шпоры. Вопрос 16. Визуальные методы определения места судна по пеленгам, расстояниям, пеленгам и расстояниям, горизонтальным и вертикальным углам.
 Скачать 329.5 Kb. Скачать 329.5 Kb.
|

|
q = ПУ - ИП — угол между линией пути и первым пеленгом. Подставим значение mр в формулу (11.3) и получим значение средней квадратичной ошибки счислимо-обсервованного места, приняв Из формулы (11.4) следует, что место точнее определяется при уменьшении расстояния до предмета и при значениях углов q и Θ, близких к 90°. Однако эти условия несовместимы, так как с увеличением q и Θ увеличивается расстояние. В общем случае место судна наиболее точно получается при q = 50...80°, Θ = 50...70°. Рассматривая способ определения места судна по крюйс-пеленгу следует отметить, что наибольшие ошибки возможны при неверном учете течения. Поэтому пренебрежение к учету течения недопустимо. Р 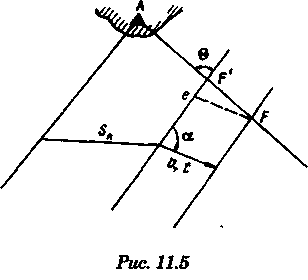 ассмотрим влияние ошибок элементов течения (или ошибок из-за неучтенного течения) на получение счислимо-обсервованного места. ассмотрим влияние ошибок элементов течения (или ошибок из-за неучтенного течения) на получение счислимо-обсервованного места. На рис. 11.5 точка F’ — место судна, полученное по крюйс-пеленгу без учета течения, a F—действительное место судна. Из ∆FF’e имеем Отсюда ошибка в определении места из-за того, что не было учтено течение, определится из выражения где α — угол между первым пеленгом и направлением течения; t — промежуток времени между пеленгованиями; Vt — скорость течения. Из формулы (11.5) видно, если α = 0°, то FF’ также равно нулю, а следовательно, течение не вызовет ошибки в полученном месте судна. Поэтому, если взять первый пеленг по направлению течения, то место судна, полученное по крюйс-пеленгу, будет свободно от ошибки в учете течения. Определение места судна по крюйс-расстоянию Е 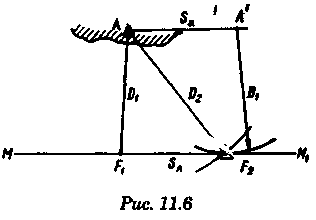 сли в видимости судна имеется один ориентир и представляется возможным дважды измерить расстояние до него (по вертикальному углу или по РЛС), то место судна можно получить способом сли в видимости судна имеется один ориентир и представляется возможным дважды измерить расстояние до него (по вертикальному углу или по РЛС), то место судна можно получить способом крюйс-расстояния (рис. 11.6). Пусть ММ1 — линия пути судна. Когда оно находилось в точке F1 было измерено расстояние D1 до ориентира, а через некоторое время из точки F2 — расстояние D2. Полагая, что путь судна и пройденное расстояние SЛ между наблюдениями известны, место судна можно получить несколькими способами, но самым простым является геометрический. От ориентира А по направлению, параллельному линии пути судна, следует отложить пройденное расстояние SЛ. Тогда точка F2, представляющая собой место судна в момент наблюдений, может быть найдена как место пересечения двух окружностей радиусами D1 и D2, с центрами в точках А' и А. Этот метод можно применить, когда трудно запеленговать объект, с целью уменьшения влияния случайных ошибок пеленгования. Точность способа зависит от ошибок в измерении расстояний, ошибок счисления за время плавания между наблюдениями и угла между линиями положения. Влияние ошибок счисления будет таким же, как и в способе крюйс-пеленга. Методы повышения точности определения места судна по разновременным линиям положения Как было показано выше, основной