Контрольная точка_2. Контрольная_точка_2. Тяговый расчёт и определение производительности самосвала
 Скачать 2.43 Mb. Скачать 2.43 Mb.
|

ТЯГОВЫЙ РАСЧЁТ И ОПРЕДЕЛЕНИЕ ПРОИЗВОДИТЕЛЬНОСТИ САМОСВАЛАЗадание: Изучить назначение, классификацию, конструкцию грузовых автомобилей, применяемых в строительстве. Определить возможную силу тяги автосамосвала по условию сцепления с дорогой на каждом участке пути. Определить скорость движения груженного и порожнего автомобиля на каждом участке пути. Определить продолжительность движения автомобиля на каждом участке пути в оба конца. Автомобильный транспорт в строительстве используется для доставки различных грузов на строительные объекты. Также автомобили являются базовыми машинами, на которых монтируются краны, буровые установки, монтажные вышки, экскаваторы и другое оборудование. Грузовые автомобили разделяются на: Автомобили общего назначения с кузовом в виде открытой платформы и бортами, автомобили повышенной проходимости, автомобилитягачи, с прицепами, полуприцепами и роспусками грузоподъёмностью до 14 т; Самосвалы, применяющиеся для перевозки грузов, не повреждающихся при сбрасывании (камень, песок