Отчет по дисциплине: «Электрический привод» на тему: «Трехфазная модель асинхронного двигателя». отчёт 1 по лб эл.машины. Трехфазная модель асинхронного двигателя
 Скачать 0.67 Mb. Скачать 0.67 Mb.
|

|
Отчет по дисциплине: «Электрический привод» на тему: «Трехфазная модель асинхронного двигателя» В этом примере показана асинхронная машина с разомкнутым контуром регулирования скорости на промышленном двигателе мощностью 3 л. с. 220 В. Луис-А. Дессен и Р. Шампань (Ecole de Technology Superieure, Монреаль)  Описание Трехфазный двигатель мощностью 3 л.с., 220 В, 1725 об в мин питается от синусоидального ШИМ-инвертора. Базовая частота синусоидальной опорной волны составляет 60 Гц, а частота треугольной несущей волны установлена на 1980 Гц. ШИМ-инвертор полностью построен из стандартных блоков Simulink. Его выход проходит через блоки источников управляемого напряжения, прежде чем быть поданным на обмотки статора блока асинхронной машины. Ротор машины закорочен. Его индуктивность утечки статора L1s устанавливается в два раза больше его фактического значения, чтобы имитировать эффект сглаживающего реактора, размещенного между инвертором и машиной. Крутящий момент нагрузки, приложенный к валу машины, является постоянным и устанавливается на его номинальное значение 11,9 н*м. Двигатель запускается из стойла. Заданное значение скорости устанавливается равным 1,0 или 1725 об / мин. Эта скорость достигается через 0,9 с. Моделирование Взгляните на параметры моделирования. Максимальный временной шаг был ограничен 10 микросекундами. Это необходимо из-за относительно высокой частоты переключения (1980 Гц) инвертора. Обратите внимание, что токи ротора и статора довольно шумны, несмотря на использование сглаживающего реактора. Шум, вносимый ШИМ-инвертором, также наблюдается в форме электромагнитного крутящего момента Te. Однако инерция двигателя предотвращает появление этого шума в форме сигнала скорости двигателя. Среднеквадратичное значение основной составляющей линейного напряжения на клеммах статора машины измеряется с помощью блока Фурье. Наконец, обратите внимание на выход ШИМ-инвертора. Используйте зум на осциллографе vab, чтобы увеличить масштаб сигнала.                                     t,cек rpm t,cек i(t) 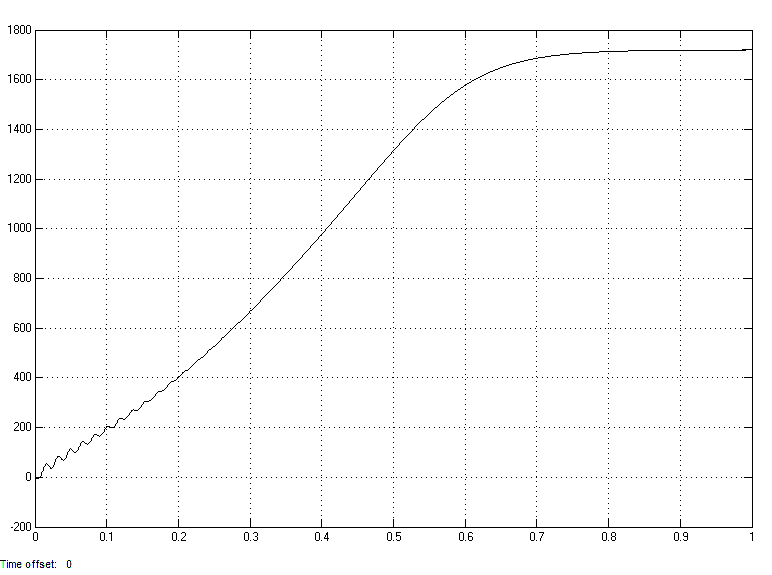 Вывод: исходя из графика видно, что заданное значение скорости 1725 об / мин при моменте нагрузки 11,9 н*м достигается через 0,9 с. 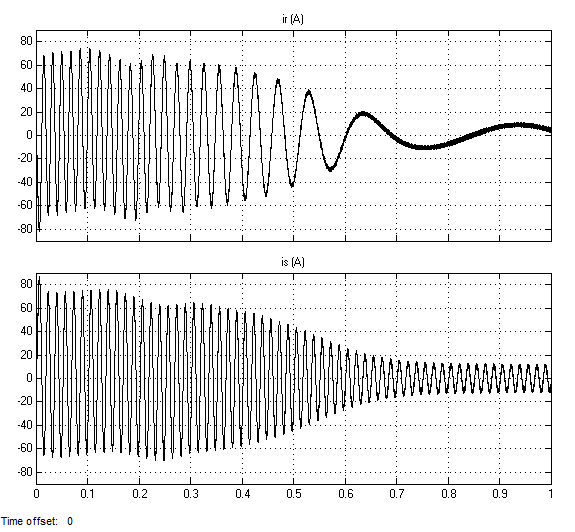 Вывод: токи ротора и статора довольно шумны, несмотря на использование сглаживающего реактора.                           Te t,cек u(t) t,сек 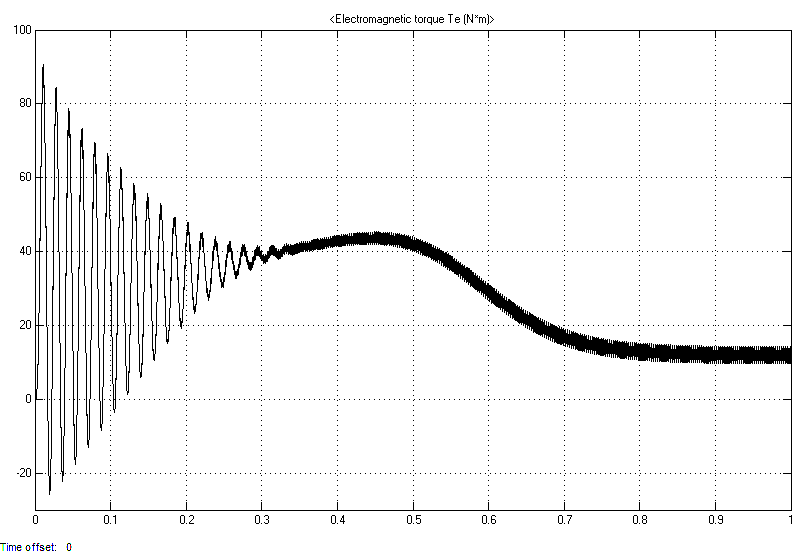 Вывод: шум, вносимый ШИМ-инвертором, также наблюдается в форме электромагнитного крутящего момента. Однако инерция двигателя предотвращает появление этого шума в форме сигнала скорости двигателя. 