Устройство ЭВМ. Устройство ЭВМ для управления электроприводами. Устройство эвм для управления электроприводами Функциональные схемы электроприводов с микропроцессорным управлением
 Скачать 0.78 Mb. Скачать 0.78 Mb.
|

|
3.2.5. Язык релейно-контактных символов Рассмотрим примеры использования языка РКС для программирования контроллеров. Основной единицей языка является команда-оператор (инструкция) Команды делятся на группы. логическая группа, группа функциональных команд, группа арифметических команд, группа функциональных тестовых команд Формат редейно-контактной команды состоит из се символа и номера Форматы других команд включают перечень параметров, определяемых для каждой команды. Переменные в языке РКС относятся к одному из двух типов: булевы и число вые (целые арифметические). И первые, и вторые могут быть входными, если они соответствуют выходным сигналам, т.е. решениям о включении или выключении тех или иных исполнительных органов. В некоторых случаях имеегся необходимость в промежуточных переменных, получаемых на определенных стадиях вычислительною процесса. Обобщение особенностей отдельных моделей ПК позволило составить табл 3.1. где представлены лишь логические и функциональные инструкции. Остальные группы инструкций отличаются большим разнообразием и рассматриваются для отдельных моделей ПК Команда является самостоятельной наименьшей единицей рабочей программы пользователя (РПЛ) и представляет собой указание для процессора. Любая команда состоит из двух частей-кода операции (КОП) и адресной части. Некоторые команды имеют несколько модификаций (в зависимости от признака). В табл 3 [ представлен набор команд контроллера KAL. Для хранения команд память контроллера КА1 распределяется в соот ветствии с инструкцией ПК Значении входных величин заносятся в таблицу состояний (ТС) входов. Для занесения состояния одного ввода используется одно слово ТС. Например, для записи состояния входов блока с номером 00(8). содержащего модуль с номером 0(8), используется слово в ТС с адресом 000(8), а для за писи состояния входов блока 17(8), содержащего модуль 7(8). —-слово в ТС с адресом 177(8)1. 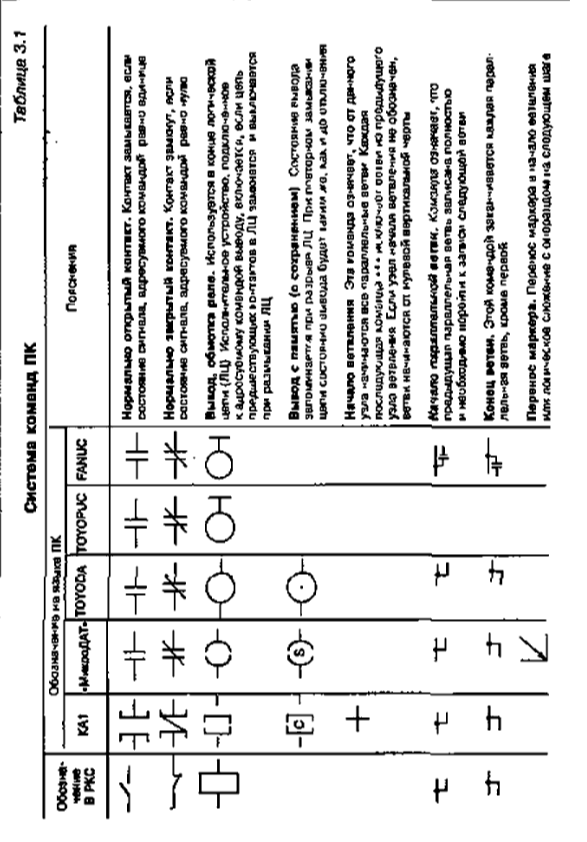 В контроллере КА1 для адресной информации используется восьмеричная система счисления. Слово ТС 16-разрядное. Старите разряды используются для внутренних функций контроллера Младшие восемь разрядов характеризуют состояние соответствующего входа данного модуля Например* в блоке 15(8), содержащем модуль 2(8), замкнуты 1-й и 6-й входы Следовательно, в 1-м и 6 м разрядах слова ТС 152(8) будут записаны единицы Разряд 15 .. 7 6 5 4 3 2 1 О Слою памяти 0 1 0 0 0 0 10 Таблица состояний входов занимает с 0(8)-го по 177(8)-е слово памяти. Аналогично строится ТС выходов, которая занимает с 200(8>-й по 377<й)-ю ячейки памяти. 