и др.) Грузоподъёмность до 75 т. Разгружаются наклоном кузова назад, реже на 3 стороны. Специальные: бетоновозы, автобетоносмесители; цементовозы и другие, изготовленные на базе автомобилей общего назначения. 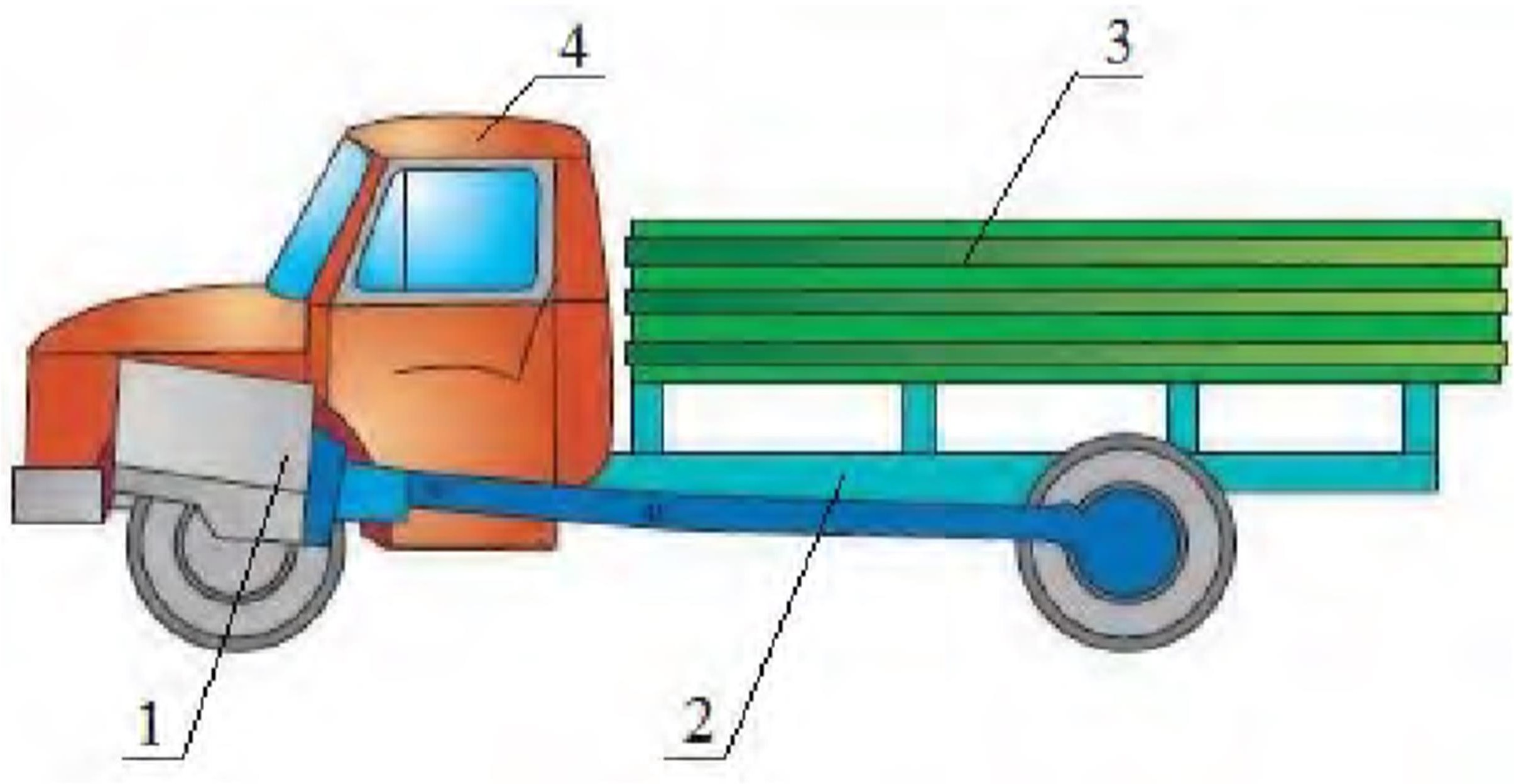 Рис.1.Основныеэлементыгрузовогоавтомобиляобщегоназначения Основными элементами автомобиля являются (рис. 1) двигатель 1, шасси 2, кузов 3 и кабина управления 4. Конструкцию шасси во многом определяет колёсная формула автомобиля, которая записывается в следующем виде: a×b. Здесь a – количество колёс; b – количество приводных колёс. Наиболее распространены автомобили с колёсными формулами: 4×2; 4×4; 6×4; 6×6. На рисунке 2 представлена кинематическая схема грузового автомобиля повышенной проходимости с колёсной формулой 4×4. Вращающий момент от двигателя 2 передаётся через муфту сцепления 3 на коробку перемены передач, согласующую частоту вращения вала двигателя колёс с частотой вращения колёс 1 и 7. В случае автоматической коробки передач вместо муфты сцепления используется гидротрансформатор. Далее с помощью карданного вала 6 вращающий момент передаётся на раздаточную коробку 10, распределяющую