Вопросы к экзамену Устройство и принцип действия трансформатора. Классификация трансформаторов
 Скачать 0.88 Mb. Скачать 0.88 Mb.
|

Часть дуги внетренней расторочки статора приходящаяся на один полюс называется полюсным делением  или или  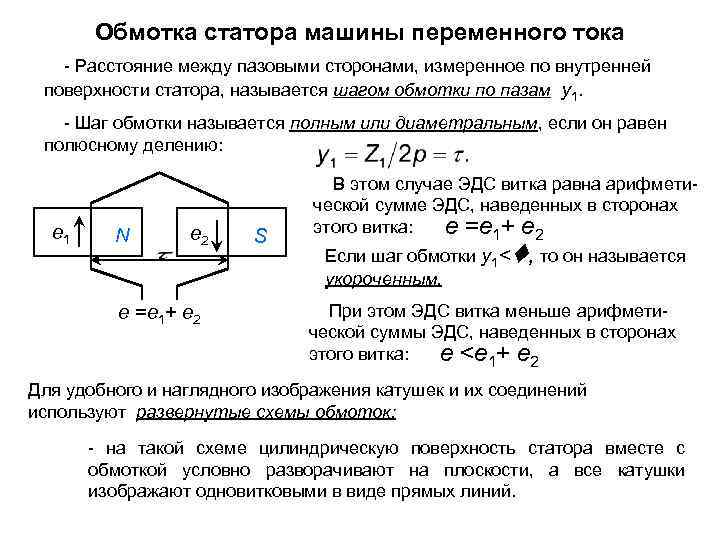 O конструкции катушек обмотки подразделяют на всыпные с мягкими катушками и обмотки с жесткими катушками или полукатушками. 16. Назначение и область применения асинхронных машин. 17. Устройство ротора асинхронной машины. 18. Двигательный режим работы асинхронной машины, скольжение, перегрузочная способность. 19. Генераторный режим работы асинхронной машины, достоинства, недостатки. Если ротор асинхронной машины, включенной в сеть с напряжением U1, вращать посредством первичного двигателя в направлении вращающегося поля статора, но со скоростью n2>n1, то движение ротора относительно поля статора изменится (по сравнению с двигательным режимом этой машины), так как ротор будет обгонять поле статора. При этом скольжение станет отрицательным, а направление э.д.с. Е1, наведенной в обмотке статора, а следовательно, и направление тока I1 изменятся на противоположное. В результате электромагнитный момент на роторе также изменит направление и из вращающего (в двигательном режиме) превратится в противодействующий (по отношению к вращающему моменту первичного двигателя). В этих условиях асинхронная машина из двигательного перейдет в генераторный режим, преобразуя механическую энергию первичного двигателя в электрическую. При генераторном режиме асинхронной машины скольжение может изменяться в диапазоне: − ∞ < s < 0 В следствии того, что в режиме генератора электрической машины, условия создания вращающегося поля статора будут такими же, что и в двигательном режиме, и потребление намагничивающего тока I0 происходит от сети, то электрическая машина в генераторном режиме будет обладать следуюими свойствами: она потребляет реактивную энергию из сети, необходимую для создания вращающегося поля статора, но отдает в сеть активную энергию, получаемую в результате преобразования механической энергии первичного двигателя. Плюсом является то, что в отличие от синхронных генераторов, асинхронные не подвержены опасностям выпадения из синхронизма. Работа асинхронных генераторов возможна лишь при их совместной работе с синхронными генераторами, которые в этом случае необходимы как источники реактивной энергии. Так же одним из существенных недостатков является значительная реактивная мощность, потребляемая асинхронными генераторами из сети. Величина этой мощности пропорциональна намагничивающему току I0 и может достигать 25-45% от номинальной мощности машины. Из этого следует, что для работы 3-4 асинхронных генераторов необходимо использовать один синхронный генератор такой же мощности, что и мощность одного асинхронного генератора. Если же асинхронные генераторы работают параллельно на общую сеть с несколькими синхронными генераторами, то большая величина реактивной мощности возбуждения асинхронных генераторов значительно понизит коэффициент мощности всей электрической сети. 20. Режим торможения противовключением AM, применение, достоинства, недостатки Рекуперативное торможение асинхронного двигателя Режим рекуперативного торможения осуществляется в том случае, когда скорость ротора асинхронного двигателя превышает синхронную. Режим рекуперативного торможения практически применяется для двигателей с переключением полюсов и в приводах грузоподъемных машин (подъемники, экскаваторы и т.п.). При переходе в генераторный режим вследствие изменения знака момента меняет знак активная составляющая тока ротора. В этом случае асинхронный двигатель отдает активную мощность (энергию) в сеть и потребляет из сети реактивную мощность (энергию), необходимую для возбуждения. Такой режим возникает, например, при торможении (переходе) двухскоростного двигателя с высокой на низкую скорость, как показано на рис. 1 а. 