Тер Мех. Вариант 25++. Вариант 25. К125
 Скачать 0.59 Mb. Скачать 0.59 Mb.
|

|
Вариант 25. К1-25 По заданным уравнениям движения точки М установить вид ее траектории и для момента времени t= t1(с) найти положение точки на траектории, ее скорость, полное, касательное и нормальное ускорения, а также радиус кривизны траектории. Уравнения движения точки М x= 2cos(p t2 /3) - 2,см y= - 2 sin(p t2 /3) + 3, см t1=1c ( Рис.1) Решение. 1. Для определения уравнения движения траектории точки, исключим из заданных уравнений движения точки – время t . Из условия известно, что координаты движения точки задаются уравнениями x= 2cos(p t2 /3) - 2,см y= - 2 sin(p t2 /3) + 3, (1) Преобразуем зависимости /1/ следующим образом cos(p t2 /3)= cos2(p t2 /3)=( cos2(p t2 /3) + sin2(p t2 /3) =( (x+2) 2 + (y-3)2=22; Т.е. уравнение движения (2) (x+2) 2 + (y-3)2=22;Окружность с центром в т.О(-2;3),радиус R=2см. 2.Скорость точки найдем по ее проекциям на координатные оси: Общая скорость определяется по формуле Определим VX и VY из /3/ и /4/ при t1 =1 c VX = -3.63 см/с (6) VY = -2.09 см/с Из (5) имеем 3. Аналогично найдем ускорение точки: ax = [ Общее ускорение определяется по формуле Определим aX и aY из / 7 / при t1 =1 c aX = -8.00 см/с2 ; (9) aY = 7.59 см/с2 ; Из ( 8 ) имеем Касательное ускорение найдем, дифференцируя по времени равенство получим или Числовые значения всех величин входящих в правую часть выражений (10), определены и даются равенствами ( 6 ) и ( 9 ). Подставив в (11) эти числа, определим, что при t1 = 1 c Нормальное ускорение точки Подставляя в формулу (13) найденные числовые значения (10) и (12) a и a Радиус кривизны траектории определяем из формулы Подставляем сюда числовые значения V и an , найдем, что при t1 = 1 c Ответ: Итак, движение точки начинается из т.Мо (x= 0 см; y= 3 см), при t = 1с точка займет положение в т.М1 (x= - 1 см; y= 1.27 см).
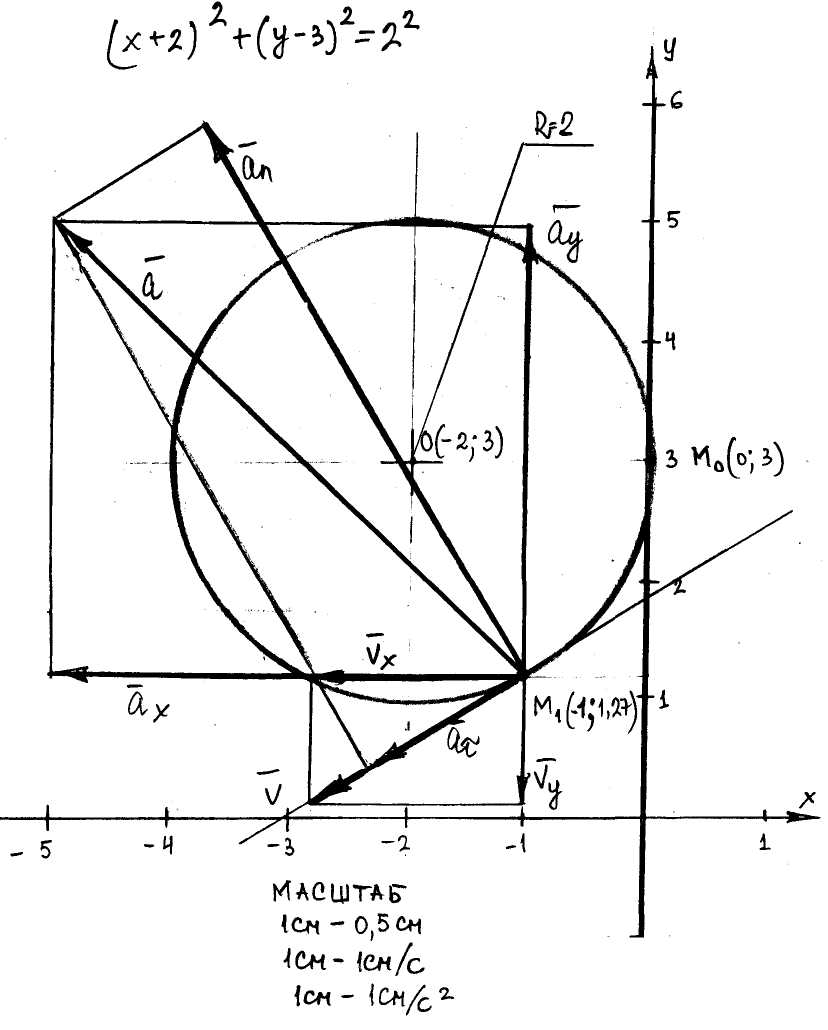 рисунок 1 K2-25 Требуется для заданного положения механизма определить скорости и ускорения точек В и С, а также угловую скорость и угловое ускорение звена, которому эти точки принадлежат. Необходимые для расчета исходные данные приведены в таблице 1, схема механизма на рис.1.