его между передним 9 и задним 8 ведущими мостами посредством карданных валов 5. Ведущий мост автомобиля включает главную коническую передачу, дифференциал, позволяющий колесам вращаться с различной частотой на криволинейных участках пути, и две полуоси, передающие вращение колёсам. Передний ведущий мост 9 имеет управляемые колёса 1, поворот которых осуществляется посредством системы рулевого управления. 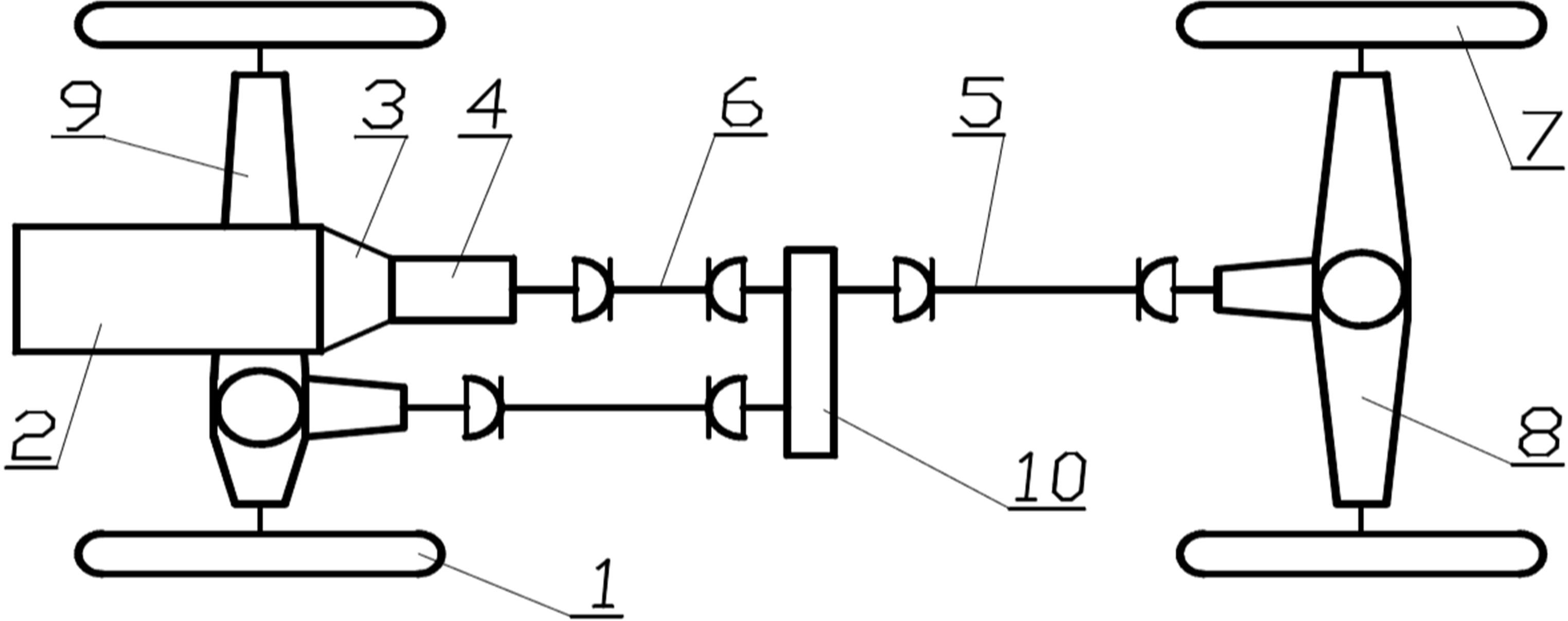 Рис.2.Кинематическаясхемагрузовогоавтомобилясколёснойформулой4×4 Также автомобиль оборудуется тормозной системой для снижения скорости и остановки машины. Шарнирно-сочленённые самосвалы представляют собой двух, а чаще трёхосные машины, состоящие из двух шарнирно-сочленённых полурам (рис. 3). Грузовая полурама 1 на двух осях с кузовом 2 подвижно соединена с приводной одноосной полурамой 3, на которой расположен привод 4 и кабина управления 5. Кузов поднимается при помощи двух длинноходовых гидроцилиндров 6. При этом происходит автоматический подъём задней заслонки кузова 7 при помощи тяг. Трансмиссия таких самосвалов включает автоматическую планетарную коробку передач с гидротрансформатором, раздаточную коробку, систему трансмиссионных валов, а также межосевые и межколёсные дифференциалы с возможностью блокировки. 