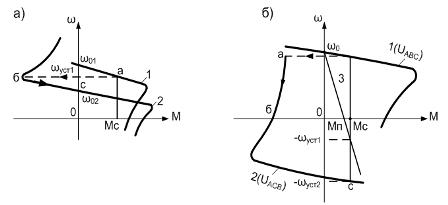 Рис. 1. Торможение асинхронного двигателя в основной схеме включения: а) с рекуперацией энергии в сеть; б) противовключением Предположим, что в исходном положении двигатель работал на характеристике 1 и в точке а, вращаясь со скоростью ωуст1. При увеличении числа пар полюсов двигатель переходит на характеристику 2, участок бс которой соответствует торможению с рекуперацией энергии в сеть. Этот же вид торможения может быть реализован в системе преобразователь частоты – двигатель при останове асинхронного двигателя или при переходе с характеристики на характеристику. Для этого осуществляется уменьшение частоты выходного напряжения, а тем самым синхронной скорости ωо = 2πf / p. В силу механической инерции текущая скорость двигателя ω будет изменяться медленнее чем синхронная скорость ωо, и будет постоянно превышать скорость магнитного поля. За счет этого и возникает режим торможения с отдачей энергии в сеть. Рекуперативное торможение также может быть реализовано в электроприводе грузоподъемных машин при спуске грузов. Для этого двигатель включается в направлении спуска груза (характеристика 2 рис. 1 б). После окончания торможения он будет работать в точке со скоростью –ωуст2. При этом осуществляется процесс спуска груза с отдачей энергии в сеть. Рекуперативное торможение является наиболее экономичным видом торможения. Торможение асинхронного электродвигателя противовключением Перевод асинхронного двигателя в режим торможения противовключением может быть выполнен двумя путями. Один из них связан с изменением чередования двух фаз питающего электродвигатель напряжения. Допустим, что двигатель работает на характеристике 1 (рис. 1 б) при чередовании фаз напряжения АВС. Тогда при переключении двух фаз (например, В и С) он переходит на характеристику 2, участок аб которой соответствует торможению противовключением. Обратим внимание на то обстоятельство, что при противовключении скольжение асинхронного двигателя изменяется от S = 2 до S = 1. Ротор при этом вращается против направления движения поля и постоянно замедляется. Когда скорость спадает до нуля, двигатель должен быть отключен от сети, иначе он может перейти в двигательный режим, причем ротор его будет вращаться в направлении, обратном предыдущему. При торможении противовключением токи в обмотке двигателя могут в 7–8 раз превышать соответствующие номинальные токи. Заметно уменьшается коэффициент мощности двигателя. О КПД в данном случае говорить не приходится, т.к. и преобразуемая в электрическую механическая энергия и энергия, потребляемая из сети, рассеиваются в активном сопротивлении ротора, и полезно используемой энергии в данном случае нет. Короткозамкнутые двигатели кратковременно перегружаются по току. Правда, у них при (S > 1) вследствие явления вытеснения тока заметно возрастает активное сопротивление ротора. Это приводит к уменьшению и увеличению момента. С целью увеличения эффективности торможения двигателей с фазным ротором в цепи их роторов вводят добавочные сопротивления, что позволяет ограничить токи в обмотках и увеличить момент. Другой путь торможения противовключением может быть использован при активном характере момента нагрузки, который создается, например, на валу двигателя грузоподъемного механизма. Допустим, что требуется осуществить спуск груза, обеспечивая его торможение с помощью асинхронного двигателя. Для этого двигатель путем включения в цепь ротора добавочного резистора (сопротивления) переводится на искусственную характеристику (прямая 3 на рис. 1). Вследствие превышения моментом нагрузки Мс пускового момента Мп двигателя и его активного характера груз может опускаться с установившейся скоростью –ωуст2. В этом режиме торможение скольжения асинхронного двигателя может изменяться от S = 1 до S = 2. Динамическое торможение асинхронного двигателя Для динамического торможения обмотки статора двигатель отключают от сети переменного тока и подключают к источнику постоянного тока, как это показано на рис. 2. Обмотка ротора при этом может быть закорочена, или в ее цепь включаются добавочные резисторы с сопротивлением R2д. 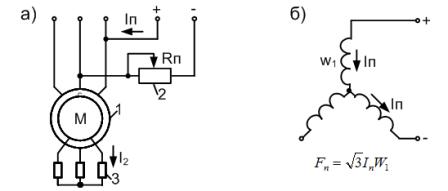 Рис. 2. Схема динамического торможения асинхронного двигателя (а) и схема включения обмоток статора (б) Постоянный ток Iп, значение которого может регулироваться резистором 2, протекает по обмоткам статора и создает относительно статора неподвижное магнитное поле. При вращении ротора в нем наводится ЭДС, частота которой пропорциональна скорости. Эта ЭДС, в свою очередь, вызывает появление тока в замкнутом контуре обмотки ротора, который создает магнитный поток, также неподвижный относительно статора. Взаимодействие тока ротора с результирующим магнитным полем асинхронного двигателя создает тормозной момент, за счет которого достигается эффект торможения. Двигатель в этом случае работает в режиме генератора независимо от сети переменного тока, преобразовывая кинетическую энергию