КЛ ГПП. Учебное пособие Воронеж 2010 гоувпо Воронежский государственный технический университет
 Скачать 21.96 Mb. Скачать 21.96 Mb.
|

|
часть подачи насоса Qн будет направляться через щель 1 клапана 2 в бак Qкл, а подача насосной установки уменьшится Qну = Qн - Qкл (точка Rна рис. 4.12). При увеличении давления на выходе насоса будет увеличиваться степень открытия щели 1, следовательно, и расход через клапан Qкл, а подача Qну насосной установки будет уменьшаться. Наконец, при давлении на выходе насоса р = рmax поршень 3 полностью сместится вниз и вся подача насоса через щель 1 будет перепускаться в бак Qн = Qкл, а подача насосной установки станет равной нулю Qну = 0 (точка Dна рис. 4.12). Вторым способом изменения подачи насоса можно назвать использование регуляторов. Этот способ применим только для регулируемых насосов, т.е. для насосов, у которых имеется возможность изменения рабочего объема. На рис. 4.13,б представлена схема насосной установки, которая включает аксиально-поршневой насос 1 с наклонным диском 2 и регулятор подачи 3. Основным элементом регулятора является подпружиненный поршень 4, который кинематически связан с наклонным диском 2. Рассмотрим работу приведенной установки. Пока давление насоса мало, поршень 4 под действием пружины занимает крайнее правое положение, диск 2 наклонен под углом γmax и подача насоса максимальна. Этому режиму работы соответствует линия АСна рис 4.12. При расчетном давлении рр поршень 4 начнет сдвигаться влево (точка Сна рис. 4.12). Дальнейшее повышение давления приведет к тому, что поршень 4 будет занимать промежуточное положение, диск насоса будет установлен под углом – 0 < γ < γmax, а подача 0 < Q < Qmax. Этот режим будет соответствовать одной из точек линии СDна рис. 4.12, например, точке R. При увеличении давления на выходе насоса 1 поршень 4 будет смещаться дальше влево. Поэтому угол γ и подача насоса Q