причиной невысокой точности счислимо-обсервованного места является неточное знание пройденного расстояния. Для повышения точности обсервованного места были предложены методы, в основе которых лежит принцип вмещения между пеленгами отрезков, пропорциональных промежуткам времени или разностям отсчетов лага. К таким методам следует отнести метод исправленного крюйс-пеленга и метод исправленного крюйс-расстояния. И 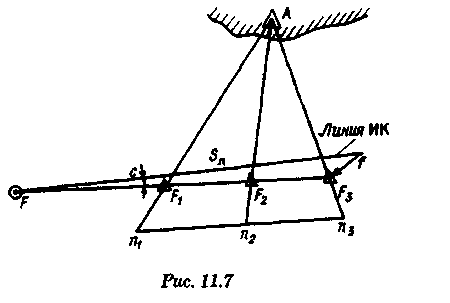 справленный крюйс-пеленг. Впервые был предложен гидрографом Н. Н. Струйским. Идея метода сводится к следующему. Как известно, если взять три пеленга одного ориентира, то можно получить линию, параллельную пути судна, n1n2n3 (рис. 11.7). справленный крюйс-пеленг. Впервые был предложен гидрографом Н. Н. Струйским. Идея метода сводится к следующему. Как известно, если взять три пеленга одного ориентира, то можно получить линию, параллельную пути судна, n1n2n3 (рис. 11.7).Если за время плавания судна от последней обсервации F до конца наблюдения его скорость и курс, а также элементы сноса постоянны, то линия пути судна должна проходить через последнюю обсервацию (точка F) и, следовательно, линия FF1F2F3 будет представлять линию пути судна. Проведя линию ИК и отложив SЛ, можно получить вектор fF3 — элементы сноса за время плавания от точки F до F3. Е Соединив точку m с предметом А и проведя nl, параллельную mА, получим П 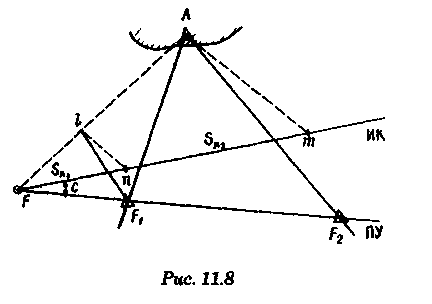 роведя из точки l прямую lF1 параллельную второму пеленгу, получим точку F1 — место судна в момент взятия первого пеленга, продолжив линию FF1 получим точку F2 — место судна в момент взятия второго пеленга, а также линию пути FF1F2, так как роведя из точки l прямую lF1 параллельную второму пеленгу, получим точку F1 — место судна в момент взятия первого пеленга, продолжив линию FF1 получим точку F2 — место судна в момент взятия второго пеленга, а также линию пути FF1F2, так какПостоянная ошибка в поправке лага не окажет влияния на окончательный результат, так как при построении было использовано лишь отношение пройденных расстояний. Расстояние mF2 будет равно сносу за время плавания судна от точки F до момента взятия второго пеленга. Исследование точности этого способа по сравнению с определением места по крюйс-пеленгу показывает, что, если элементы сноса постоянны, то способ дает более точный результат. И 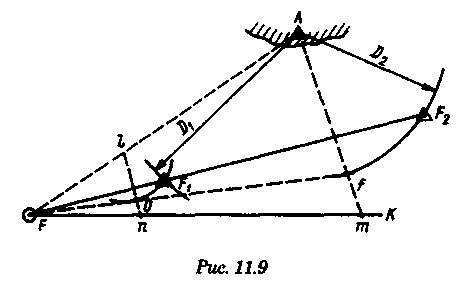 справленное крюйс-расстояние. Если имеется надежная обсервация, полученная по двум или более ориентирам, ее можно использовать, как и в способе исправленного крюйс-пеленга, для повышения точности определения места судна. справленное крюйс-расстояние. Если имеется надежная обсервация, полученная по двум или более ориентирам, ее можно использовать, как и в способе исправленного крюйс-пеленга, для повышения точности определения места судна.Пусть точка F — надежная обсервация, А — неподвижный предмет, до которого можно измерить D1 и D2 — расстояния в фиксированные моменты времени (рис. 11.9). Будем полагать, что курс и скорость судна и элементы сноса на участке наблюдений постоянны и неизвестны. Для решения из точки F проводим прямую FK (это может быть линия ИК) и откладываем на ней отрезки Fn и nm, пропорциональные промежуткам времени t1 и t2 или плаванию по лагу S1 и S2. Соединив точки m и А, проведем линию nl, параллельную mА. На