движущихся частей электропривода и рабочей машины в электрическую, которая рассеивается в виде тепла в цепи ротора. На рисунке 2 б показана наиболее распространенная схема включения обмоток статора при динамическом торможении. Система возбуждения двигателя в этом режиме является несимметричной. Для проведения анализа работы асинхронного двигателя в режиме динамического торможения несимметричную систему возбуждения заменяют симметричной. С этой целью принимается допущение, что статор питается не постоянным током Iп, а некоторым эквивалентным трехфазным переменным током, создающим такую же МДС (магнитодвижущую силу), что и постоянный ток. Электромеханическая и механические характеристики представлены на рис. 3. 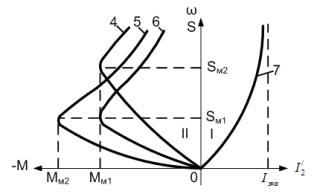 Рис. 3. Электромеханическая и механические характеристики асинхронного двигателя Характеристика расположена на рисунке в первом квадранте I, где s = ω / ωo – скольжение асинхронного двигателя в режиме динамического торможения. Механические характеристики двигателя расположены во втором квадранте II. Различные искусственные характеристики асинхронного двигателя в режиме динамического торможения можно получить, изменяя сопротивление R2д добавочных резисторов 3 (рис. 2) в цепи ротора или постоянный ток Iп, подаваемый в обмотки статора. Варьируя значения R2д и Iп, можно получить желаемый вид механических характеристик асинхронного двигателя в режиме динамического торможения и, тем самым, соответствующую интенсивность торможения асинхронного электропривода. 21. Чистота тока и ЭДС обмотки ротора асинхронной машины. 22. Уравнения ЭДС асинхронного двигателя. При подключении обмотки статора к сети возникают токи I1, создающие вращающийся магнитный поток Ф. Большая часть магнитного потока сцепляется с обмотками ротора и статора. Это будет основной поток обмотки статора. Некоторая часть магнитного потока рассеивается в пространстве. Назовем его потоком рассеяния Фрс. Он cцепляется только с витками собственной обмотки. Основной магнитный поток асинхронного двигателя, вращаясь в пространстве, пересекает обмотку статора со скоростью n1 и обмотку ротора со скоростью n2, наводя в них основные ЭДС: где W1k1 и W2k2 - произведения чисел витков на обмоточные коэффициенты; Е2s=Е2S. Потоки рассеяния Фрс1 Фрс2 наводят в обмотках ЭДС рассеяния Ер1 и Ер2, которые, как в трансформаторе, могут быть выражены через соответствующие токи I1 и I2 и индуктивные сопротивления х1 и х2s. где х1 и х2s - индуктивные сопротивления рассеяния обмоток статора и ротора. Помимо названных выше ЭДС, в обмотках статора и ротора имеют место активные падения напряжения, которые компенсируются соответствующими ЭДС Er1 и Еr2. 23.Уравнения МДС асинхронного двигателя. Основной магнитный поток Ф в асинхронном двигателя создается совместным действием МДС обмоток статора F1 и ротора F2:  (3.13) (3.13)где RM— магнитное сопротивление магнитной цепи двигателя потоку Ф; F0— результирующая МДС двигателя, численно равная МДС обмотки статора в режиме ХХ:  (3.14) (3.14)I0 — ток ХХ в обмотке статора, А. МДС обмоток статора и ротора на один полюс в режиме нагруженного двигателя  ; (3.15) ; (3.15)где m2— число фаз в обмотке ротора; kоб2— обмоточный коэффициент обмотки ротора. При изменениях нагрузки на валу двигателя меняются токи в статоре I1 и роторе I2. Но основной магнитный поток Ф при этом сохраняется неизменным, так как напряжение, подведенное к обмотке статора, неизменно (U1 = const) и почти полностью уравновешивается ЭДС Е1обмотки статора [см. (3.7)]: Так как ЭДС Е1пропорциональна основному магнитному потоку Ф (Е1=4,44f1Фw1kоб1), то последний при изменениях нагрузки остается неизменным. Этим и объясняется то, что, несмотря на изменения МДС F1 и F2, результирующая МДС остается неизменной, т. е. Подставив вместо F0, F1и F2их значения по (3.14) и (3.15), получим  Разделив это равенство на  , определим уравнение токов асинхронного двигателя: , определим уравнение токов асинхронного двигателя: (3.17) (3.17)где  (3.18) (3.18)- ток ротора, приведенный к обмотке статора. Преобразовав уравнение (3.17), получим уравнение токов статора асинхронного двигателя из которого следует, что ток статора в асинхронном двигателе Следовательно, ток ротора I2оказывает на магнитную систему двигателя такое же размагничивающее влияние, как и ток вторичной обмотки трансформатора. Таким образом, любое изменение механической нагрузки на валу двигателя сопровождается соответствующим изменением