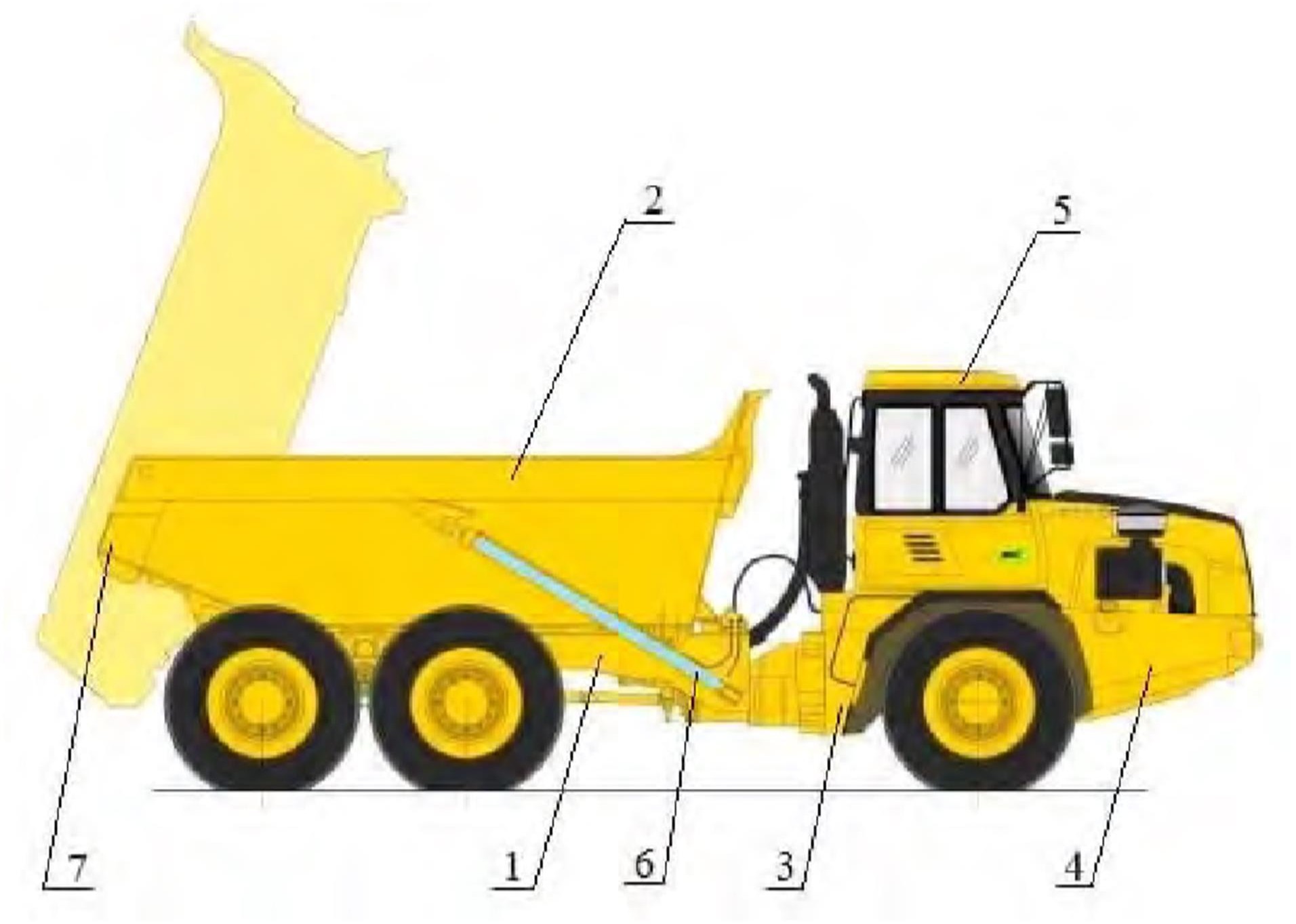 Согласование режимов работы трансмиссии и двигателя выполняет электронная система, реализующая плавное переключение передач под нагрузкой без разрыва потока мощности, что обеспечивает плавное движение и долговечность машины. Тормозная система гидравлическая с полностью закрытыми многодисковыми тормозными механизмами в масляной ванне. Подвижное соединение полурам имеет две степени свободы и обеспечивает поворот машины с помощью «излома» рамы посредством гидроцилиндров, а также относительный поворот частей рамы вокруг продольной оси автомобиля. Данная особенность обеспечивает хорошую приспосабливаемость шасси к сложному рельефу местности, постоянный контакт всех колес с грунтом, что в совокупности с широкими шинами колёс и полным приводом обуславливает высокие внедорожные свойства, манёвренность и высокую тяговую способность этих машин. Согласование режимов работы трансмиссии и двигателя выполняет электронная система, реализующая плавное переключение передач под нагрузкой без разрыва потока