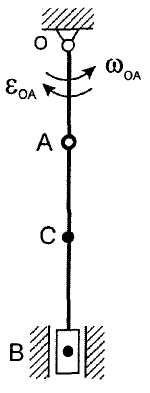 Рисунок 1 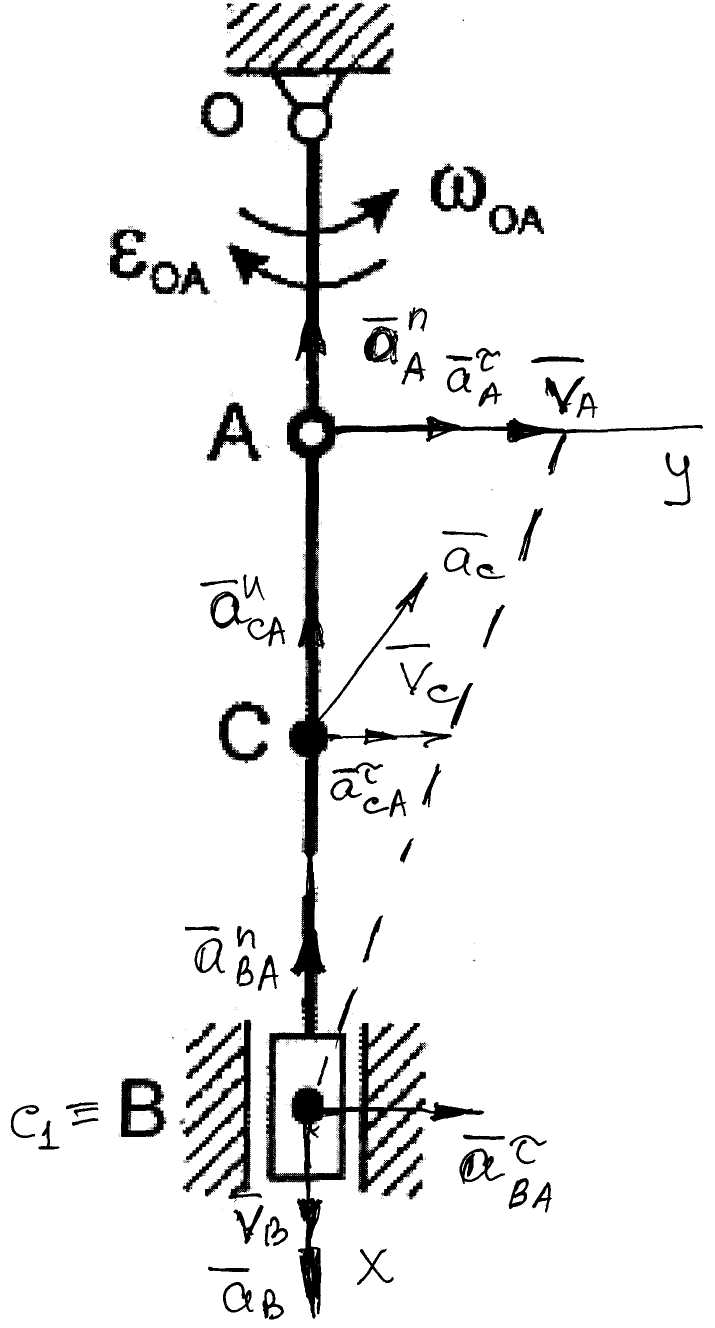 Рисунок 2 Решение. Механизм совершает плоскопараллельное движение (рисунок 2).Найдем МЦС (мгновенный центр скоростей) стержня АВ. Для этого восстановим перпендикуляры из точек Аи В ( Точка С1есть МЦС. Поскольку Поскольку Определим Точка В есть МЦС стержня АВ.  Определим ускорение точки В  Введем систему координат ХВУ. Спроецируем векторное равенство (2) на ось Х.  Спроецируем векторное равенство (2) на ось У.  Определим ускорение точки С  Спроецируем векторное равенство (3) на ось Х.  Спроецируем векторное равенство (3) на ось У.  Ответ:  K3-25 Прямоугольная пластинка вращается вокруг неподвижной оси О1О2по закону =f(t), ось О1О2перпендикулярна плоскости чертежа. Положительное направление отсчета угла показано стрелкой. По пластинке движется точка М с законом движения OM = f1(t). В момент времени t= 1 с определить абсолютную скорость (va) и абсолютное ускорение (аа ) точки М. Данные для решения задачи приведены в таблице 1 и на рис.1.
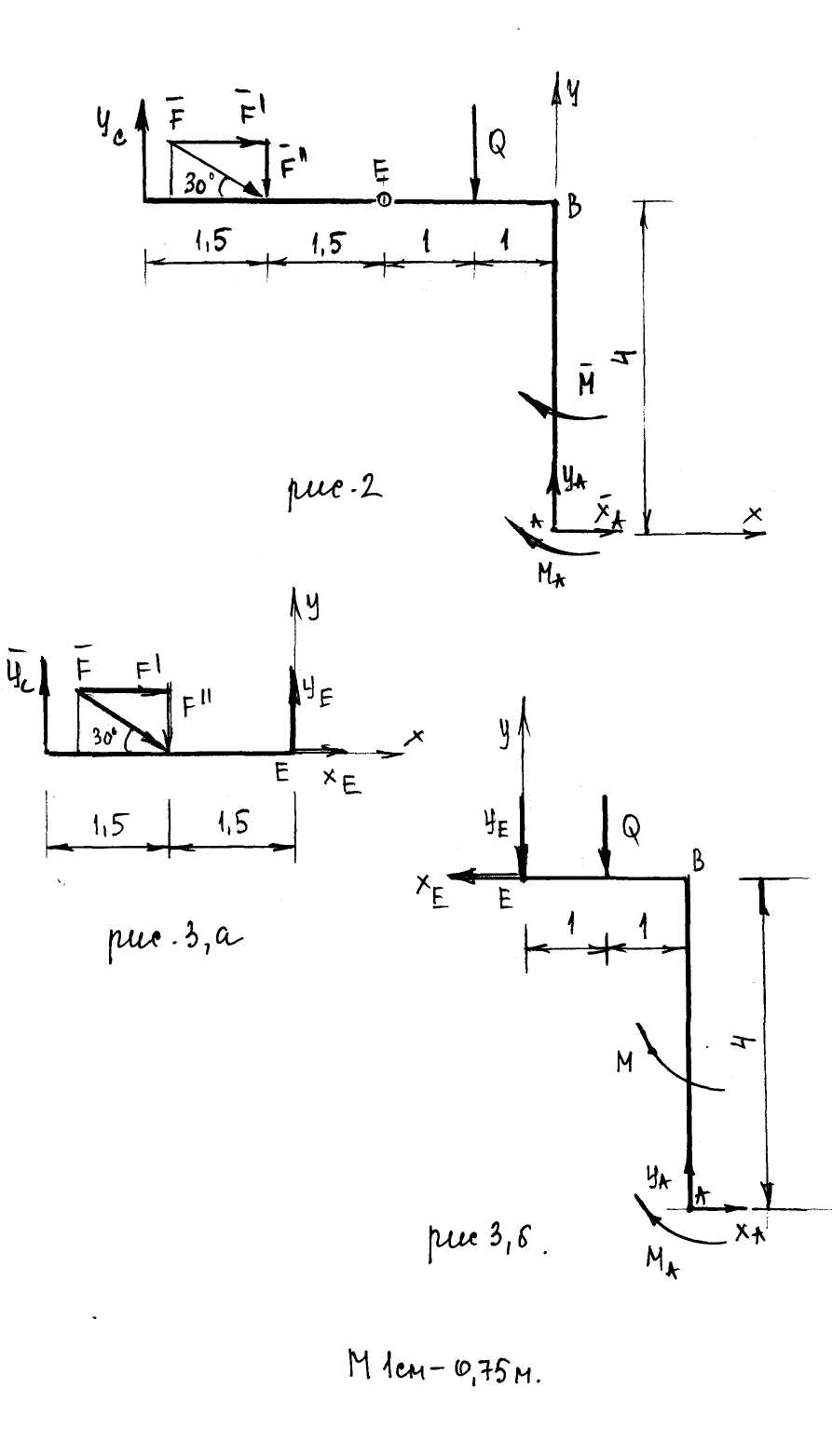
