Обзор патентов по гидроприводам. отчет по практике. Управления гидравлического привода регулирующего органа
 Скачать 353.74 Kb. Скачать 353.74 Kb.
|

|
Содержание Введение…………………………………………………………………………...3 Система управления гидравлического привода регулирующего органа……...4 Электрогидравлический рулевой привод………………………………………12 Заключение……………………………………………………………………….19 Введение Патентные поиски (патентные исследования, патентно-информационный поиск) представляют собой один из современных инструментов анализа патентоспособности объекта интеллектуальной собственности и позволяют исследовать развитие научно-технических достижений в различных областях техники. Проводя патентный обзор, насколько изучена искомая область науки (производства и др.). Исходя из данных по патентному обзору можно определить, является ли наше исследование чем-то уникальным, или же наоборот, данная идея уже существует некоторое время. СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКОГО ПРИВОДА РЕГУЛИРУЮЩЕГО ОРГАНА Электрогидравлический привод регулирующего органа применяется в системах управления гидравлических турбин для поворота лопаток направляющего аппарата, лопастей рабочего колеса и т.п. Преобразование электрических сигналов в пропорциональный им расход рабочей жидкости для управления скоростью движения регулирующих органов осуществляется регулирующими гидрораспределителями. Входными управляющими сигналами для гидрораспределителей служат электрические сигналы от автоматических регуляторов и сигналы механического перемещения их плунжеров. Схема соединения двух регулирующих пропорциональных распределителей и невозвратного клапана, реализует функцию управления расходом рабочей жидкости на выходе схемы пропорционально минимуму или максимуму отклонений гидрораспределителей от положения, в котором расход каждого из них равен нулю. Система содержит соединение выхода первого гидрораспределителя с входом неприоритетного направления расхода второго гидрораспределителя и через невозвратный клапан пропуска расхода приоритетного направления с выходом второго гидрораспределителя, при этом остальные входы гидрораспределителей соединены с магистралями рабочей жидкости в соответствии с их прямым назначением. Технический результат - повышение надежности работы системы. 1 з.п. ф-лы, 5 ил. Изобретение относится к системам электрогидравлического привода лопаток направляющего аппарата, лопастей рабочего колеса и других регулирующих поток рабочей жидкости органов гидравлических турбин любого типа. Предлагаемое устройство может использоваться как в системах управления гидравлических турбин, так и в других областях применения гидропривода с силовым выходным элементом гидроцилиндром или гидромотором. Управление гидравлическими турбинами представляет собой сложную техническую задачу. Надежность и долговечность работы турбины напрямую зависит от совершенства системы управления. Для изменения мощности турбины служат регулирующие органы: лопатки направляющего аппарата, лопасти рабочего колеса, иглы сопел и отсекатели потока, которые предназначены для изменения расхода и характеристик закрутки потока рабочей жидкости. Требующее больших перестановочных усилий изменение положения регулирующих органов осуществляется гидравлическим приводом, состоящим из главного сервомотора (гидроцилиндра) и системы управления им. Известно устройство гидромеханической колонки управления конструкции Ленинградского металлического завода (см. Гидроэнергетическое и вспомогательное оборудование гидроэлектростанций. Справочное пособие под ред. Ю.С.Васильева и Д.С.Щавелева, том № 1, основное оборудование, стр.117). Колонка управления включает однополостной вспомогательный сервомотор, перемещающий главный золотник, побудительный золотник и рычажную систему. Колонка предназначена для управления скоростью движения главного сервомотора, конструктивно входящего в состав турбины. Побудительный золотник, вспомогательный сервомотор главного золотника и главный сервомотор связаны масляными трубопроводами и образуют гидравлическую часть привода. Система управления приводом (колонка) включает канал автоматического (КАУ) и канал ручного управления (КРУ). Задача каждого из каналов - установить главный сервомотор регулирующего органа в требуемое, заранее известное положение. Это положение определяется верхним уровнем управления в случае работы КАУ или положением ручного задатчика в случае использования КРУ. Побудительный золотник, вспомогательный сервомотор, рычаг обратной связи ОС от вспомогательного сервомотора к побудительному золотнику и главный золотник образуют совокупность элементов, участвующих в работе как КАУ, так и КРУ. Канал автоматического управления содержит электронный усилитель управления катушкой электрогидравлического преобразователя (ЭГП), электрогидравлический преобразователь, датчики положения штоков ЭГП и главного сервомотора. Механическое перемещение штока ЭГП является выходом КАУ. Система ручного управления включает рычажную