будут уменьшаться. Наконец, при давлении на выходе насоса р = рmax поршень 4 займет крайнее левое положение. Угол наклона диска γ и подача насоса Q станут равными нулю (точка D на рис. 4.12). Рассмотренные способы регулирования подачи насосов используются в технике. Второй из них требует регулируемых насосов, которые сложны в изготовлении и, следовательно, насосная установка с регулятором подачи дороже. Однако при использовании насосной установки с переливным клапаном часть подачи насоса перепускается в бак через клапан, не совершая полезной работы. Поэтому насосная установка с клапаном менее экономична в эксплуатации. Рассмотреные ранее характеристики насосов и насосных установок, работающих при постоянных (максимальных) значениях рабочих объемов. В том случае, когда в процессе работы насоса меняется его рабочий объем, для удобства анализа вводят относительный параметр, равный отношению текущего рабочего объема насоса W к максимальному Wo, т.е. e =W/Wo. (4.2) Этот параметр епринято называть параметром регулирования. С учетом параметра регулирования подача насоса на любом режиме насоса определяется зависимостью ЛЕКЦИЯ 5 5.1. Объемные гидравлические двигатели В гидравлических двигателях происходит преобразование энергии потока жидкости в механическую работу. В объемных гидродвигателях это преобразование осуществляется в замкнутых объемах (рабочих камерах), которые попеременно сообщаются с напорной и сливной полостями. Гидродвигатель– это гидромашина, «противоположная» насосу. К нему подводится жидкость под давлением, а на выходе имеет место возвратно-поступательное или вращательное движения выходного звена. По характеру движения выходного звена во всём многообразии объемных гидродвигателей выделяют две большие группы: гидравлические цилиндры(гидроцилиндры) и гидравлические моторы(гидромоторы). 