шпоры. Вопрос 16. Визуальные методы определения места судна по пеленгам, расстояниям, пеленгам и расстояниям, горизонтальным и вертикальным углам.
 Скачать 329.5 Kb. Скачать 329.5 Kb.
|

|
2.Если размеры и особенно ориентировка треугольника погрешности в нескольких близких определениях меняются, то можно предполагать, что основное влияние оказывают случайные ошибки. 3.Если углы между пеленгами близки к 120° и получается равносторонний треугольник погрешности, то местом судна явится его центр, так как и при случайных, и при систематических ошибках вероятное место судна будет в этой точке. 4.При небольшом треугольнике погрешности (со сторонами менее 0,5 см) место судна можно принять в его центре, так как различные графические построения вряд ли приведут к улучшению результата. Определение места судна по двум горизонтальным углам С 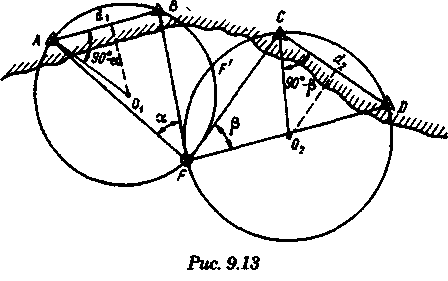 пособ определения места судна по двум горизонтальным углам можно применить, когда имеется сомнение в поправке компаса или когда требуется повышенная точность обсервации, например при ведении дноуглубительных работ, прокладке кабеля и др. пособ определения места судна по двум горизонтальным углам можно применить, когда имеется сомнение в поправке компаса или когда требуется повышенная точность обсервации, например при ведении дноуглубительных работ, прокладке кабеля и др.Горизонтальный угол можно измерить секстаном или подучить как разность измеренных компасных пеленгов. На карте место судна можно получить несколькими методами: графически, с использованием кальки или с использованием протрактора. Графическое решение. Если для определения места судна использованы четыре предмета (рис. 9.13), то строятся обе окружности. Чтобы найти центры и радиусы окружностей, вмещающие измеренные углы α и β при ориентирах А и В строятся углы 90° - α, при ориентирах С и D — углы 90°-β. Если углы α и β меньше 90°, то разности будут положительны и углы откладывают в сторону судна. Если α и β больше 90°, то эта разность будет отрицательна и углы откладывают в сторону от судна Решение может получиться двузначным, так как окружности пересекаются в двух точках. Однако на практике счислимое место судна бывает известно и устранить двузначность нетрудно. Е 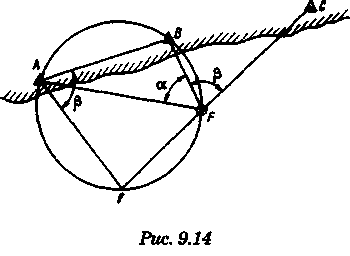 сли место судна определяется по трем смежным предметам, то построение упрощается сли место судна определяется по трем смежным предметам, то построение упрощается (рис. 9.14). Пусть построена окружность, вмещающая угол α между предметами А и В. При точке А отложим угол β и найдем вспомогательную точку f. Соединив эту точку с предметом С, получим место в точке F, так как углы fAB + BFf = 180°, угол BFf = 180°- β, а угол BFC = β. Этот прием лучше использовать тогда, когда предмет С находится далеко. Решение с использованием кальки. Из произвольной точки О на кальке следует провести прямую Оа и относительно этой линии построить углы α и β (рис. 9.15). Накладывая кальку на карту и перемещая ее, нужно добиться такого положения, при котором прямые Оа, Ob, Ос проходили бы через предметы А, В, С на карте. М 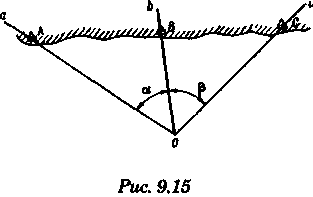 есто судна отмечается уколом циркуля в точке О. Если углы не смежные, этим приемом воспользоваться нельзя. есто судна отмечается уколом циркуля в точке О. Если углы не смежные, этим приемом воспользоваться нельзя.