Трансформация координат из одной СК в другую. Практическая работа 7. Трансформация координат из одной ск в другую
 Скачать 1.88 Mb. Скачать 1.88 Mb.
|

|
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РЕСПУБЛИКИ КАЗАХСТАН СӘТБАЕВ УНИВЕРСИТЕТІ
Институт Геологии, Нефти и Горного дела Кафедра Маркшейдерское дело и геодезия Практическая работа На тему: Трансформация координат из одной СК в другую
Ф.И.О. обучающегося Толеутаева Айгерим Шифр специальности 5В071100 Ф.И.О. преподавателя Чернов А.В Алматы 2021 Цель: Вычислить ориентирующие углы земной хорды по наблюдениям спутника с двух пунктов земной поверхности. Ход работы: Преобразование геодезических координат из системы А в систему Б выполняют по формулам  где B, L – геодезические широта и долгота, выраженные в единицах плоского угла H - геодезическая высота, м; ΔB, ΔL, ΔH - поправки к геодезическим координатам точки Поправки к геодезическим координатам вычисляют по формулам:  где ΔB, ΔL - поправки к геодезическим широте, долготе, угл. с; ΔH - поправка к геодезической высоте, м; B, L - геодезические широта и долгота, рад; H- геодезическая высота, м; Δx, Δy, Δz – линейные элементы трансформирования систем координат при переходе из системы A в систему Б, м; ωx, ωy, ωz – угловые параметры трансформирования систем координат при переходе из системы А в систему Б, угл. с; m – масштабный элемент трансформирования систем координат при переходе из системы А в систему Б;  M - радиус кривизны меридианного сечения N - радиус кривизны первого вертикала aБ, аА – большие полуоси эллипсоидов в системах координат Б и А соответственно; При преобразовании геодезических координат из системы А в систему Б в формуле используют значения геодезических координат в системе А, а при обратном преобразовании – в системе Б, и знак поправок ΔB, ΔL, ΔH, , в формуле меняют на противоположный. Формулы обеспечивают вычисление поправок к геодезическим координатам с погрешностью, не превышающей 0,3 м (в линейной мере). Для достижения погрешности не более 0,001 м выполняют вторую итерацию, т.е. учитывают значения поправок к геодезическим координатам по формулам и повторно выполняют вычисления по формулам (23). При этом  Формулы и точностные характеристики пре образований по этим формулам справедливы до широт 89°. Вывод: В данной работе были вычислены ориентирующие углы земной хорды по наблюдениям спутника с двух пунктов земной поверхности. В результате получилось ВБ - 50.630250545726057, LБ - 81.908907479660130, HБ – 310.0034. 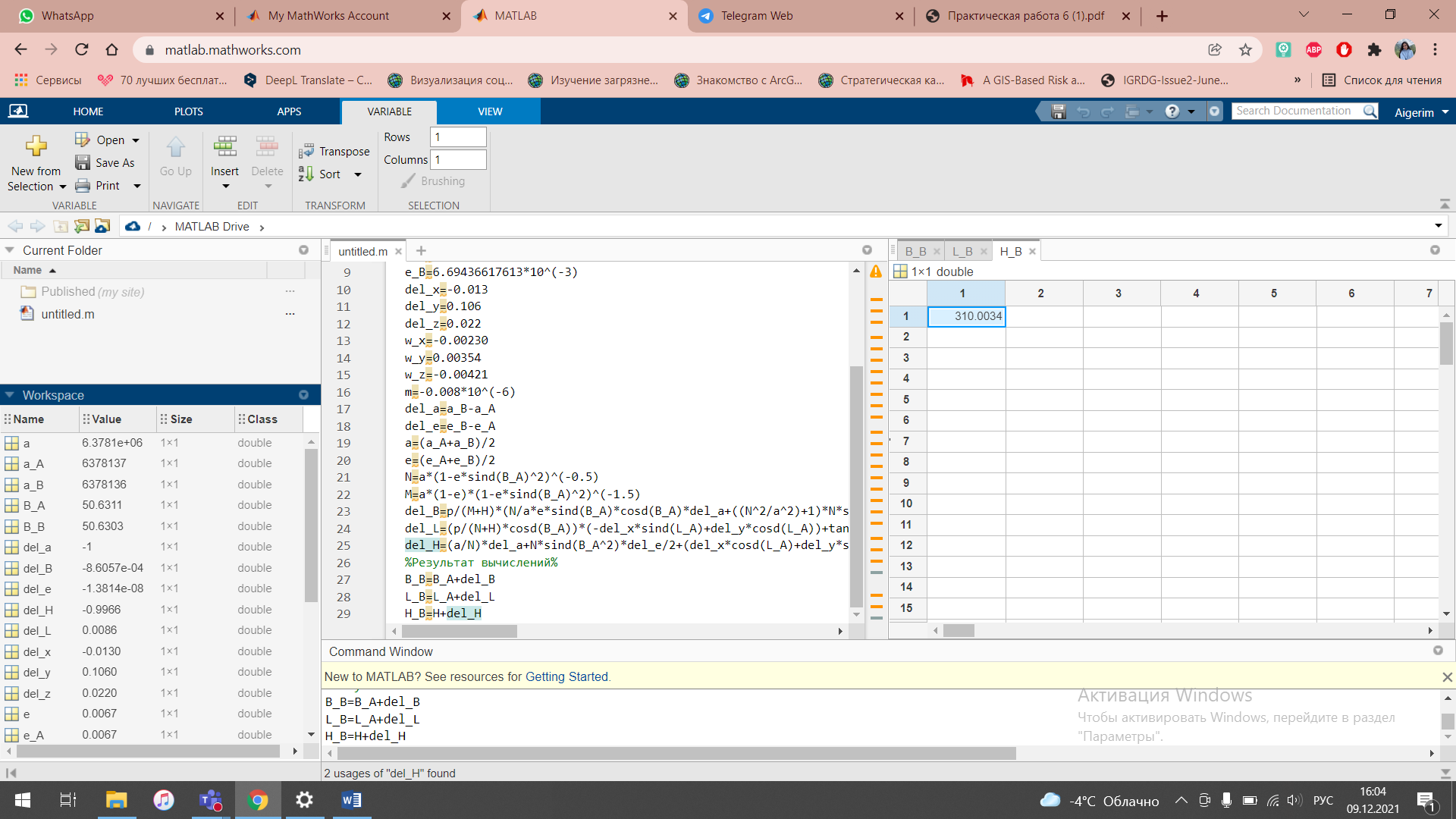  %Координаты первой точки, корпус ГМК% B_A=(((52/60)+37)/60)+50 L_A=(((01/60)+54)/60)+81 H=311 p=206265 a_A=6378137.0 a_B=6378136.0 e_A=6.69437999014*10^(-3) e_B=6.69436617613*10^(-3) del_x=-0.013 del_y=0.106 del_z=0.022 w_x=-0.00230 w_y=0.00354 w_z=-0.00421 m=-0.008*10^(-6) del_a=a_B-a_A del_e=e_B-e_A a=(a_A+a_B)/2 e=(e_A+e_B)/2 N=a*(1-e*sind(B_A)^2)^(-0.5) M=a*(1-e)*(1-e*sind(B_A)^2)^(-1.5) del_B=p/(M+H)*(N/a*e*sind(B_A)*cosd(B_A)*del_a+((N^2/a^2)+1)*N*sind(B_A)*cosd(B_A)*(del_e/2)-(del_x*cosd(L_A)+del_y*sind(L_A))*sind(B_A)+del_z*cosd(B_A))- w_x*sind(L_A)*(1+e*cosd(2*B_A))+w_y*cosd(L_A)*(1+e*cosd(2*B_A))- p*m*e*sind(B_A)*cosd(B_A) del_L=(p/(N+H)*cosd(B_A))*(-del_x*sind(L_A)+del_y*cosd(L_A))+tand(B_A)*(1- e)*(w_x*cosd(L_A)+w_y*sind(L_A))-w_z del_H=(a/N)*del_a+N*sind(B_A^2)*del_e/2+(del_x*cosd(L_A)+del_y*sind(L_A))*cosd(B_A)+del_z*sind(B_A)-N*e*sind(B_A)*cosd(B_A)*((w_x/p)*sind(L_A)- (w_y/p)*cosd(L_A))+(a^2/N+H)*m %Результат вычислений% B_B=B_A+del_B L_B=L_A+del_L H_B=H+del_H |