5.1.1. Гидроцилиндры Гидравлическим цилиндромназывается объемный гидродвигатель с возвратно-поступательным движением выходного звена. Гидроцилиндры широко применяются в качестве исполнительных механизмов различных машин. По конструкции и принципу действия гидроцилиндры очень разнообразны (см. рис. 5.1) и классифицируются в соответствии с ГОСТ 17752-81. По направлению действия рабочей жидкости все гидроцилиндры можно разделить на две группы: одностороннего и двухстороннего действия. На рабочий орган гидроцилиндра одностороннего действия жидкость может оказывать  Рис. 5.1. Классификация гидроцилиндров давление только с одной стороны. Движение поршня вправо обеспечивается за счет давления жидкости, подводимой в левую полость гидроцилиндра. Обратное перемещение в гидроцилиндрах одностороннего действия обеспечивается другим способом. Наиболее часто это достигается за счет пружины или веса груза при вертикальном движении поршня. Перемещение рабочего органа гидроцилиндра двухстороннего действия в обоих направлениях обеспечивается за счет рабочей жидкости (рис. 5.2 и 5.3). В таких гидроцилиндрах жидкость может подводиться как в левую полость (тогда поршень движется вправо), так и в правую для обеспечения движения влево. Гидроцилиндры подразделяются также по конструкции рабочего органа. Наибольшее распространение получили цилиндры с рабочим органом в виде поршня или плунжера. Причем поршневые гидроцилиндры могут быть выполнены с односторонним (см. рис. 5.2 и 5.3) или двухсторонним штоком (см. рис. 5.4). Плунжерные гидроцилиндры (рис. 5.5) могут быть только одностороннего действия, с односторонним штоком. По характеру хода выходного звена гидроцилиндры делятся на одноступенчатые и телескопические (многоступенчатые). Телескопические гидроцилиндры представляют собой несколько вставленных друг в друга поршней (рис. 5.6). В таком гидроцилиндре поршни выдвигаются последовательно друг за другом. Телескопические гидроцилиндры применяются