мощности, что обеспечивает плавное движение и долговечность машины. Тормозная система гидравлическая с полностью закрытыми многодисковыми тормозными механизмами в масляной ванне. Подвижное соединение полурам имеет две степени свободы и обеспечивает поворот машины с помощью «излома» рамы посредством гидроцилиндров, а также относительный поворот частей рамы вокруг продольной оси автомобиля. Данная особенность обеспечивает хорошую приспосабливаемость шасси к сложному рельефу местности, постоянный контакт всех колес с грунтом, что в совокупности с широкими шинами колёс и полным приводом обуславливает высокие внедорожные свойства, манёвренность и высокую тяговую способность этих машин.Рис.3.Схемашарнирно-сочленённогосамосвала Применение сочленённых самосвалов оправдано при необходимости перемещать значительные объёмы инертных или иных материалов (грунты, шламы, отходы и др.) по грунтам с малой несущей способностью, заболоченным или песчаным, со сложным рельефом местности, со значительными уклонами (работа в карьерах, начальные этапы строительства дорог и объектов инфраструктуры и др.). Для данного вида машин не требуется устройство укреплённых подъездных путей, как для обычных дорожных самосвалов. 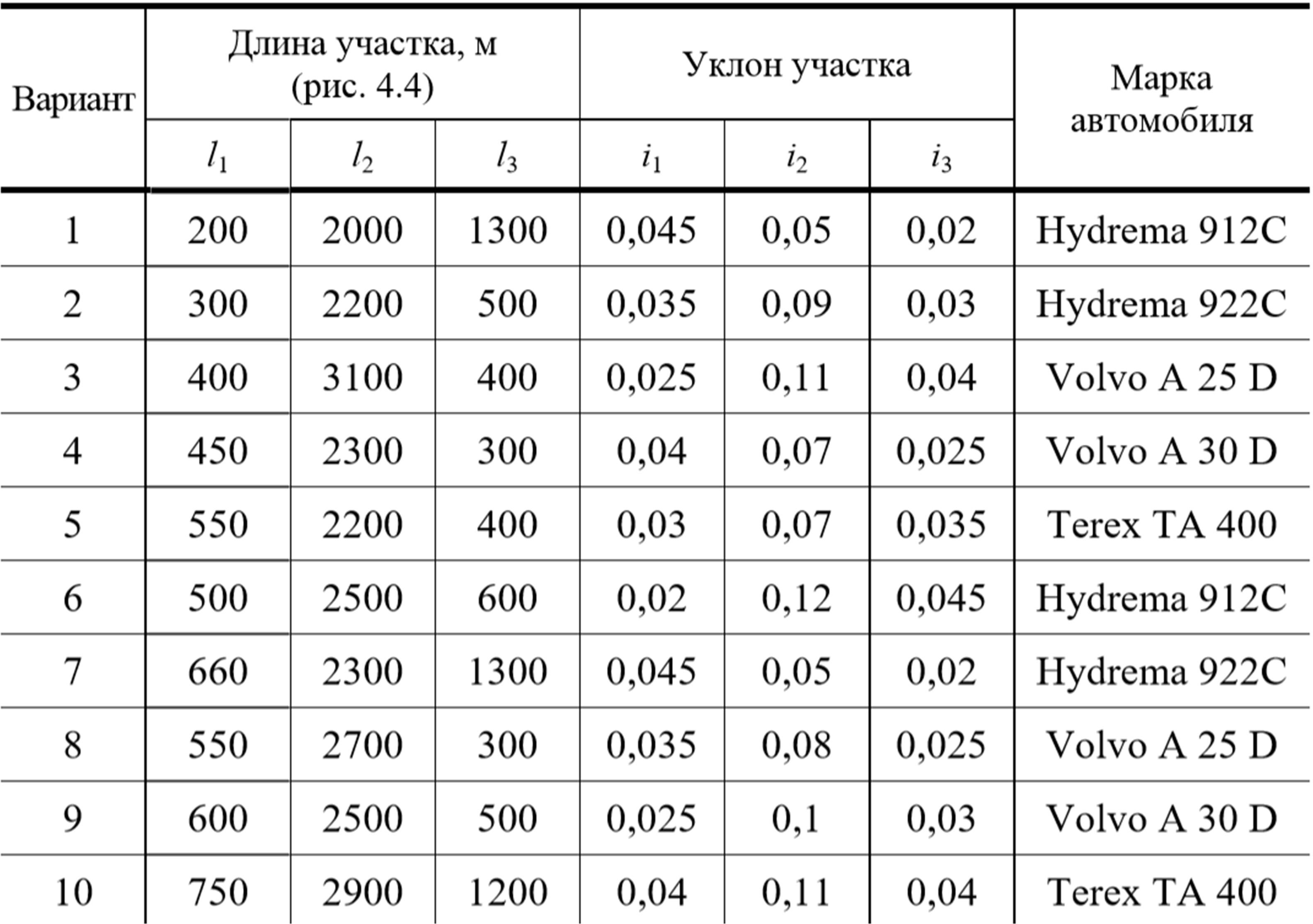 Таблица 1. Исходные данные для расчёта Таблица 1. Исходные данные для расчётаМетодика расчётаВычерчиваем схему трассы движения автомобиля (рис. 4) с указанием числовых значений её параметров в соответствии с предложенным вариантом задания. где – коэффициент сцепления шин с дорогой (табл. 2); Gсц – сцепной вес автомобиля, Н (вес машины, приходящийся на ведущие колёса, для полноприводных машин соответствует весу автомобиля с грузом) (табл. 3). 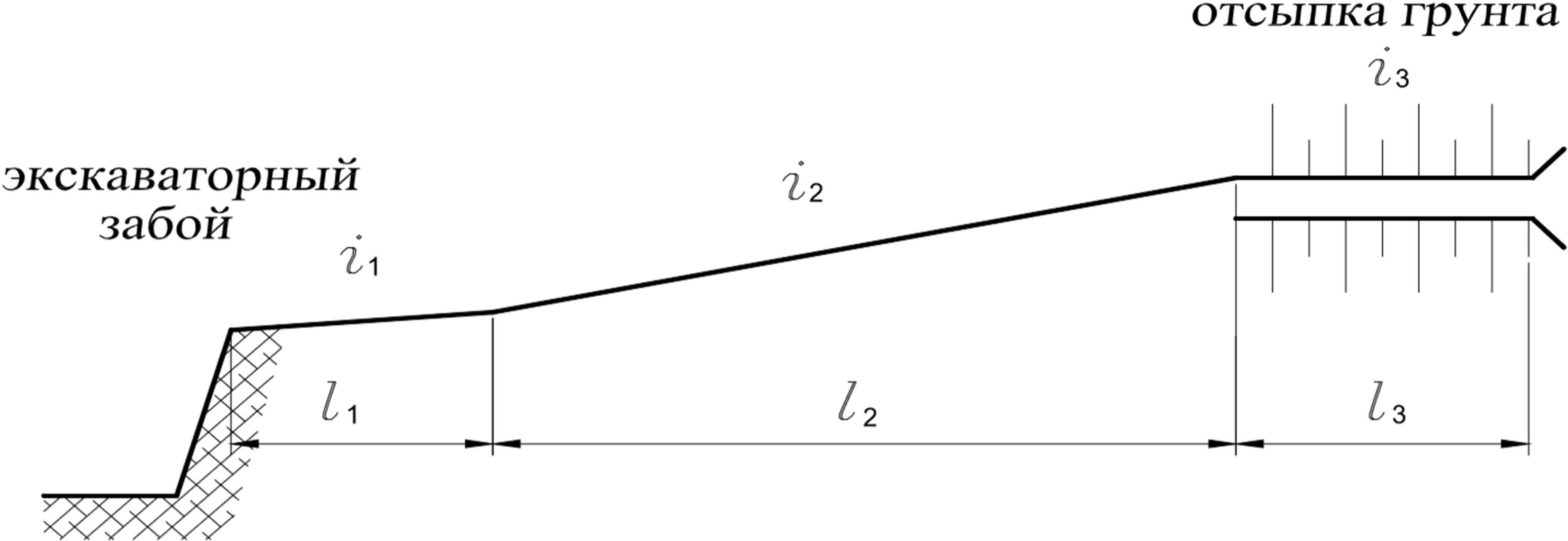 Рис.4.Схематрассыдвиженияавтомобиля 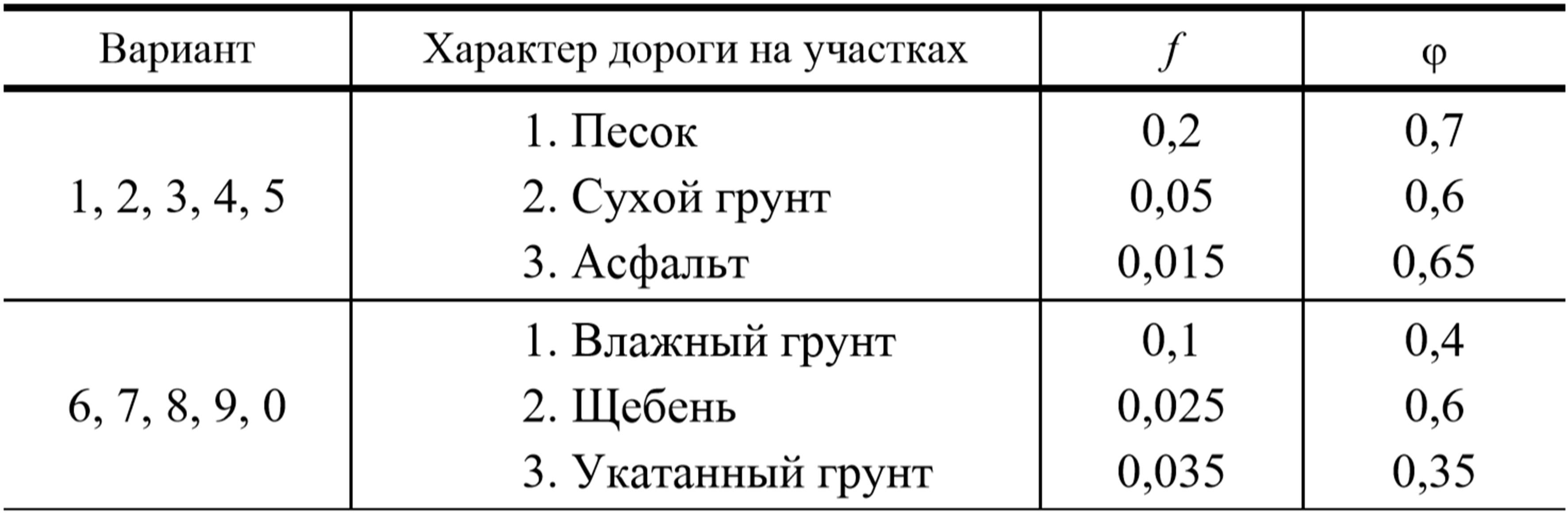 Таблица 2. Значения коэффициентов удельного сопротивления движению автомобилей f и сцепления шин с дорогой Таблица 2. Значения коэффициентов удельного сопротивления движению автомобилей f и сцепления шин с дорогой 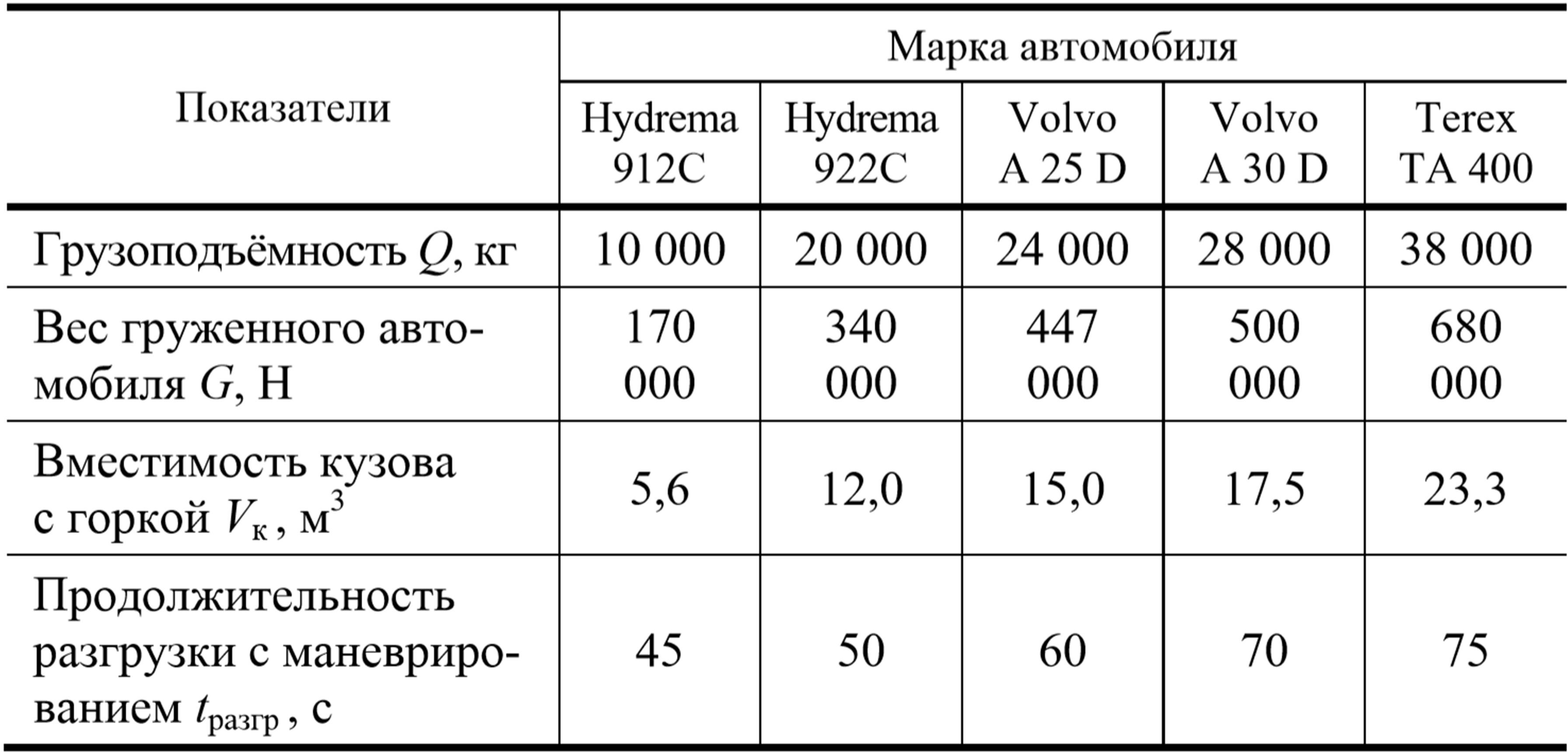 Таблица 3. Технические характеристики автомобилей Таблица 3. Технические характеристики автомобилейОпределяем сопротивление передвижению машины на каждом участке пути W= G * (f + i) , где G – вес груженного автомобиля, Н (табл. 3); f – удельное