прямой Аm от точки А отложим измеренное расстояние D2 и полученную точку соединим с F. Затем из точки / радиусом lO делаем засечку на окружности радиусом D1. Полученная точка FF1 будет местом судна в момент измерения D1 Продолжив линию FF1 до пересечения с окружностью радиусом D2, получим точку F2 — место судна на момент измерения D2 — на основании соотношения Этот метод позволяет получить счислимо-обсервованное место и линию пути судна. Ошибка в поправке лага, если она постоянная, на точность результата не влияет. Метод позволяет вести прокладку при неизвестных показаниях лага. Т 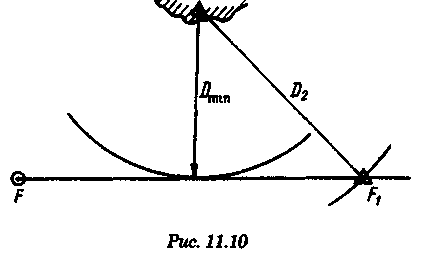 очность результата зависит от того, насколько точно измерены расстояния, а также от постоянства курса, скорости и элементов сноса. очность результата зависит от того, насколько точно измерены расстояния, а также от постоянства курса, скорости и элементов сноса.Можно использовать частный случай, когда D1 = Dmin, т. е. измеряется минимальное расстояние до предмета Проложив окружность радиусом Dmin, следует провести линию пути, касательную к этой окружности. Сделав засечку на этой линии радиусом, равным D2 (т.е. расстоянием, измеренным повторно), получим точку F1 — счислимо-обсервованное место (рис. 11.10). С 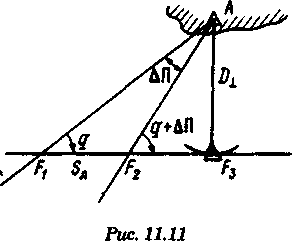 пособ траверзных расстояний. Если с судна в моменты Т1, и Т2 взять пеленги ориентира А и рассчитать q = ИК-П1 и пособ траверзных расстояний. Если с судна в моменты Т1, и Т2 взять пеленги ориентира А и рассчитать q = ИК-П1 и ∆П = П2-П1 (рис. 11.11), то можно найти D┴ —расстояние в момент траверза. Из ∆AF1F2 по формуле синусов получим 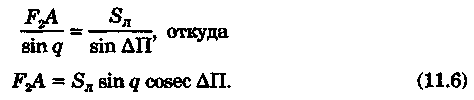  Значение коэффициента М приведено в табл. 30 МТ-75. Выбрав М по аргументам q и ∆П, рассчитывают траверзное расстояние. В момент прохождения траверза величину D, откладывают от ориентира А и получают точку F3 — счислимо-обсервованное место судна. Способ удобен тем, что пеленгование можно производить до и после прохождения траверза, а также в момент траверза. При хорошей работе лага способ дает достаточно точные результаты. Общее графическое решение задачи определения места судна по разновременным линиям положения П 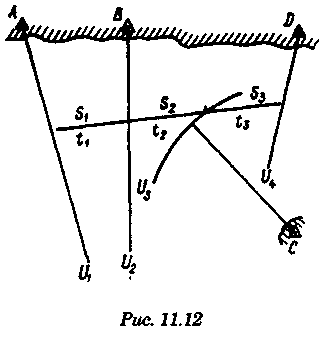 ри отсутствии обсерваций, чтобы исключить ошибки счисления при определении места судна по разновременным линиям положения, необходимо произвести четыре наблюдения и проложить полученные линии положения на карте. Тогда для определения места судна, если оно в период наблюдений шло равномерно и прямолинейно, достаточно вместить между линиями положения отрезки пути, пройденные судном по прямой, так, чтобы они относились как соответствующие промежутки времени или пройденные судном расстояния по лагу (рис. 11.12): ри отсутствии обсерваций, чтобы исключить ошибки счисления при определении места судна по разновременным линиям положения, необходимо произвести четыре наблюдения и проложить полученные линии положения на карте. Тогда для определения места судна, если оно в период наблюдений шло равномерно и прямолинейно, достаточно вместить между линиями положения отрезки пути, пройденные судном по прямой, так, чтобы они относились как соответствующие промежутки времени или пройденные судном расстояния по лагу (рис. 11.12):Чтобы выполнить это, на кальке проводим произвольную прямую и на ней откладываем отрезки