систему, которая механически (посредством тросовой передачи) связана со штоком главного сервомотора и непосредственно с рабочим органом ручного задатчика. Выходом системы является механическое перемещение конца рычага рассогласования (РР) между положениями ручного задатчика и главного сервомотора. Конец штока ЭГП и камень рычага рассогласования РР в зависимости от режима работы привода являются точками опоры для рычага обратной связи. Привод работает следующим образом. Сигналы задания и датчиков положения штоков поступают в электронную систему, вырабатывающую управляющий сигнал, который преобразуется ЭГП в механическое перемещение. Одновременно перемещается и камень рычага рассогласования ручного управления. Рычажная система устроена таким образом, что точкой опоры для рычага ОС будет выбран либо конец штока ЭГП, либо камень РР. Если задание открытия КАУ меньше, чем задание КРУ, то выбирается шток ЭГП и управление ведет КАУ. В противном случае выполняется задание от ручного задатчика. Таким образом, рычаг ОС является селектором для выбора канала управления, требующего минимального расхода воды, поступающей в турбину. Работа устройства характеризуется плавностью перехода от ручного управления к автоматическому - и обратно. Работа такого устройства использует преобразование всех управляющих сигналов в механические перемещения. При этом механическое перемещение, определяемое одним каналом управления, сравнивается с механическим перемещением, определяемым другим каналом управления на входе гидрораспределителя с механической обратной связью от управляемого им сервомотора. Это приводит к относительно низкому быстродействию по каналу автоматического управления КАУ. Однако наличие ручного управления, схема которого реализована без использования электрических сигналов, является серьезным эксплуатационным преимуществом гидромеханической колонки этого типа, позволяющим сохранить управляемость системой даже при отсутствии электропитания, например в результате аварии или при выходе из строя САУ. В настоящее время для управления гидравлическим приводом регулирующих органов гидравлических турбин чаще всего применяются системы, построенные на регулирующих гидрораспределителях и не имеющие механических обратных связей в контуре автоматического управления. Известна одноканальная система электрогидравлического привода регулирующих органов гидравлических турбин без механических связей, использующая электронный канал управления приводом (см. Иванов А.В., Тараканов Д.Л. Создание полномасштабной АСУ ТП Павловской ГЭС. Электрические станции, № 4, 2007 г., стр.26). Гидрокинематическая схема такой системы приведена, например, на сайте ОАО ПромАвтоматика (http://www.pa.ru) в разделе ЭГР ГМЧ. Такое построение системы управления гидроприводом является де факто мировым стандартом: оно используется в регуляторах T.SLC фирмой ALSTOM (http://www.alstom.com), а также в регуляторах VOITH-SIEMENS. Система включает регулирующий пропорциональный гидрораспределитель с одним выходом для реверсивного расхода и двумя входами для пропуска расходов разных направлений. Выход гидрораспределителя подключен посредством трубопровода (маслопровода) к однополостному вспомогательному сервомотору (сервомотору главного золотника). Главный золотник, также посредством трубопроводов (маслопроводов), подключен к главному сервомотору. Перемещение штоков главного золотника и главного сервомотора контролируются датчиками линейного перемещения, сигналы от которых поступают в электронную систему управления. Электронная система управления вырабатывает маломощный управляющий сигнал, поступающий на регулирующий гидрораспределитель, причем электронная система управления учитывает задание, поступающий от верхнего уровня управления. Система работает следующим образом. Маломощный управляющий электрический сигнал поступает на регулирующий гидрораспределитель, в котором указанный сигнал преобразуется в изменяющийся по направлению и пропорциональный ему расход масла, подводимый к полости вспомогательного сервомотора главного золотника. Отклонение главного золотника от среднего положения задает скорость движения главного сервомотора. Электронное управляющее устройство формирует сигнал управления гидрораспределителем на основе получаемой от датчиков линейного перемещения вспомогательного и главного сервомоторов информации о положении главного золотника и главного сервомотора. В отличие от системы управления, описанной выше, в которой электрический сигнал вначале преобразуется в механическое перемещение и только потом в расход рабочей жидкости, при использовании управляющего гидрораспределителя электрический сигнал от электронной системы сразу преобразуется в расход рабочей жидкости. Этим обеспечивается высокая точность отработки сигнала задания и значительное превосходство по быстродействию, примерно в два-три раза, по сравнению с описанной ранее системой, использующей механические обратные связи. Однако отсутствие системы ручного управления, которая