тока в обмотке статора I1, так как изменение этой нагрузки двигателя вызывает изменение скольжения s. Это, в свою очередь, влияет на ЭДС обмотки ротора [см. (3.10)], а следовательно, и на ток ротора I2. Но так как этот ток оказывает размагничивающее действие на магнитную систему двигателя, то его изменения вызывают соответствующие изменения тока в обмотке статора I1за счет составляющей Так, в режиме холостого хода, когда нагрузка на валу двигателя отсутствует и s≈0, ток I2≈0. В этом случае ток в обмотке статора 24. Потери и КПД асинхронных машин. Основные потери в стали (магнитные потери в ярме и зубцах сердечника статора от гистерезиса и вихревых токов, возникающие вследствие изменения основной гармонической потока) где   Примечание. Основными потерями в сердечнике ротора обычно за малостью пренебрегают. Механические потери а) Потери в подшипниках и вентиляционные. 1. Двигатели с радиальной вентиляцией: с радиальными каналами где τ — полюсное деление; без радиальных каналов где D — внутренний диаметр сердечника статора;  2. Двигатели с аксиальной вентиляцией (центробежный вентилятор) 3. Двигатели с внешним обдувом (центробежный вентилятор; где Примечание. При осевом вентиляторе потери, определенные в п. 2 и 3, должны быть уменьшены в 2 раза. б) Потери на трение щеток о контактные кольца где в) Полные механические потери Примечание. Сумму потерь Электрические потери в обмотках а) Основные электрические потери в обмотках статора и ротора: где б) Потери в переходных контактах щеток (в асинхронных машинах, не имеющих приспособления для подъема щеток и замыкания колец накоротко) где в) Полные электрические потери Добавочные потери где для двигателя Примечание. Сумму потерь Рэ+Рд часто называют потерями короткого замыкания. Номинальный к. п. д. асинхронной машины: к. п. д. двигателя: где к. п. д. генератора:  где Примечание. Под «номинальной мощностью» (Рн) обычно (если нет особых оговорок) понимают полезную мощность: для двигателя — мощность 25. Механическая характеристика асинхронного двигателя. Механическая характеристика асинхронного двигателя – зависимость скорости вращения двигателя от момента сопротивления на его валу при постоянном напряжении сети 1 U , то есть, 2( ( ) n f M , при 1Ф ) U const . Для построения механической характеристики асинхронного двигателя не используется аналитическая зависимость 2 n от M , а используются два выражения: зависимости ) (sM и ) 1(12 s nn . Тогда механическая характеристика будет иметь вид (рис. 36).  Рис. 36. Механическая характеристика асинхронного двигателя: Сплошная линия – механическая характеристика двигателя при номинальном напряжении, пунктирная – при пониженном напряжении. Замечание 1. Так как область устойчивой работы двигателя ограничивается областью О-Н-К, то в практических целях используют только эту часть характеристики, считая ее линейной (рис. 37). Рис. 37. Механическая характеристика устойчивой области работы АД Замечание 2. Так как max M пропорционален 2 1ФU , а значение кр s и кр 1 кр n (1 ) ns не зависят от этого напряжения, то механическая характе ристика двигателя при пониженном напряжении питания имеет вид, показанный на рисунке 36 пунктиром. Замечание 3. Для расчета момента эм M двигателя часто используют приближенную формулу (формулу Клосса): Рис. 38. Механические характеристики асинхронного двигателя, рассчитанные: 1 – по основной формуле (85) и 2 – по приближенной (87) Эта формула дает хорошее приближение к действительной характеристике асинхронного двигателя на участке его устойчивой работы. Участок неустойчивой работы существенно отличается от действительной характеристики (рис. 38). 26. Влияние напряжения сети на форму механической характеристики 27. Влияние сопротивления, включенного в цепь ротора, на форму механической характеристики асинхронного двигателя. 28. Способы пуска асинхронного двигателя. 29. Рабочие характеристики асинхронного двигателя. 