безбородко. Учебник для слушателей и курсантов высших пожарнотехнических образовательных учреждений
 Скачать 40.6 Mb. Скачать 40.6 Mb.
|

|
Глава 6 ЭЛЕМЕНТЫ ТЕОРИИ ДВИЖЕНИЯ ПОЖАРНОГО АВТОМОБИЛЯ Теория движения пожарного автомобиля (ПА) рассматривает факторы, которые определяют время следования пожарного подразделения к месту вызова. В основу теории движения ПА положена теория эксплуатационных свойств автомобильных транспортных средств (АТС). Для оценки свойств конструкции ПА и его способности своевременно прибыть к месту вызова необходим анализ следующих эксплуатационных свойств: тягово-скоростных, тормозных, устойчивости движения, управляемости, маневренности, плавности хода. 6.1. Тягово-скоростные свойства пожарного автомобиля Тягово-скоростные свойства ПА определяются его способностью к движению под действием продольных (тяговых) сил ведущих колес. (Колесо называется ведущим, если к нему передается через трансмиссию крутящий момент от двигателя АТС.) Эта группа свойств состоит из тяговых свойств, позволяющих ПА преодолевать подъемы и буксировать прицепы, и скоростных свойств, позволяющих ПА двигаться с высокими скоростями, совершать разгон (приемистость) и двигаться по инерции (выбег). Для предварительной оценки тягово-скоростных свойств используется удельная мощность NG ПА, т.е. отношение мощности двигателя N, кВт, к полной массе автомобиля G, т. По НПБ 163-97 удельная мощность ПА должна быть не меньше 11 кВт/т. У отечественных серийных ПА удельная мощность меньше рекомендованного НПБ значения. Увеличить NG серийных ПА можно, если устанавливать на них двигатели с большей мощностью или не полностью использовать грузоподъемность базового шасси. Оценка тягово-скоростных свойств ПА по удельной мощности может быть только предварительной, так как часто АТС с одинаковой NG имеют различную максимальную скорость и приемистость. В нормативных документах и технической литературе нет единства в оценочных показателях (измерителях) тягово-скоростных свойств АТС. Общее число предлагаемых оценочных показателей более пятнадцати. Специфика эксплуатации и движения (внезапный выезд с непрогретым двигателем, интенсивное движение с частыми разгонами и торможениями, редкое использование выбега) позволяет выделить для оценки тягово-скоростных свойств ПА четыре основных показателя: максимальную скорость vmax ; максимальный подъем, преодолеваемый на первой передаче с постоянной скоростью (угол αmax или уклон imax ); время разгона до заданной скорости tυ; минимально устойчивую скорость vmin . Показатели vmax, αmax, tυ и vmin определяются аналитически и экспериментально. Для аналитического определения этих показателей необходимо решить дифференциальное уравнение движения ПА, справедливое для частного случая – прямолинейного движения в профиле и плане дороги (рис. 6.1). В системе отсчета 0xyz это уравнение имеет вид  , (6.1) , (6.1)где G– масса ПА, кг; δ > 1 - коэффициент учета вращающихся масс (колес, деталей трансмиссии) ПА; Рк – суммарная тяговая сила ведущих колес ПА, Н; ΡΣ=Pf+Pi+Pв суммарная сила сопротивления движению, Н; Рf– сила сопротивления качению колес ПА, Н: Рi– сила сопротивления подъему ПА, Н; Рв– сила сопротивления воздуха, Н. Решить уравнение (6.1) в общем виде сложно, так как неизвестны точные функциональные зависимости, связывающие основные силы (Рк,Рf,Рi, Рв) со скоростью АТС. Поэтому уравнение (6.1) обычно решают численными методами (на ЭВМ или графически). 