Использование протрактора. Протрактор имеет одну неподвижную линейку (центральную) в две подвижных. Необходимо установить на протракторе отсчеты углов α и β a центральную линейку направить на предмет В (средний). После того как линейки протрактора совместятся с предметами А, В и С, находят место судна в центре протрактора. Выше предполагалось, что оба угла измерены одновременно. На практике это можно сделать только при наличии двух наблюдателей. Если наблюдатель один, то измерять углы необходимо одномоментно. Для этого сначала измеряют один угол, например α1 затем угол β и опять угол α2. Предполагая что за небольшой промежуток времени угол α изменяется линейно, можно принять для момента измерения угла β среднее значение Показания лага и время замечают на момент измерения угла β. Этот метод имеет смысл применять только при использовании карт крупного масштаба или при производстве высокоточных обсерваций. Обычно для уменьшения ошибок от неодновременности измерений достаточно первоначально измерить тот угол, смещение линии положения которого за время движения судна между наблюдениями будет наименьшим. Если трудность измерения углов различна, то сначала лучше произвести более трудоемкое наблюдение, тогда время и отсчет лага должны быть отнесены к моменту второго наблюдения. Анализ точности. Случайные ошибки в измерении горизонтальных углов секстаном равны 1...2', систематические могут быть учтены с такой же точностью. Графические ошибки при построении места судна на карте в 3...4 раза превышают ошибки наблюдений. Поскольку ошибки прокладки носят случайный характер, то при анализе точности ограничимся рассмотрением лишь случайных ошибок. Для вычисления смещений воспользуемся формулами 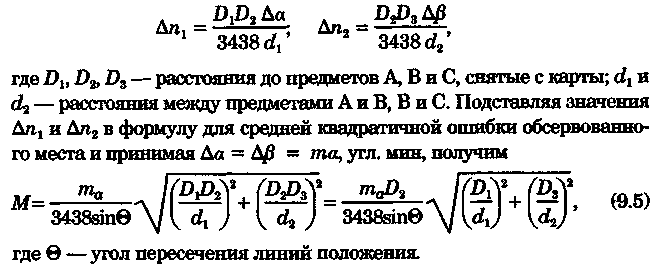 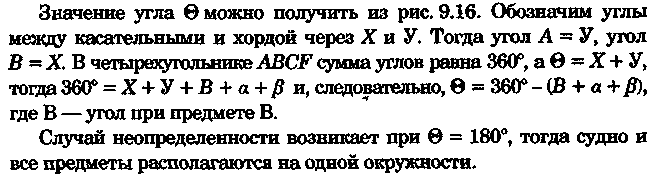 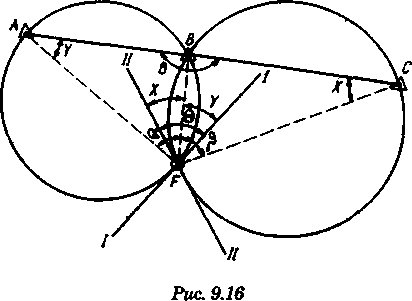 При Θ = 0° все предметы и судно будут располагаться на одной прямой. Из рис. 9.17 видно, что в какой бы точке ни находилось судно (F или F'), значения углов α и β будут одинаковыми. Для избежания случая неопределенности надо подбирать ориентиры так, чтобы В + α + β > 180°. Это условие будет соблюдаться в случаях: а) если ориентиры располагаются на одной прямой (рис. 9.19, а) б) если судно находится внутри треугольника, образованного ориентирами (рис. 9.19, б); в) если средний ориентир расположен ближе к судну, чем крайние (рис. 9.19, в). П 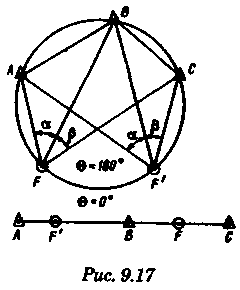  редположим, что один из измеренных углов, например β равен нулю, это не влияет на решение задачи, важно, чтобы сумма В + α + β ≠ 360° или 180°. Это видно из рис. 9.18, когда место судна определяется по створу и углу. редположим, что один из измеренных углов, например β равен нулю, это не влияет на решение задачи, важно, чтобы сумма В + α + β ≠ 360° или 180°. Это видно из рис. 9.18, когда место судна определяется по створу и углу.Точность места, полученного по двум горизонтальным углам, в общем случае повышается при приближении наблюдателя к среднему предмету. Достоинство способа в том, что он не зависит от знания поправки компаса. Если одновременно с измерением углов взять КП одного из ориентиров, то, получив место судна по двум углам и сняв с карты ИП того же ориентира, можно рассчитать поправку компаса по формуле ∆К = ИП-КП Н 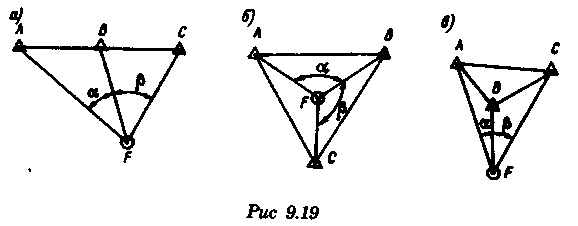 едостатки способа — наличие случая неопределенности, отсутствие контроля и необходимость иметь в видимости, как минимум, три ориентира. едостатки способа — наличие случая неопределенности, отсутствие контроля и необходимость иметь в видимости, как минимум, три ориентира.