КР ТОАиТ Соколов. Забайкальский институт железнодорожного транспорта филиал федерального государственного бюджетного образовательного учреждения высшего образования Иркутский государственный университет путей сообщения
 Скачать 1.63 Mb. Скачать 1.63 Mb.
|

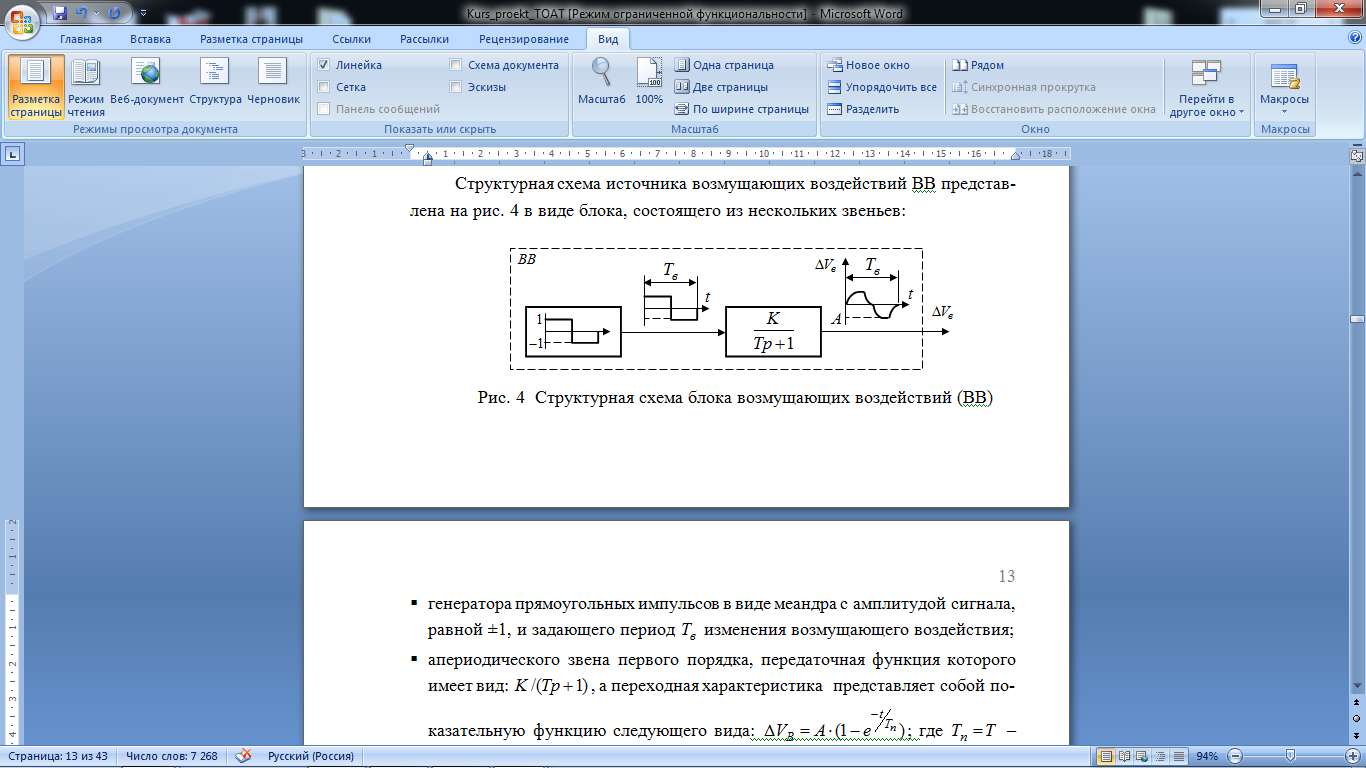 Рисунок 4 – Структурная схема блока возмущающих воздействий (ВВ) - генератора прямоугольных импульсов в виде меандра с амплитудой сигнала, равной ±1, и задающего период  изменения возмущающего воздействия; изменения возмущающего воздействия; - апериодического звена первого порядка, передаточная функция которого имеет вид:  , а переходная характеристика представляет собой показательную функцию следующего вида: ΔVв = А , а переходная характеристика представляет собой показательную функцию следующего вида: ΔVв = А  (1 - е-t/Tв ); где Tn = T – постоянная времени данного звена, характеризующая скорость изменения возмущающего воздействия. (1 - е-t/Tв ); где Tn = T – постоянная времени данного звена, характеризующая скорость изменения возмущающего воздействия.Значение коэффициента усиления  апериодического звена равно A и выбирается из табл. 1. Значение постоянной времени Tn не должно превышать Tn/6 и выбирается студентом произвольно. апериодического звена равно A и выбирается из табл. 1. Значение постоянной времени Tn не должно превышать Tn/6 и выбирается студентом произвольно.