|
|
Урока Основы робототехники
Государственное бюджетное общеобразовательное учреждение
Самарской области средняя общеобразовательная школа
«Образовательный центр» п.г.т. Рощинский
муниципального района Волжский Самарской области
ТЕХНОЛОГИЧЕСКАЯ КАРТА УРОКА
«Основы робототехники»
6 класс
Учитель Лиепа Елена Николаевна
Раздел
|
Основы управления роботом
|
Тема урока
|
Датчик освещённости. Решение простейших задач: Движение по линии.
|
Цель урока
|
Изучить движение робота по линии с использованием двух датчиков освещённости.
|
Планируемый результат
|
Предметные умения
|
УУД
|
Личностные
|
Регулятивные
|
Коммуникативные
|
Познавательные
|
Умение программировать датчики освещённости при помощи вложенного ветвления.
Понимать причины «срывов» робота с линии и уметь отлаживать программу.
Вывод по проблеме урока: Робот двигается по линии в разных направлениях без «срывов».
|
Умение подключать датчики освещённости к определённым портам. Умение по датчику освещённости определять белый и чёрный цвет. Умение определять и задавать пороговое значение для каждого из датчиков.
Умение программировать движение робота датчики по двум датчикам освещённости при помощи вложенного ветвление.
Умение анализировать действия робота на основе составленной программы. Умение отлаживать программу для достижения поставленной цели.
Умение аргументировать собственную точку зрения.
|
Самооценка на основе критерия успешности.
Адекватное понимание причин успеха / неуспеха при решении поставленной задачи.
Умение аргументировано оценивать свои и чужие достижения.
|
Следовать режиму организации внеурочной деятельности. Определять степень успешности своей деятельности и деятельности других в соответствии с критериями.
Самостоятельно адекватно оценивать правильность результатов действия, внесение необходимых корректив
|
Планирование учебного сотрудничества.
Умение формулировать и аргументировать своё мнение и позицию в коммуникации.
Достижение договоренностей и согласование общего решения.
Умение разрешать конфликт на основе учета интересов всех участников.
|
Выделение и формулирование проблемы.
Поиск и выделение необходимой для решения поставленной задачи информации.
Выбор наиболее эффективных способов решения задач.
Выдвижение гипотез и их обоснование.
Самостоятельное создание алгоритмов деятельности.
Моделирование и преобразование моделей роботов.
Рефлексия способов и условий действия на основе эксперимента.
Установление причинно-следственных связей, доказательство;
Самостоятельное создание способов решения проблем творческого характера.
Построение логической цепи рассуждений.
Использование знаково-символических средств программирования.
|
Основные понятия
|
Датчик освещённости, пороговое значение, графические блоки программы Lego NXT 2.0 Programming. Логическая структура ветвления.
|
Ресурсы
(оборудование)
|
Компьютер с установленным программным обеспечением ПервоРобот NXT 2.1 (LEGO MINDSTORMS NXT EDUCATION);
мультимедийный проектор;
доска;
Конструктор «ПервоРобот NXT» (Lego Mindstorms NXT - 9797);
Поля для соревнования роботов NXT;
Дополнительные датчики освещённости для микрокомпьютера.
Электронный образовательный ресурс. ПервоРобот NXT 2.0. Введение в Робототехнику.ПК, презентация, раздаточный материал
|
Тип урока
|
Урок формирования предметных умений.
|
Организация пространства
|
Фронтальная, индивидуальная, групповая
|
Ход занятия.
Этапы урока
|
Задачи этапа
|
Деятельность учителя
|
Деятельность учащихся
|
Формируемые УУД
|
I.Этап урока:
создание проблемной ситуации и формулирование проблемы.
|
Понимать принцип движения робота по направляющей линии.
Сформулировать задачу для робота.
|
Показ видеоролика.
– На прошлом занятии мы программировали робота на движение его по линии. Сегодня мы рассмотрим более сложную траекторию движения. Давайте загрузим ваши программы в микропроцессор робота и попробуем пройти данную траекторию.
(Робот срывается с линии, едет не по заданному маршруту)
– Скажите, а в чём, по вашему мнению, здесь может быть проблема?
Здесь важно спровоцировать ребят на приведение разных мнений. Если ребята догадываются, что необходимо подключить второй датчик освещённости, по переходим к этапу моделирования робота, в противном случае, задаем наводящие вопросы: Робот движется по центру линии или придерживается края? Что показывает на пороговое значение датчика освещённости?
