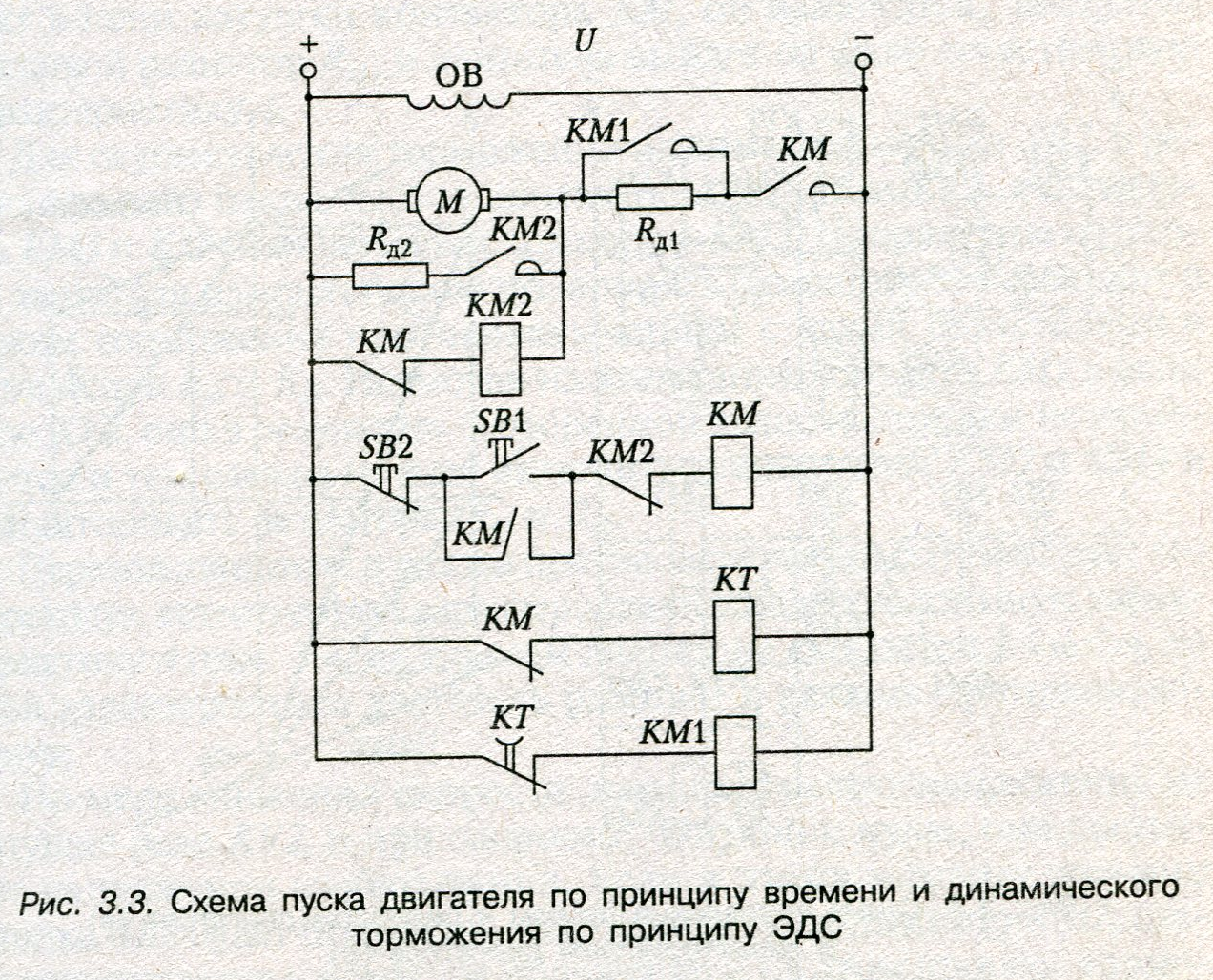 Рис. 1.3.Схема пуска двигателя по принципу времени и динамического торможения по принципу ЭДС Торможение осуществляется нажатием кнопки SВ2. Контактор КМ, потеряв питание, отключает якорь двигателя от источника питания и замыкает своим контактом цепь питания катушки контактора КМ2. Последний от действия наведенной в якоре ЭДС срабатывает и замыкает якорь М на резистор торможения Rд1. Процесс динамического торможения происходит до тех пор, пока при небольшой частоте вращения двигателя его ЭДС не станет меньше напряжения отпускания контактора КМ2, которыйотключится, и схема вернется в исходное положение.
В этой схеме (рис. 1.4, а) предусмотрено два линейных контактора КМ1 и КМ2, обеспечивающих его вращение соответственно в условных направлениях «Вперед» и «Назад». Главные контакты этих аппаратов образуют реверсивный контактный мостик, с помощью которого можно изменить полярность напряжения на якоре М и тем самым осуществлять торможение противовключением и реверс (изменение направления вращения) двигателя. В якорной цепи помимо пускового резистора Rд1 включен резистор противовключения Rд2, который управляется контактором противовключения КМЗ. 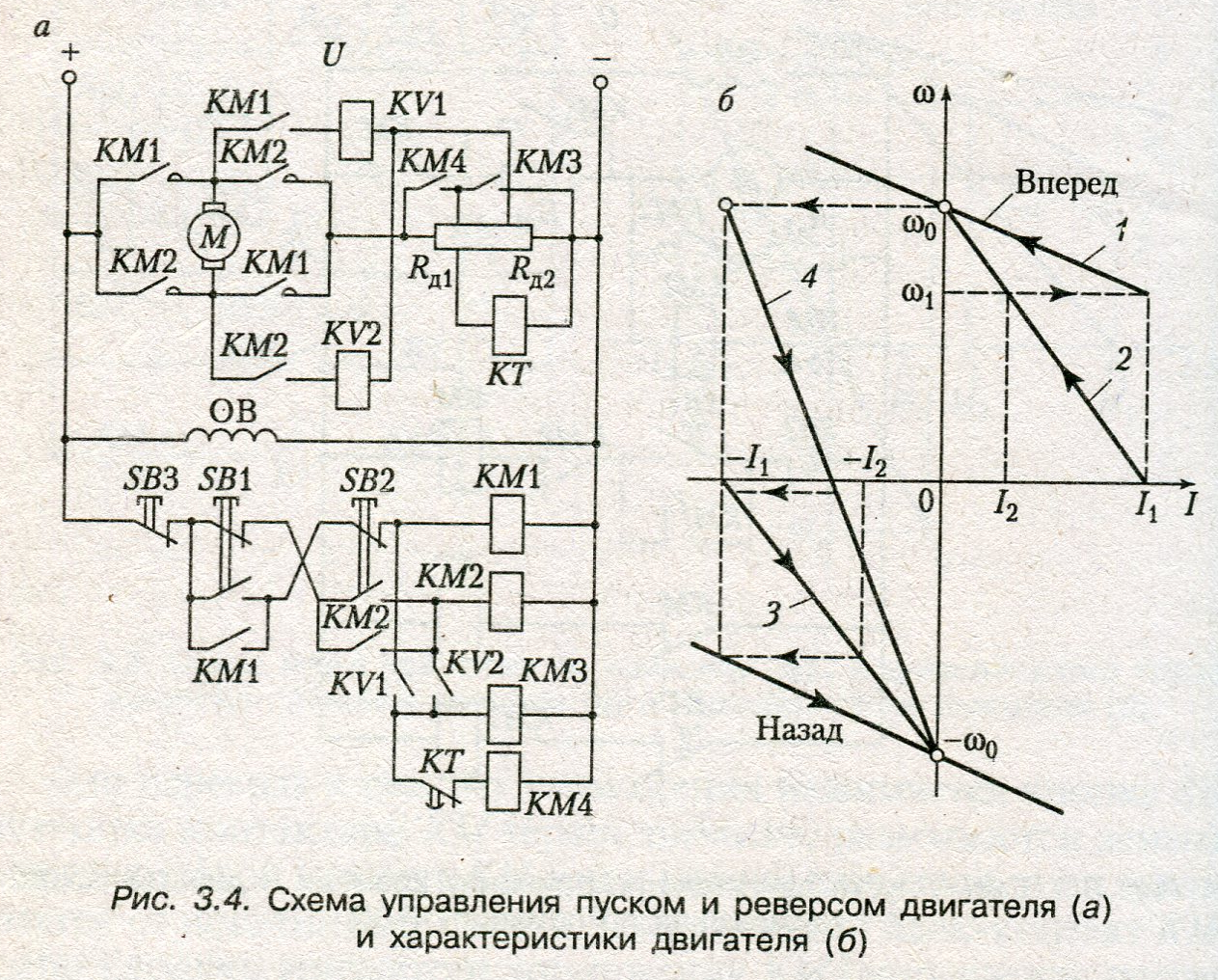 Рис. 1.4.Схема управления пуском и реверсом двигателя (а) и характеристики двигателя (б) Управление двигателем при торможении противовключением и реверсе осуществляется с помощью двух реле противовключения КV1и КV2. Их назначение в том, чтобы в режиме противовключения для ограничения тока в якоре до допустимого уровня обеспечить ввод в цепь якоря в дополнение к пусковому резистору Rд1, резистор противовключения Rд2, что достигается выбором точки присоединения катушек реле КV1и КV2к резистору (Rд1 + Rд2). Пуск двигателя в любом направлении осуществляется в одну ступень в функции времени. При нажатии, например, кнопки SВ1срабатывает контактор КМ1и подключает якорь М кисточнику питания. За счет падения напряжения на резисторе Rд1, от пускового тока срабатывает реле времени КТ, размыкающее свой контакт в цепи контактора КМ. Включение КМ1приведет также к срабатыванию реле КV1, которое замкнет свой замыкающий контакт в цепи контактора противовключения КМЗ. Это вызовет включение КМЗ, что приведет к закорачиванию ненужного при пуске резистора противовключения Rд2 и одновременно катушки реле времени КТ. Двигатель начнет разбег по характеристике 2 (рис. 1.4, б), а реле времени КТ –отсчет выдержки времени. По истечении выдержки времени реле КТ замкнет свой контакт в цепи катушки контактора КМ, он включится, закоротит пусковой резистор Rд1 и двигатель выйдет на свою естественную характеристику 1. Для осуществления торможения нажимается кнопка SВ2, в результате чего отключаются контактор КМ1, реле КV1, контакторы КМЗи КМ4и включается контактор КМ2. Напряжение на якоре двигателя изменяет свою полярность, и двигатель