Sл1, S л2 и Sл3 (рис. 11.13). Можно отложить любые отрезки, пропорциональные промежуткам времени t1 t2 и t3. Через полученные на прямой точки m,n,f,h и произвольно выбранную точку О проводим четыре луча ОМ, ON, OF и ОН, а вблизи линии mnfh — серию параллельных прямых. Наложив кальку на карту и двигая ее, можно найти такое положение, когда все четыре точки одной из прямых, параллельных линии mnfh, будут лежать на соответствующих линиях положения и одновременно на лучах ОМ, ON, OF и ОН. Место судна на любой из линий положения на соответствующий момент помечаем уколом циркуля. П 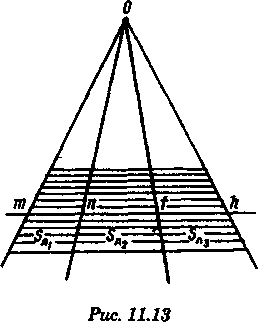 оказать, что вмещение выполнялось правильно, можно, вспомнив теорему об отрезках параллельных линий, пересекающих пучок прямых. Число прямых параллельных линии mnfh, которые нужно провести, определяется требуемой точностью построения, и предполагаемыми расхождениями в значениях Sл и S, проходимых судном за одинаковые промежутки времени. оказать, что вмещение выполнялось правильно, можно, вспомнив теорему об отрезках параллельных линий, пересекающих пучок прямых. Число прямых параллельных линии mnfh, которые нужно провести, определяется требуемой точностью построения, и предполагаемыми расхождениями в значениях Sл и S, проходимых судном за одинаковые промежутки времени.Из построения понятно, что метод вмещения не зависит от вида линий положения и от того, по наблюдениям одних и тех же или различных ориентиров они были получены. Следует лишь иметь в виду, что по четырем пеленгам и четырем расстояниям до одного ориентира или при параллельности всех четырех линий решение задачи становится неопределенным. Если для определения использовано несколько ориентиров, задача решается всегда. В отдельных случаях может иметь место неопределенность, когда решений будет несколько, но выбрать из нескольких решений правильное обычно не представляется трудным, учитывая дополнительную информацию (глубины, счисление, гидрометеорологические данные). Изложенный метод вмещения может быть применен и к определению места способами крюйс-пеленга и крюйс-расстояния, для этого первую линию положения следует провести через точку F — исходную обсервацию, а пеленги и расстояния измерять до различных ориентиров. Впервые эта задача для четырех прямых была графически решена англичанином Ревом, графоаналитически — академиком А. Н. Крыловым и М. Н. Андреевым. Приведенное выше графическое решение предложено проф. М. М. Лесковым, оно является наиболее простым. Определение места судна по пеленгу и расстоянию Определение места судна по пеленгу и расстоянию — способ, наиболее часто употребляемый при использовании радиолокатора Обычно пеленг и расстояние измеряют до одного ориентира, однако бывает целесообразнее измерить пеленг на светящийся маяк по компасу, а расстояние измерить до берега В первом случае угол пересечения линий положения будет равен 90°, а во-втором — разности пеленгов, снятых с карты. Расстояние может быть измерено с помощью секстана по вертикальному углу либо получено приближенно по открытию маяка или глазомерно, при плавании по фарватеру или в узкостях. Чтобы уменьшить ошибки неодновременности наблюдений, вначале измеряется расстояние, а затем берется пеленг при положении предмета ближе к траверзу и в обратной последовательности — при острых курсовых углах. Обсервованное место получается