качалка. Введение 6 1 Описание станкакачалки, технические характеристики 9
 Скачать 2.37 Mb. Скачать 2.37 Mb.
|

2.2 Предварительный выбор двигателя-преобразователя на основе данных и расчетова) Выбор мощности двигателя: Мощность двигателя должна быть больше мощности нагрузки. б) Выбор мощности преобразователя частоты. Мощность преобразователя частоты выбирается так, чтобы номинальный ток двигателя ( Дан асинхронный двигатель (таблица 2.1) с короткозамкнутым ротором типа 4А100L4У3, с моментом статической нагрузки Таблица 2.1 Технические данные двигателя 4А100L4У3
В силовую часть электропривода входят асинхронный двигатель с короткозамкнутым ротором и комплектный преобразователь частоты. Условием выбора преобразователя частоты является соответствие номинального напряжения и тока тиристорного преобразователя номинальным параметрам двигателя: Для питания двигателя выбран комплектный электропривод типа АТО4 5,5 (рисунок 2.1). Данный преобразователь является тиристорным электроприводом с автономным инвертором напряжения. [3] Параметры тиристорного преобразователя представлены в таблице 2.2. Таблица 2.2 Данные комплектного электропривода АТО4 5,5
Электропривод АТО4 5,5 предназначен для высокодинамичных электроприводов механизмов с высокими требованиями к регулированию параметров при четырехквадрантном управлении. Силовой канал ВФСАИН осуществляет двухступенчатое преобразование электрической энергии выпрямление сетевого напряжения с помощью нерегулируемого выпрямителя В и последующее инвертирование выпрямленного постоянного по величине напряжения посредством автономного инвертора напряжения АИН. Алгоритм ШИМ обеспечивает взаимосвязанное регулирование частоты F и величины U выходного напряжения по заданному закону, а также формирует синусоидальную форму кривой тока приводного АД. Для реализации режима динамического (реостатного) торможения в звено постоянного тока электропривода включён тормозной тиристорный (IGBT), ключ ТК и внешний блок тормозного резистора БТР. Датчики тока ДТ и напряжения ДН в силовом канале электропривода служат для контроля, регулирования и измерения электрических параметров электропривода, в т.ч. для защиты от токов перегрузки и короткого замыкания, недопустимых отклонений напряжения. 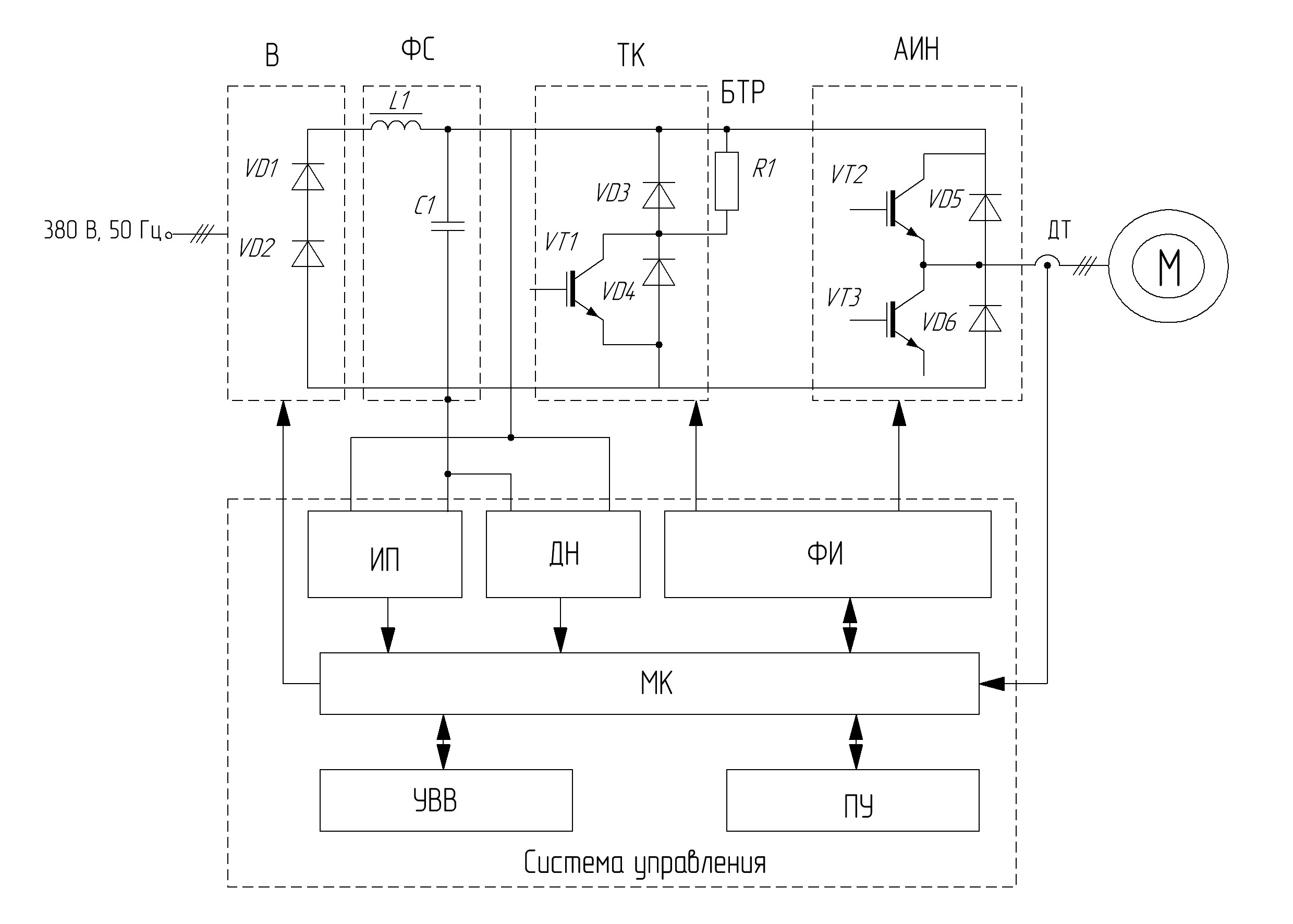 B – силовой полууправляемый выпрямитель ФС – силовой LC-фильтр звена постоянного напряжения; ТК – тиристорный ключ реостатного торможения (тормозной ключ); БТР – блок тормозного резистора. АД асинхронный электродвигатель; ИП источник питания (конвертор); ДН датчик напряжения; ФИ формирователь управляющих сигналов тиристоров (драйвер); МК микропроцессорный контроллер. Рисунок 2.1 - Комплектный электропривод АТО4 5,5 Многоканальный источник питания ИП преобразует сетевое переменное напряжение или выпрямленное напряжение звена постоянного тока в систему напряжений постоянного тока требуемых уровней и степени стабильности, гальванически связанных и не связанных между собой, для питания устройств управления. Микропроцессорный контроллер МК осуществляет формирование режимов работы электропривода с заданными параметрами с помощью сигналов управления: сигналов ШИМ – управления тиристорами АИН, сигналов защиты и аварийного отключения электропривода, приёма и передачи внешних управляющих, задающих и информационных сигналов. |