переходит в режим торможения противовключением с двумя резисторами в цепи якоря Rд1 и Rд2. Несмотря на замыкание контакта КМ2вцепи реле КV2, оно в результате оговоренной выше настройки не включается и тем самым не дает включиться аппаратам КМЗи КМ4и зашунтировать резисторы Rд1 и Rд2. Перевод двигателя в режим противовключения соответствует его переходу с естественной характеристики 1 на искусственную характеристику 4 (рис. 1.4, б). Во всем диапазоне частот вращения 0 < ω < ω0 на этой характеристике двигатель работает в режиме противовключения. По мере снижения частоты вращения двигателя растет напряжение на катушке реле КV2, и при частоте вращения, близкой к нулю, оно достигнет напряжения срабатывания. Если к этому моменту времени кнопка SВ2будет отпущена, то отключается контактор КМ2, схема возвращается в исходное положение и на этом процесс торможения заканчивается. Если же при достижении малой частоты вращения кнопка SВ2остается нажатой, то включается реле КV2и процесс пуска двигателя повторяется, но уже в противоположную сторону. Таким образом, реверсирование двигателя включает в себя два этапа: торможение противовключением и пуск в противоположном направлении. Второй этап реверса изображен на рис. 1.4, б переходом двигателя с характеристики 4 на характеристику 3, соответствующую обратной полярности напряжения на якоре двигателя и наличию в якоре добавочного резистора Rд1.
В этой схеме (рис. 1.5) используется реле тока КА, катушка которого включена в цепь якоря М, а размыкающий контакт – в цепь питания контактора ускорения КМ2. Реле тока настраивается таким образом, чтобы его ток отпускания соответствовал току I2 (см. рис. 1.1, б). В схеме исполь зуется также дополнительное блокировочное реле КVс временем срабатывания большим, чем у реле КА. 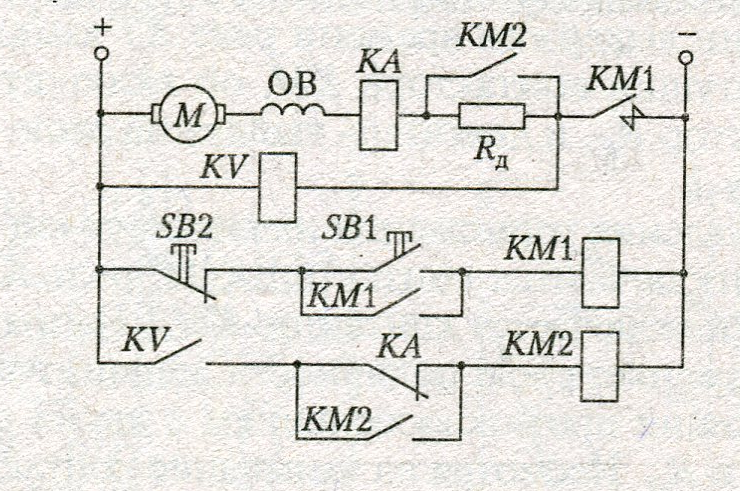 Рис. 1.5. Схема пуска двигателя по принципу тока Работа схемы при пуске происходит следующим образом. После нажатия на кнопку SВ1срабатывает контактор КМ1, двигатель подключается к источнику питания и начинает свой разбег. Бросок тока в якорной цепи после замыкания главного контакта контактора КМ1вызовет срабатывание реле тока КА, которое разомкнет свой размыкающий контакт в цепи контактора КМ2. Через некоторое время после этого срабатывает КV изамыкает свой замыкающий контакт в цепи контактора КМ2, подготавливая его к включению. По мере разбега двигателя ток якоря снижается до значения тока переключения I2. При этом токе отключается реле тока и замыкает свой размыкающий контакт в цепи катушки контактора КМ2. Последний срабатывает, его главный контакт закорачивает пусковой резистор Rд, в цепи якоря, а вспомогательный контакт шунтирует контакт реле тока КА. Поэтому вторичное включение реле тока КА после закорачивания Rд и броска тока не вызовет отключения контактора КМ2и двигатель продолжит разбег по своей естественной характеристике.