для получения больших перемещений. Полный КПД гидроцилиндров определяется в первую очередь величиной механического КПД, который для большинства конструкций составляет ηм = 0,85…0,95. Гидравлические потери в цилиндрах практически отсутствуют и гид-  Рис. 5.2. Схема гидроцилиндра двустороннего действия 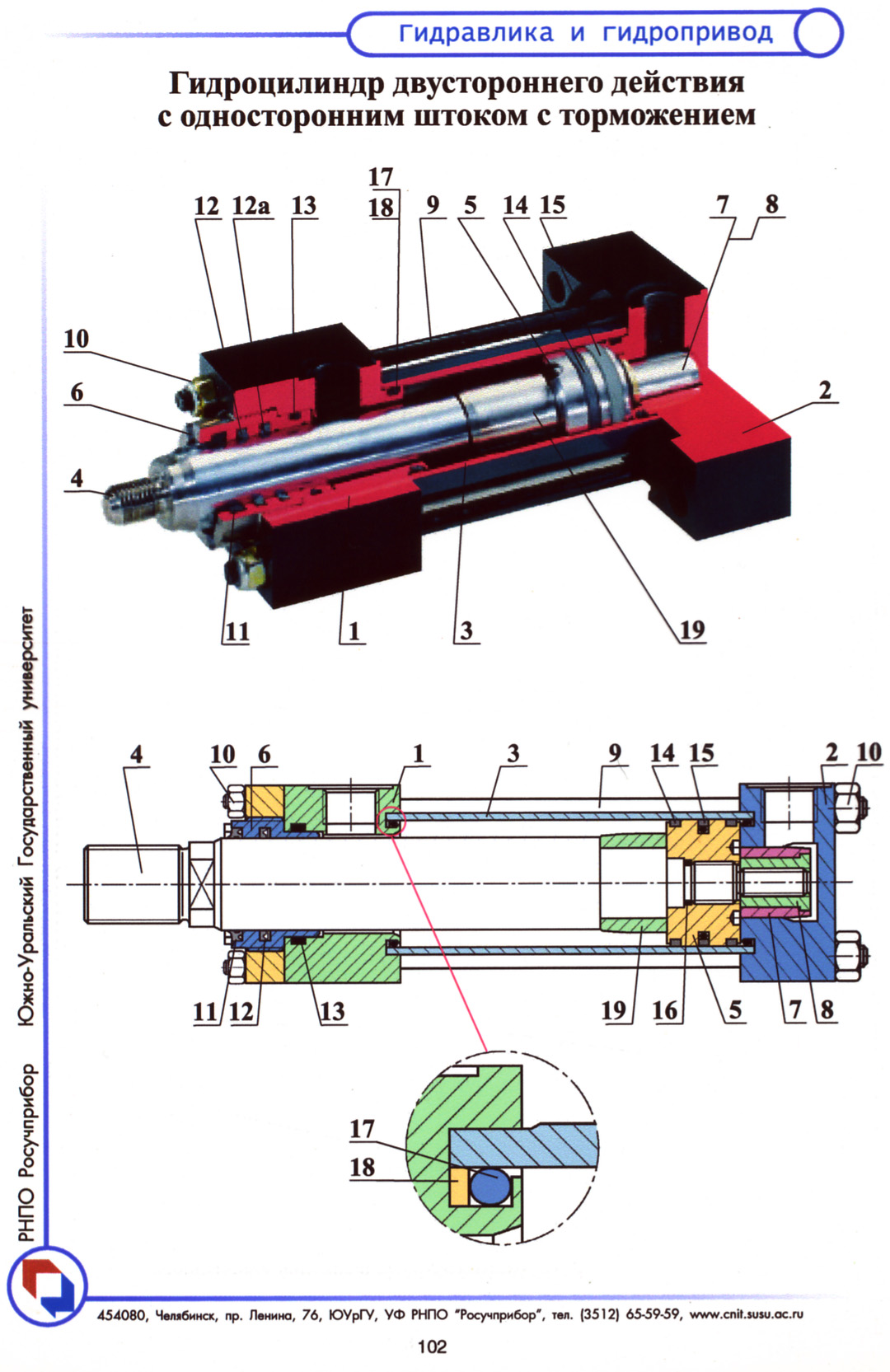 Рис. 5.3. Поршневой гидроцилиндр двустороннего действия  Рис. 5.4. Схема гидроцилиндра двустороннего действия с двусторонним штоком 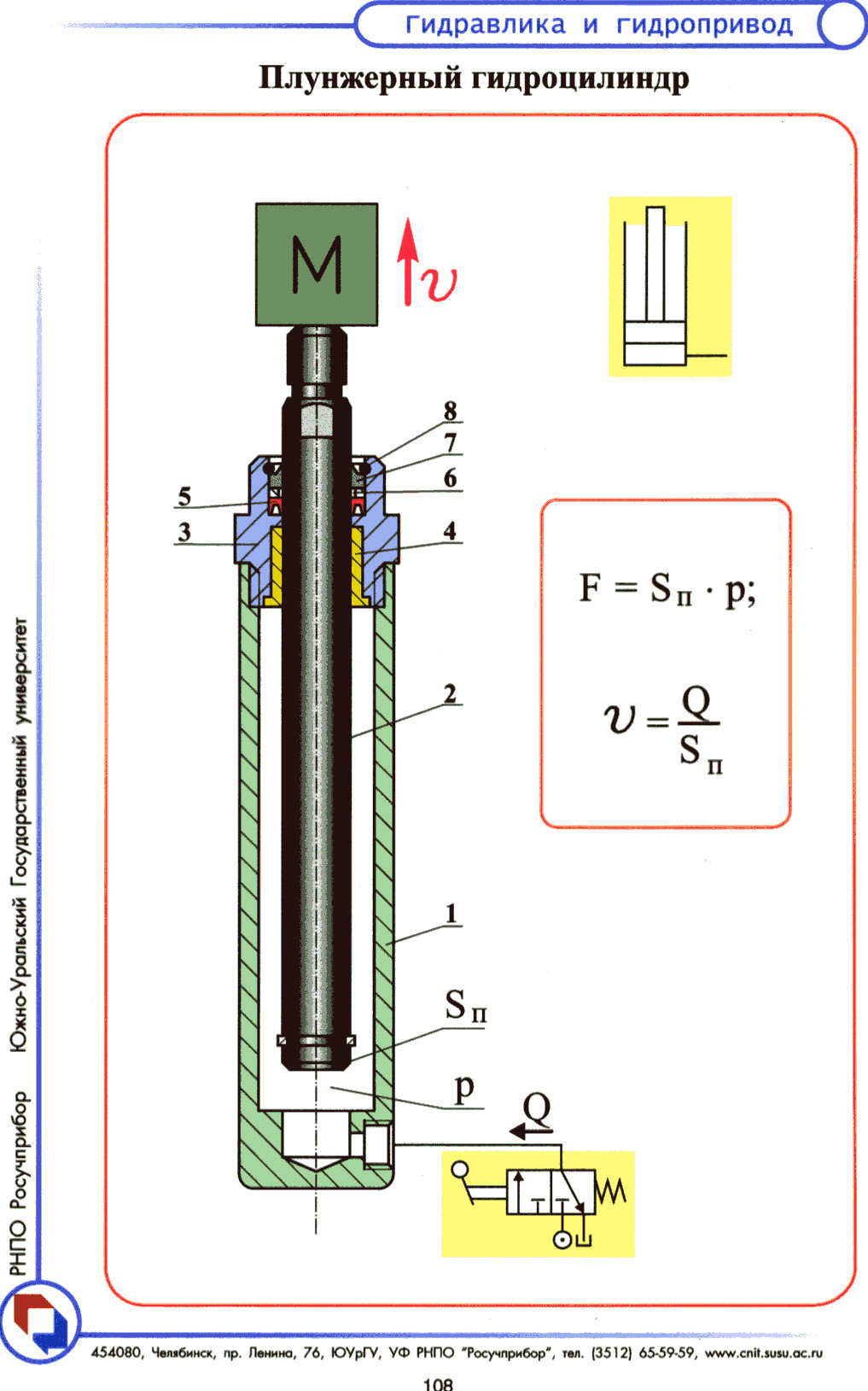 Рис. 5.5. Схема плунжерного гидроцилиндра 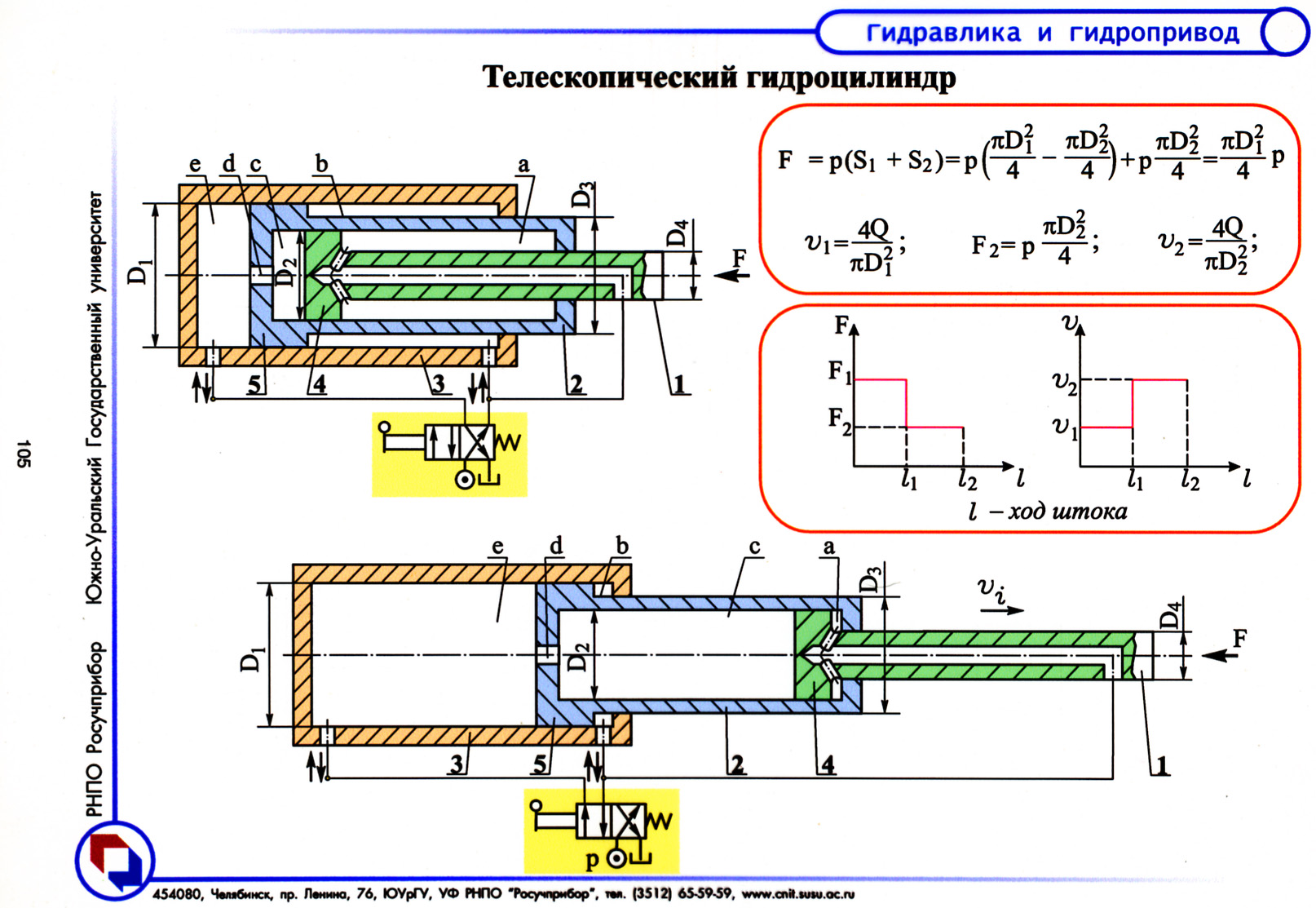 Рис. 5.6. Схема телескопического гидроцилиндра равлический КПД равен единице (ηг = 1). Объемные потери в рассматриваемых устройствах могут иметь место в зазоре между поршнем и цилиндром. Однако при уплотнении этого места резиновыми кольцами или манжетами (см. рис. 5.7) они очень малы. Тогда объемный КПД также можно считать равным единице (ηо = 1). При расчете гидроцилиндров используются две основные формулы. Первая из них связывает силу F на штоке и перепад давлений на гидроцилиндре. Вторая формула связывает расход и скорость поршня. Для обозначения гидроцилиндров на гидравлических схемах (см. рис. 5.5) используются их предельно упрощенные конструктивные изображения. 5.1.2. Гидромоторы Гидромотором называется объемный гидравлический двигатель с вращательным движением выходного звена. Классификация гидромоторов приведена на рис. 5.8. Наибольшее распространение получили роторные гидромоторы. Их конструкции ничем принципиально не отличаются от конструкций одноименных роторных насосов. Некоторые конструктивные отличия обычно вызваны обратным направлением потока мощности через гидромотор (по сравнению с насосом). Применительно к гидромоторам необходимо учитывать, что мощность к гидродвигателю подводится с потоком жидкости. В гидромоторе она преобразуется во вращательное