Определение расстояний в море Расстояние в море можно определить несколькими методами: с использованием дальномеров, по вертикальному углу, измеренному секстаном, по данным РЛС и глазомерно. Д 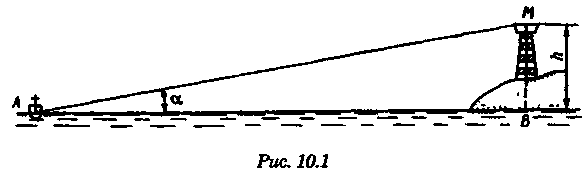 альномеры представляют собой оптические приборы, измеряющие расстояния до видимого предмета на основе различных принципов. альномеры представляют собой оптические приборы, измеряющие расстояния до видимого предмета на основе различных принципов. Так, например, горизонтально - базисные дальномеры автоматически решают треугольник по известному основанию (базе прибора) и противоположному углу, измеряемому оптическим устройством. Стереоскопические дальномеры основаны на свойстве человеческого глаза различать глубину пространства. В них решается вертикальный прямоугольный треугольник по известной высоте предмета и измеренному противоположному углу. Точность измерения расстояний дальномерами зависит от базы прибора и измеряемого расстояния. На судах морского флота дальномеры не нашли применения и расстояния измеряются с помощью РЛС или, когда возникает необходимость, с помощью секстана, позволяющего измерять угол с высокой точностью. Задача определения расстояния до предмета, расположенного ближе видимого горизонта, может быть решена двумя путями — измерением вертикального угла между вершиной предмета и его основанием или между вершиной предмета и урезом воды у береговой черты. В последнем случае в расчет вводится высота предмета над уровнем моря. В морях с приливами необходимо учитывать высоту прилива, так как высота объекта в пособиях приводятся, как правило, от среднего уровня полных сизигийных вод. При измерении вертикального угла от основания объекта возникают затруднения, так как не всегда возможно распознать основание на фоне береговой черты или строений. При измерении вертикального угла следует различать три случая: а) основание предмета находится ближе видимого горизонта и высота предмета известна. Тогда, измерив вертикальный угол α, можно рассчитать расстояние до предмета (рис. 10.1). Принимая участок моря за плоскость, из ∆АВМ получим Для получения D в морских милях необходимо h выразить в морских милях, a tg α заменить углом, тогда 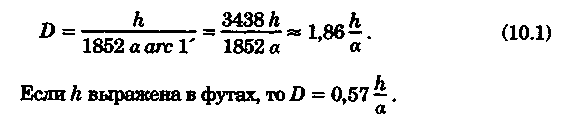 При обработке наблюдения необходимо учитывать поправку индекса i и инструментальную поправку s секстана, т. е. где ос — отсчет секстана. Земная рефракция для основания и вершины будет примерно одинаковой, поэтому ее можно не учитывать. Формула (10.1) получена из предположения, что высота глаза равна нулю и предмет находится непосредственно у уреза воды. На практике эти условия выполняются редко, поэтому в расчетах бывают ошибки. 1. Ошибки из-за пренебрежения высотой глаза наблюдателя. 2. Ошибки при измерении вертикального угла ориентира, удаленного от береговой черты на расстояние L…(в уч. Есть еще какой-то бред про точность, но я на его забил ) Определение места судна по измеренным расстояниям Е 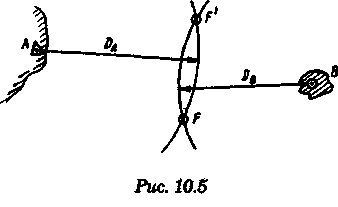 сли в видимости судна имеются два ориентира, до которых измерены расстояния (по вертикальному углу или по данным РЛС), то обсервованное место судна можно получить по двум расстояниям. Пусть А и В—два объекта, до которых измерены расстояния DA и DB. Известно, что измеренному расстоянию соответствует изолиния — окружность радиусом, равным этому расстоянию, и с центром в точке расположения ориентиров. Если оба наблюдения сделаны одновременно, то, проложив две окружности, в одной из точек получим место судна (рис. 10.5). Вопрос о