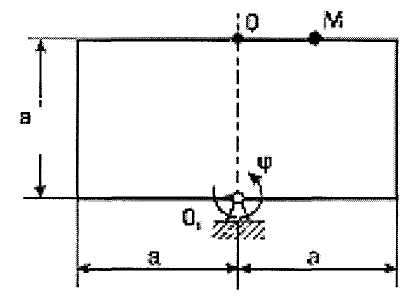 Рисунок 1. 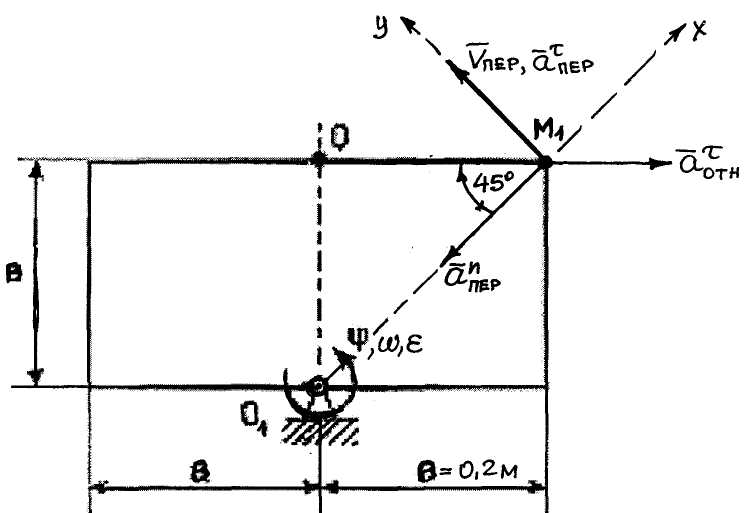 Рисунок 2 Решение. Точка М совершает сложное движение. Движется относительно прямоугольной пластинки и вместе с ней вращается вокруг оси О1О2. Тогда движение точки относительно пластинки будет относительным, движение вместе с ней - переносным. Будем считать, что в заданный момент времени плоскость чертежа совпадает с плоскостью прямоугольной пластинки. Положение точки М на пластинке определяется расстоянием sr = ОМ. Абсолютную скорость точки М найдем как геометрическую сумму относительной и переносной скоростей Абсолютное ускорение точки М Определим все характеристики относительного и переносного движения 1. Относительное движение. Это движение происходит по закону Сначала установим, где будет находиться точка М на момент времени t1 = 1 c . Полагая в уравнении (2) t1 = 1 c , получим Изображаем на рис.1 точку в положении, определяемым этим числом / точка М /. Находим числовые значения Здесь ОТН= При t=1c 2. Переносное движение. Это движение / вращение / происходит по закону Для определения VПЕР и аПЕР найдем расстояние h до точки М1 от оси вращения О1О2 . тогда в момент времени t1= 1 c , учитывая равенство /4/ VПЕР = | ω | ·h =0,4·0,28=0,113 м/с аτ ПЕР = ε · h =1,2+0,28=0,339 м/с2; аn ПЕР = ω2 · h =0,42 ·0,28 =0,045м/с2; Изображаем на рис.1 вектор VПЕР с учетом направления ω и вектор аn ПЕР / направлен к оси вращения /. 