30. Регулирование частоты вращения асинхронного двигателя. Регулирование частоты вращения путем изменения частоты в питающей сети считается одним из самых экономичных способов регулирования, который позволяет добиться отличных механических характеристик электропривода. Когда происходит изменение частоты питающей сети, частота вращения магнитного поля также меняется. Преобразование стандартной частоты сети, которая составляет 50 Гц, происходит за счет источника питания. Одновременно с изменением частоты происходит и изменение напряжения, которое необходимо для обеспечения высокой жесткости механических характеристик. Регулирование частоты вращения позволяет добиться различных режимов работы электродвигателя: с постоянным вращающим моментом; с моментом, который пропорционален квадрату частоты; с постоянной мощностью на валу. В качестве источника питания для регулирования могут использоваться электромашинные вращающиеся преобразователи, а также статические преобразователи частоты, которые работают на полупроводниковых приборах, серийно выпускающихся промышленностью. Несомненным преимуществом частотного регулирования является наличие возможности плавно регулировать частоту вращения в обе стороны от естественной характеристики. При регулировании достигается высокая жесткость характеристик и отличная перегрузочная способность. Регулирование частоты вращения путем изменения числа полюсов происходит за счет изменения частоты вращения магнитного поля статора. Частота питающей сети остается неизменной, в то время как происходит изменение частоты вращения магнитного поля и частоты вращения ротора. Они меняются обратно пропорционально числу полюсов. Например, число полюсов равно 2, 4, 6, 8, тогда обороты двигателя при изменении их количества будут составлять 3000, 1500, 1000, 750 оборотов в минуту. Двигатели, которые обеспечивают переключение числа пар полюсов, имеют обычно короткозамкнутый ротор с обмоткой. Благодаря этому ротору обеспечивается возможность работы двигателя без дополнительных пересоединений в цепи. Изменение частоты вращения включением в цепь ротора с реостатом Еще одним способом изменения частоты вращения двигателя является включение в цепь ротора с реостатом. Такой метод имеет существенное ограничение, так как может быть применен только для двигателей с фазным ротором. Он обеспечивает плавное изменение частоты вращения в очень широких пределах. Минусом же являются большие потери энергии в регулировочном реостате. 31. Принцип действия однофазного асинхронного двигателя. Обмотки статора при помощи переменного тока образуют магнитные поля. Они имеют одинаковую амплитуду и частоту, но действуют в разных направлениях, поэтому статический ротор начинает вращаться. Если в двигателе отсутствует пусковой механизм, ротор останавливается, потому что результирующий крутящий момент равен нулю. В случае, когда ротор начинает вращаться в одном направлении, соответствующий крутящий момент становится выше, когда вал двигателя продолжает вращаться в заданном направлении. Сигналом к запуску становится магнитное поле двух обмоток, вращающее подвижную часть двигателя. Оно создается 2 обмотками: главной и пусковой. Дополнительная обмотка меньшего размера является пусковой и подключается к основной схеме включения однофазного двигателя через ёмкостное или индуктивное сопротивление. Пусковая обмотка может работать кратковременно. Более длительное время нахождения под нагрузкой может вызвать перегревание и воспламенение изолирующих элементов, что приведет к выходу из строя. Надежность повышается за счет встраивания в схему однофазного асинхронного двигателя таких элементов как тепловое реле и центробежный выключатель. Последний отключает пусковую фазу в тот момент, когда ротор разгоняется до номинальной скорости. Отключение происходит автоматически. Работа реле происходит следующим образом: когда обмотки нагреваются до предельного значения, установленного на реле, механизм прерывает подачу питания на обе фазы, предотвращая отказ из-за перегрузки или по любой другой причине. Это защищает от возгорания 32. Конденсаторный асинхронный двигатель. Конденсаторный двигатель или конденсаторный асинхронный электродвигатель - двухфазный асинхронный электродвигатель одна фаза которого постоянно подключена к сети переменного тока через конденсатор. Конденсаторный двигатель - двигатель с расщепленной фазой, у которого в цепь вспомогательной обмотки постоянно включен конденсатор. Конденсаторный двигатель, хотя и питается от однофазной сети, по существу является двухфазным. Ёмкостной сдвиг фаз с рабочим конденсатором  Ёмкостной сдвиг фаз с пусковым и рабочим конденсатором  Конструктивно конденсаторный асинхронный двигатель представляет из себя двухфазный двигатель. На статоре располагают две обмотки фаз, оси которых смещены относительно друг друга на 90 электрических градусов. Обе обмотки занимают равное число пазов. Питание электродвигателя осуществляется от однофазной сети переменного тока, при этом одна