Типовые релейно-контакторные схемы управления ЭП содержат элементы блокировок, защит, сигнализации, а также связи с технологическим оборудованием. Для унификации схемных решений электротехническая промышленность выпускает стандартные станции, блоки и панели управления, специализированные по видам ЭП рабочих механизмов, функциональным возможностям, условиям эксплуатации, роду тока и т.д. Ниже в качестве примера рассмотрена схема одного из таких типовых устройств (рис. 1.6). 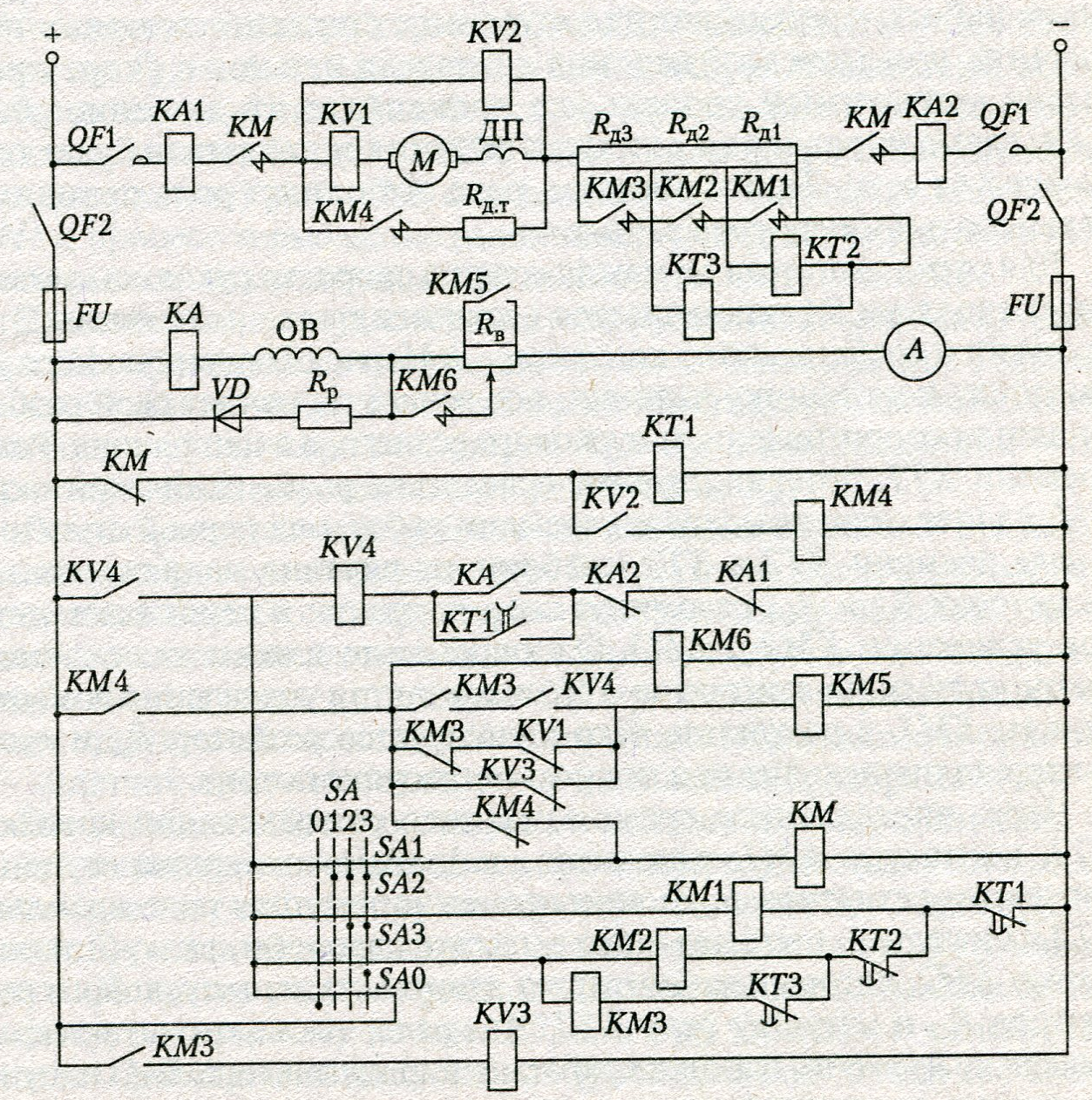 Рис. 1.6. Схема типовой панели управления двигателем Органом управления в этой схеме является командоконтроллер SА, имеющий четыре положения рукоятки: одно нулевое (начальное) и три рабочих (см. рис. 1.6). Пуск двигателя осуществляется в три ступени по принципу времени, торможение – динамическое по принципу ЭДС. Перед пуском командоконтроллер устанавливается в нулевое положение, затем включаются автоматические выключатели QF1и QF2и ЭП подключается к источнику питания. По обмотке ОВвозбуждения начинает протекать ток возбуждения, и, кроме того, срабатывает реле времени КТ1, шунтируя в цепи реле контроля напряжения своим контактом контакт реле КА обрыва цепи обмотки возбуждения. Если при этом реле максимального тока КА1и КА2находятся в нормальном (отключенном) положении, то срабатывает реле КV4, подготавливая питание схемы управления через свой замыкающий контакт. Если в процессе работы произойдет недопустимое снижение напряжения питания или тока возбуждения двигателя или ток в якоре превысит допустимый уровень, то произойдет отключение реле КV4, схема управления лишится питания и двигатель будет отключен от сети. Таким образом, реле выполняет роль исполнительного элемента трех защит. Для пуска двигателя до максимальной частоты вращения рукоятка командоконтроллера SА перемещается в крайнее третье положение. Это приведет к срабатыванию контактора КМ и подключению якоря М двигателя к источнику питания, после чего он начнет свой разбег с полным сопротивлением пускового резистора в цепи якоря. Реле времени КТ1, потеряв питание вследствие размыкания контакта КМ, начнет отсчет выдержки времени работы на первой ступени, а реле времени КТ2 и КТЗ, сработав от падения напряжения на резисторах Rд1 и Rд2, разомкнут свои контакты в цепях контакторов ускорения КМ2и КМ3. Одновременно с этим включаются «экономический» контактор КМ6и контактор управления возбуждением КМЗ, в результате чего шунтируется резистор Rв и пуск двигателя происходит при полном магнитном потоке. Через определенное время замкнется размыкающий контакт КТ1, контактор КМ1включится, зашунтирует первую ступень пускового резистора Rд1и одновременно катушку реле времени КТ2. Последнее, отсчитав свою выдержку времени, включит контактор КМ2, который зашунтирует вторую ступень пускового резистора Rд2 и катушку реле КТЗ. Это реле, также отсчитав свою выдержку времени, вызовет срабатывание контактора КМЗ и шунтирование последней ступени пускового резистора, после чего двигатель выходит на свою естественную характеристику. После шунтирования