3.2.6. Составление рабочей программы пользователя Исходной информацией для составления РПП является РКС управления объектом. В качестве примера рассмотрим схему, приведенную на рис 3 18 Каждому входному контакту и каждому выходному реле присваивается адрес в соответствии со схемой подключения к модулям и блокам контроллера. Выберем блок 15(8) ввода вывода, модуль ввода Вв1, модуль вывода Выв2. Входные и выходные сигналы подключим согласно 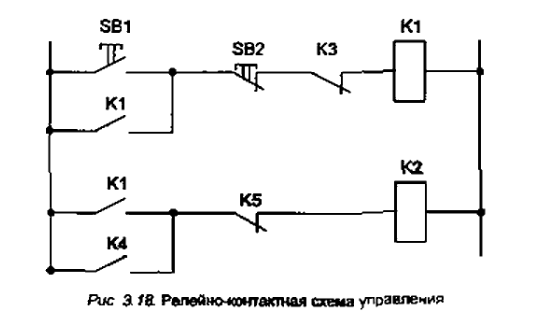 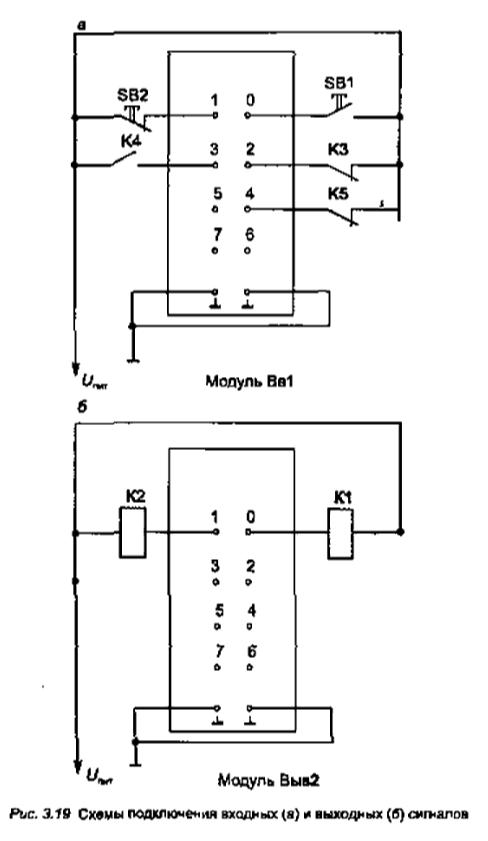 рис. 3.19. Следовательно, элементы схемы будут иметь следующие адреса: Входные Выходные 5В1 1510 К1 1520 5В2 1511 К2 1521 КЗ 1512 К4 1513 К5 1514 Релейно-контактная схема, составленная в символах ПК КА1, для рассмотренного примера приведена на рис. 3.20. Перед началом адреса ставится цифра 0, если контакт подключается к модулю ввода. Если же перед адресом стоит цифра 1 (но она может быть и опущена), это означает, что данный контакт принадлежит элементу, подключенному к модулю вывода. Любой элемент, кроме вывода, может употребляться в схеме неограниченное число раз. 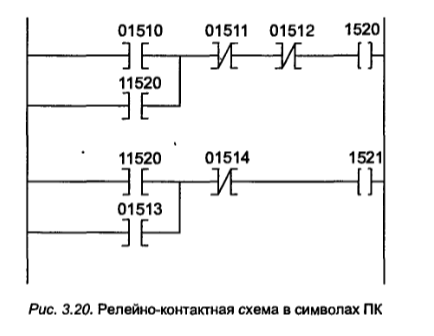 Для занесения программы в память контроллера используется пульт программирования, вид которого зависит от типа ПК. 3.2.7. Программируемый контроллер КА1 Программируемый контроллер КА! предназначен для управления различным технологическим оборудованием (автоматическими линиями, роботизированными комплексами, автоматами и т.д.). Эксплуатация контроллера должна осуществляться в закрытом (цеховом) помещении с соответствующими инструкции климатическими условиями. Ниже приводятся технические характеристики контроллера КА1:   1024 1024 15 360 64/64 999,9 9999 Сложение, вычитание, умножение, деление, сравнение Символы релейных схем, арифметические операции Однофазная сеть переменного тока Максимальное число входов-выходов Максимальное число промежуточных реле Максимальный объем памяти программы, слов Максимальное число счетчиков/тайме- ров Максимальный интервал времени, отрабатываемый одним таймером, с (дискретность 0,1 с) Максимальное число импульсов, отсчитываемых одним счетчиком Арифметические операции Язык программирования Питание устройства  220 +10% (-15%) 50±1 1000 Не более 2 Напряжение, В Частота, Гц Наработки на отказ, ч Среднее время восстановления, ч  0,075 0,05 0,05 Потребляемая мощность, кВ А, не более: блока управления одного блока ввода-вывода пульта программирования Таблица 3.2 Параметры входных сигналов
Параметры входных сигналов приведены в табл. 3.2, а выходных — в табл. 3.3. Таблица 3.3 Параметры выходных сигналов
Конструктивно программируемый контроллер КА1 выполнен в виде блоков, встраиваемых в унифицированный шкаф, а пульт программирования и диагностики — в виде переносного пульта. В шкаф может быть установлено четыре блока ввода-вывода (БВВ) и общий источник питания для них. В один из шкафов устанавливается также блок управления (БУ). В каждом БВВ расположены стабилизатор напряжения, восемь модулей ввода-вывода и модуль адаптера 2 (МА2). К одному БУ можно подключить 16 блоков ввода-вывода. В БУ расположены модуль процессора, модуль оперативного запоминающего устройства (МОЗУ), модуль пульта управления (МПУ), модуль адаптера 1 (МА1), блок питания. При необходимости в БУ устраняется второй модуль МОЗУ. 