– Да, действительно, чтобы робот двигался более чётко по линии необходимо «держаться» за оба края линии. Скажите, что мы сегодня должны сделать, чтобы добиться желаемого результата?
Наводящими вопросами учитель подводит к главному вопросу:
Подключить второй датчик освещённости и запрограммировать микропроцессор на движение робота по линии с использованием двух датчиков.
|
Высказывают свои версии.
Выслушиваются все варианты, просим аргументировать, затем мотивировано выбираем вариант подключения второго датчика освещённости.
Формулирование проблемы
|
Личностные УУД:
Адекватное понимание причин успеха / неуспеха при решении поставленной задачи.
Регулятивные УУД:
Следовать режиму организации внеурочной деятельности.
Коммуникативные УУД:
Планирование учебного сотрудничества.
Умение формулировать и аргументировать своё мнение и позицию в коммуникации.
Достижение договоренностей и согласование общего решения.
Умение разрешать конфликт на основе учета интересов всех участников.
Познавательные УУД:
Выделение и формулирование проблемы.
Поиск и выделение необходимой для решения поставленной задачи информации.
Выбор наиболее эффективных способов решения задач.
Выдвижение гипотез и их обоснование.
Моделирование и преобразование моделей роботов.
Построение логической цепи рассуждений.
|
II.Этап урока: выдвижение гипотез, актуализация знаний,
планирование собственной деятельности.
|
Научиться выдвигать гипотезы на основе имеющихся знаний и исходя из проведённого опыта, а также и обосновывать собственные гипотезы.
Смоделировать самостоятельно робота для выполнения поставленной задачи.
|
– Итак, что же мы должны сделать в первую очередь?
Скажите, а как должны располагаться датчики относительно друг друга? На каком расстоянии друг от друга? Почему?
|
Предлагают свои гипотезы (подключение второго датчика).
Предлагают свои гипотезы и аргументируют их. (Подключение второго датчика).
Моделирование робота самостоятельно.
|
Выбор наиболее эффективных способов решения задач.
Выдвижение гипотез и их обоснование.
Самостоятельное создание алгоритмов деятельности.
Моделирование и преобразование моделей роботов.
Рефлексия способов и условий действия на основе эксперимента.
Установление причинно-следственных связей, доказательство.
Самостоятельное создание способов решения проблем творческого характера.
Построение логической цепи рассуждений.
Использование знаково-символических средств программирования
|
(После того, как ребята подключили второй датчик освещённости к микропроцессору)
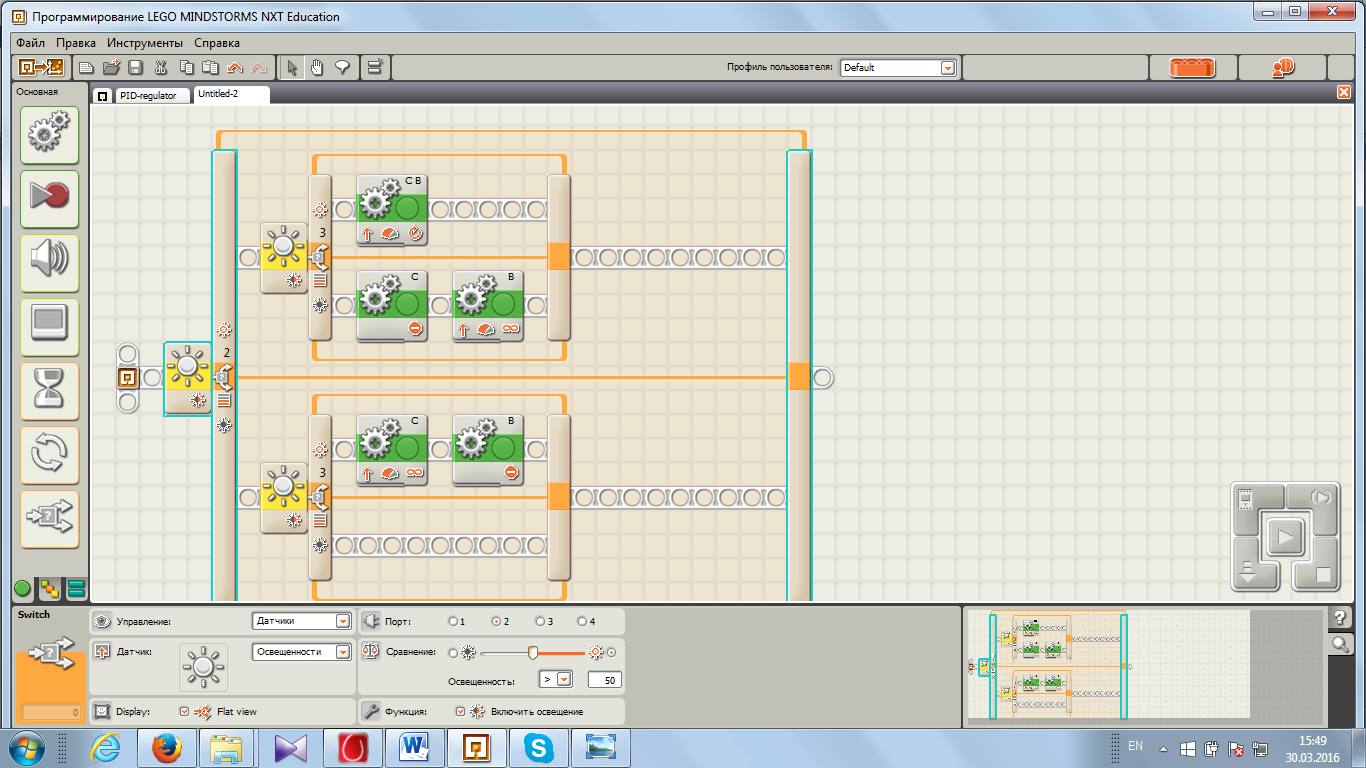
– Давайте вспомним, при помощи какого блока алгоритма мы подключали датчик освещённости?
– Теперь у нас два датчика освещённости. Для второго датчика освещённости какой мы будем использовать блок программы?
– Подумайте, как вставить новый блок ветвления в нашу программу? Давайте рассмотрим на роботах возможные варианты показаний датчиков и действие робота при различных вариантах.