сопротивление движению (табл. 2); i – уклон участка пути (табл. 1). Для каждого участка пути проверяем условие движения самосвала без буксования Pсц ≥ W  Рассчитываем коэффициент полного сопротивления движению груженного ψ и порожнего ψ0 автомобиля для каждого участка по формулам: Рассчитываем коэффициент полного сопротивления движению груженного ψ и порожнего ψ0 автомобиля для каждого участка по формулам:Пользуясь значениями коэффициента полного сопротивления движению автомобиля, определяем по тягово-скоростной характеристике (рис. 5) скорость движения груженного и порожнего автомобиля на каждом участке пути. Тягово-скоростная характеристика (рис. 5) представляет собой зависимость тягового усилия на колесе (сплошная кривая) и усилия торможения (пунктирная кривая) от скорости автомобиля. Лучи, исходящие из начала координат, представляют коэффициент полного сопротивления движения ψ. Также на диаграммах изображены две вертикальные линии, левая из которых соответствует массе автомобиля без груза, а правая – массе автомобиля с полной загрузкой. Для определения скорости самосвала в заданных условиях необходимо выбрать луч, соответствующий коэффициенту полного сопротивления движению и найти его пересечение с линией массы машины (порожней или гружёной). Из точки пересечения проводится горизонтальная линия до пересечения с кривой тягового усилия. Координата полученной точки по горизонтальной оси диаграммы соответствует скорости автомобиля. В случае отрицательного значения коэффициента полного сопротивления движению требуется торможение автомобиля при движении вниз по уклону. В этом случае определяем скорость движения автомобиля по кривой усилия замедления (пунктирная, рис. 5). Определяем продолжительность движения на каждом участке трассы 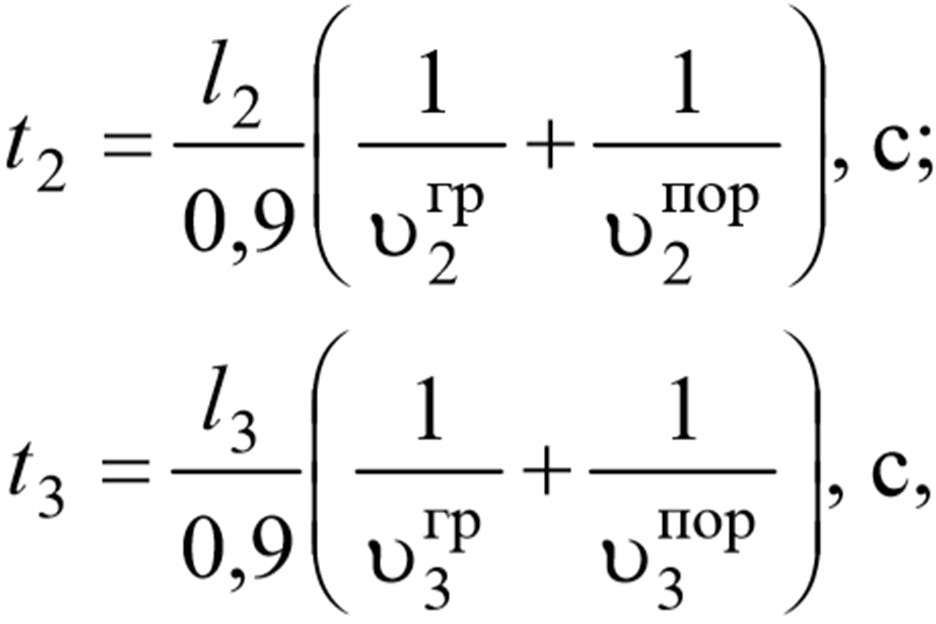 где l1,l2,l3– длины участков трассы, м (табл. 1); υгр – скорости движения груженого автомобиля на каждом участке пути, м/с; υпор – скорости движения порожнего автомобиля на участках пути, м/с; 0,9 – коэффициент, учитывающий затраты времени на ускорение и замедление движения. 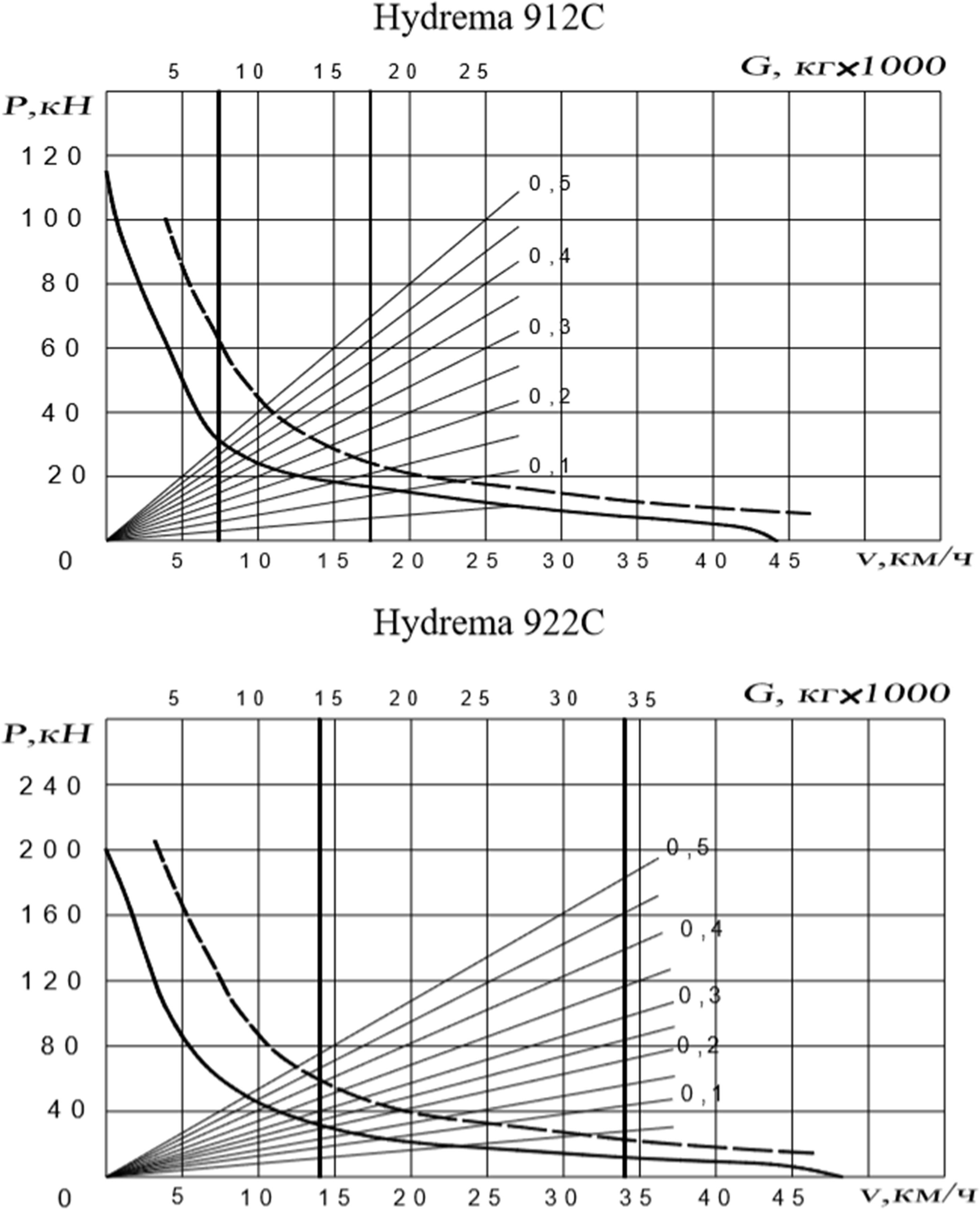 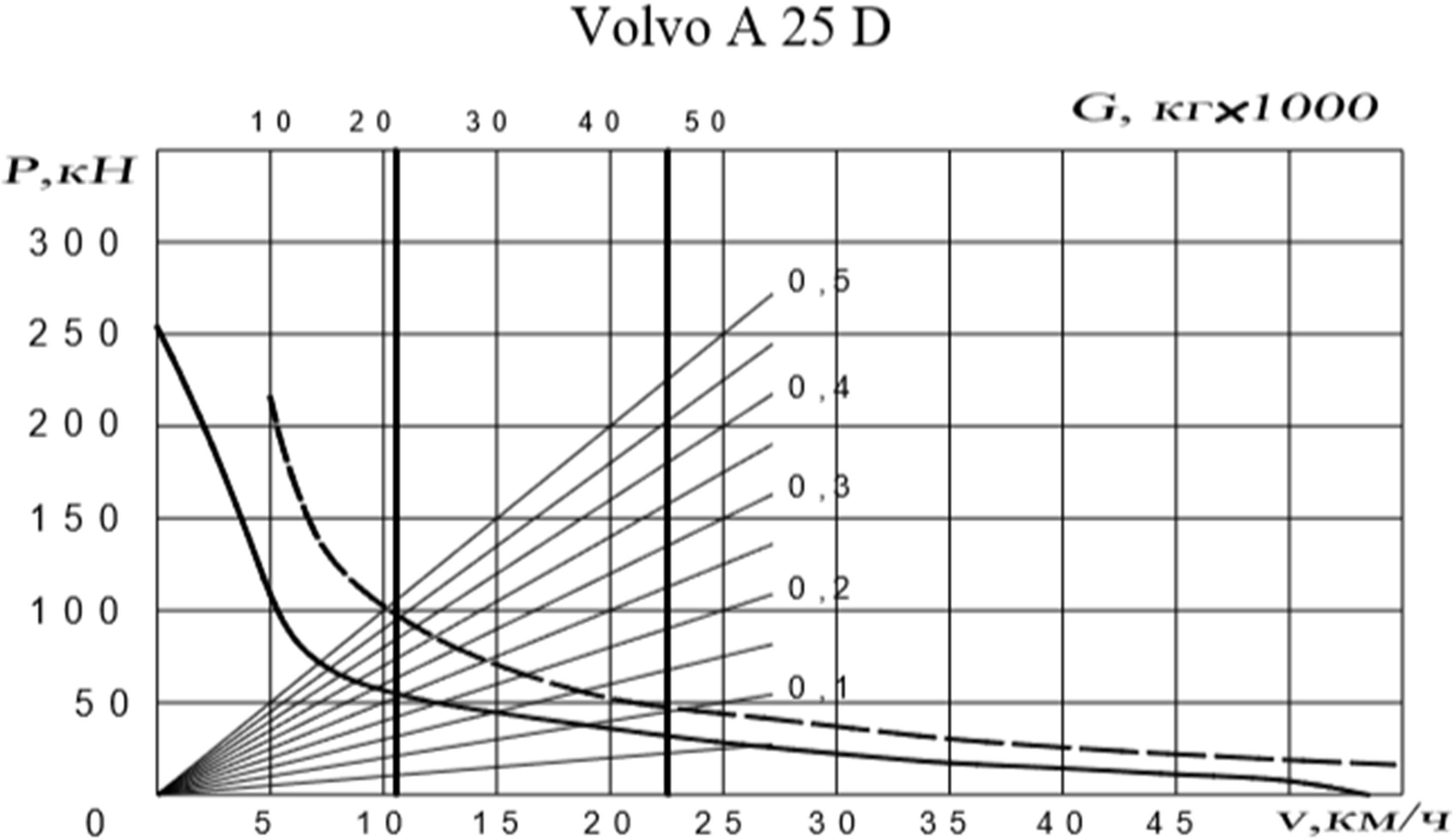 Рис.5.Тягово-скоростныехарактеристикисамосвалов  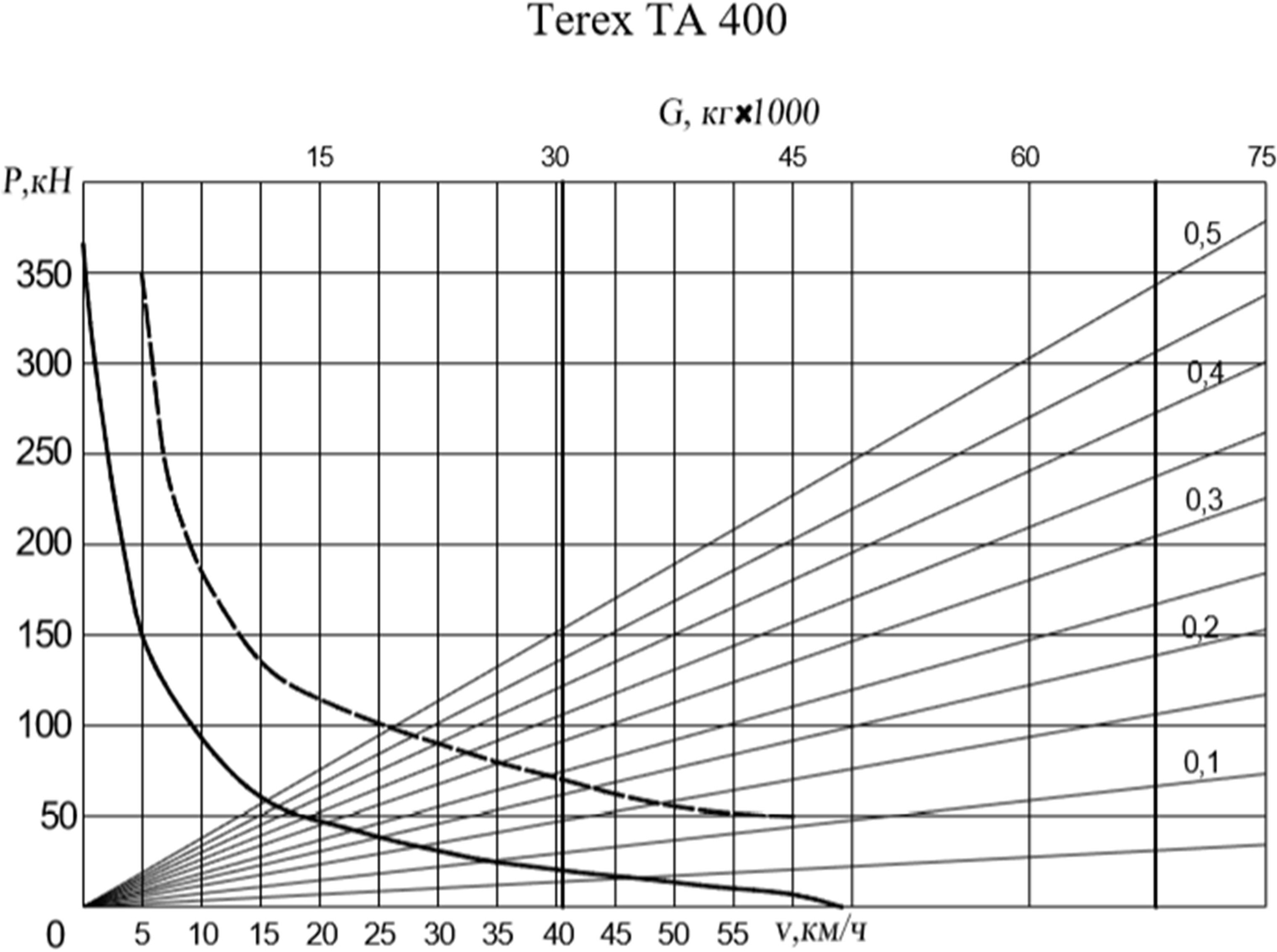 Рис.5.Тягово-скоростныехарактеристикисамосвалов.Продолжение |