движение, а затем реализуется в виде крутящего момента на его выходном валу. Широкое распространение получили шестеренные (рис. 5.9), пластинчатые и роторно-поршневые (рис. 5.10 и 5.11)  Рис. 5.7. Виды уплотнений в гидроцилиндрах  Рис. 5.8. Классификация гидромоторов  Рис. 5.9. Шестеренный гидромотор  Рис. 5.10. Радиально-поршневой гидромотор  Рис. 5.11. Аксиально-поршневой гидромотор гидромоторы. Наиболее широко используются роторно- поршневые гидромоторы. При этом аксиально-поршневые применяются в случае необходимости получения на выходе высоких скоростей вращения, а радиально-поршневые гидромоторы – для получения низких скоростей вращения (в частности, используются в мотор-колесах самоходных машин). Основной характеристикой геометрических размеров роторных гидромоторов, как и роторных насосов, является их рабочий объем Wo. Эта величина имеет тот же физический смысл и определяется так же, как и у насосов. Следует отметить, что гидромоторы и аналогичные им насосы могут быть с переменным рабочим объемом, т.е. регулируемыми. Полные КПД роторных гидромоторов определяются произведением объемного и механического КПД. Гидравлические потери в этих гидромоторах малы, поэтому их гидравлические КПД принимают равными единице (ηг = 1). Численные значения объемных ηо и механических ηм КПД роторных гидромашин практически не отличаются от аналогичных величин для однотипных насосов. При расчете гидромоторов используются две основные формулы. Они несколько отличаются от аналогичных формул для роторных насосов из-за противоположного направления потока мощности. Первая из этих формул связывает момент на валу гидромотора с перепадом давлений в напорном и сливном трубопроводах. Вторая формула связывает расход Q через гидромотор с частотой вращения его вала n. Для обозначения гидромоторов на принципиальных гидравлических схемах используется та же система символов, что для