бы поддерживала работу гидропривода даже в отсутствии электроснабжения, является существенным эксплуатационным недостатком этого технического решения. Применение систем многоканального управления силовым элементом гидропривода актуально не только для гидравлических турбин, но и для других турбодвигателей. Задачей настоящего изобретения является создание системы управления приводом, обеспечивающей сохранение высокого быстродействия по каналу автоматического управления с автоматическим переходом на другой канал управления без использования электронных и электротехнических компонентов и повышение надежности за счет применения независимых источников управляющих сигналов, изменения состава системы и структуры гидравлических связей между ее элементами. Поставленная задача решается тем, что в систему управления приводом регулирующего органа, включающую первый источник управляющего сигнала, первый регулирующий пропорциональный гидрораспределитель, электрически связанный с указанным первым источником управляющего сигнала, при этом указанный гидрораспределитель имеет один подключенный к полости сервомотора выход реверсивного расхода и два входа для пропуска расходов разных направлений, в соответствии с изобретением дополнительно введены второй источник управляющего сигнала и второй пропорциональный регулирующий гидрораспределитель, управляемый входным сигналом от второго источника сигнала, и невозвратный клапан, при этом выход первого гидрораспределителя подключен к входу для неприоритетного направления расхода второго гидрораспределителя и через невозвратный клапан в направлении пропуска приоритетного расхода к его выходу, соединенному с полостью сервомотора, остальные входы гидрораспределителей подключены к линиям подвода и отвода рабочей жидкости в соответствии с их прямым назначением. Благодаря использованию двух гидрораспределителей, соединенных между собой указанным образом, обеспечивается позиционирование устройства по тому каналу управления, который требует наименьшего смещения в сторону неприоритетного направления расхода, обуславливается резервирование каналов управления и плавный переход с одного канала на другой. Селекция (выбор) каналов происходит без промежуточного преобразования всех управляющих сигналов в механические перемещения, что обеспечивает достижение максимально возможного быстродействия, присущего каждому из каналов. Целесообразно использовать в качестве одного из источников управляющего сигнала механический задатчик. При этом будет реализована возможностью управления системой по двум независимым каналам, один из которых не требует наличия электропитания, что позволяет обеспечить высокую эксплуатационную надежность системы. Изобретение поясняется чертежами, на которых: Фиг.1 показывает функциональную схему соединения - гидрораспределителей, выполненную согласно изобретению, обеспечивающую приоритет вытекающего расхода; Фиг.2 показывает функциональную схему соединения гидрораспределителей, выполненную согласно изобретению, обеспечивающую приоритет втекающего расхода; Фиг.3 показывает вариант воплощения изобретения с использованием ручного управления гидроприводом; Фиг.4 показывает схему включения серийных гидрораспределителей и обратного клапана согласно изобретению, для реализации приоритетного управления по двум полностью развязанным каналам с электрическим управлением. Фиг.5 показывает схему приоритетного управления двухполостным гидроцилиндром или реверсивным гидромотором. Принцип соединения гидрораспределителей в соответствии с изобретением становится понятным из фиг.1 и 2. Как показано на фиг.1 и фиг.2, соединение гидрораспределителей может производиться как для обеспечения приоритета вытекающего расхода, так и приоритета втекающего расхода. Первый регулирующий гидрораспределитель 1 имеет один выход 2 для реверсивного расхода и два входа 3, 4 для расходов разных направлений. Выход 2 подключен к входу 6 для неприоритетного направления расхода второго гидрораспределителя 5 и через невозвратный клапан 7 в направлении пропуска приоритетного расхода к его выходу 8. Если оба гидрораспределителя 1, 5 находятся в среднем положении, то расход на выходе 8 гидрораспределителя 5 будет равен нулю. Смещение плунжера любого из гидрораспределителей 1, 5 вверх при среднем положении другого не приводит к появлению расхода на выходе гидрораспределителя 5, так как для пропуска расхода неприоритетного направления должны быть открыты выходные окна обоих распределителей. При смещении плунжеров обоих гидрораспределителей вверх расход на выходе 8 будет противоположен приоритетному направлению. Если хотя бы один из плунжеров гидрораспределителей смещен вниз, то независимо от положения другого на выходе 8 всегда будет наблюдаться расход приоритетного направления. Так как устройство предназначено для управления скоростью сервомотора, то оно будет обеспечивать позиционирование по тому каналу управления, который требует наименьшего его смещения в сторону неприоритетного