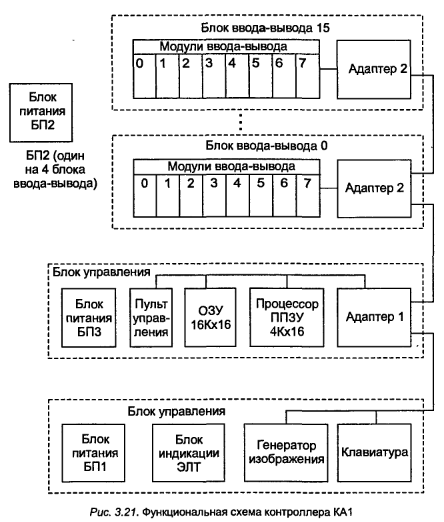 Пульт программирования и диагностики выполнен в виде переносного настольного устройства. В своем составе он имеет сенсорную клавиатуру, генератор изображения, блок индикации с электронно-лучевой трубкой (ЭЛТ) и блок питания. Функциональная схема программируемого контролера изображен на рис. 3. 21. Пульт программирования и диагностики выполнен в виде переносного настольного устройства. В своем составе он имеет сенсорную клавиатуру, генератор изображения, блок индикации с электронно-лучевой трубкой (ЭЛТ) и блок питания. Функциональная схема программируемого контролера изображен на рис. 3. 21.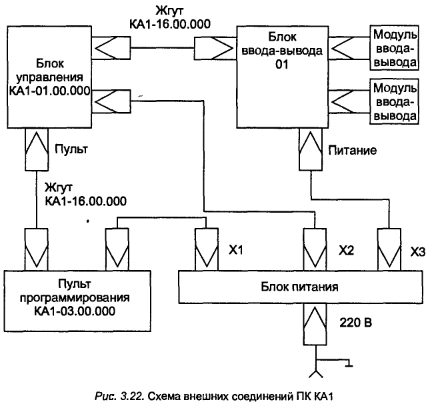 Рис. 3.22. Схема внешних соединений ПК КА1 Контроллер обеспечивает следующие режимы работы: • автоматический, при котором производится отработка рабочей программы, записанной в ОЗУ контроллера, а также (при необходимости) индикация рабочей программы с помощью пульта программирования и диагностики; • программирования, при котором обеспечивается ввод программы с помощью ППД в ОЗУ контроллера, а также контроль, редактирование программы. Цикл работы контроллера определяется рабочей программой, записанной в ОЗУ. Общий объем ОЗУ составляет 16К 16-разрядных слов. Под рабочую программу отводится 15К слов. Остальной объем памяти используется для хранения таблиц состояния входов-выходов, счетчиков-таймеров и их уставок, а также арифметических данных. Для стыковки контроллера с управляемым объектом конструктору необходимо разработать схему подключения внешних устройств (датчиков, исполнительных устройств). Кроме того, определяются необходимые задержки, технологические выдержки времени и счетчики. Исходя из этого определяется необходимое число модулей по типам. Модули в блоки ввода-вывода устанавливаются в те позиции, номера которых обозначены на электрической схеме. Схема внешних соединений ПК приведена на рис. 3.22. 3.2.8. Программируемый контроллер «МикроДАТ» «МикроДАТ» — микропроцессорные программируемые контроллеры диспетчеризации, автоматики, телемеханики. Они предназначены для управления оборудованием массового производства (металлорежущие станки, кузнечно-прессовые машины, литейные комплексы и т.д.), автоматическими линиями и манипуляторами, а также технологическими процессами в различных отраслях промышленности (станкостроительной, автомобильной, приборостроительной, деревообрабатывающей, угольной, нефтехимической, легкой и т.д.). ПК выполняют следующие функции: • управление работой технологического оборудования в соответствии с заданной программой, реализующей технологический алгоритм; • диагностирование управляемого технологического оборудования в соответствии с программой, разработанной пользователем на входном языке ПК; • осуществление связи по каналу последовательного радиального интерфейса с сервисным оборудованием, обеспечивающим ввод, вывод и редактирование программы пользователя; • осуществление связи с другими аналогичными ПК, с