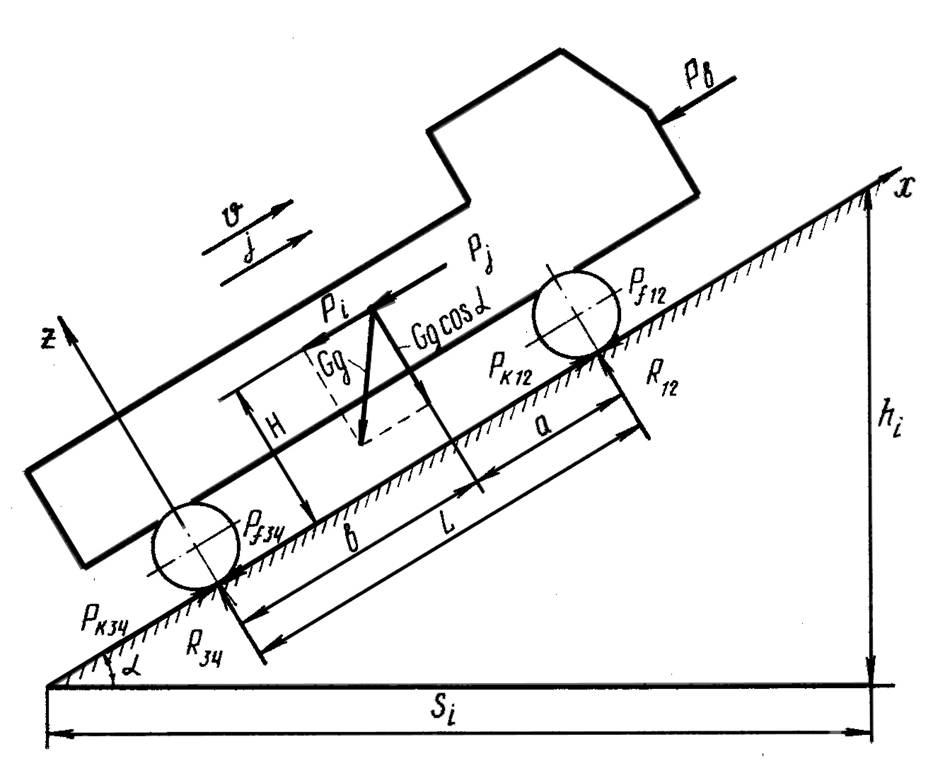 Рис. 6.1. Силы, действующие на пожарный автомобиль При определении тягово-скоростных свойств АТС численными методами наиболее часто используется метод силового баланса, метод мощностного баланса и метод динамической характеристики. Для использования этих методов необходимо знать силы, действующие на АТС при движении. 6.1.1. Тяговая сила ведущих колес Крутящий момент двигателя Мд передается через трансмиссию к ведущим колесам АТС. Приводимые в справочной литературе и технических характеристиках автомобилей данные внешних характеристик двигателей (Ne, Me) соответствуют условиям их стендовых испытаний, значительно отличающихся от условий, в которых двигатели работают на автомобилях. При стендовых испытаниях по ГОСТ 14846-81 внешние характеристики двигателя определяют при установке на него только основного оборудования (воздухоочистителя, генератора и водяного насоса), т. е. без оборудования, необходимого для обслуживания шасси (например, компрессора, гидроусилителя руля). Поэтому для определения Мд числовые значения Ме необходимо умножить на коэффициент Kc:  . (6.2) . (6.2)Для отечественных грузовых двухосных автомобилей Кс = 0,88, а для многоосных – Кc = 0,85. Условия стендовых испытаний двигателей за границей отличаются от стандартных. Поэтому при испытаниях: по SАЕ (США, Франция, Италия) – Кс = 0,81–0,84; по DIN (ФРГ) – Кс = 0,9–0,92; по В5 (Англия) – Кс = 0,83–0,85; по JIS(Япония) – Кс = 0,88–0,91. К колесам передается крутящий момент Мк> Мд. Увеличение Мд пропорционально общему передаточному числу трансмиссии. Часть крутящего момента, учитываемая коэффициентом полезного действия трансмиссии, расходуется на преодоление сил трения. Общее передаточное число трансмиссии и является произведением передаточных чисел агрегатов трансмиссии  (6.3) (6.3)где uкuрur – соответственно передаточные числа коробки передач, раздаточной коробки и главной передачи. Значения uк, uриur приводятся в технической характеристике АТС. Коэффициент полезного действия трансмиссии η является произведением КПД ее агрегатов. Для расчетов можно принимать: η= 0,9 – для грузовых двухосных автомобилей с одинарной главной передачей (42); η= 0,88 –для грузовых двухосных автомобилей с двойной главной передачей (42); η= 0,86 – для автомобилей повышенной проходимости (44); η = 0,84 – для грузовых трехосных автомобилей (64); η= 0,82 – для грузовых трехосных автомобилей повышенной проходимости (66). Суммарная тяговая сила Pк , которую может обеспечить двигатель на ведущих колесах, определяется по формуле  (6.4) (6.4)где rD – динамический радиус колеса. Динамический радиус колеса в первом приближении равен статическому радиусу, т.е. rD =rст. Значения rст приводятся в ГОСТах на пневматические шины. При отсутствии этих данных радиус rD тороидных шин вычисляется по формуле  , (6.5) , (6.5)где d – диаметр обода; λ – 0,89 0,9 – радиальная деформация профиля; bш– ширина профиля. Диаметр обода d и ширина профиля определяются из обозначения шины. Использование силы Pк (6.4) для движения АТС зависит от способности автомобильного колеса, находящегося под воздействием нормальной нагрузки Gнgвоспринимать или передавать касательные силы при взаимодействии с дорогой. Это качество автомобильного колеса и дороги принято оценивать силой сцепления шины с дорогой Pφn или коэффициентом сцепления φ. Силой сцепления шины с дорогой Pφn называют максимальное значение горизонтальной реакции Тn(рис. 6.2), пропорциональное нормальной реакции колеса Rn:  ; (6.6) ; (6.6) ; (6.7) ; (6.7) (6.8) (6.8)Для движения колеса без продольного и поперечного скольжения необходимо соблюдать условие  . (6.9) . (6.9)В зависимости от направления скольжения колеса различают коэффициенты продольного φх и поперечного φу сцепления. Коэффициент φх зависит от типа покрытия и состояния дороги, конструкции и материала шины, давления воздуха в ней, нагрузки на колеса, скорости движения, температурных условий, процента скольжения (буксования) колеса. Xn Yn Рис.6.2. Схема сил, действующих на колесо автомобиля Величина коэффициента φх в зависимости от типа и состояния дорожного покрытия может изменяться в очень широких пределах. Это изменение обусловлено не столько типом, сколько состоянием верхнего слоя дорожного покрытия. Причем тип и состояние дорожного покрытия оказывает на величину коэффициента φх значительно большее влияние, чем все другие факторы. Поэтому в справочниках φх приводится в зависимости от типа и состояния дорожного покрытия. К основным факторам, связанным с шиной и влияющим на коэффициент φх, относятся удельное давление (зависит от давления воздуха в шине и нагрузки на колесо) и тип рисунка протектора. Оба они непосредственно связаны со способностью шины выдавливать в стороны или прорывать пленку жидкости на дорожном покрытии для восстановления с ним надежного контакта. При отсутствии поперечных сил Pφn и Yn коэффициент φх возрастает с увеличением проскальзывания (буксования) шины по дороге. Максимум φх достигается при 20 – 25 % проскальзывания. При полном буксовании ведущих колес (или юзе тормозных колес) коэффициент φх может быть на 10 – 25 % меньше максимального (рис. 6.3, а). С увеличением скорости движения автомобиля коэффициент φх обычно уменьшается (рис. 6.3, б). При скорости 40 м/с он может быть в несколько раз меньше, чем при скорости 10 – 15 м/с. Определяют φх обычно экспериментально методом буксирования автомобиля с заблокированными колесами. При эксперименте регистрируют силу тяги на крюке буксира и нормальную реакцию заблокированных колес. Поэтому справочные данные по φх относятся, как правило, к коэффициенту сцепления при буксовании (юзе). Коэффициент поперечного сцепления φу обычно принимают равным коэффициенту φх и при расчетах пользуются средними значениями коэффициента сцепления φ (табл. 6.1). φх б а 3 2 1 v, м/с Рис. 6.3. Влияние на коэффициент φх различных факторов: а – изменение коэффициента φх в зависимости от проскальзывания; б – изменение коэффициента φх в зависимости от скорости качения колеса: 1 – сухая дорога с асфальтобетонным покрытием; 2 – мокрая дорога с асфальтобетонным покрытием; 3 – обледеневшая ровная дорога Таблица 6.1
При расчетах тягово-скоростных свойств АТС различием в коэффициентах сцепления колес пренебрегают и максимальную тяговую силу, которую могут обеспечить ведущие колеса по сцеплению с дорогой, определяют по формуле  (6.10) (6.10)где Rn – нормальная реакция n-го ведущего колеса. Если тяговая сила ведущих колес превышает максимальную тяговую силу, то ведущие колеса автомобиля буксуют. Для движения АТС без буксования ведущих колес необходимо выполнение условия  , (6.11) , (6.11)Выполнение условия (6.11) позволяет уменьшить время следования ПА к месту вызова в основном за счет уменьшения времени разгона tr. При разгоне ПА важно реализовать максимально возможное по дорожным условиям Рк. Если ведущие колеса ПА при разгоне пробуксовывают, то для движения реализуется меньшая Рк и, как следствие, увеличивается tr. Уменьшение Рк при буксовании ведущих колес и объясняется тем, что при появлении скольжения колес относительно дороги на 20 – 25 % уменьшается φx (см. рис. 6.3). Уменьшение φx приводит к уменьшению