Два последовательных звена: чувствительный элемент ЧЭ и измерительное устройство ИУ можно представить в виде усилительного безинерционного звена с коэффициентом усиления K2, который по сути является коэффициентом усиления Koc цепи обратной связи между выходом и входом регулятора скорости. Так как регулируемый объект обладает инерционностью (для регулируемого изменения скорости требуется определенное время), то для ее учета в цепь обратной связи вводим апериодическое (инерционное) звено с постоянной времени  и коэффициентом усиления и коэффициентом усиления  . Структурная схема блока, замещающего цепь обратной связи представлена на рис. 5. . Структурная схема блока, замещающего цепь обратной связи представлена на рис. 5.На выходе блока имеем сигнал обратной связи  Значение постоянной времени  выбирается из табл. 1, а значение коэффициента усиления выбирается из табл. 1, а значение коэффициента усиления  определяется расчетом из уравнения динамики регулятора, методика составления которого приводится ниже. определяется расчетом из уравнения динамики регулятора, методика составления которого приводится ниже.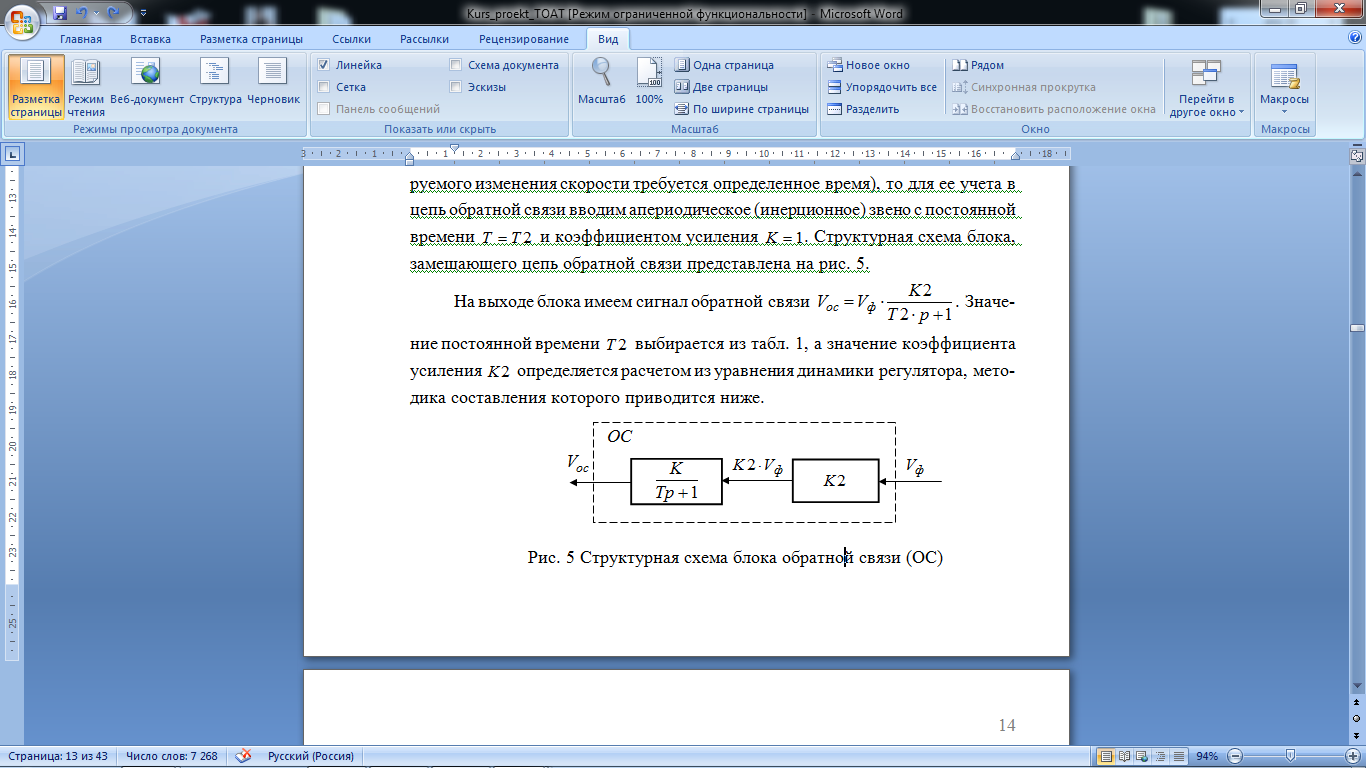 Рисунок 5 – Структурная схема блока обратной связи (ОС) Два последовательных звена: усилительно-преобразовательное УП и исполнительное ИСУ устройства представляем в виде инерционного звена с постоянной времени  и коэффициентом усиления и коэффициентом