обозначения роторных насосов. Но в отличие от насосов у гидромоторов стрелки (треугольники) внутри окружностей, указывающие направление движения жидкости, всегда направлены внутрь окружности. Символ регулируемых гидромоторов также перечеркивается тонкой стрелкой. В заключение следует отметить, что выпускаются роторные гидромашины, которые могут работать как в режиме насоса, так и в режиме гидромотора. Такие гидромашины принято называть насос-моторами. 5.1.3. Поворотные гидродвигатели Поворотные гидродвигатели сообщают выходному звену ограниченное вращательное движение. На рис. 5.12 изображены конструктивные схемы поворотных шиберных (лопастных) гидродвигателей (однопластинчатого двухкамерного, двухлопастного четырехкамерного и трехлопастного шестикамерного). При четырехкамерном гидродвигателе развиваемый момент увеличивается, а угловая скорость уменьшается в 2 - раза. Так как применение многокамерных систем сокращает возможный угол поворота ротора, число камер более четырех применяют редко. В конструкции таких гидродвигателей много общего с пластинчатыми гидромашинами. Трение и утечки по торцам являются главными потерями энергии. Для сокращения и устранения внутренних утечек по торцам ротора и пластин применяют подгонку боковых крышек с малыми зазорами, поджим одной из крышек с гидростатической разгрузкой или радиальные упругие уплотнения из резины или полимерных материалов. На рис. 5.13 представлена конструкция поршневого поворотного гидродвигателя. Он представляет собой гидроцилиндр 5, шток 3, выступающая часть которого выполнена как зубчатая рейка, движущаяся во втулке. С рейкой-штоком сцеплена шестерня 2, жестко соединенная с выходным валом гидромотора (ось 1 вала располагается перпендикулярно плоскости чертежа). Шток совершает возвратно- поступательные движения, а выходной вал - возвратно-поворотные. 