том, какую из двух точек считать обсервованным местом, легко решается путем сопоставления со счислимым местом. сли в видимости судна имеются два ориентира, до которых измерены расстояния (по вертикальному углу или по данным РЛС), то обсервованное место судна можно получить по двум расстояниям. Пусть А и В—два объекта, до которых измерены расстояния DA и DB. Известно, что измеренному расстоянию соответствует изолиния — окружность радиусом, равным этому расстоянию, и с центром в точке расположения ориентиров. Если оба наблюдения сделаны одновременно, то, проложив две окружности, в одной из точек получим место судна (рис. 10.5). Вопрос о том, какую из двух точек считать обсервованным местом, легко решается путем сопоставления со счислимым местом.Ошибки в определении места судна по двум расстояниям зависят от трех факторов: н 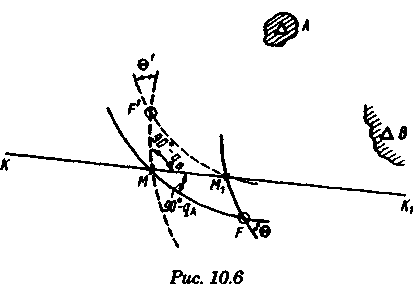 еодновременности измерения расстояний, еодновременности измерения расстояний, ошибок измерений и угла пересечения линий положения. Чтобы уменьшить влияние неодновременности измерения расстояний, нужно первым измерять расстояние до предмета, который находится ближе к траверзу, так как смещение линии положения из-за движения судна в этом случае будет меньше (рис. 10.6). Пусть А и В — два ориентира, по которым определяется место судна. Бели первым, когда судно находится в точке М, измерить расстояние до ориентира А, вторым, когда судно находится в точке М1 — до ориентира В, то получим место в точке F. При обратном порядке измерения расстояний место судна получается в точке F'. Поскольку всегда целесообразно определять место судна в момент последних наблюдений, сравним отрезки FM1 иF'M1.   Из равенства (10.7) видно, что для уменьшения ошибки, вызванной неодновременным измерением расстояний, первое наблюдение нужно делать до ориентира, расположенного ближе к траверзу. Для исключения ошибки от неодновременности измерения расстояний можно произвести осреднение первого наблюдения, если его повторить после второго. Если между измерениями расстояний промежуток времени составляет несколько минут, то выполняется графическое приведение линий положения к одному моменту. Для этого вторая линия положения смещается по курсу на величину пройденного расстояния, за данный промежуток времени. Средняя квадратичная погрешность обсервованного места по двум расстояниям получается, если в общую формулу (8.12) подставить значения ошибок линий положения, помня, что градиент расстояния равен единице:  Определение места судна по крюйс-пеленгу Е 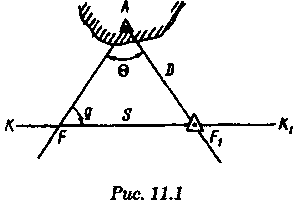 сли в видимости судна имеется только один ориентир, который можно использовать для взятия пеленга, наблюдатель, находящийся на стоящем судне, получит одну линию положения. Место в этом случае определить нельзя. Положение меняется, если наблюдатель находится на движущемся судне и элементы движения известны. сли в видимости судна имеется только один ориентир, который можно использовать для взятия пеленга, наблюдатель, находящийся на стоящем судне, получит одну линию положения. Место в этом случае определить нельзя. Положение меняется, если наблюдатель находится на движущемся судне и элементы движения известны.