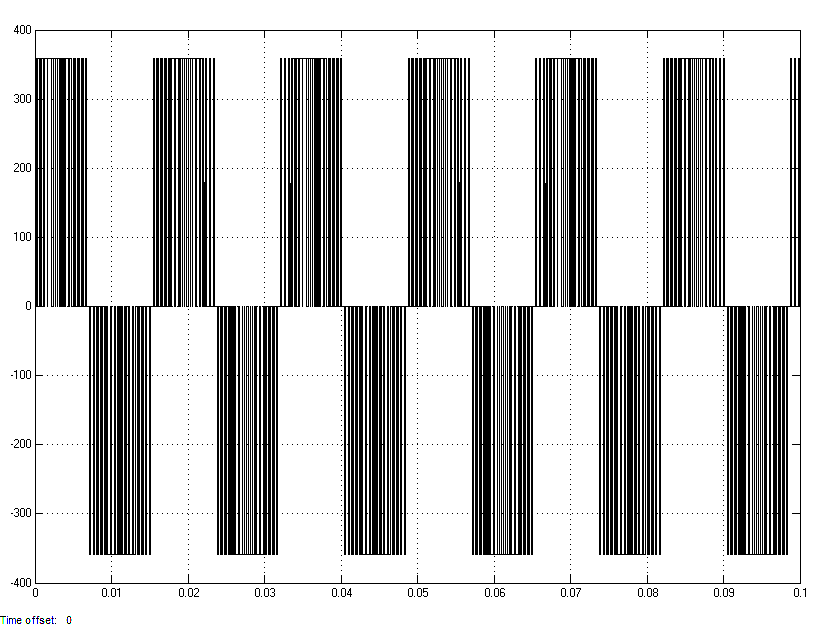 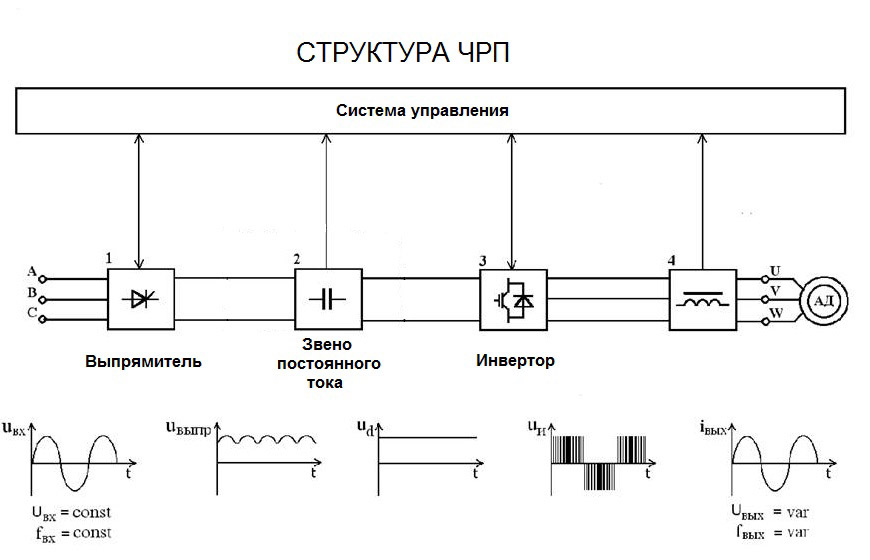 Конструкция асинхронного электродвигателя: Трехфазный асинхронный электродвигатель, как и любой электродвигатель, состоит из двух основных частей - статора и ротора. Статор - неподвижная часть, ротор - вращающаяся часть. Ротор размещается внутри статора. Между ротором и статором имеется небольшое расстояние, называемое воздушным зазором, обычно 0,5-2 мм. Статор состоит из корпуса и сердечника с обмоткой. Сердечник статора собирается из тонколистовой технической стали толщиной обычно 0,5 мм, покрытой изоляционным лаком. Шихтованная конструкция сердечника способствует значительному снижению вихревых токов, возникающих в процессе перемагничивания сердечника вращающимся магнитным полем. Обмотки статора располагаются в пазах сердечника. Принцип действия трехфазного асинхронного электродвигателя основан на способности трехфазной обмотки при включении ее в сеть трехфазного тока создавать вращающееся магнитное поле. Преимущества асинхронного двигателя Конструкция. По сравнению с другими типами электродвигателей асинхронный двигатель имеет наиболее простую конструкцию. С одной стороны это объясняется использованием стандартной трехфазной системы электроснабжения, с другой – принципом действия агрегата. Данная особенность обуславливает еще одно важное преимущество — невысокую цену асинхронных приводов. Подключение. Благодаря тому, что в стандартной трехфазной системе питания фазы сдвинуты на 120°, для формирования вращающегося поля не нужны дополнительные элементы и преобразования. Эксплуатация. Затраты на эксплуатацию асинхронного электродвигателя крайне малы, а обслуживание не представляет никаких сложностей. При правильной установке и эксплуатации двигателя замена подшипников производится раз в 15-20 лет. Недостатки асинхронных двигателейСкорость вращения ротора. Скорость вращения вала двигателя зависит от частоты питающей сети (стандартные значения в промышленности – 50 и 60 Гц) и от количества полюсов обмоток статора. Это можно считать недостатком в том случае, когда необходимо в процессе работы менять скорость вращения. Для решения данной проблемы были разработаны многоскоростные асинхронные двигатели, у которых имеется возможность переключения обмоток. Кроме того, в современном оборудовании управление скоростью реализуется за счет преобразователей частоты. Скольжение. Эффект скольжения проявляется в том, что частота вращения ротора всегда будет меньше частоты вращения поля внутри статора. Это заложено в принцип работы асинхронного двигателя и отражено в его названии. Скольжение также зависит от механической нагрузки на валу.