третьей ступени пускового резистора начинается ослабление магнитного потока, которое подготавливается включением реле КVЗсрабатывания КМЗ. В процессе ослабления тока возбуждения с помощью реле управления КV1обеспечивается контроль за током якоря. При бросках тока реле КV1обеспечивает включение или отключение контактора КМЗ, усиливая или ослабляя ток возбуждения, в результате чего ток в якор ной цепи не выходит за допустимые пределы. При размыкании контакта КМ5 часть тока возбуждения замыкается через диод VDи разрядный резистор Rр. Торможение двигателя осуществляется перестановкой рукоятки командоконтроллера SА в нулевое положение. Это приводит к выключению контактора КМ иотключению якоря М отисточника питания. Поскольку в процессе пуска двигателя реле динамического торможения КV2включилось, замыкание размыкающего контакта КМ в цепи контактора торможения КМ4вызовет его включение. Резистор Rдт окажется подключенным к якорю М двигателя, который перейдет в режим динамического торможения. При малых частотах вращения двигателя, когда его ЭДС станет ниже напряжения отпускания (удержания) реле КV2, оно отключится, выключит контактор КМ4и процесс торможения закончится. Отметим, что динамическое торможение происходит при полном магнитном потоке. Для снижения частоты вращения двигателя рукоятка командоконтрол лера SА переводится в положения 1 или 2. В положении 1 двигатель работает на искусственной характеристике, соответствующей наличию в цепи якоря резисторовRд2 + Rд3, а в положении 2 —на характеристике, обусловленной резистором Rд3.
Типовые схемы релейно-контакторного управления асинхронными двигателями (АД) строятся по тем же принципам, что и схемы управления двигателями постоянного тока.
с короткозамкнутым ротором Двигатели этого типа малой и средней мощности обычно пускаются прямым подключением к сети без ограничения пусковых токов. В этих случаях они управляются с помощью магнитных пускателей, которые одновременно обеспечивают и некоторые виды их защиты. Схема управления асинхронным двигателем с использованием магнитного пускателя (рис. 2.1) включает в себя магнитный пускатель, состоящий из контактора КМ и трех встроенных в него тепловых реле защиты КК. Схема обеспечивает прямой (без ограничения тока и момента) пуск двигателя, отключение его от сети, а также защиту от коротких замыканий (предохранители FА) и перегрузки (тепловые реле КК). 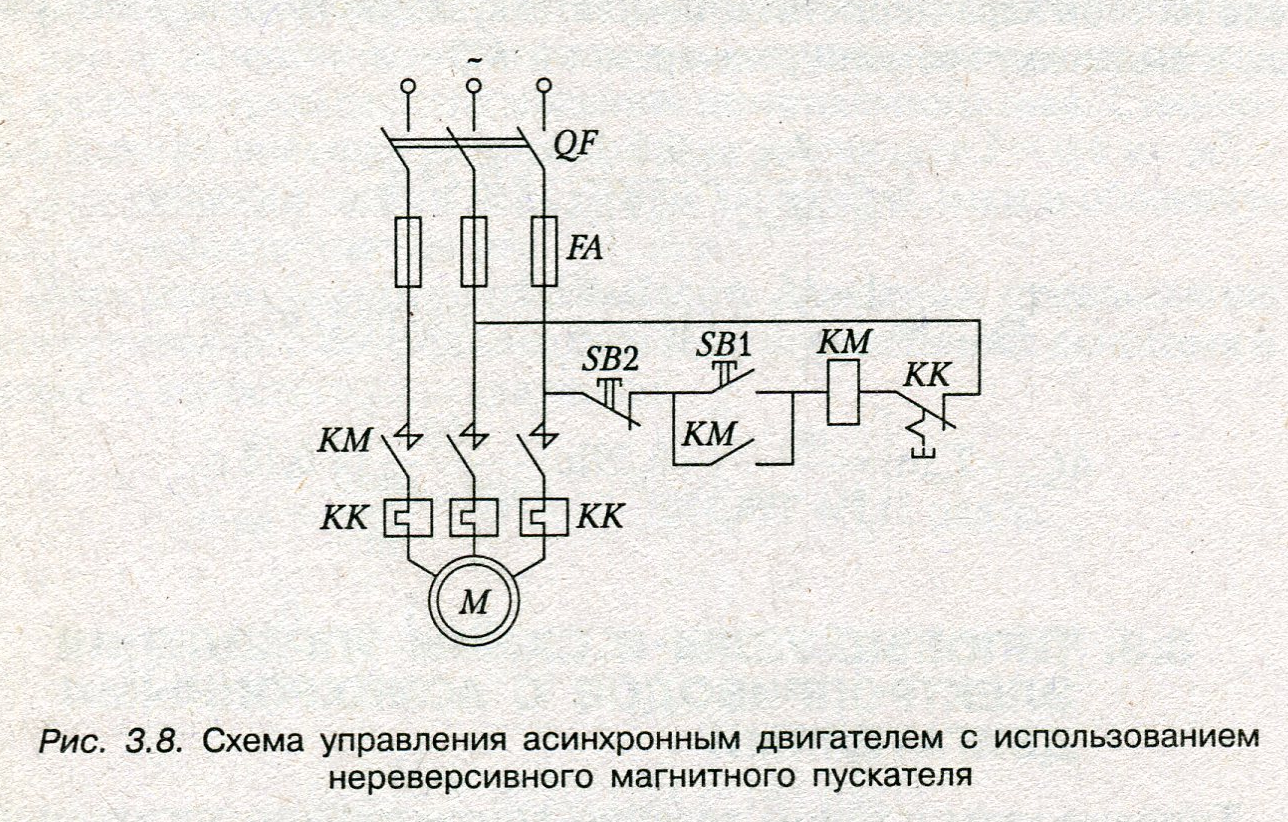 Рис. 2.1.Схема управления АД с использованием нереверсивного магнитного пускателя Для пуска двигателя замыкают выключатель QFи нажимают кнопку пуска SВ1. Получает питание катушка контактора КМ, который, включившись, своими главными силовыми контактами в цепи статора двигателя подключает его к источнику питания, а вспомогательным контактом шунтирует кнопку SВ1. Происходит разбег двигателя по его естественной характеристике. Для отключения двигателя нажимается кнопка остановки SВ2, контактор КМ теряет питание и отключает двигатель от сети. Начинается процесс торможения двигателя выбегом под действием момента нагрузки на его валу.
