Устройство ЭВМ. Устройство ЭВМ для управления электроприводами. Устройство эвм для управления электроприводами Функциональные схемы электроприводов с микропроцессорным управлением
 Скачать 0.78 Mb. Скачать 0.78 Mb.
|

|
3.3.6. УЧПУ на основе микроЭВМ Применение микропроцессорной техники в УЧПУ позволило резко сократить число модификаций устройств, уменьшить время их проектирования и затраты на эксплуатацию. Семейство УЧПУ, созданных на базе микроЭВМ «Электроника 60», состоит из нескольких модификаций: 2С42, 2Р22, 2Р32, 2С85, 2М43 и др. Конструктивно УЧПУ этого класса выполняются в виде автономной стойки (рис. 3.35) и в блочно-модульном исполнении с выносным дисплейным блоком (рис. 3.36). 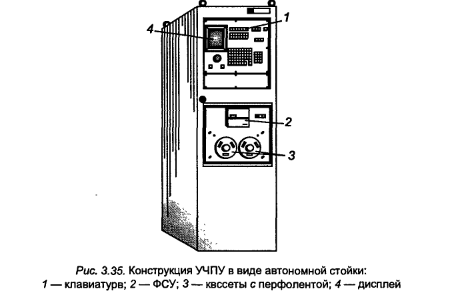 Модификации устройств различаются составом программного и математического обеспечения, учитывающим особенности технологического процесса на станках различных групп, и количеством управляемых координат. УЧПУ 2С85-62 предусматривает применение следящего, а 2С85-63 — шагового электропривода. УЧПУ «Электроника НЦ-ЗЬ и «Электроника НЦ80-31», выполненные на основе микропроцессорной системы, имеют модульную структуру и позволяют увеличивать число управляемых координат наращиванием модулей.  УЧПУ «Электроника НЦ-З1, функциональный состав которого изображен на рис. 3.37, служит для управления станками токарной группы со следящими приводами подач и импульсными датчиками обратной связи. Технологическое программное обеспечение хранится в маскируемом ПЗУ на этапе изготовления. УЧПУ обеспечивает линейную и линейно-круговую интерполяцию. Ввод программы выполняется с клавиатуры пульта оператора и записью на кассету электронной памяти. В составе УЧПУ имеются следующие основные устройства: процессоры Пр 1 и Пр2, ОЗУ внешней памяти и АМТ образуют вычислительную часть. Блоки КЭ, КИП, КП предназначены для связи со станком. Кроме того, в составе УЧПУ имеются блок питания стабилизированный и блок кассеты внешней памяти. Взаимодействие функциональных блоков обеспечивается магистралью МНЦ («Общая шина»). Обмен информацией осуществляется 16-разрядными словами. Такую же разрядность имеет адрес хранения слова. Объем адресного пространства, в котором происходит обмен по МНЦ, составляет 64К слов. Управление процессами обмена с модулями КЭ, КИП, КП и ПО осуществляется модулем АМТ (адаптер магистрали — таймер), который использует радиальный принцип управления. АМТ реализует преобразование магистрали МНЦ в дополнительный канал и обработку временных интервалов, заданных программно на МНЦ. В состав АМТ входят: узел интерфейса, адаптер магистрали, программируемый таймер и схема управления. Адаптер магистрали обеспечивает радиальное управление модулями КЭ, КИП, КП и ПО, в составе которых имеются регистры. Каждый из этих регистров имеет фиксированный физический адрес в адресном пространстве МНЦ и программно доступен либо по чтению, либо по записи, либо по чтению и записи. Модуль ОЗУ ВП предназначен для ввода-вывода и хранения программы обработки деталей и поставляется как отдельное изделие. В состав ОЗУ ВП входит кассета внешней памяти (КВП), представляющая собой накопитель информации с автономным источником питания (время хранения информации 100 ч). Для приема информации от узла электроавтоматики станка и выдачи управляющих сигналов к нему служит модуль контроллера электроавтоматики (КЭ), который подключается к каналу связи с процессором через АМТ. Для передачи информации в узел электроавтоматики станка и обратно в КЭ предусмотрены 16- разрядные регистры (входной и выходной). Потенциальную развязку осуществляют оптронные элементы АОТ-110. Модуль контроллера измерительных преобразователей (КИП) предназначен для приема информации от измерительных преобразователей (ИП), хранения ее и считывания в процессор. КИП подключается к процессору через модуль АМТ и обслуживает 4 ИП: по осям Хи Z, маховичка и шпинделя станка. Тип ИП — фотоэлектрические импульсные преобразователи, имеющие три выходных сигнала: основной (прямой и инверсный) дополнительный (сдвинут на 90°, прямой и инверсный) и нуль-метку. Сигналы имеют форму прямоугольных импульсов (U «0* = 0 В; U «1* = 15 В ± 10%). КИП осуществляет преобразование унитарного кода в двоичный 16-разрядный код посредством двоичных счетчиков, которые доступны процессорам Пр 1 и Пр2 по чтению. По окончании чтения счетчики обнуляются. Таким образом определяются относительные линейные перемещения рабочих органов станка по осям X и Z, частота вращения шпинделя и относительное линейное перемещение резца (по оси X или Z), задаваемое оператором вручную вращением маховичка. |