направления расхода. Каждая из приведенных на чертежах фиг.1 и фиг.2 схем соединения пропорциональных гидрораспределителей функционально может быть представлена как гидрораспределитель с двумя входами и одним выходом. К выходу этого гидрораспределителя, реализующего функцию селекции управляющих сигналов, может быть по предлагаемой схеме подключен зашунтированный невозвратным клапаном следующий пропорциональный гидрораспределитель. Таким образом, предложенная схема управления гидроприводом позволяет реализовать управление с большим количеством входных сигналов, при селекции их как по минимальному, так и по максимальному значениям. Как показано на фиг.3, предлагаемое устройство может быть использовано для реализации функции ограничительного ручного управления гидроприводом. В состав гидропривода входят: регулирующий гидрораспределитель канала автоматического управления 9. Источником управляющего сигнала для гидрораспределителя 9 является задатчик 10 (входной сигнал - постоянный ток). Источником сигнала для регулирующего гидрораспределителя 11 является механический задатчик 12, воздействующий на шток плунжера гидрораспределителя 11 рычагом 13 обратной связи. Входной сигнал для гидрораспределителя 11 - механическое перемещение средней точки рычага 13 обратной связи. Конец рычага 13 обратной связи механически связан со штоком сервомотора 14; положение штока сервомотора 14 контролируется датчиком 15. Выход первого гидрораспределителя 9 подключен к входу для неприоритетного направления расхода второго гидрораспределителя 11 и через невозвратный клапан 16 в направлении пропуска приоритетного расхода к его выходу, соединенному с полостью сервомотора 14. Остальные входы гидрораспределителей подключены к линиям подвода и отвода рабочей жидкости в соответствии с их прямым назначением. Гидрораспределители и обратный клапан включены по схеме приоритетного вытекающего расхода, аналогично схеме, показанной на фиг.1. Поскольку неприоритетным в приведенной схеме является втекающий расход, что соответствует движению сервомотора 14 на увеличение координаты «Y», то позиционирование выхода будет осуществляться по заданию, которому соответствует наименьшее смещение в сторону неприоритетного изменения расхода. То есть схема обеспечивает реализацию минимального по «Y» задания. Для контроля включения каналов управления служит дифференциальный манометр 17. Если дифманометр 17 показывает, что перепад давлений на гидрораспределителе 11 близок к нулю, то работает канал электрического управления. Если его показания составляют приблизительно 50% от давления рабочего масла высокого давления, то работает канал ограничительного управления. На фиг.4 представлена схема включения гидрораспределителей и обратного клапана для реализации приоритетного управления по двум полностью развязанным каналам с электрическим управлением. В состав гидропривода входят: регулирующий гидрораспределитель 18 первого канала автоматического управления, источник сигнала задатчик 19 (входной сигнал - постоянный ток) и регулирующий гидрораспределитель 20 второго канала автоматического управления. Источник сигнала - задатчик 21 (входной сигнал - постоянный ток). Гидропривод включает также сервомотор 22 и датчики положения штока сервомотора для первого и второго каналов управления, соответственно 23 и 24. В системе установлен также дифференциальный манометр 25 и невозвратный клапан 26. Система работает аналогично описанной выше, за исключением того, что задатчики 19 и 21 вырабатывают электрические управляющие сигналы. Приоритетным здесь является направление расхода, вытекающего из нижней полости сервомотора. Схема реализует управление выбора максимального из задаваемых положений регулирующего органа. На фиг.5 показано, как изменяется конструкция гидрораспределителей при необходимости использовать в качестве выходного двухполостной гидроцилиндр или гидромотор. В этом случае плунжеры гидрораспределителей имеют в два раза большее количество полей, управляющих выходным расходом, а корпуса в два раза больше окон для выходных расходов. Для генерации приоритетного направления расхода плунжер гидрораспределителя 27 нужно смещать вверх, а плунжер гидрораспределителя 28 вниз. Приоритетное движение сервомотора 29 по направлению «Y». Невозвратные клапаны 30 включены в соответствии с пропуском приоритетного направления расхода для верхней и нижней полостей сервомотора. Как уже упоминалось выше, любая из приведенных выше схем соединения гидрораспределителей может быть расширена путем использования дополнительных гидрораспределителей, каждый из которых может управляться независимым управляющим сигналом, как электрическим, так и механическим. Это обеспечивает повышение надежности работы системы и сохранение управляемости даже в случае отсутствия электроснабжения. Предлагаемая конструкция может использоваться как при разработке новых систем управления гидравлическими турбинами, так и реконструкции имеющихся. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Система управления гидравлического привода регулирующего органа, включающая первый источник управляющего сигнала, первый регулирующий пропорциональный гидрораспределитель, электрически связанный с указанным первым источником управляющего сигнала, при этом указанный гидрораспределитель имеет один выход для реверсивного расхода и два входа для расходов разных направлений, отличающаяся тем, что в состав привода дополнительно введены второй источник управляющего сигнала, второй пропорциональный регулирующий гидрораспределитель, управляемый входным сигналом от второго источника сигнала, и невозвратный клапан, при этом выход первого гидрораспределителя подключен к входу для неприоритетного направления расхода второго гидрораспределителя и через невозвратный клапан в направлении пропуска приоритетного расхода к его выходу, соединенному с полостью сервомотора, остальные входы гидрораспределителей подключены к линиям подвода и отвода рабочей жидкости в соответствии с их прямым назначением. 2. Система управления гидравлического привода регулирующего органа по п.1, отличающаяся тем, что второй источник сигнала является механическим задатчиком. 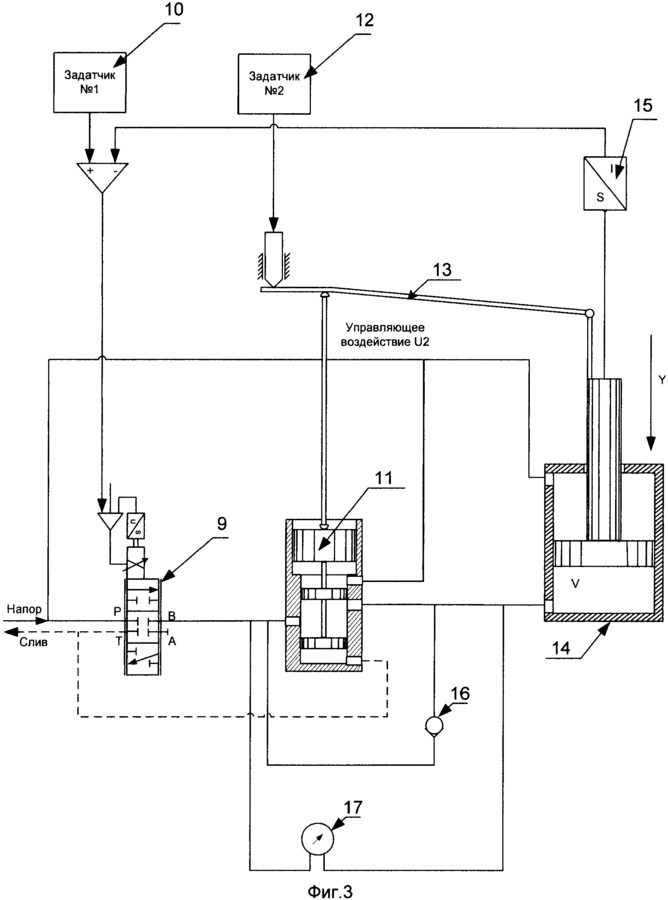 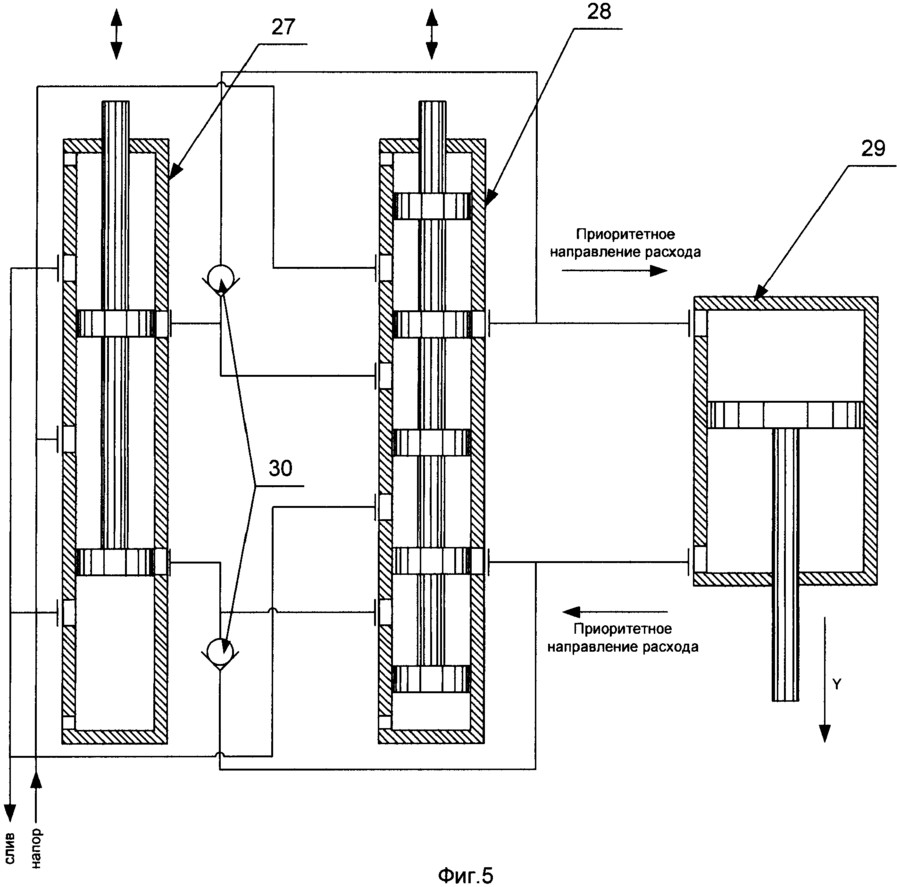 ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД Привод предназначен для управления летательными аппаратами. Привод содержит задающий шаговый электродвигатель, дифференциал, распределительное устройство, силовой исполнительный механизм, датчик нулевого положения шагового электродвигателя, датчик телеметрии и редуктор обратной связи. В результате сокращены габариты и вес привода. При этом обеспечено равное усилие при выдвижении и втягивании штока дифференциального цилиндра, т.е. эффект равнозначного двустороннего действия. При отработке сигнала обратной связи не требуется преобразования видов энергии во внутренней цепи обратной связи. Все это приводит к повышению точности и надежности устройства. 5 з.п. ф-лы, 1 ил. Формула изобретения 1. Электрогидравлический рулевой привод, содержащий задающий шаговый двигатель, на валу которого установлена солнечная шестерня дифференциала, коронная шестерня которого жестко соединена с зубчатым сектором обратной связи, введенным в зацепление с рейкой обратной связи, а сателлиты дифференциала установлены на водиле, на котором закреплена шестерня, введенная в зацепление с зубчатым колесом, скрепленным с поворотным распределительным золотником, основание которого закреплено к корпусу цилиндра, в котором размещены с возможностью перемещения поршень с односторонним штоком и неподвижно закрепленный в корпусе цилиндра со стороны, противоположной штоку поршня, фальшток, размещенный внутри поршня и штока с образованием на его торце полости, подключенной через внутренний канал фальштока к одному из каналов распределителя, другой канал которого подключен к штоковой полости цилиндра, выполненной с эффективной кольцевой площадью, равной эффективной площади торца фальштока, при этом поршневая полость цилиндра соединена со сливом, а рейка обратной связи размещена на его поршне. 2. Электрогидравлический рулевой привод по п.1, отличающийся тем, что закрепленная на водиле шестерня выполнена разрезной из двух частей, связанных между собой моментной пружиной. 3. Электрогидравлический рулевой привод по любому из пп.1, 2, отличающийся тем, что корпус цилиндра, поршень и фальшток снабжены уплотнениями для разделения полости на торце фальштока, штоковой и поршневой полостей цилиндра. 4. Электрогидравлический рулевой привод по любому из пп.1, 2, отличающийся тем, что распределительный золотник выполнен плоским. 5. Электрогидравлический рулевой привод по любому из пп.1, 2, отличающийся тем, что он снабжен датчиком нулевого положения, содержащим токопроводящее кольцо из трех изолированных сегментов, на которых с возможностью перемещения размещены дублированные контакты, закрепленные на токоизолированной пластине зубчатого колеса, введенного в зацепление с солнечной шестерней дифференциала. 6. Электрогидравлический рулевой привод по любому из пп.1, 2, отличающийся тем, что он снабжен датчиком положения штока в виде потенциометра, кинематически связанного со штоком цилиндра. Описание Изобретение относится к области гидроавтоматики, в частности к рулевым электрогидравлическим следящим приводам летательных аппаратов. Известны электрогидравлические приводы, содержащие силовой гидроцилиндр с силовым поршнем, корпус с золотниковым распределителем, электрогидравлический усилитель мощности, клапан включения, гидромеханическое устройство в виде гидравлического цилиндра стопорения (RU №2207300, №2133386). Известен электрогидравлический агрегат, содержащий корпус с каналами, соединенными с гидролиниями нагнетания и слива и полостями силового гидроцилиндра, электрогидравлический усилитель мощности, рулевую машину в виде гидроцилиндра с поршнем, связанным с золотниковым распределителем, электрогидравлический клапан, гидромеханическое