При необходимости скольжение можно скомпенсировать, а скорость вращения сделать независимой от нагрузки при помощи преобразователя частоты. Величина напряжения питания. В сырых и влажных помещениях, где действуют повышенные требования к электробезопасности, применение асинхронного электродвигателя может быть невозможным. Дело в том, что из-за конструктивных особенностей такие двигатели практически не производятся на напряжение питания менее 220 В. В таких случаях применяют приводы постоянного тока, рассчитанные на напряжение 48 В и менее, либо используют гидравлические или пневматические приводы. Чувствительность к напряжению питания. При отклонении напряжения питания более чем на 5% параметры двигателя могут отличаться от номинальных, а сам агрегат может перегреваться. Кроме того, при понижении напряжения падет момент электродвигателя, который квадратически зависит от напряжения. При использовании преобразователя частоты скорость вращения меняется путем изменения величины и частоты питающего напряжения. Принципиально, что отношение напряжения к частоте должно быть константой. Пусковой ток. Большой пусковой ток – проблема асинхронных двигателей мощностью более 10 кВт. При пуске ток может превышать номинальный в 5-8 раз и длиться несколько секунд. Из-за этого негативного эффекта мощные двигатели нежелательно подключать напрямую. Чаще всего для понижения пускового тока применяют схему «Звезда-Треугольник», устройства плавного пуска и преобразователи частоты. Также можно использовать асинхронные двигатели с фазным ротором. Пусковой момент. В силу электрических и механических переходных процессов в момент пуска двигатель обладает крайне низким КПД и большой реактивностью. Из-за низкого пускового момента привод может не справиться с началом вращения тяжелых механизмов. Этот же недостаток приводит к нагреву двигателя при пуске. Отсюда возникает другая проблема – ограничение количества пусков в единицу времени. При использовании частотного преобразователя момент при пуске и на низких частотах может быть увеличен за счет повышения напряжения. Сфера применения: Асинхронный электродвигатель нашел применение во всех сферах деятельности человека. Те что питаются от одной фазы (от 220В) можно встретить в исполнительных механизмах малой мощности или в бытовой технике и инструменте, на производстве в трёхфазных сетях. Механической характеристикой двигателя называется зависимость частоты вращения ротора от момента на валу n = f (M2). Так как при нагрузке момент холостого хода мал, то M2 ≈ M и механическая характеристика представляется зависимостью n = f (M). Если учесть взаимосвязь s = (n1 - n) / n1, то механическую характеристику можно получить, представив ее графическую зависимость в координатах n и М 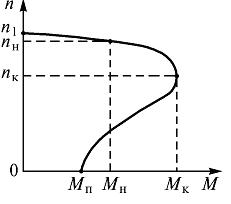 Механическая характеристика асинхронного двигателя Рабочие характеристики асинхронного двигателя представляют собой графически выраженные зависимости частоты вращения n2, КПД η, полезного момента (момента на валу) М2, коэффициента мощности cos φ, и тока статора I1 от полезной мощности Р2 при U1 = const f1 = const. Скоростная характеристика n2 = f(P2). Частота вращения ротора асинхронного двигателя n2 = n1(1 - s). Скольжение s = Pэ2/Pэм, т. е. скольжение асинхронного двигателя, а следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности. Пренебрегая электрическими потерями в роторе в режиме холостого хода, можно принять Рэ2 = 0, а поэтому s ≈ 0 и n20 ≈ n1. По мере увеличения нагрузки на валу асинхронного двигателя отношение s = Pэ2/Pэм растет, достигая значений 0,01 - 0,08 при номинальной нагрузке. В соответствии с этим зависимость n2 = f(P2) представляет собой кривую, слабо наклоненную к оси абсцисс. Однако при увеличении активного сопротивления ротора двигателя r2' угол наклона этой кривой увеличивается. В этом случае изменения частоты асинхронного двигателя n2 при колебаниях нагрузки Р2 возрастают. Объясняется это тем, что с увеличением r2' возрастают электрические потери в роторе. 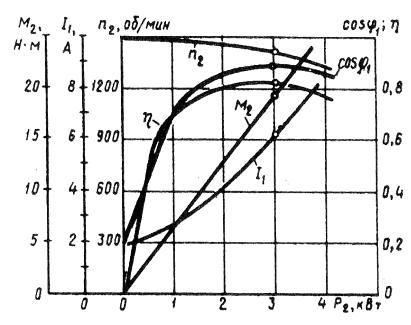 Рабочие характеристики асинхронного двигателя Способы регулирования скорости асинхронного двигателя: 1) Регулирование частоты вращения асинхронного двигателя путем введения резисторов в цепь ротора. Введение резисторов в цепь ротора приводит к увеличению потерь мощности и снижению частоты вращения ротора двигателя за счет увеличения скольжения. 2) Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре. Изменение напряжения, подводимого к обмотке статора асинхронного двигателя, позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока со стандартным напряжением U1ном и статором электродвигателя включается регулятор напряжения. При регулировании частоты вращения асинхронного двигателя изменением напряжения, подводимого к обмотке статора, критический момент Мкр асинхронного двигателя изменяется пропорционально квадрату подводимого к двигателю напряжения Uрет , а скольжение от Uрег не зависит. 3) Регулирование частоты вращения асинхронного двигателя изменением частоты питающего напряжения. Так как частота вращения магнитного поля статора nо = 60f/р, то регулирование частоты вращения асинхронного двигателя можно производить изменением частоты питающего напряжения. Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость nо магнитного поля статора.   Схема частотного электропривода Механические характеристики асинхронного двигателя при частотном регулировании 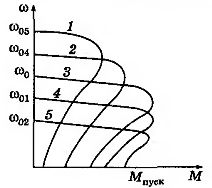 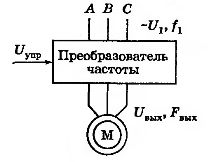 ШИМ или PWM (широтно-импульсная модуляция, по-английски pulse-width modulation) – это способ управления подачей мощности к нагрузке. Управление заключается в изменении длительности импульса при постоянной частоте следования импульсов. Широтно-импульсная модуляция бывает аналоговой, цифровой, двоичной и троичной. Применение широтно-импульсной модуляции позволяет повысить КПД электрических преобразователей, особенно это касается импульсных преобразователей, составляющих сегодня основу вторичных источников питания различных электронных аппаратов. 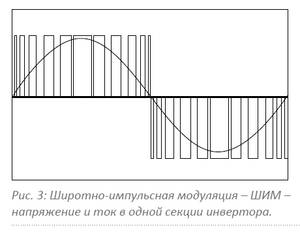 |