3. Кориолисово ускорение. Так как относительная траектория – плоская кривая и перемещается все время в своей плоскости, в этом при t1 = 1c аКОР = 2·| ω Поскольку аКОР = ω аКОР = 2·0,4·0=0; 4. Определение VАБС = 0+0,113=0,113м/с 5. Определение аАБС . По теореме сложения ускорений, так как Для определения и вычислим проекции вектора Учтем при этом, что вектор аКОР лежит на проведенной оси Х , а векторы аτОТН , VОТН расположены на проведенной оси У. С учетом этих равенств /3/,/5/,/6/ аАБСx = аАБСy = Отсюда находим значение аАБС в момент времени t1 = 1 c Ответ: VАБС = 0,113м/с; аАБС =1,691м/с2; C1-25 Дано: конструкция, состоящая из двух частей соединенных в точке Eшарниром (рис. 1.), удерживается двумя неподвижными шарнирными опорами в точках А и C. Конструкция нагружена сосредоточенной силой F= 3 q = 7 кН/м; α = 30°. Определить реакции опор А и C, а также шарнира E. 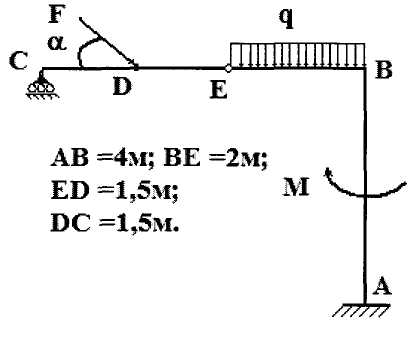 рисунок 1 Решение. Освобождаем конструкцию от связей, т.