устройство в виде механизма стопорения с поршнями и дифференциальной качалкой с шарнирными узлами, связанными с механизмом стопорения и с золотниковым распределителем, клапан включения с распределительным плунжером, к которому подведены гидролинии нагнетания (слива), полостей рулевой машины и др. (RU №2233768). Известен электрогидравлический рулевой привод, содержащий корпус с каналами, соединенными с гидролиниями нагнетания, слива и полостями силового гидроцилиндра с силовым поршнем, электрогидравлический усилитель мощности, рулевую машину в виде гидроцилиндра с поршнем, связанным с золотниковым распределителем с буртами, электрогидравлический клапан, клапан включения в виде подпружиненного распределительною плунжера, к которому подведены гидролинии нагнетания, слива, полостей силового гидроцилиндра и золотникового распределителя, причем в приводе установлены два подпружиненных обратных клапана таким образом, что они обеспечивают прохождение рабочей жидкости в одну из полостей силового гидроцилиндра, причем один из них обеспечивает прохождение рабочей жидкости в нее из гидролинии слива. В данном рулевом приводе в одном крайнем положении распределительного плунжера клапана включения обеспечивается прохождение рабочей жидкости из гидролинии нагнетания через один из обратных клапанов в полость силового гидроцилиндра, при этом оба обратных клапана препятствуют прохождению рабочей жидкости из указанной полости, одновременно посредством расточки в корпусе, в которой установлена пружина распределительного плунжера, обеспечивается соединение гидролинии слива с другой полостью силового гидроцилиндра, а в другом крайнем положении распределительного плунжера обеспечивается отсоединение полостей силового гидроцилиндра от гидролинии нагнетания и слива соответственно (RU №2288133, прототип). Недостатком известных электрогидравлических рулевых приводов является конструктивная сложность, большие габариты и вес. Кроме того, в них не представляется возможным обеспечить равное усилие при выдвижении и втягивании штока дифференциального цилиндра, т.е. эффект равнозначного двустороннего действия. Выполнение цилиндра с двусторонним штоком позволяет создать равные усилия при перемещении поршня в обоих направлениях, но габариты цилиндра при этом увеличиваются на величину хода. При отработке сигнала обратной связи необходимо неоднократное преобразование видов энергии в цепи обратной связи через задающее устройство. Все это приводит к снижению точности и надежности устройства. Технической задачей заявляемого изобретения является создание эффективного электрогидравлического рулевого привода двустороннего действия и расширение арсенала электрогидравлических рулевых приводов. Технический результат, обеспечивающий решение поставленной задачи, заключается в упрощении конструкции, уменьшении габаритов и веса с одновременным обеспечением равного усилия при выдвижении и втягивании штока дифференциального цилиндра, а отработка сигнала обратной связи для возврата золотника в нейтральное положение осуществляется непосредственно тем же редуктором, который осуществляет задающее перемещение золотника, т.е. без задействования для этого электрических цепей - во внутренней цепи обратной связи, механическими средствами с высокой точностью и надежностью. Сущность изобретения состоит в том, что электрогидравлический рулевой привод содержит задающий шаговый двигатель, на валу которого установлена солнечная шестерня дифференциала, коронная шестерня которого жестко соединена с зубчатым сектором обратной связи, введенным в зацепление с рейкой обратной связи, а сателлиты дифференциала установлены на водиле, на котором закреплена шестерня, введенная в зацепление с зубчатым колесом, скрепленным с поворотным распределительным золотником, основание которого закреплено к корпусу цилиндра, в котором размещены с возможностью перемещения поршень с односторонним штоком и неподвижно закрепленный в корпусе цилиндра со стороны, противоположной штоку поршня, фальшток, размещенный внутри поршня и штока с образованием на его торце полости, подключенной через внутренний канал фальштока к одному из каналов распределителя, другой канал которого подключен к штоковой полости цилиндра, выполненной с эффективной кольцевой площадью, равной эффективной площади торца фальштока, при этом поршневая полость цилиндра соединена со сливом, а рейка обратной связи размещена на его поршне. Предпочтительно, закрепленная на водиле шестерня выполнена разрезной из двух частей, связанных между собой моментной пружиной, корпус цилиндра, поршень и фальшток снабжены уплотнениями для разделения полости на торце фальштока, штоковой и поршневой полостей цилиндра, распределительный золотник выполнен плоским. Кроме того, электрогидравлический рулевой привод снабжен датчиком нулевого положения, содержащим токопроводящее кольцо из трех изолированных сегментов, на которых с возможностью перемещения размещены дублированные контакты, закрепленные на токоизолированной