Основным элементом этой схемы является реверсивный магнитный пускатель, который включает в себя два линейных контактора КМ1и КМ2и два тепловых реле защиты КК (рис. 2.2). Схема обеспечивает прямой пуск и реверс двигателя, а также торможение противовключением при ручном (неавтоматическом) управлении. 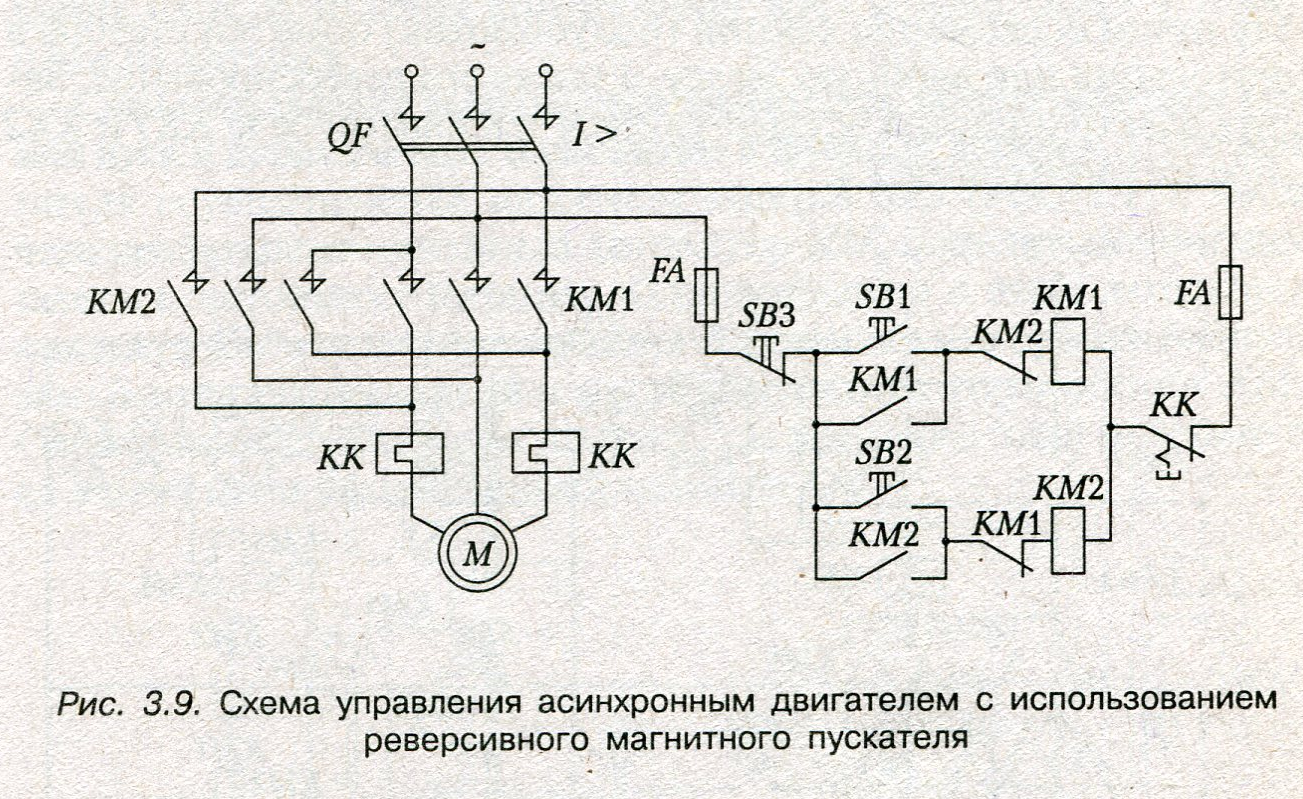 Рис. 2.2. Схема управления АД с использованием реверсивного магнитного пускателя В схеме предусмотрена защита от перегрузок двигателя (реле КК) и коротких замыканий в цепи статора (автоматический выключатель QF) и управления (предохранители FА). Кроме того, схема управления обеспечивает и нулевую защиту от исчезновения (снижения) напряжения сети (контакторы КМ1и КМ2). Пуск двигателя при включенном QF в условных направлениях «Вперед» или «Назад» осуществляется нажатием соответственно кнопок SВ1 или SВ2. Это приводит к срабатыванию контактора КМ1или КМ2, подключению двигателя к сети и его разбегу. Для реверса или торможения двигателя вначале нажимается кнопка SВЗ, что приводит к отключению включенного до сих пор контактора (например, КМ1), после чего нажимается кнопка SВ2. Это приводит к включению контактора КМ2 и подаче на АД напряжения источника питания с другим порядком чередования фаз. Магнитное поле двигателя изменяет свое направление вращения на противоположное, что приводит к началу процесса реверса. Этот процесс состоит из двух этапов: торможения противовключением и разбега в противоположную сторону. В случае необходимости только торможения двигателя при достижении им нулевой частоты вращения должна быть вновь нажата кнопка SВЗ, что приведет к отключению двигателя от сети и возвращению схемы в исходное положение. Если кнопка SВЗнажата не будет, то это приведет к разбегу двигателя в другую сторону, т.е. к его реверсу. Во избежание короткого замыкания в цепи статора, которое может возникнуть в результате одновременного ошибочного нажатия кнопок SВ1и SВ2, в реверсивных магнитных пускателях иногда предусматривается специальная механическая блокировка. Она представляет собой рычажную систему, которая предотвращает втягивание одного контактора, если включен другой. В дополнение к механической блокировке в схеме используется типовая электрическая блокировка, применяемая в реверсивных схемах управления. Она предусматривает перекрестное включение размыкающих контактов аппарата КМ1в цепь катушки аппарата КМ2 и, наоборот. Следует отметить, что повышению надежности и удобства в эксплуатации способствует использование в схеме воздушного автоматического выключателяQF. Его наличие исключает возможность работы привода при обрыве одной фазы, при однофазном коротком замыкании.