Обозначим через КК1 линию пути судна (рис. 11.1). Когда судно находилось в точке F, был взят первый пеленг ориентира А. Через некоторое время из точки F1 взят второй пеленг того же ориентира. Если путь судна и пройденное расстояние известны, то, вычислив угол Θ — разность пеленгов и угол q — курсовой угол предмета А в момент первого измерения пеленга, можно рассчитать D — расстояние до предмета А в момент второго измерения пеленга. Из ∆FAF1 При определении по крюйс-пеленгу место судна будет в точке пересечения двух линий положения: второго пеленга и окружности радиусом D с центром в точке А. Так как вторая линия положения получается через элементы счисления (S и q), то место, найденное этим методом, называется счислимо-обсервованным. На практике для нахождения места судна вместо расчетов D, пользуются графическим решением (рис. 11.2). По линии пути судна KK1 или по линии пути К1 проложенной на карте от предмета А, откладывают от точки пересечения с линией первого пеленга n пройденное судном расстояние S за время между пеленгами и из полученной точки m прокладывают прямую, параллельную первому пеленгу, до пересечен 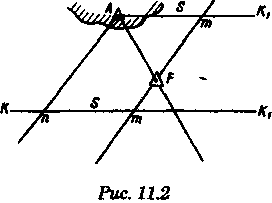 ия со вторым. Это будет приведенная линия положения; в точке пересечения этой линии со вторым пеленгом будет место судна (точка F на рис. 11.2). Определение места судна по крюйс-пеленгу может быть еще истолковано как перенос первой линии положения по счислению параллельно самой себе к моменту получения второй линии положения. ия со вторым. Это будет приведенная линия положения; в точке пересечения этой линии со вторым пеленгом будет место судна (точка F на рис. 11.2). Определение места судна по крюйс-пеленгу может быть еще истолковано как перенос первой линии положения по счислению параллельно самой себе к моменту получения второй линии положения.Е 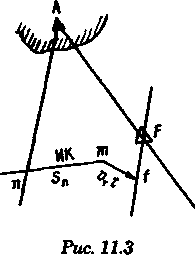 сли нет дрейфа и течения, пройденное судном расстояние по показаниям лага, исправленное его поправкой, откладывают на линии ИК, а при дрейфе — на линии пути судна Причем для лагов, жестко скрепленных с корпусом судна, необходимо откладывать не просто SЛ, a SлSecα (α — угол дрейфа). сли нет дрейфа и течения, пройденное судном расстояние по показаниям лага, исправленное его поправкой, откладывают на линии ИК, а при дрейфе — на линии пути судна Причем для лагов, жестко скрепленных с корпусом судна, необходимо откладывать не просто SЛ, a SлSecα (α — угол дрейфа).При наличии течения, когда элементы его известны, плавание судна между пеленгами нужно проложить с учетом действующего течения. Для этого (рис. 11.3) из произвольной точки n на первом пеленге прокладываем линию ИК судна и плавание его по лагу за время между пеленгованиями. Из полученной точки m прокладываем отрезок, равный сносу от течения за тот же промежуток времени mf = vtt, и через точку f проводим прямую, паралельную первому пеленгу. При аналитическом учете течения на линии пути необходимо отложить расстояние, пройденное судном относительно грунта: 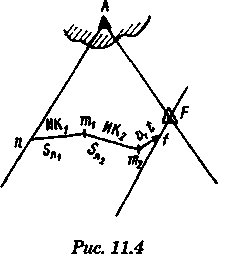 Если за время определений судно меняло курс, то между пеленгами необходимо отложить все отрезки ИК и SЛ (рис. 11.4). Способ крюйс-пеленга можно использовать и для определения места судна по разновременным пеленгам двух предметов, причем решение в этом случае существенных отличий не имеет. Рассматривая способ крюйс-пеленга как определение места судна по двум линиям положения (первой приведенной и второй линией положения), напишем формулу для средней квадратичной ошибки обсервованного места где mл1, mл2 — средние квадратичные ошибки первой и второй линий положения; mр — средняя квадратичная ошибка приведенной линии положения, обусловленная ошибками в направлении и величине перемещения судна, средние квадратичные ошибки которых равны mк и ms |