пластине зубчатого колеса, введенного в зацепление с солнечной шестерней дифференциала, а также снабжена датчиком положения штока в виде потенциометра, кинематически связанного со штоком цилиндра. На чертеже изображена принципиальная гидромеханическая схема электрогидравлического рулевого привода. Электрогидравлический рулевой привод содержит задающий шаговый электродвигатель 1, на валу которого установлена солнечная шестерня 2 редуктора-дифференциала, коронная шестерня 4 которого жестко соединена с зубчатым сектором 5 обратной связи, введенным в зацепление с рейкой 6 обратной связи, а три сателлита 3 дифференциала установлены на водиле 7, на котором закреплена шестерня 8, введенная в зацепление с зубчатым колесом или сектором 22, жестко соединенным или выполненным заодно с плоским поворотным распределительным золотником 9, основание 10 которого закреплено к корпусу цилиндра 12, в котором размещены с возможностью перемещения поршень 13 с односторонним штоком, а также неподвижно закрепленный в корпусе (к глухой торцевой крышке) цилиндра 12 со стороны, противоположной штоку поршня 13, фальшток 14. Фальшток 14 размещен внутри (в осевой расточке) поршня 13 и штока с образованием на его торце полости 23, подключенной через внутренний канал 24 фальштока 14 к одному из рабочих каналов (не обозначены) распределителя 9, другой рабочий канал которого подключен к штоковой полости 25 цилиндра 12, выполненной с эффективной кольцевой площадью, равной эффективной площади торца фальштока 14. При этом поршневая полость 26 цилиндра 12 соединена со сливом, а рейка 6 обратной связи размещена на его поршне 13. Закрепленная на водиле 7 шестерня 8 выполнена разрезной из двух частей, связанных между собой моментной пружиной (не изображена). Корпус цилиндра 12, поршень 13 и фальшток 14 снабжены уплотнениями (не обозначены) для разделения (герметизации) полости 23 на торце фальштока 14, штоковой, также поршневой полостей 25, 26 цилиндра 12. Корпус цилиндра 12 шарнирно установлен на опоре 27. Электрогидравлический рулевой привод снабжен датчиком нулевого положения, содержащим токопроводящее кольцо из трех изолированных сегментов 15, на которых с возможностью перемещения размещены дублированные контакты 16, закрепленные на токоизолированной пластине зубчатого колеса 17, введенного в зацепление с шестерней 18, установленной на валу шагового электродвигателя 1. Электрогидравлический рулевой привод снабжен информационным датчиком 19 положения штока в виде потенциометра П-82 ГОСТ 9245-79, кинематически связанного со штоком поршня 13 цилиндра 12. Электродвигатель подключен к системе управления вилкой 28. В гидролинии подвода рабочей среды установлен фильтр 29. Электрогидравлический рулевой привод работает следующим образом. Информация от внешней системы управления в виде определенной последовательности управляющих импульсов подается через вилку 28 на вход шагового электродвигателя 1 и преобразуется им в угловое перемещение выходного вала шагового электродвигателя 1. Вал шагового электродвигателя 1 приводит во вращение зубчатое колесо 2, являющееся солнечной шестерней дифференциала. Дифференциал выполняет функцию сравнивающего устройства и осуществляет суммирование угловых перемещений выходного вала шагового электродвигателя 1 с угловым перемещением реечной передачи (редуктора обратной связи) - рейки 6 и сектора 5. Коронная шестерня 4 дифференциала установлена в подшипниках и жестко связана с зубчатым сектором 5 обратной связи, взаимодействующим с рейкой 6 при отработке обратной связи. Три зубчатых колеса 3 (сателлиты) укреплены на валу 7, являющемся водилом дифференциала. Водило 7 является выходным звеном сравнивающего устройства - дифференциала, на котором укреплена разрезная шестерня 8, взаимодействующая с зубчатым колесом 22 плоского поворотного золотника 9 распределительного устройства. Разрезная шестерня 8 состоит из двух частей, которые связаны между собой моментной пружиной (не изображена). Сжимаясь, пружина поворачивает отдельные части шестерни 8 в разные стороны, вращая их вокруг оси, и тем самым выбирая зазор в зубчатом зацеплении. Распределительное устройство осуществляет распределение рабочей жидкости в полостях 23 и 25 гидравлического цилиндра 12. Конструктивно распределительное устройство представляет собой плоский золотник 9, расположенный между основанием 10 и крышкой 11. Основание 10 прикреплено к корпусу (гильзе) цилиндра 12. Золотник 9 установлен на оси (не изображена) и может свободно поворачиваться вокруг нее. Золотник 9 имеет отверстия для подвода и слива, а также два отверстия (рабочие каналы) для распределения рабочей жидкости по полостям 23 и 25 гидравлического цилиндра 12. В основании 10 и крышке 11 выполнены два отверстия с втулками (не изображены), образующие рабочие кромки распределительного устройства. Силовой исполнительный механизм представляет собой гидравлический цилиндр 12, в котором установлен поршень 13 и закреплен фальшток 14. Полости 23 и 25 цилиндра 12 