Эта схема (рис. 2.3) обеспечивает получение двух скоростей двигателя путем соединения секций (полуобмоток) обмотки статора в треугольник или двойную звезду, а также его реверсирование. Защита электропривода осуществляется тепловыми реле КК1и КК2и предохранителями FА. 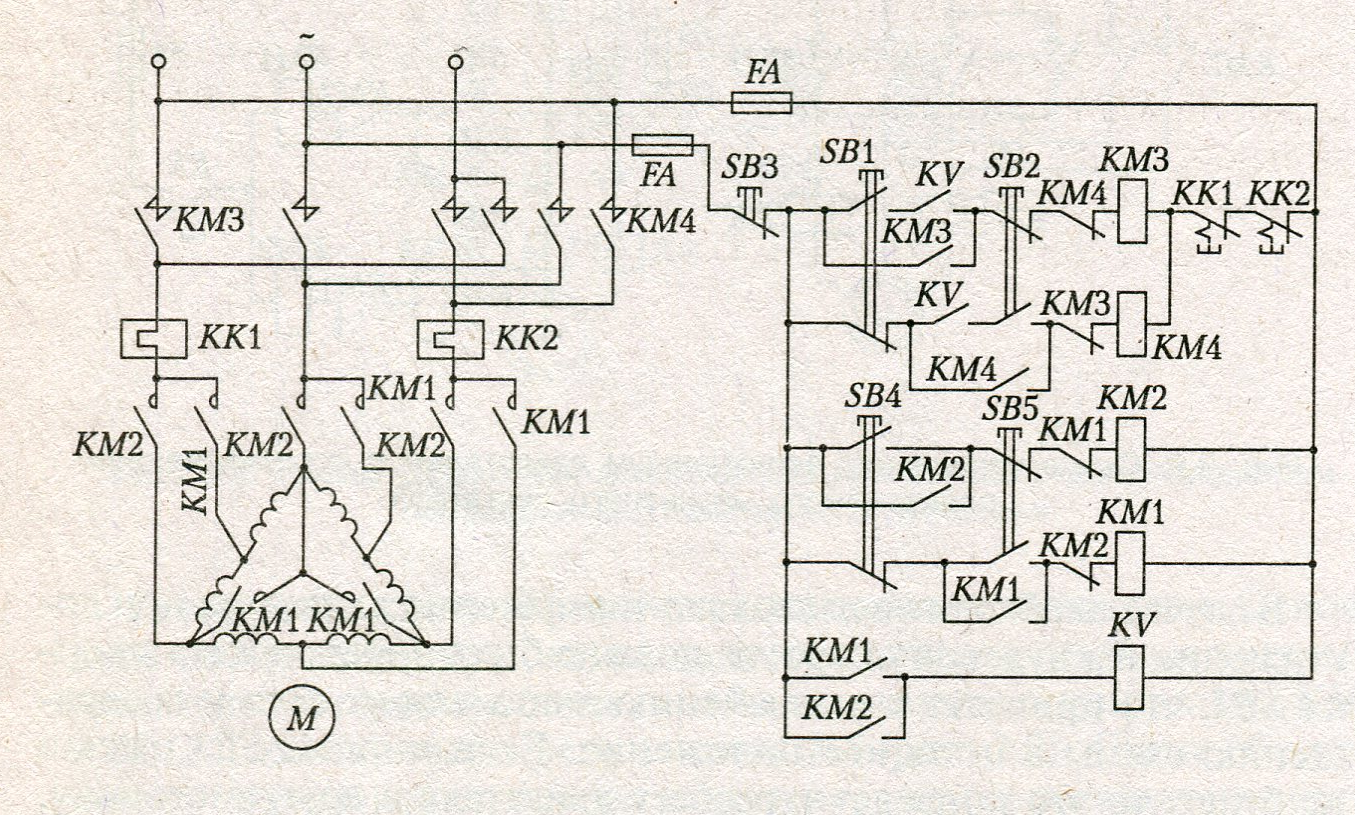 Рис. 2.3. Схема управления двухскоростным АД Для пуска двигателя на низкую частоту вращения нажимается кнопка SВ4, после чего срабатывает контактор КМ2 иблокировочное реле КV. Статор двигателя оказывается включенным по схеме треугольника, а реле КV, замкнув свои контакты в цепях катушек аппаратов КМЗи КМ4, подготавливает подключение двигателя к источнику питания. Далее нажатие кнопки SВ1или SВ2 приводит к включению соответственно в направлении «Вперед» или «Назад». После разбега двигателя до низкой частоты вращения может быть осуществлен его разгон до высокой частоты вращения. Для этого нажимается кнопка SВ5, что приведет к отключению контактора КМ2ивключению контактора КМ1, обеспечивающему переключение секций обмоток статора с треугольника на двойную звезду. Остановка двигателя производится нажатием кнопки SВ3, что вызовет отключение всех контакторов от сети и торможение двигателя выбегом. Применение в схеме двухцепных кнопок управления не допускает одновременного включения контакторов КМ1 и КМ2, КМ3и КМ4. Этой же цели служит перекрестное включение размыкающих блок-контактов контакторов КМ1 и КМ2, КМ3и КМ4 в цепи их катушек.
Пуск двигателя осуществляется нажатием кнопки SВ1(рис. 2.4), после чего срабатывает линейный контактор КМ,подключающий двигатель к источнику питания. Одновременно с этим замыкание контакта КМ вцепи реле времени КТ вызовет его срабатывание и замыкание его контакта в цепи контактора торможения КМ1. Однако последний не срабатывает, так как перед этим разомкнулся в этой цепи размыкающий контакт КМ. 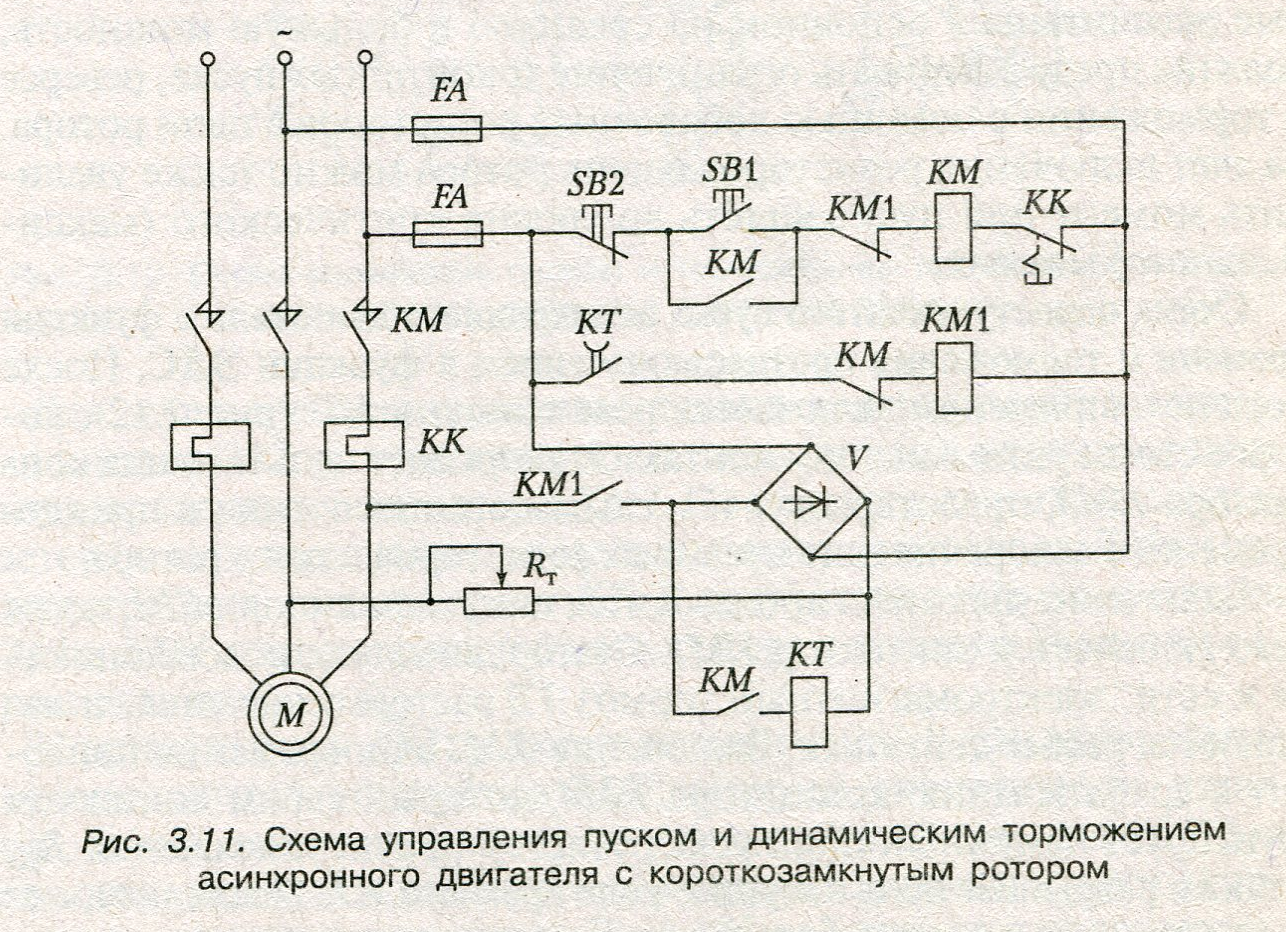 Рис. 2.4.Схема управления пуском и динамическим торможением АД с короткозамкнутым ротором Для остановки двигателя нажимается кнопка SВ2,Контактор КМ отключается, размыкая свои контакты в цепи статора двигателя и отключая тем самым его от сети переменного тока. Одновременно с этим замыкается контакт КМ вцепи аппарата КМ1и размыкается контакт КМ в цепи реле КТ. Это приводит к включению контактора торможения КМ1, подаче в обмотки статора постоянного тока от выпрямителя Vчерез резистор Rт и переводу двигателя в режим динамического торможения. Реле времени КТ, потеряв питание, начинает отсчет выдержки времени. Через интервал времени, соответствующий времени останова двигателя, реле КТ размыкает свой контакт в цепи контактора КМ1, тот отключается, прекращая подачу постоянного тока в цепь статора. Схема возвращается в исходное положение. Интенсивность динамического торможения регулируется резистором Rт,с помощью которого устанавливается необходимый постоянный ток в статоре двигателя. Для исключения возможности одновременного подключения статора к источникам переменного и постоянного тока в схеме использована типовая