Pφ (6.10) и, следовательно, к уменьшению реализуемой Рк (6.11). При движении ПА с места выполнить условие (6.11) только за счет правильного выбора частоты вращения коленчатого вала двигателя и номера передачи не удается. Поэтому разгон ПА от v=0 до vmin должен происходить при частичной пробуксовке муфты сцепления. Дальнейший разгон ПА от vmin до vmax без пробуксовки ведущих колес ПА с механической коробкой передач обеспечивается за счет правильного выбора положения педали подачи топлива (частоты вращения коленчатого вала двигателя) и момента переключения на высшую передачу. 6.1.2. Сила сопротивления качению колес пожарного автомобиля Сопротивление качению колеса с пневматической шиной по недеформируемой дороге возникает в основном за счет затрат энергии на деформацию шины, так как деформации дороги незначительны. Работа, затраченная на участке 1–2 (рис. 6.4, а) на деформацию шины, больше, чем возвращенная на участке 2–3 (рис. 6.4, а) для восстановления ее формы, так как часть энергии расходуется на внутреннее трение резины. Поэтому давление pz на участке 1–2 больше, чем на участке 2–3, и равнодействующая нормальных реакций Rn, cмещенная относительно оси 0 (рис. 6.4, а) в сторону движения, препятствует качению колеса. Сопротивление качению колеса с пневматической шиной по деформируемой дороге (пашня, песок, неуплотненный снег) возникает в основном за счет затрат энергии на деформацию грунта (образование колеи) и на преодоление сил трения между колесом и грунтом (рис. 6.4, б). б в 0 0 Рис. 6.4. Схема сил, действующих на автомобильное колесо при качении: а – по твердой дороге; б – по мягкому грунту; в – условное изображение в расчетных схемах ПА при составлении уравнения движения В теории движения АТС реакцию Rn принято проводить через ось колеса 0 перпендикулярно опорной поверхности, а сопротивление качению колеса учитывать за счет силы Рfn, направленной в сторону, противоположную движению колеса в плоскости дороги (рис. 6.4, в). Сила сопротивления качению колес АТС является суммой сил сопротивления качению Рfn всех колес:  (6.12) (6.12) где fn– коэффициент сопротивления качению n-го колеса; Rn – нормальная реакция опорной поверхности n-го колеса; п – число колес. Коэффициент сопротивления fnу ведущих и ведомых колес отличается мало. Поэтому при расчетах движения ПАPf можно вычислять по формуле (рис. 6.1):  , (6.13) , (6.13)где α – угол продольного уклона дороги; f– коэффициент сопротивления качению колеса; g= 9,81 м/с2 – ускорение свободного падения. Коэффициент сопротивления качению f зависит в основном от типа и состояния дорожного покрытия, конструкции шин и давления воздуха в них. Для практических расчетов в интервалах скоростей до 80 – 100 км/ч коэффициент fможно считать постоянной величиной, зависящей только от типа и состояния дорожного покрытия (табл. 6.2). Таблица 6.2
При скоростях движения ПА, больших 80 – 100 км/ч, необходимо учитывать увеличение f. Коэффициент уменьшается с увеличением размера (и соответственно грузоподъемности) шины. Увеличение нагрузки на колесо сверх номинальной приводит к увеличению f. Например, при превышении нагрузки на колесо на 20 % сверх номинальной f увеличивается на 4 %. На дорогах с твердым покрытием f уменьшается при увеличении давления воздуха в шинах, меньшие f имеют шины с мелким рисунком протектора. Мощность Nf , кВт, необходимая для преодоления сил сопротивления качению колес АТС, определяется по формуле  . (6.14) . (6.14)Здесь v в м/с2; G в кг; g в м/с2. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||