(Необходимо подвести ребят к выводу, что программирование датчиков должно проходить последовательно)
|
Ветвление
Ветвление
Предлагают свои гипотезы и аргументируют их.
Рассматривают все возможные варианты, продумывают действия робота при различных вариантах.
|
III.Этап урока:
открытие нового знания и формулирование вывода.
|
Научиться выдвигать гипотезы на основе имеющихся знаний и исходя из проведённого опыта, а также и обосновывать собственные гипотезы.
Запрограммировать самостоятельно робота для выполнения поставленной задачи.
Провести эксперимент.
Научиться понимать причины успеха / неуспеха при решении поставленной задачи.
Научиться занимать свою позицию и строить отношения с людьми – договариваться с людьми, предотвращая или преодолевая конфликты. Определять и объяснять своё отношение к нравственным ценностям.
|
Знакомит учащихся со схемой подключения датчиков. (Заранее подготовлена на доске)
|
Ребята самостоятельно программируют роботов.
|
Рефлексия способов и условий действия на основе эксперимента.
Установление причинно-следственных связей, доказательство;
Самостоятельное создание способов решения проблем творческого характера.
Построение логической цепи рассуждений.
Использование знаково-символических средств программирования
Самостоятельно адекватно оценивать правильность результатов действия, внесение необходимых корректив
|
‑ У кого получилось, проводим испытание роботов на поле. При необходимости, вносим коррективы в программу.
‑ При работе на поле не мешайте друг другу, будьте взаимно вежливы.
|
Проводят испытание роботов на поле, корректируют программы (отладка программы).
|
Самостоятельно адекватно оценивать правильность результатов действия, внесение необходимых корректив.
Следовать режиму организации внеурочной деятельности.
Планирование учебного сотрудничества.
|
IV.Этап урока: подведение итогов.
|
Научиться понимать причины успеха / неуспеха при решении поставленной задачи.
Определять и объяснять своё отношение к нравственным ценностям.
|
‑ Как обычно, в конце занятии проведём соревнование роботов по международным правилам соревнований. Но, к сожалению, мы ограничены во времени, поэтому у вас будет только одна попытка. Пусть победит сильнейший!
|
Участвуют в соревновании «Движение по линии»
|
Самооценка на основе критерия успешности.
Адекватное понимание причин успеха / неуспеха при решении поставленной задачи.
Умение аргументировано оценивать свои и чужие достижения.
|
|
– Ребята, мы добились поставленной цели?
‑Скажите, а мы можем заставить робота при движении по линии остановиться в заранее заданной точке?
‑ Но это уже будет темой нашего следующего занятия!
Всего доброго! Спасибо за работу.
|
– Да, роботы движутся по сложной линии без срывов.
Выдвигают гипотезы
|
Умение сравнивать.
Формулирование вывода.
| |
|
|
 Скачать 315.7 Kb.
Скачать 315.7 Kb.