усиления  . Инерционное звено моделирует запаздывание исполнительного устройства. Значения переменных . Инерционное звено моделирует запаздывание исполнительного устройства. Значения переменных  и и  выбираются из табл.1. выбираются из табл.1.Задающее устройство ЗУ представляет собой блок генератора ступенчатой функции  , выходной сигнал которого поступает на один из входов блока сравнения УС, реализующего функцию вычитания (сравнения) двух сигналов. На другой вход устройства сравнения УС поступает сигнал , выходной сигнал которого поступает на один из входов блока сравнения УС, реализующего функцию вычитания (сравнения) двух сигналов. На другой вход устройства сравнения УС поступает сигнал  с выхода блока ОС. На рис. 6 представлена структурная схема системы автоматического регулирования скорости движущегося объекта для установившегося режима, на основе которой составляем математическую модель регулятора скорости, уточняем структурную схему САР и определяем неизвестные параметры вновь вводимых звеньев. с выхода блока ОС. На рис. 6 представлена структурная схема системы автоматического регулирования скорости движущегося объекта для установившегося режима, на основе которой составляем математическую модель регулятора скорости, уточняем структурную схему САР и определяем неизвестные параметры вновь вводимых звеньев.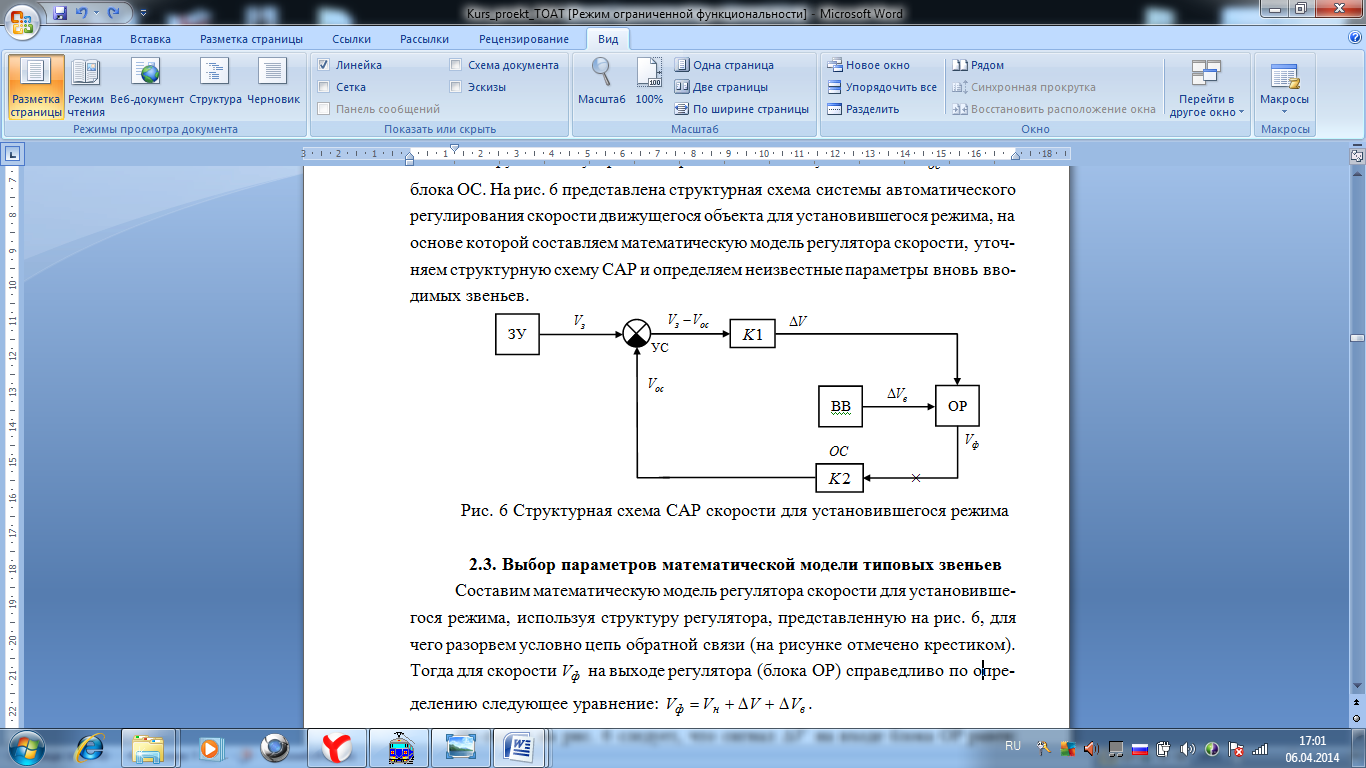 Рисунок 6 – Структурная схема САР скорости для установившегося режима Составим математическую модель регулятора скорости для установившегося режима, используя структуру регулятора, представленную на рис. 6, для чего разорвем условно цепь обратной связи (на рисунке отмечено крестиком). Тогда для скорости  на выходе регулятора (блока ОР) справедливо по определению следующее уравнение: на выходе регулятора (блока ОР) справедливо по определению следующее уравнение:  . .Из схемы на рис. 6 следует, что сигнал  на входе блока ОР равен: на входе блока ОР равен:  , где , где  . Подставляя выражение для в формулу для , получим: . Подставляя выражение для в формулу для , получим:  . В результате выражение для примет окончательный вид: . В результате выражение для примет окончательный вид:  . Последнее уравнение является математической моделью рассмотренного выше регулятора скорости и позволяет определить неизвестный параметр : . Последнее уравнение является математической моделью рассмотренного выше регулятора скорости и позволяет определить неизвестный параметр :   Очевидно, что в установившемся режиме должно выполняться равенство Vф=Vз. Исходя из этого, уравнение для определения параметра примет вид: Из приведенного выражения следует, что в схему регулятора требуется ввести дополнительные звенья, которые бы обеспечивали автоматическую перестройку коэффициента обратной связи в зависимости от текущих значений