блокировка с помощью размыкающих контактов КМ и КМ1, включенных перекрестно в цепи катушек этих аппаратов. Типовые схемы управления АДс фазным ротором. Схемы управления двигателя с фазным ротором, которые рассчитаны в основном на среднюю и большую мощность, должны предусматривать ограничение токов при их пуске, реверсе и торможении с помощью добавочных резисторов в цепи ротора. За счет включения резисторов в цепь ротора можно также увеличить момент при пуске вплоть до уровня критического (максимального) момента.
После подачи напряжения включается реле времени КТ (рис. 2.5), ко торое своим размыкающим контактом разрывает цепь питания контактора КМ3, предотвращая тем самым его включение и преждевременное закорачивание пусковых резисторов в цепи ротора.  Рис.2.5. Схема управления пуском и торможением противовключением АД с фазным ротором Включение двигателя производится нажатием кнопки SВ1, после чего включается контактор КМ1. Статор двигателя подсоединяется к сети, электромагнитный тормоз YВ растормаживается, и начинается разбег двигателя. Включение КМ1одновременно приводит к срабатыванию контактора КМ4, который своим контактом шунтирует ненужный при пуске резистор противовключения Rд2, а также разрывает цепь катушки реле времени КТ. Последнее, потеряв питание, начинает отсчет выдержки времени, после чего замыкает свой контакт в цепи катушки контактора КМ3, который срабатывает и шунтирует пусковой резистор Rд1, в цепи ротора, и двигатель выходит на свою естественную характеристику. Управление торможением обеспечивает реле торможения KV, контролирующее уровень ЭДС (частоты вращения) ротора. С помощью резистора Rp, оно отрегулировано таким образом, что при пуске, когда скольжение двигателя 0 < s < 1, наводимая в роторе ЭДС будет недостаточна для включения, а в режиме противовключения, когда 1 < s < 2, уровень ЭДС достаточен для его включения. Для осуществления торможения двигателя нажимается сдвоенная кнопка SВ2, размыкающий контакт которой разрывает цепь питания катушки контактора КМ1. После этого двигатель отключается от сети и разрывается цепь питания контактора КМ4и замыкается цепь питания реле КТ. В результате этого контакторы КМ3и КМ4отключаются и в цепь ротора двигателя вводится сопротивление Rд1 + Rд2. Нажатие кнопки SВ2приводит одновременно к замыканию цепи питания катушки контактора КМ2, который, включившись, вновь подключает двигатель к сети, но уже с другим чередованием фаз сетевого напряжения на статоре. Двигатель переходит в режим торможения противовключением. Реле КVсрабатывает и после отпускания, кнопки SВ2будет обеспечивать питание контактора КМ2через свой контакт и замыкающий контакт этого аппарата. В конце торможения, когда частота вращения будет близка к нулю и ЭДС ротора уменьшится, реле КVотключится и своим размыкающим контактом разомкнет цепь катушки контактора КМ2. Последний, потеряв питание, отключит двигатель от сети, и схема придет в исходное состояние. После отключения КМ2 тормоз YВ, потеряв питание, обеспечит фиксацию (торможение) вала двигателя.