обмотка подключается непосредственно к сети, а другая через конденсатор. Таким образом, в отличии от однофазного двигателя, который после пуска работает с пульсирующим магнитным потоком, конденсаторный электродвигатель работает с вращающимся магнитным потоком. Емкость рабочего конденсатора, требуемая для получения кругового вращающегося поля.  33. Назначение и области применения синхронных машин. Синхронные машины могут работать как генераторами, так и электродвигателями. Основная область применения синхронных машин — энергетика, где они используются в качестве генераторов электрической энергии. В зависимости от типа привода синхронные генераторы делятся на турбогенераторы, гидрогенераторы и дизельные генераторы. Турбогенератор, например, — это генератор, приводимый в движение паровой турбиной, гидрогенератор вращает водяное колесо, а дизельгенератор механически связан с двигателем внутреннего сгорания. Синхронные электродвигатели широко применяют для привода мощных компрессоров, насосов, вентиляторов. Синхронные микродвигатели используют для привода лентопротяжных механизмов регистрирующих приборов, магнитофонов и так далее 34. Устройство синхронных машин. Синхронной называется машина переменного тока, ротор которой вращается с частотой, равной частоте вращения магнитного поля статора. Частота вращения синхронной машины в установившемся режиме не зависит от ее нагрузки и определяется частотой тока сети ƒ числом пар полюсов р машины: n = 60ƒ/р. Синхронные машины выпускаются с двумя типами роторов: явнополюсными и неявнополюсными.  Рис. 84. Синхронная машина: 1 — сердечник статора; 2 — обмотка статора; 3 — полюс ротора; 4 — контактные кольца; 5 — подшипниковый щит; 6 — подшипник (корпус); 7 — вал; 8 — станина. В станину синхронной машины с явнополюсным ротором запрессован сердечник 1 статора, в пазах которого уложена трехфазная обмотка 2 (рис. 84). В расточке сердечника статора размещен ротор. На валу явнополюсного ротора укреплены полюса 3 с обмотками возбуждения. Питание к обмоткам возбуждения подводится с помощью щеток и колец 4, изолированных от вала и друг от друга. Вал 7 опирается на подшипники 6, расположенные в подшипниковых щитах 5. Явнополюсные роторы применяют при сравнительно невысоких частотах вращения синхронных машин (до 1500 об/мин) (рис. 85, а). Станина 13 имеет цилиндрическую форму и изготовляется литьем из серого чугуна, силумина. Внутри станина имеет продольные ребра 14, между которыми запрессован с помощью нажимных колец 10, пальцев 11 и шпилек 15 сердечник статора 12. Сердечник статора изготовляют шихтовкой листов, штампованных из электротехнической стали толщиной 0,5 мм. Внешняя окружность листов имеет выступы или впадины для фиксации их в ребрах станины при сборке. По внутренней окружности заготовок сердечников равномерно предусмотрены пазы, в которых располагают активные проводники обмотки 9 статора. При сборке сердечника между пакетами 12 прокладывают листы с приваренными дистанционными прокладками, образующими вентиляционные каналы.  Рис. 85. Устройство явнополюсного (а) и неявнополюсного (б) роторов: 1 — отвод обмотки возбуждения; 2 — пакет ярма ротора; 3 — вентиляционный канал; 4 — нажимная шека полюса: 5 — полюс; 6 — обмотка возбуждения; 7 — замыкающее кольцо успокоительной обмотки; 8 — стержень успокоительной обмотки; 9 — обмотка статора; 10 — нажимное кольцо статора; 11 — нажимной палец; 12 — пакет статора; 13 — станина; 14 — ребро-клин; 15 — шпилька; 16 — корпус ротора; 17 — клин; 18 — хвостовик полюса ротора; 19 — паз ротора; 20 — стальные клинья; 21 — осевой охладительный канал; 22 — бандаж; 23 - центрирующее кольцо; 24 — контактные кольца; 25 — бочка ротора; 26 — большой зуб; 27 — осевой канал. 35. Принцип работы синхронного генератора. 36. Реакция якоря синхронного генератора. 37. Уравнение ЭДС синхронного генератора. 38. Характеристика синхронного генератора. 39. Принцип работы синхронного двигателя. 40. Пуск в ход синхронных двигателей. Пуск синхронного двигателя Синхронный двигатель не имеет начального пускового момента. Если его подключить к сети переменного тока, когда ротор неподвижен, а по обмотке возбуждения проходит постоянный ток, то за один период изменения тока, электромагнитный момент будет дважды изменять свое направление, т.е. средний момент за период равняется нулю. При этих условиях двигатель не сможет прийти во вращение, т.