корректирующим микропроцессорным контроллером или ЭВМ верхнего уровня; • диагностирование состояния ПК с локализацией и сигнализацией отказов. Вышеперечисленные функции позволяют применять ПК в гибких автоматизированных производствах в качестве систем децентрализованного управления. Вся гамма контроллеров компонуется на основе трех типов компоновочных каркасов: на 4, 8 или 16 модулей ввода-вывода. Контроллеры с количеством входов-выходов до 152, 184 и 248 (соответственно МБ57.01, МБ57.02, МБ57.03) компонуются в виде одного блока управления с компоновочным каркасом на 16 модулей ввода-вывода и блока ввода-вывода на основе одного из трех компоновочных каркасов: на 4, 8 или 16 модулей ввода-вывода. Соединение двух блоков между собой в МБ57.04, МБ57.05, МБ57.06 осуществляется с помощью расширителя интерфейса (МС99.03), который состоит из двух плат и жгута связи этих плат. Длина жгута выбирается производителем. В блоке размещаются микропроцессорный контроллер, модули ввода-вывода и модуль электропитания. Функциональная схема контроллера приведена на рис. 3.23. Все эти средства устанавливаются в соответствующие гнезда компоновочного каркаса. Модули ввода-вывода устанавливаются в одни и те же гнезда; адрес модуля определяется гнездом, в котором он устанавливается. Замена модулей ввода-вывода производится без отсоединения проводов от клеммника. Микропроцессорный контроллер выполнен в виде двух субблоков. На лицевой панели контроллера размешены: переключатель «Под ключ» для выбора режимов работы, разъем для подключения сервисного оборудования, а также средства индикации режимов работы и диагностики неисправностей. Микропроцессорный контроллер содержит память пользователя, в которой пользователь посредством сервисного оборудования размещает таблицу данных (ТД), программы пользователя (ПРП), буквенно-цифровые сообщения (БЦС). Объем области памяти пользователя, отводимой для ТД, ПРП и БЦС, распределяется пользователем произвольно в режиме программирования и не должен превышать 4 Кбайт. Принцип работы контроллера - циклическое выполнение ПРП. При этом контроллер обеспечивает возможность. Таймеры отсчитывают время от О, I до 99,9 с с точностью 0,1 с и от 1 до 999 с с точностью 1 с. ПК имеют три режима работы: «Программирование», «Тестирование», «Работа». Электрическое питание контроллеров осуществляется однофазным переменным током с напряжением 110 или 220 В от разделительного трансформатора при допускаемом отклонении напряжения от -15 до + 10 % с частотой (50±2) Ги. Потребляемая мощность контроллера, Вт, не более: МБ57.01 — 65, МБ57.02 — 80, МБ57.03 — 100. Максимальное количество дискретных входов и выходов — до 248. Контроллер позволяет подключать входные сигналы постоянного и переменного тока различных уровней и формирует на выходе дискретные сигналы постоянного и переменного тока. Система команд контроллера обеспечивает выполнение следующих функциональных операций: логических, операций счета времени и числа импульсов, операций с данными, арифметических, операций