вект рег. Векторное управление избавляет практически от всех недостатков скалярного управления
 Скачать 468.98 Kb. Скачать 468.98 Kb.
|

|
между их векторами обеспечивается полное управление АД как в статике, так и в динамике, что дает заметное улучшение качества переходных процессов. Именно этот факт и является определяющим при выборе систем с векторным управлением. Информация о текущих значениях и пространственном положении векторов переменных АД может быть получена как прямым их измерением с помощью соответствующих датчиков, так и косвенно – на основе математической модели АД. Конфигурация и сложность такой модели определяются техническими требованиями к электроприводу. В общем случае подобные системы с косвенным регулированием координат электропривода изза нестабильности параметров АД и сложной их взаимосвязи уступают по своим статическим и динамическим показателям системам с прямым векторным управлением. При сложности вычислительных операций и алгоритмов управления электроприводом достоинство систем с косвенным регулированием заключается в простоте технических решений и, следовательно, в практической надежности. Когда требования к точности регулировки скорости допускают отклонение до 1,5%, а диапазон регулировки — не превышает 1 к 100, то бездатчиковая система вполне подойдет. Если же требуется точность регулировки скорости с отклонением не более 0,2%, а диапазон сводится до 1 к 10000, то необходимо наличие обратной связи по датчику скорости на валу. Наличие датчика скорости в системах векторного управления позволяет точно регулировать момент даже при низких частотах до 1 Гц. Векторное управление избавляет практически от всех недостатков скалярного управления. Для СД и АД принцип векторного управления можно сформулировать следующим образом: Первоначально система дифференциальных линейных уравнений трёхфазного двигателя преобразуется в систему уравнений обобщённой двухфазной машины, которая имеет две фазы (расположенные пространственно под 90° относительно друг друга) на статоре и две фазы на роторе, также взаимно расположенных. Затем все вектора, описываемые данной системой проецируются на произвольно вращающуюся ортогональную систему координат, с началом на оси ротора, при этом наибольшая простота уравнений получается при вращении системы координат со скоростью поля машины, кроме того при таком представлении уравнения вырождаются и становятся похожими на уравнения ДПТ, проецирование всех векторов на