к. его ротор обладающий определенной инерцией, не может быть в течении одного полупериода разогнан до синхронной частоты вращения. Следовательно, для пуска синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронной. В виду отсутствия пускового момента в синхронном двигателе для пуска его используют следующие способы: 1. Пуск с помощью вспомогательного двигателя. 2. Асинхронный пуск двигателя. Пуск с помощью вспомогательного двигателя.Пуск в ход синхронного двигателя с помощью вспомогательного двигателя может быть произведен только без механической нагрузки на его валу, т.е. практически вхолостую. В этом случае на период пуска двигатель временно превращается в синхронный генератор, ротор которого приводится во вращение небольшим вспомогательным двигателем. Статор этого генератора включается параллельно в сеть с соблюдением всех необходимых условий этого соединения. После включения статора в сеть вспомогательный приводной двигатель механически отключается. Этот способ пуска сложен и имеет к тому же вспомогательный двигатель. Асинхронный пуск двигателя.Наиболее распространенным способом пуска синхронных двигателей является асинхронный пуск, при котором синхронный двигатель на время пуска превращается в асинхронный. Для возможности образования асинхронного пускового момента в пазах полюсных наконечников явнополюсного двигателя помещается пусковая короткозамкнутая обмотка. Эта обмотка состоит из латунных стержней, вставленных в пазы наконечников и соединяемых накоротко с обоих торцов медными кольцами. При пуске в ход двигателя обмотка статора включается в сеть переменного тока. Обмотка возбуждения (3) на период пуска замыкается на некоторое сопротивление Rг, рис. 45, ключ К находится в положении 2, сопротивление Rг = (8-10)Rв. В начальный момент пуска при S=1, из-за большого числа витков обмотки возбуждения, вращающее магнитное поле статора наведет в обмотке возбуждения ЭДС Ев, которая может достигнуть весьма большого значения и если при пуске не включить обмотку возбуждения на сопротивление Rг произойдет пробой изоляции.  Рис. 45 Рис. 46. Процесс пуска синхронного двигателя осуществляется в два этапа. При включении обмотки статора (1) в сеть в двигателе образуется вращающее поле, которое наведет в короткозамкнутой обмотке ротора (2) ЭДС. Под действием, которой будет протекать в стержнях ток. В результате взаимодействия вращающего магнитного поля с током в коротко замкнутой обмотке создается вращающий момент, как у асинхронного двигателя. За счет этого момента ротор разгоняется до скольжения близкого к нулю (S=0,05), рис. 46. На этом заканчивается первый этап. Чтобы ротор двигателя втянулся в синхронизм, необходимо создать в нем магнитное поле включением в обмотку возбуждения (3) постоянного тока (переключив ключ К в положение 1). Так как ротор разогнан до скорости близкой к синхронной, то относительная скорость поля статора и ротора небольшая. Полюса плавно будут находить друг на друга. И после ряда проскальзываний противоположные полюса притянутся, и ротор втянется в синхронизм. После чего ротор будет вращаться с синхронной скоростью, и частота вращения его будет постоянной, рис. 46. На этом заканчивается второй этап пуска. 41.Синхронные компенсаторы. Для создания магнитных полей в электротехнических устройствах энергосистем необходима реактивная мощность. Основными источниками реактивной мощности являются синхронные машины и конденсаторы. Конденсаторы дороже синхронных машин, имеют большие габариты и меньшую надежность, хотя и являются статическими устройствами. Источники реактивной мощности желательно иметь ближе к месту потребления реактивной мощности. Поэтому невыгодно использовать синхронные генераторы в качестве источников реактивной мощности, так как реактивные токи загружают линии электропередачи и синхронные генераторы. Целесообразно в качестве источников реактивной мощности использовать синхронные машины, работающие как источники или потребители реактивной мощности. Такие машины называются синхронными компенсаторами. Конструктивно синхронные компенсаторы выполняются так же, как синхронные генераторы. Отличие состоит в том, что они не имеют выходного конца вала. Мощность синхронных компенсаторов 10—345 МВ-А при напряжении 6,6— 15,75 кВ, частота вращения 750—1000 об/мин. Наиболее распространенное исполнение — горизонтальное с явнополюсным ротором. Так как вал не передает вращающего момента, он может иметь меньший диаметр, что дает возможность уменьшить размеры подшипников. Отсутствие выходного конца вала облегчает герметизацию машины, поэтому в синхронных компенсаторах широко применяется водородное охлаждение.   