игнорирования зоны программы, экстренного обращения к вводу-выводу, условного и безусловного переходов и др. Объем памяти пользователя, выделяемый для ТД, ПРП, БЦС, составляет 2000 слов (16 разрядов). Объемы области памяти пользователя, в которых размещаются ТД, ПРП, БЦС, задаются пользователем в режиме программирования. Область памяти пользователя, отводимая под ПРП, может быть (по выбору пользователя) оперативной энергонезависимой с подпиткой от резервного источника питания или перепрограммируемой со стиранием путем ультрафиолетового облучения. Время сохранения информации в энергозависимой памяти с подпиткой при отключении модуля электропитания составляет не менее года. Время выполнения операций, мкс: опрос входа — 7; возбуждение выхода — 9,5; счет времени и числа импульсов — 250; арифметические операции — 200. Программирование контроллеров осуществляется на языке символьного кодирования или посредством языка, описанного с помощью алгебры логики; в обоих случаях исходное описание алгоритма работы системы управления рекомендуется выполнять по релейно-контактной схеме. Программа состоит из шага программы, инструкции, операнда и комментария. Шаг задается четырехзначным десятичным числом в интервале 0000... 1984. Инструкция задается в виде релейных символов или эквивалентных им булевых знаков для базовых логических команд: ( — начало ветвления или открыть скобку; . — опрос прямого значения адресуемого операнда или логическое умножение на адресуемый операнд; ./ — то же инверсного значения; + — перенос маркера в начало ветвления или логическое сложение с операндом в следующем шаге; ) — конец ветвления или закрыть скобку; = — возбудить адресуемый выход; 5= — возбудить адресуемый выход и зафиксировать; К= — выключить адресуемый выход и зафиксировать. С помощью мнемокода описываются также работа таймеров, счетчиков, инструкции сравнения, арифметические инструкции, операции с файлами, экстренное обращение. Операнд задается в виде пятизначного восьмеричного кода для битов и в виде трехзначного кода для слов в соответствии с системой адресации ПК. Программа часто снабжается комментарием, который в структуру программы не входит и предназначен для личных пометок проектанта в листинге программы. Рабочая программа представляет собой укороченную последовательность инструкций. Цикловая программа подразделяется на восемь сегментов (00...07); каждый сегмент может состоять из 64 блоков (00...77). Число сегментов в программе и количество блоков в сегменте, а также порядок их следования могут быть произвольными. В простейшем случае вся программа может быть одним сегментом, а весь сегмент — одним блоком. Каждая программа вне зависимости от ее структуры должна начинаться инструкциями НСТОО (начало сегмента) и НБЛ00 (начало блока) и заканчиваться инструкциями НСТ77 (конец цикловой программы) и НПП77 (конец массива подпрограммы). Массив подпрограмм состоит из восьми входимостей (00...07). Вызов подпрограмм выполняет инструкция ВПП. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||