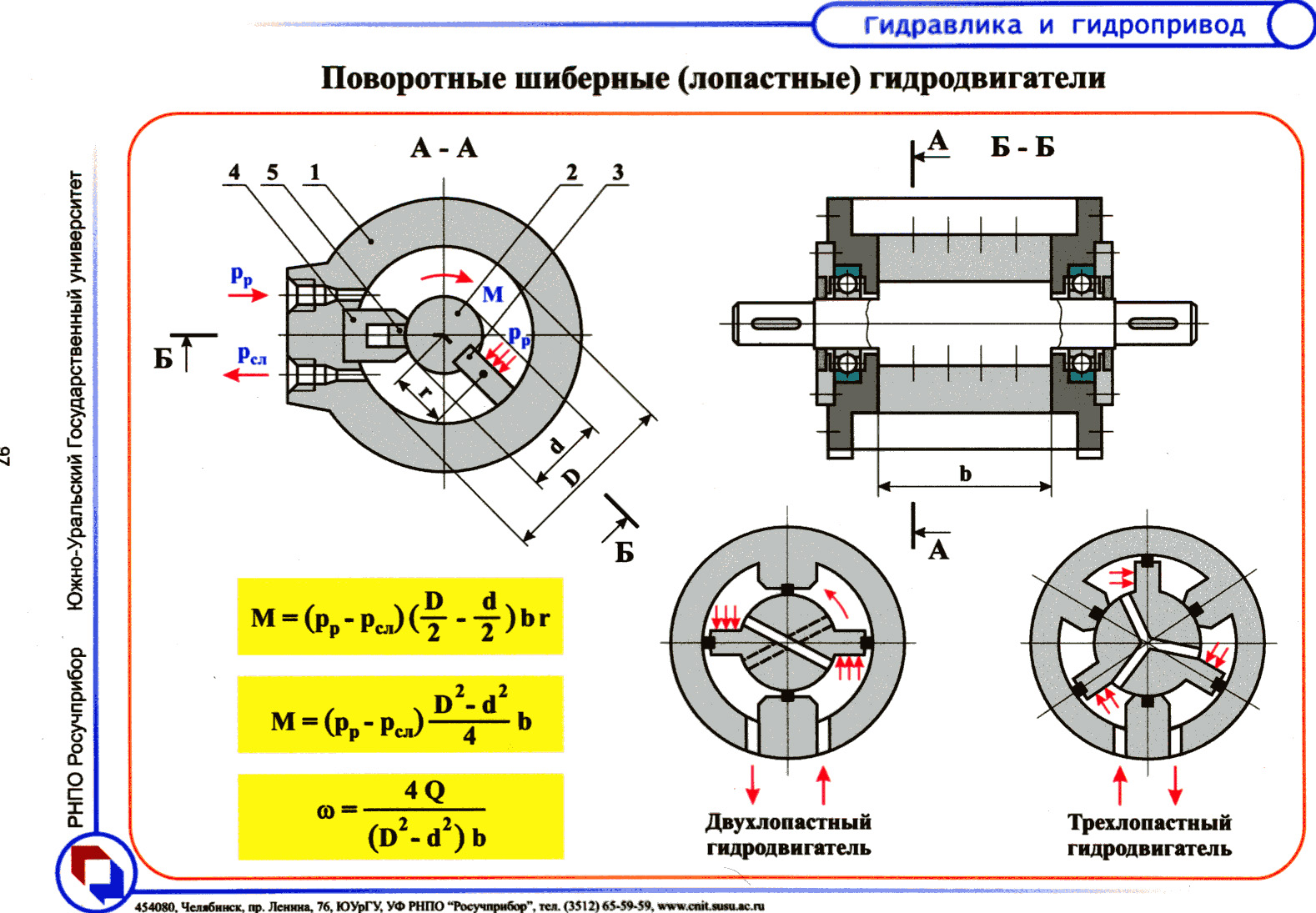 Рис. 5.12. Поворотные шиберные гидродвигатели  Рис. 5.13. Поворотный гидродвигатель поршневого типа 5.2. Элементы управления гидравлическими приводами (гидроаппараты) 5.2.1. Основные термины, определения и параметры Приведенные ниже термины и определения даны в соответствии с ГОСТ 17752-81. По характеру выполнения своих функций все гидроаппараты делятся на регулирующие и направляющие. Регулирующим называется гидроаппарат, в котором изменение соответствующего параметра потока рабочей жидкости происходит за счет частичного открытия или перекрытия проходного сечения в нем. Направляющим называется гидроаппарат, который изменяет направление потока рабочей жидкости путем полного открытия или полного перекрытия проходного сечения в нем. Под площадью проходного сечения гидроаппарата понимается минимальное значение площади живого сечения потока (выбранного нормально скорости жидкости) в нем. Эта площадь сечения определяет расход рабочей жидкости, проходящей через гидроаппарат. Основным элементом гидроаппарата является запорно-регулирующий элемент – это деталь или группа деталей, при перемещении которых частично или полностью перекрывается проходное сечение гидроаппарата. По конструкции запорно-регулирующего элемента гидроаппараты делятся на: - золотниковые, в которых запорно-регулирующим элементом является цилиндрический или плоский золотник; - крановые, в которых запорно-регулирующим элементом является плоский, цилиндрический, конический или сферический кран; - клапанные, в которых запорно-регулирующим элементом является шариковый, конусный, игольчатый или плоский (тарельчатый) клапан. По способу перенастройки гидроаппараты делятся на регулируемые и настраиваемые. Регулируемым называется гидроаппарат, в котором величина открытия проходного сечения или силовое воздействие на запорно-регулирующий элемент могут быть изменены по сигналу извне во время работы гидросистемы. |