Вешкин_И_Н_КТсо-3-3_PID_Регулятор_исправленный. южный федеральный университет
 Скачать 154.51 Kb. Скачать 154.51 Kb.
|

|
Министерство образования и науки Российской Федерации Федеральное государственное автономное образовательное учреждение высшего профессионального образования «ЮЖНЫЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ» (ФГАОУ ВО «ЮФУ») Институт компьютерных технологий и информационной безопасности Кафедра систем автоматического управления ОТЧЁТ По дисциплине "SCADA системы - современные компьютерные технологии" "Проектирование системы управления инерционным объектом с транспортным запаздыванием с использованием ПИД-регулятора" Выполнил: студент группы КТсо3-3 ________________ И.Н. Вешкин Принял: Доцент кафедры САУ ________________ Т. А. Пьявченко Таганрог 2022 Цель работы: исследование замкнутой системы управления с использованием ПИ регулятора для объекта с транспортным запаздыванием. Задание: расчет ПИД-регулятора для обеспечения оптимального переходного процесса. Рассчитаем Крег с использованием среды Matlab.  Рисунок 1 – Вычисление Крег в среде Matlab Частоту среза вычислим графически. Она равна 0.00579. 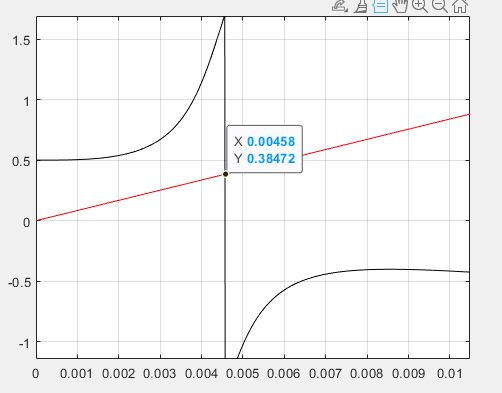 Рисунок 2 – Вычисление частоты среза в среде Matlab В результате расчетов Крег = 0.0782 Построим ПИД регулятор в среде Simulink.  Рисунок 3 – ПИД-регулятор в среде Simulink  Рисунок 4 – Результат моделирования ПИД-регулятора в среде Simulink Вывод: в результате проделанной работы получилось построить и промоделировать ПИД-регулятор в среде Simulink. При рассмотрении графика можно заметить, что требования для задания были выполнены: статическая ошибка нулевая, перерегулирование соответствует условию задания – и составляет 4,3%, что меньше 5%. Однако время переходного процесса составляет 398 секунд, что не соответствует условию задания. Для приближения к желаемому результату необходимо поднять коэффициент Крег. Однако при увеличении коэффициента время сильно не изменяется и не получается войти в требования по перерегулированию. 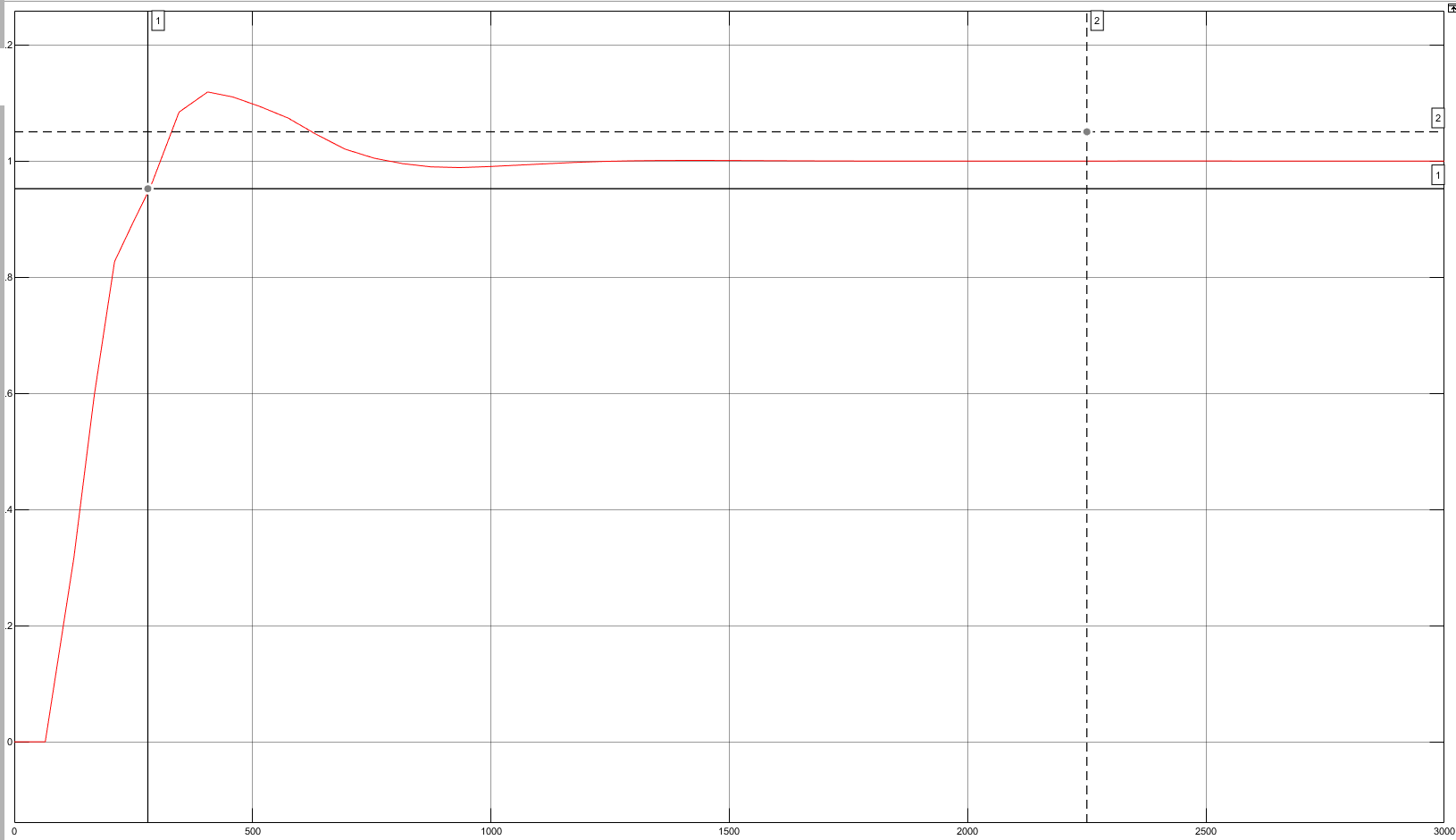 Рисунок 5 – Результат моделирования ПИД-регулятора в среде Simulink По результатам моделирования можно сказать, что для объекта с транспортным запаздыванием не всегда эффективен ПИД закон управления. Это связано с соотношением между постоянной времени ОУ Tоу и величиной запаздывания τзап. |