заданной и начальной скоростей, а также возмущающего воздействия, в соответствии с полученной формулой. На рис. 7 представлена соответствующая структурная схема блока автоматической настройки коэффициента обратной связи (блока ), содержащего следующие звенья: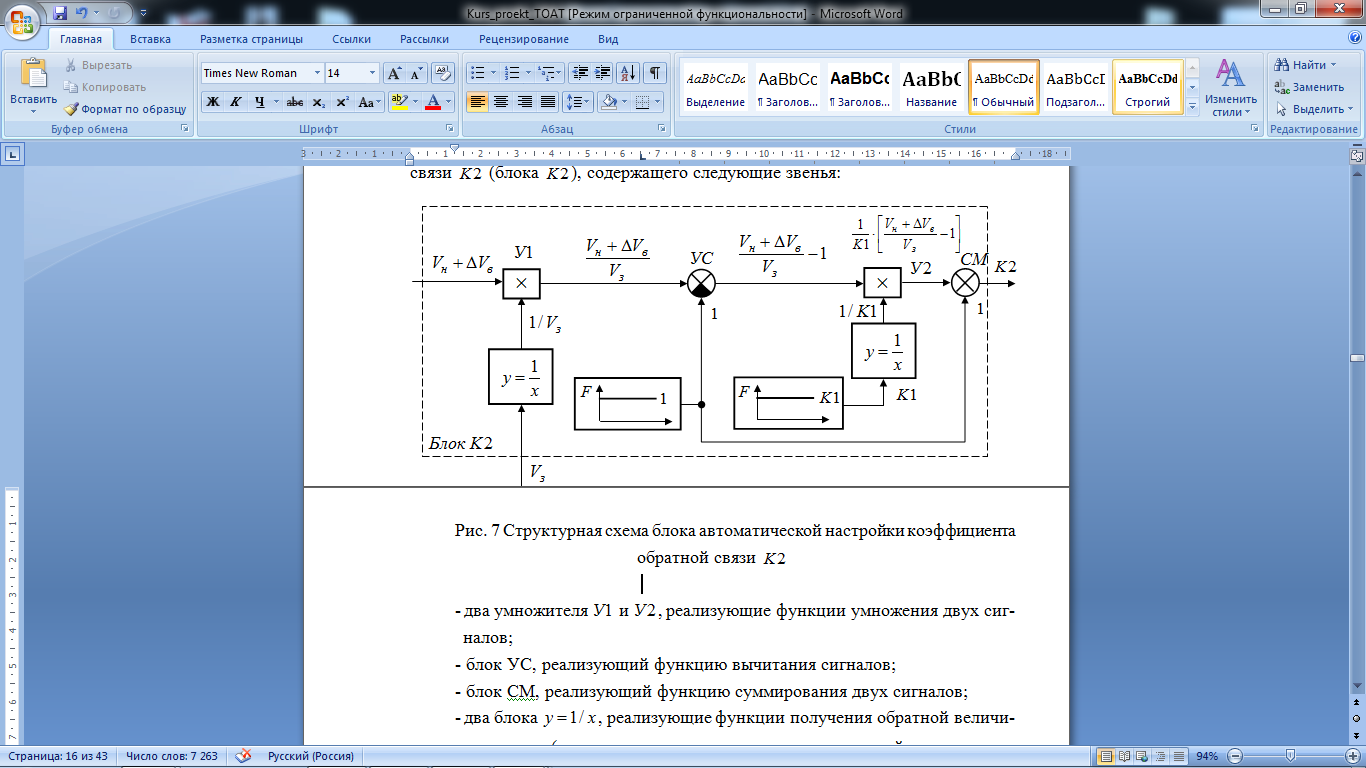 Рисунок 7 – Структурная схема блока автоматической настройки коэффициента обратной связи К2 - два умножителя  и и  , реализующие функции умножения двух сигналов; , реализующие функции умножения двух сигналов;- блок УС, реализующий функцию вычитания сигналов; - блок СМ, реализующий функцию суммирования двух сигналов; - два блока  , реализующие функции получения обратной величины сигнала (применены из-за отсутствия в компьютерной программе по моделированию устройств САУ делителей двух сигналов); , реализующие функции получения обратной величины сигнала (применены из-за отсутствия в компьютерной программе по моделированию устройств САУ делителей двух сигналов);- блок генератора ступенчатой функции  ; ;- блок генератора ступенчатой функции  . . Таким образом, состав и параметры звеньев структурной схемы регулятора скорости нами определены полностью, в том числе входные и выходные сигналы каждого звена. На основе структурных схем устройств и блоков, приведенных на рис.2–7, составить, используя лабораторную компьютерную программу по моделированию устройств САУ – SamSim, структурную схему системы