соединены с распределительным устройством. Для герметизации полостей 23 и 25, 26 служат манжеты и кольца. На поршне 13 выполнена рейка 6, которая вместе с зубчатым сектором 5 сравнивающего устройства образует реечную передачу, выполняющую функцию механизма обратной связи, и преобразует поступательное движение поршня 13 со штоком во вращательное движение зубчатого колеса (коронной шестерни) 4. Для контроля нулевого положения шагового электродвигателя 1 и обеспечения регламентных проверок изделия без подачи гидравлического питания (давления) служит датчик нулевого положения (ламельного типа). Датчик представляет собой неподвижное токопроводящее кольцо, состоящее из трех изолированных сегментов 15, по которым перемещаются дублированные контакты 16, укрепленные на токоизолированной пластине (не обозначена) зубчатого колеса 17. Зубчатое колесо 17 входит в зацепление и приводится во вращение зубчатым колесом 18, которое укреплено на валу шагового электродвигателя 1. Датчиком 19 телеметрии осуществляется определение и передача во внешнюю систему управления информации о положении штока цилиндра 12. Напряжение питания U=(б+0,2)В подается на штыри разъема 21. Вал потенциометра 19 соединен через зубчатый сектор 20 с зубчатым колесом 4 дифференциала. При перемещении поршня 13 со штоком гидравлического цилиндра 12 движок потенциометра 19 поворачивается на угол, пропорциональный перемещению штока, изменяя выходное напряжение, снимаемое с потенциометра 19. Последовательность управляющих импульсов, поступающая на вход шагового электродвигателя 1, преобразуется им в угловое перемещение выходного вала шагового электродвигателя 1. С этого вала при заторможенном зубчатом колесе 4 (коронная шестерня 4 заторможена через рейку 6 поршнем 13) с помощью зубчатого колеса 2 и трех зубчатых колес (сателлитов) 3 вращение передается валу 7 дифференциала с укрепленным на нем зубчатым колесом (разрезной шестерней) 8, которое посредством своего зубчатого венца поворачивает золотник 9 распределительного устройства, открывая проходные сечения рабочих каналов золотника 9. Рабочая жидкость по каналам в корпусе цилиндра 12 подается в одну из полостей (23 - на выдвижение или 25 - на втягивание штока) гидравлического цилиндра 12 и перемешает поршень 13 со штоком. Благодаря равенству эффективных площадей штоковой полости 25 и площади торца фальштока 14 в полости 23, при подаче давления в любую из полостей 23, 25 усилие на штоке поршня 13 имеет одинаковую величину, при минимальных габаритах цилиндра 12 (т.е. без выполнения штока двусторонним). В результате отработка команд на перемещение в обоих направлениях (на выдвижение и втягивание штока) осуществляется с одинаковым усилием, без рывков, сбоев, заклинивания, с минимальной временной задержкой. При этом обеспечена установка цилиндра 12 на опоре 27, расположенной вдоль оси цилиндра 12, тем самым улучшены компоновочные возможности. Перемещаясь, поршень 13 приводит в движение рейку 6, которая поворачивает через сектор 5 шестерню 4 дифференциала и передает вращение зубчатым колесам (сателлитам) 3 и связанному с ними валу (водилу) 7 дифференциала. При движении поршня 13 со штоком поворачивается зубчатое колесо (разрезная шестерня) 8 и возвращает золотник 9 распределительного устройства в нулевое положение, закрывая проходные сечения рабочих каналов. Подача рабочей жидкости в полости 23 и 25 гидравлического цилиндра 12 прекращается, поршень 13 со штоком останавливаются. Таким образом, вал 7 дифференциала осуществляет суммирование 2-х сигналов - поворота вала шагового электродвигателя 1 и поворота коронной шестерни 4, а золотник 9 отрабатывает рассогласование этих 2-х поворотов - сравнение и отработка сигнала обратной связи для возврата золотника 9 в нейтральное положение осуществляется непосредственно тем же редуктором, который осуществляет задающее перемещение золотника 9, без задействования для этого электрических цепей, т.е. рассогласование по положению золотника 9 выбирается во внутренней цепи обратной связи, механическими средствами с высокой точностью и надежностью. В результате настоящего изобретения упрощена конструкция, сокращены габариты и вес электрогидравлического рулевого привода. При этом обеспечено равное усилие при выдвижении и втягивании штока дифференциального цилиндра 12, т.е. эффект симметричного двустороннего действия, улучшены компоновочные возможности. Для отработки золотником 9 сигнала обратной связи не требуется преобразования видов энергии (из механической в электрическую и обратно) во внутренней цепи обратной связи. Все это приводит к повышению точности и надежности устройства  Заключение Проведя патентный обзор, становится понятно, что исследования в данной области проводятся довольно регулярно. Выше была представлена малая часть патентов по системам управления электрогидравлическим приводом. Патентный обзор помог понять, что разработка в данном направлении требует полной индивидуальности и отстранении от существующих систем управления. |