на линии ИП на расстоянии от предмета, равном D. Известно, что ошибки линии положения пеленга и расстояния П При измерении пеленга и расстояния до разных объектов требуется знать угол пересечения. Тогда Из формул (12.1) и (12.2) видно, что с увеличением расстояния точность определения понижается. Поэтому при выборе ориентиров следует отдавать предпочтение ближайшим из них. Кроме того, точность определения понижается с увеличением ошибок в измерении пеленга и расстояния. Способ имеет достоинство в том, что для определения места судна достаточно иметь в видимости один предмет. Этот способ хорошо использовать при плавании по створу. Недостаток способа в невозможности выявить промах в опознании ориентира и в измерениях. Другие комбинированные способы определения места судна В 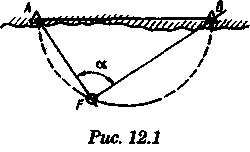 условиях морского плавания можно предположить создание условий, когда измерение двух навигационных параметров затруднительно. К таким условиям можно отнести выход из строя РЛС или гирокомпаса, невозможность пеленгования из-за закрытия объектов надстройкой или палубным грузом, малое количество объектов для пеленгования, штормовые условия или плохая видимость. Учитывая эти обстоятельства, штурман должен владеть различными комбинированными способами определения места судна условиях морского плавания можно предположить создание условий, когда измерение двух навигационных параметров затруднительно. К таким условиям можно отнести выход из строя РЛС или гирокомпаса, невозможность пеленгования из-за закрытия объектов надстройкой или палубным грузом, малое количество объектов для пеленгования, штормовые условия или плохая видимость. Учитывая эти обстоятельства, штурман должен владеть различными комбинированными способами определения места судна1. Определение по пеленгу и горизонтальному углу. Если предположить, что один из двух предметов закрыт для обзора, то, измерив пеленг одного предмета, можно секстаном измерить горизонтальный угол с другой точки на судне. Для получения места на карте прокладываем ИП предмета А (рис. 12.1) и затем пеленг предмета В, рассчитанный по формуле ИПВ = ИПА + α. Метод сводится к определению места по двум пеленгам. Е  сли необходимо, то наблюдения следует привести к одному моменту. Хотя измерение угла секстаном дает высокую точность, из-за неизбежных графических ошибок при прокладке этот способ можно считать для хорошей погоды приблизительно равноценным способу двух пеленгов. Если в пеленге большие случайные ошибки, то место судна, определенное по пеленгу и углу, оказывается более точным, особенно при малых углах между ориентирами, так как в этом случае угол между линиями положения будет близок к 90°. В частном случае вместо пеленга может быть створ. сли необходимо, то наблюдения следует привести к одному моменту. Хотя измерение угла секстаном дает высокую точность, из-за неизбежных графических ошибок при прокладке этот способ можно считать для хорошей погоды приблизительно равноценным способу двух пеленгов. Если в пеленге большие случайные ошибки, то место судна, определенное по пеленгу и углу, оказывается более точным, особенно при малых углах между ориентирами, так как в этом случае угол между линиями положения будет близок к 90°. В частном случае вместо пеленга может быть створ.Для оценки точности данного способа может быть применена формула |