е. убираем опоры, заменяя их действие неизвестными силами в точках А и C(рис. 2). Для упрощения вычисления момента силы F разложим ее на вертикальную Fy и горизонтальную составляющие Fx (рис. 2 и 3): FX = F'= F·cos 30º . FY= F''= - F·sin 30º Для всей конструкции (рисунок 2) ΣiA =0 - MA – M – YC·5 + F·sin 30º ·3.5 + Q ·1 =0 (1) После подстановки данных и вычислений уравнение (1) примет вид - MA -8 – YC·5 + 3 - МА + YC·5 + 15.09 =0 МА = 15.09 - YC·5 (2) Рассмотрев систему уравновешивающихся сил, приложенных к части конструкции, расположенной левее шарнира E(рис. 3, a) Σ M YС = ΣYi=0; YC +YE – F·sin 30º =0 (4) YE = - YC + F·sin 30º = - 1.3 +3 Из (2) МA= 15.09 – YC ·5 = 15.09 – 1.3·5 = 8.59 кНм Для правой части конструкции (рисунок 3,б) ΣYi=0; YA – YE – Q =0 (5) YA = YE + Q = 1,3 +7·2 =15,3кН ΣMiE=0; YA ·2 + XA·4 – MA – M – Q·1 = 0 (6) XA = ΣXi =0 XA – XE=0 (7) XE = XA =0 Модули реакций опор А,С и шарнира E RA= RE = RC = YC=1.3 кН Результаты расчетов сведем в таблицу 1.
 C2-25 На вал с барабаном весом Qнамотана веревка, удерживающая груз весом Р, и насажено колесо радиусом rи весом G. Определить реакции подшипников А и В и момент М, приложенный к валу, в случае равновесия конструкции. Коэффициент трения f = 0,3 Схема конструкции приведена на рисунке 1. Числовые значения величин приведены в таблице 1.