направление поля машины отражается в названии этого метода — «ориентирование по полю». Фактически вторым этапом формирования величин, ориентированных по полю — это замена обмоток двухфазной обобщённой машины (две на статоре и две на роторе) одной парой взаимно перпендикулярных обмоток, вращающихся синхронно с полем. Кроме характеристик, близких к характеристикам ДПТ, АДКЗ с ориентированием по полю имеет предельно допустимое быстродействие при управлении моментом в режиме поддержания постоянства потокосцепления. Уравнения электромагнитых процессов, записанные относительно токов статора и потокосцеплений ротора в синхронной ортогональной системе координат, ориентированной по вектору потокосцепления ротора имеют вид:  При этом могут быть два варианта метода: ориентирование по полю ротора ориентирование по полю главного потокосцепления При практической реализации первого метода необходимо определить направление и угловое положение вектора потокосцепления ротора двигателя. Ортогональные оси d, q (в отечественной литературе для асинхронных машин применяют оси x, y) направляют так, что ось d совпадает с направлением вектора потокосцепления ротора. Вектор напряжения статора двигателя регулируют в осях d, q. Составляющая напряжения по оси d регулирует величину тока статора по оси d. Изменяя ток статора по оси d следует добиваться требуемого значения амплитуды вектора потокосцепления ротора. Ток статора по оси q, контролируемый напряжением по этой оси, определит момент развиваемый двигателем. В таком режиме работы характеристики СД и АД подобны двигателю постоянного тока, так по оси d формируется поле машины (обмотка возбуждения для двигателя постоянного тока, то есть индуктор), а ток по оси q задаёт момент (якорная обмотка двигателя постоянного тока). Управление двигателем по данному методу теоретически обеспечивает большую перегрузочную способность АДКЗ, но при этом невозможно напрямую определить вектор потокосцепления ротора. Устройства с управлением по вектору главного потокосцепления двигателя, на русском языке стали именоваться векторными системами. При использовании устройства управления по вектору главного потокосцепления и стабилизации модуля главного потокосцепления двигателя во всех режимах работы исключается чрезмерное насыщение магнитной системы, упрощается структура управления АД. Для составляющих вектора главного потокосцепления (по осям α, β статора) возможно прямое измерение, например, с помощью датчиков Холла, устанавливаемых в воздушном зазоре двигателя. 