Схема (рис. 2.6) включает в себя контакторы КМ1, КМ2 и КМ3;реле тока КА;реле контроля частоты вращения SR, промежуточное реле KV; понижающий трансформатор для динамического торможения Т;выпрямитель VD. Максимальная токовая защита осуществляется предохранителями FA1и FA2, защита от перегрузки двигателя – тепловыми реле КК1 и КК2. 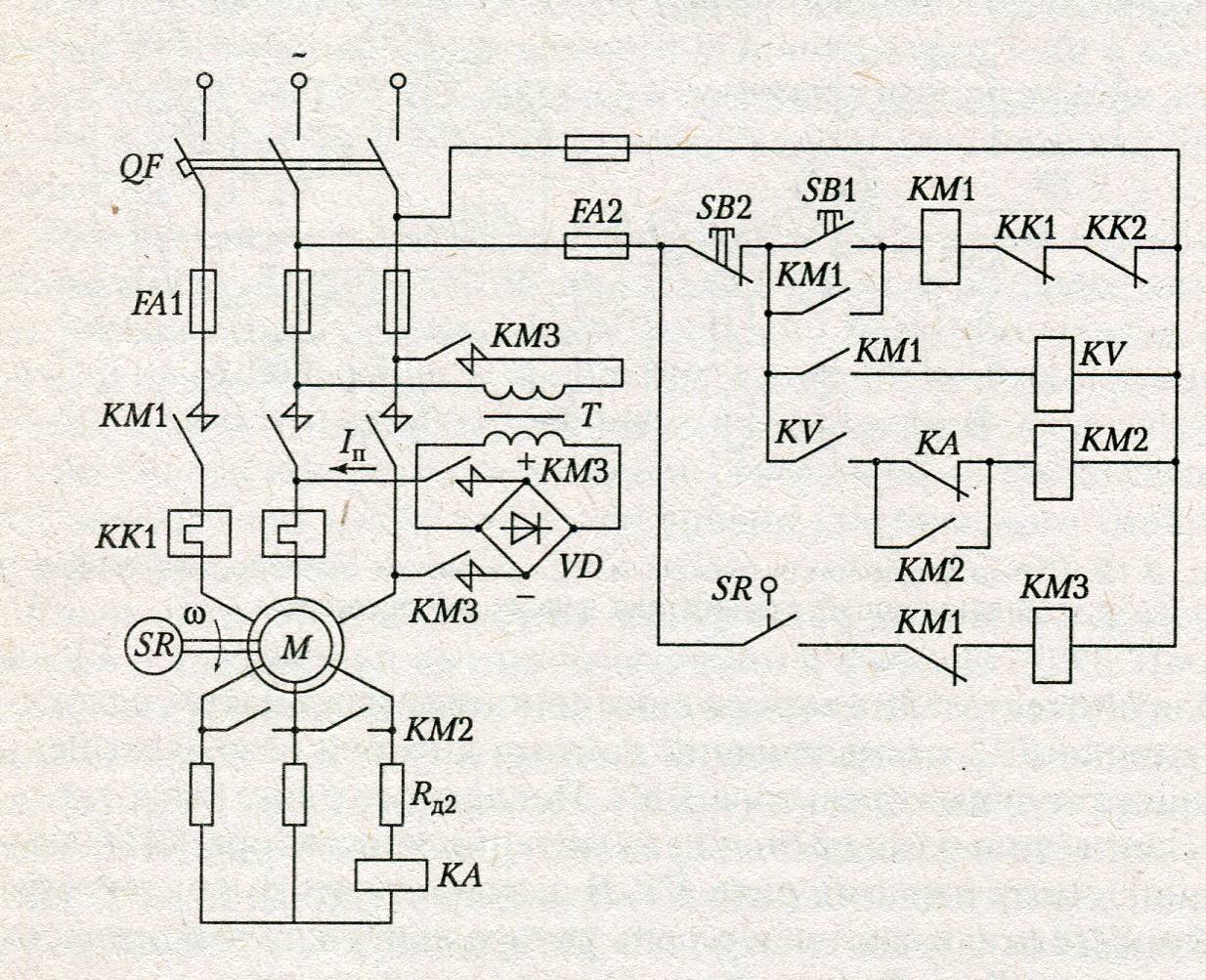 Рис. 2.6. Схема управления пуском и динамическим торможением АД с фазным ротором Схема работает следующим образом. После подачи с помощью автоматического выключателя QFнапряжения для пуска двигателя нажимается кнопка SВ1, включается контактор КМ1, силовыми контактами которого статор двигателя подключается к сети. Бросок тока в цепи ротора вызовет включение реле тока КА и размыкание цепи контактора ускорения КМ2. Тем самым разбег двигателя начнется с пусковым резистором Rд2 в цепи ротора. Включение контактора КМ1приводит также к шунтированию кнопки SВ1, размыканию цепи катушки контактора торможения КМ3и включению промежуточного реле напряжения КV, что, тем не менее, не приведет к включению контактора КМ2, так как до этого в этой цепи разомкнулся контакт реле КА. По мере увеличения частоты вращения двигателя уменьшаются ЭДС и ток в роторе. При некотором значении тока в роторе, равном току отпускания реле КА,оно отключится и своим размыкающим контактом замкнет цепь питания контактора КМ2. Тот включится, зашунтирует пусковой резистор Rд2, и двигатель выйдет на свою естественную характеристику. Следует отметить, что вращение двигателя вызовет замыкание контакта реле частоты вращения SR в цепи контактора КМ3, однако он не сработает, так как до этого разомкнулся контакт контактора КМ1. Для перевода двигателя в тормозной режим нажимается кнопка SВ2. Контактор КМ1 теряет питание и отключает АДот сети переменного тока. Благодаря замыканию контактов КМ1включится контактор торможения КМ3,контакты которого замкнут цепь питания обмотки статора от выпрямителя VD),подключенного к трансформатору Т,и тем самым двигатель переводится в режим динамического торможения. Одновременно с этим потеряют питание аппараты КV и КМ2, что приведет к вводу в цепь ротора резистора Rд2. Двигатель начинает тормозиться. При частоте вращения двигателя, близкой к нулю, реле контроля частоты вращения SR разомкнет свой контакт в цепи катушки контактора КМ3. Он отключится и прекратит торможение двигателя. Схема придет в исходное положение и будет готова к последующей работе. Принцип действия схемы не изменится, если катушку реле тока КА включить в фазу статора, а не ротора.
Эта панель входит в состав нормализованной серии панелей управления двигателей с фазным и короткозамкнутым ротором и обеспечивает пуск двигателей в две ступени и динамическое торможение по принципу времени (рис. 2.7). При подаче на схему напряжений постоянного 220 В и переменного 380 В тока (замыкание рубильников Q1, Q2 и автомата QF)включается реле времени КТ1, чем подготавливается двигатель к пуску с полным пусковым резистором в цепи ротора. Одновременно с этим, если рукоятка командоконтроллера находится в нулевой (средней) позиции и максимально-токовые реле FА1…FА3не включены, включится реле защиты КVотпонижения питающего напряжения и подготовит схему к работе. Пуск двигателя осуществляется по любой из двух искусственных характеристик или естественной характеристике, для чего рукоятка SА должна устанавливаться соответственно в положение 1, 2 или 3. При переводе рукоятки в любое из указанных положений SА включаются линейный контактор КМ2,подключающий двигатель к сети, контактор управления тормозом КМ5, подключающий к сети катушку YА электромагнитного тормоза, который при этом растормаживает двигатель, и реле времени КТ3, управляющее процессом динамического торможения. При переводе SА в положение 2 или 3включаются контакторы ускорения КМ3и КМ4и двигатель начинает разгоняться.  Рис. 2.7.Схема асинхронного электропривода с использованием типовой панели управления Торможение двигателя происходит при переводе рукоятки SА в нулевое (среднее) положение. При этом отключатся контакторы КМ2и КМ3и включится контактор динамического торможения КМ1, который подключит двигатель к источнику постоянного тока. В результате этого будет идти интенсивный процесс комбинированного (механического и динамического) торможения двигателя, которое закончится после отсчета реле КТ3 своей вы держки времени, соответствующей времени торможения. |