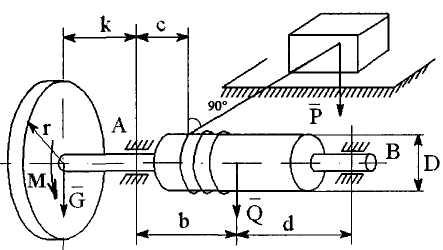 рисунок 1. 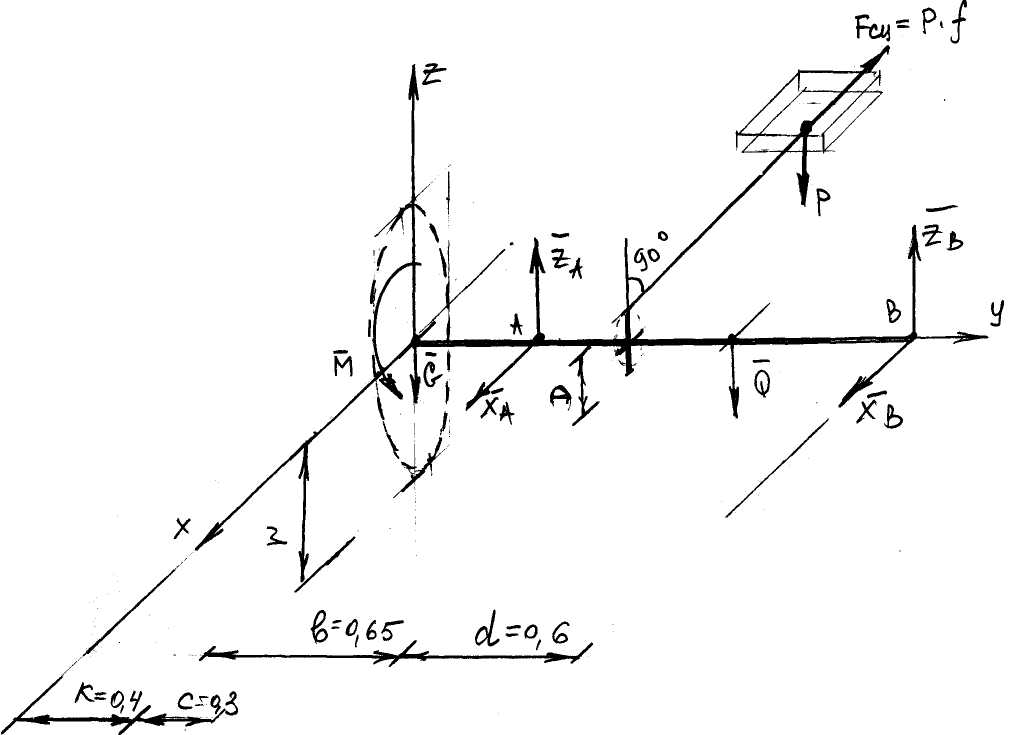 рисунок 2. Решение. В рассматриваемой задаче при равномерном вращении вала действующие на него силы удовлетворяют условиям равновесия. Проведем координатные оси (рис. 2) и изобразим действующие на вал силы: натяжение веревки P, составляющие XAZA XBZB реакций подшипников, момент М, приложенный к валу, скольжение вала отсутствует. Коэффициент трения f=0,3. Составляем уравнения равновесия. ΣFkX = 0; XA +XB - P·f =0 (1) ΣFkY=0; 0=0 (2) ΣFkZ=0; ZA+ ZB – G– Q -P = 0 (3) ΣX(Fk)=0; ZA·k + ZB(k+b+d) - Q(k+b) - P(k+c) =0 (4) ΣY(Fk)=0; M – P · ΣZ(Fk)=0; -XA·k – XB(k+b+d) + P·f(k+c)=0 (6) Подставим в уравнения все известные значения, уравнения примут вид: XA +XB -12·0.3 =0 (1) ZA+ ZB – 0.085– 0.75 -12 = 0 (3) ZA·0.4 + ZB(0.4+0.65+0.6) – 0.75(0.4+0.65) - 12(0.4+0.3) =0 (4) M – 12 · -XA·0.4 – XB(0.4+0.65+0.6) + 12·0.3(0.4+0.3)=0 (6) Из (5) M = 12· Из (1) XA = - XB + 12·0.3= -XB+3.6 Из (6) – (-XB+3.6)·0.4 – XB(0.4+0.65+0.6) + 12·0.3(0.4+0.3)=0 Отсюда XB = Из (3) ZA = - ZB + 12.84 Из (4) (- ZB +12.84)·0.4 + ZB(0.4+0.65+0.6) – 0.75·(0.4+0.65 ) -12(0.4+0.3)=0 Отсюда ZB= XA=2.74 кН; ZA=9.6 кН; XB=0.86 кН; ZB=3.24 кН ; M=1.32 кНм | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||