Рис. 4.59. Векторные диаграммы синхронного компенсатора Уравнения синхронного компенсатора отличаются от уравнений синхронного двигателя лишь тем, что в них Мс = 0 (если пренебречь механическими потерями). Векторные диаграммы синхронного компенсатора при не- довозбуждении и перевозбуждении показаны на рис. 4.59, а, б. Индуктивное сопротивление синхронного компенсатора хск можно принять равным х,/. U-образная характеристика синхронного компенсатора (рис. 4.60) не отличается от соответствующей характеристики синхронного двигателя при Ра = 0. Ток синхронного компенсатора имеет небольшую активную составляющую, которая идет на покрытие потерь в компенсаторе. Энергия, которая идет на покрытие механических потерь, потерь в стали и меди, забирается из сети. По отношению к поминальной мощности синхронного компенсатора активная мощность составляет не более 1 —2%. При недовозбуждении синхронный компенсатор по отношению к сети является индуктивностью, а при перевоз- буждении — емкостью. В случае снижения напряжения сети синхронный компенсатор при Ij= = const отдает в сеть большую реактивную мощность, чем при номинальном напряжении. При повышении напряжения сети выше номинального значения синхронный компенсатор уменьшает отдачу в сеть реактивной мощ-  Рис. 4.60. U-образная характеристика синхронного компенсатора при Uc = const пости. При автоматическом регулировании тока в обмотке возбуждения стабилизирующие свойства синхронного компенсатора улучшаются. Полная номинальная мощность синхронного компенсатора Она имеет место при работе компенсатора с перевозбуждением. Наибольшее значение мощности и тока в статоре при недовозбуждеиии имеет место при токе возбуждения, равном нулю, когда Е = 0. В этом случае из векторной диаграммы (см. рис. 4.59) и полная мощность при недовозбуждеиии Синхронные компенсаторы работают при угле нагрузки 0 « 0, и нет необходимости заботиться об их статической перегружаемое™. Так как в обмотках синхронного компенсатора протекают реактивные токи, которые не создают динамических усилий, крепление лобовых частей менее прочное, чем в турбогенераторах. Для снижения тока возбуждения синхронные компенсаторы обычно выполняются с несколько меньшими воздушными зазорами, чем синхронные двигатели, поэтому у синхронных компенсаторов Xj = 1,8^-2,5. Рациональное распределение реактивной мощности в сетях между синхронными компенсаторами, генераторами, конденсаторами и двигателями имеет важное технико-экономическое значение. 42. Устройство машины постоянного тока. 43. Принцип действия машин постоянного тока. 44. Обмотки якоря машин постоянного тока. 45. ЭДС обмотки якоря. Электромагнитный момент машин постоянного тока. 46. Реакция якоря в машинах постоянного тока. Под реакцией якоря понимают явление воздействия магнитного поля, создаваемого током якоря, на магнитное поле главных полюсов. При холостом ходе генератора магнитное поле машины образовано только главными полюсами (рис.а). Оно симметрично относительно оси полюсов и его ось совпадает с осью полюсов. Когда генератор работает с нагрузкой, по обмотке якоря протекает ток, который создает свое магнитное поле (рис.б), называемое полем якоря. Ось магнитного поля якоря совпадает с линией, соединяющей щетки, т.е. с геометрической нейтралью, и перпендикулярна оси главных полюсов. При вращении якоря распределение тока в проводниках якоря остается неизменным и поле якоря — неподвижным в пространстве. Индукция этого поля пропорциональна току в якоре. При работе генератора с нагрузкой поле якоря накладывается на поле полюсов. В генераторе создаётся результирующее поле (рис.в), повернутое по направлению вращения якоря на некоторый угол у относительно поля главных полюсов. Физическая нейтральная линия, проходящая через центр якоря перпендикулярно силовым магнитным линиям оказывается повернутой на тот же угол y относительно геометрической нейтральной линии. При изменении нагрузки индукция поля якоря изменяется, изменяется и угол y.  47. Причины, вызывающие искрение на коллекторе в машинах постоянного тока. Причины, вызывающие искрение на коллекторе, разделяют на механические, потенциальные и коммутационные. Механические. слабое прижатие щеток к коллектору биение коллектора, его эллиптичность или негладкая поверхность загрязнение поверхности коллектора выступание миканитовой изоляции над медными пластинами |