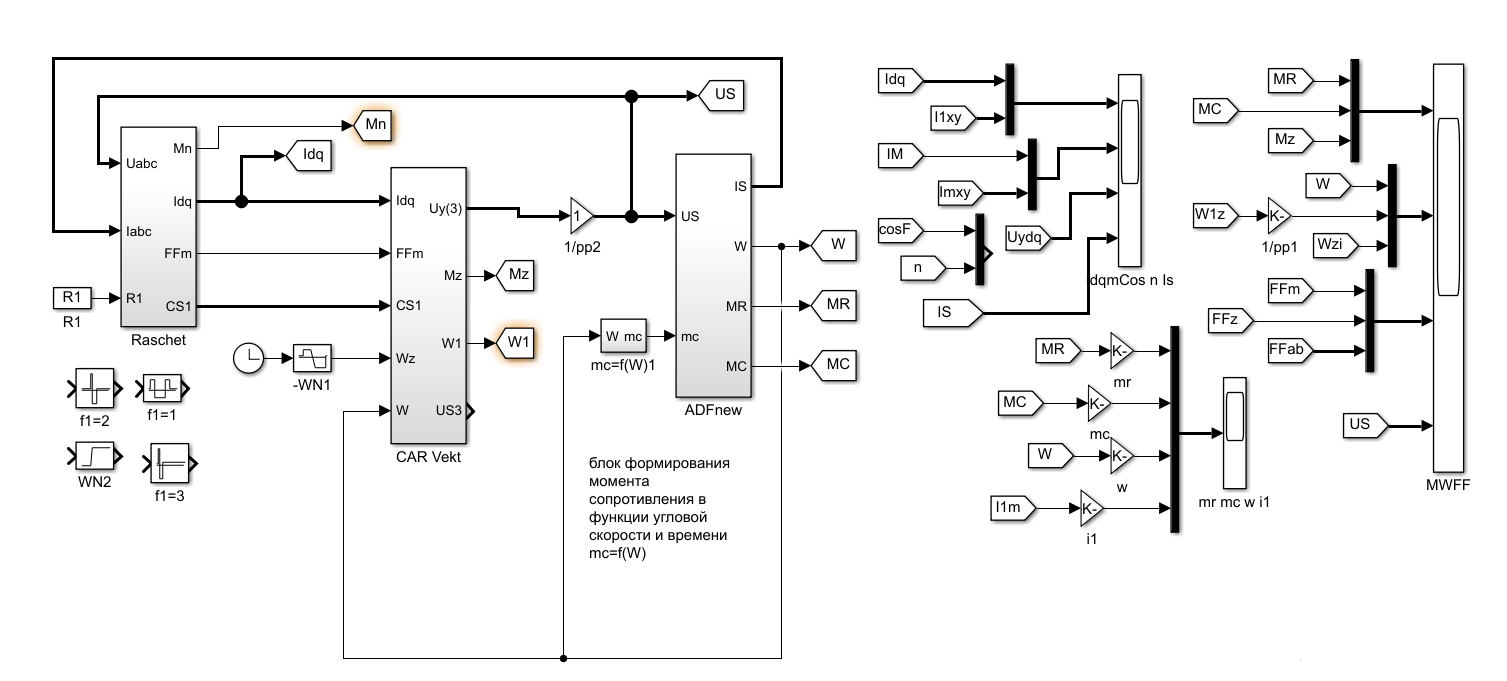 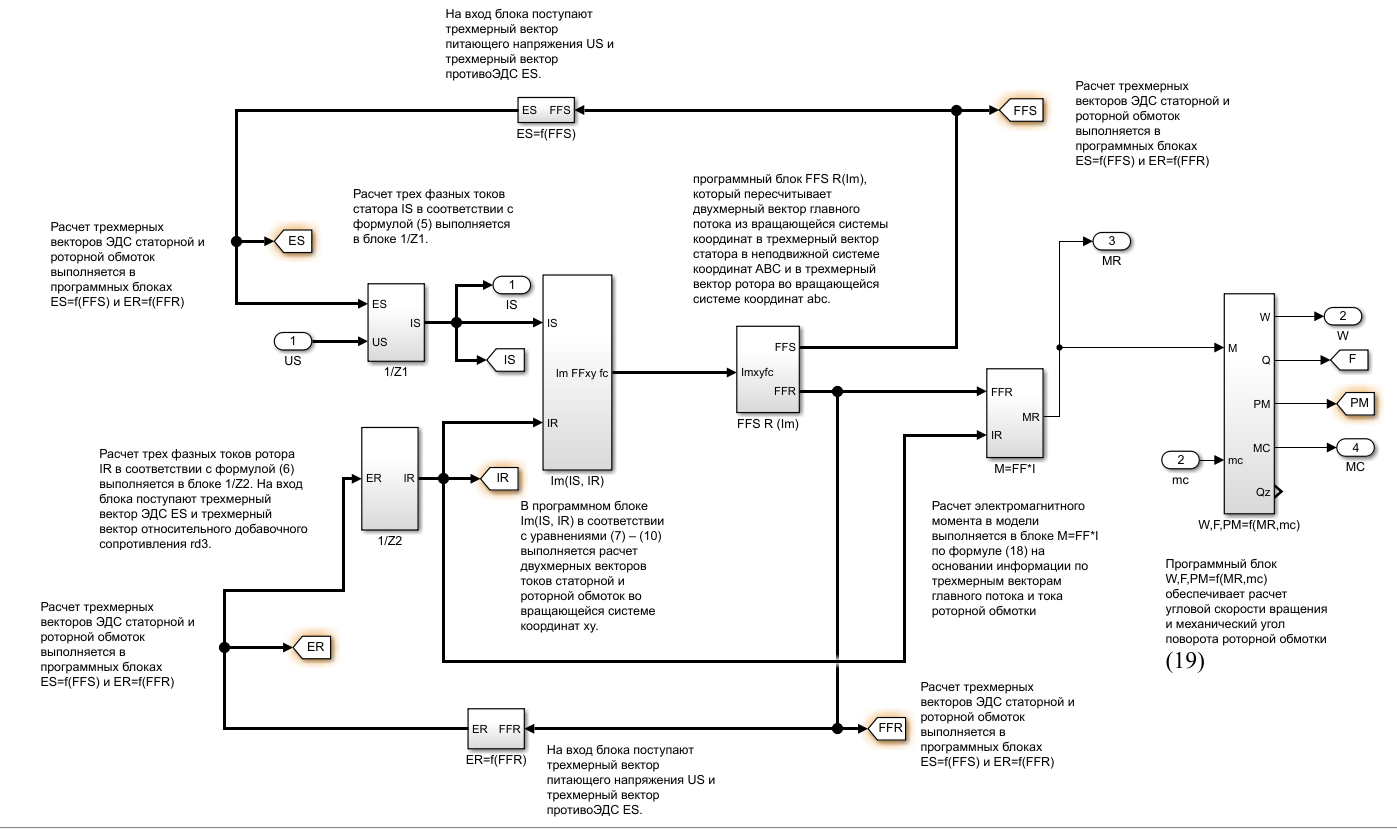 Рисунок 1 - Общий вид схемы 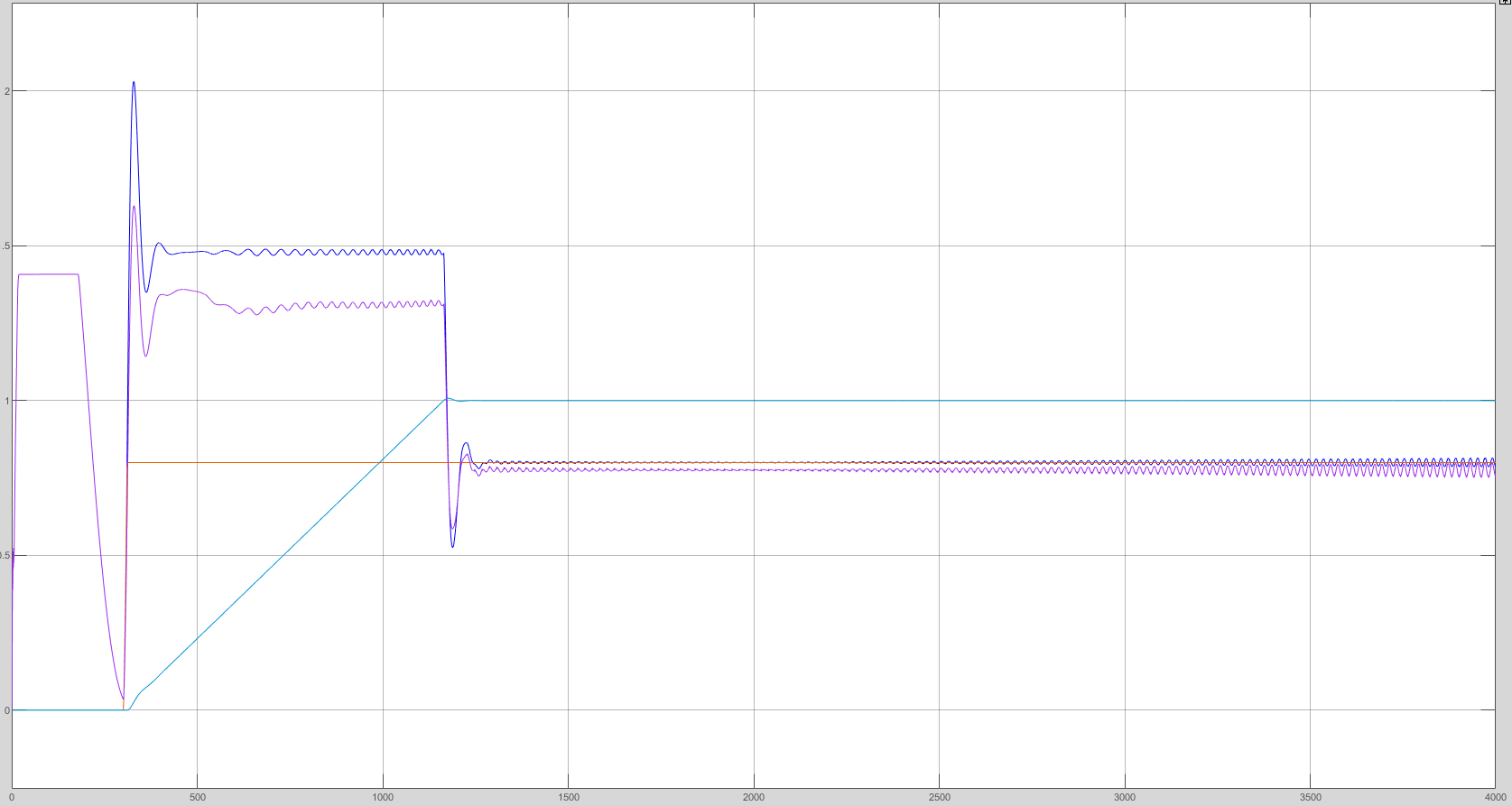  Mr    I W Mс Рисунок 2 - Пуск двигателя без нагрузки. Время переходного процесса составляет 800мс. Установившееся значение тока во время разгона: 1.35, ток хх: 0,8. 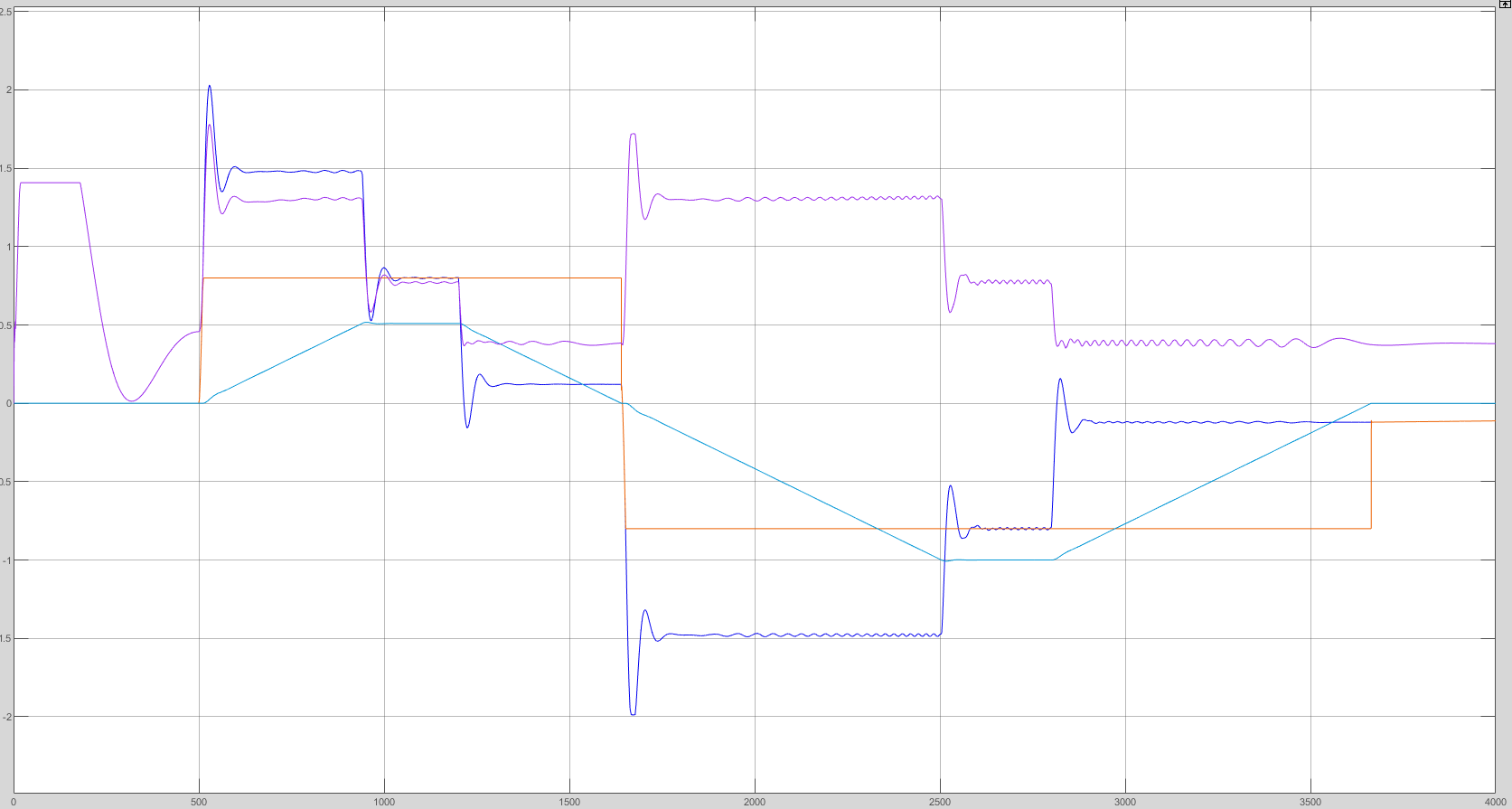     Mс W I Mr Рисунок 3 - Пуск по заданной траектории (разгон-реверс-торможение). Время разгона 450мс, время ухода в установившийся реверсивный режим 1250мс, время торможения 1000мс. Вывод Преимущества векторного управления: - высокая точность регулирования скорости; - плавный старт и плавное вращение двигателя во всем диапазоне частот; - быстрая реакция на изменение нагрузки: динамическая просадка скорости практически снижается во всем диапазоне регулирования, она гораздо меньше чем при скалярном регулировании; - увеличенный диапазон управления и точность регулирования; - снижаются потери на нагрев и намагничивание, повышается КПД электродвигателя. К недостаткам векторного управления можно отнести: - необходимость наличия всех параметров электродвигателя и их задания; - большая вычислительная сложность. |