автоматического регулирования скорости движущегося объекта. Ознакомление с принципами построения структурных схем САР и заданием параметров типовых звеньев с помощью компьютерной программы SamSim осуществляется в процессе выполнения практических и лабораторных работ. Краткое описание работы с данной программой SamSim приведено ниже. Изменяя значения постоянных времени и в соответствии с заданием получить графики изменения скорости и вывести их на печатающее устройство, также как и структурную схему разработанной САР скорости. Длительность времени моделирования должна задаваться равной не менее, чем трем периодам возмущающего воздействия  . .  ΔVв = А (1 - е-t/Tв ) ΔV = А (1 - е-t/2π ) 1.2 Исследование синтезированного регулятора скорости 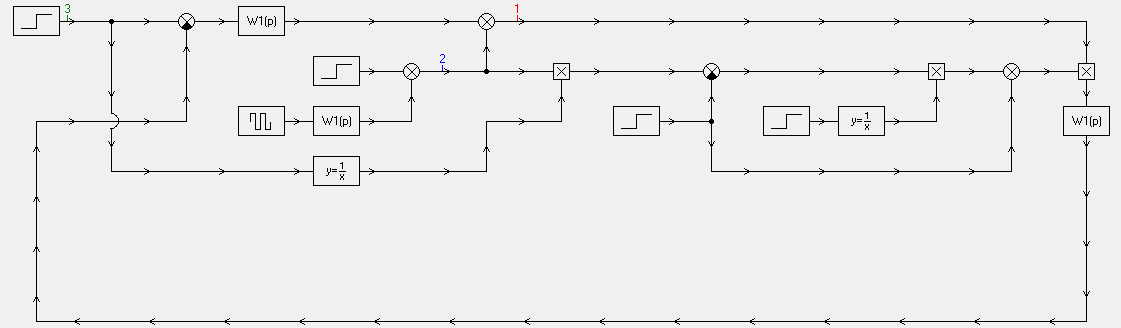 Рисунок 8 - Структурная схема системы автоматического регулирования скорости движущегося объекта 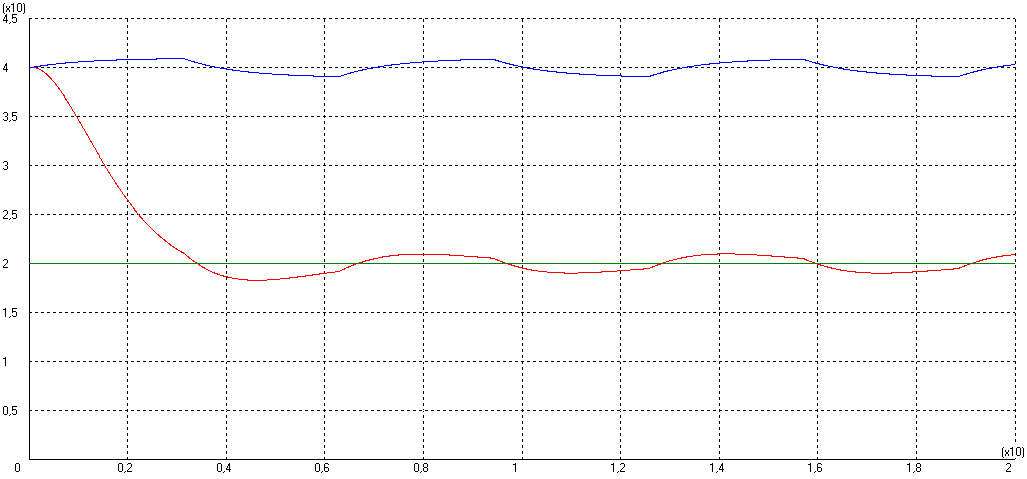 Рисунок 9 - График изменения скорости при Т1=1 с и Т2=2 с. Время перерегулирования tперег.=3,39 с. Система устойчива. Максимальная и минимальная скорости в установившемся режиме: vmax=20,9 км/ч; vmin=18,2 км/ч 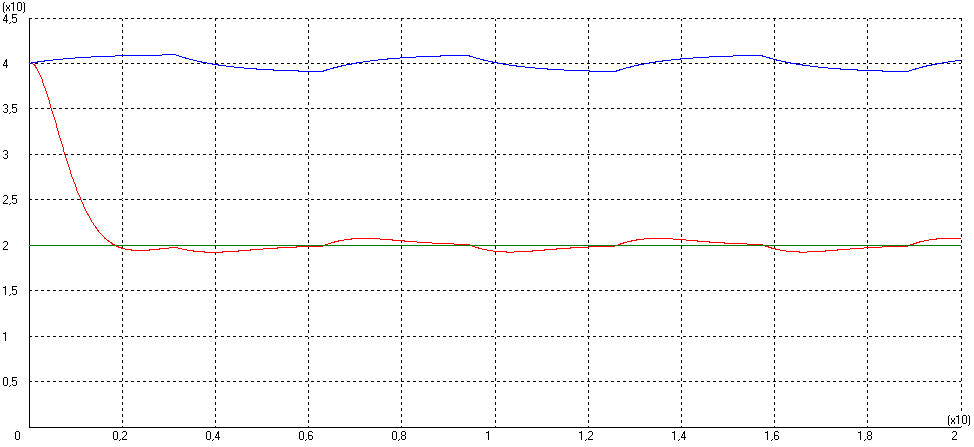 Рисунок 10 - График изменения скорости при Т1мин=0,5 с и Т2мин=1 с. Время перерегулирования tперег.=6,33 с. Система устойчива. Максимальная и минимальная скорости в установившемся режиме: vmax=20,7 км/ч; vmin=19,3 км/ч 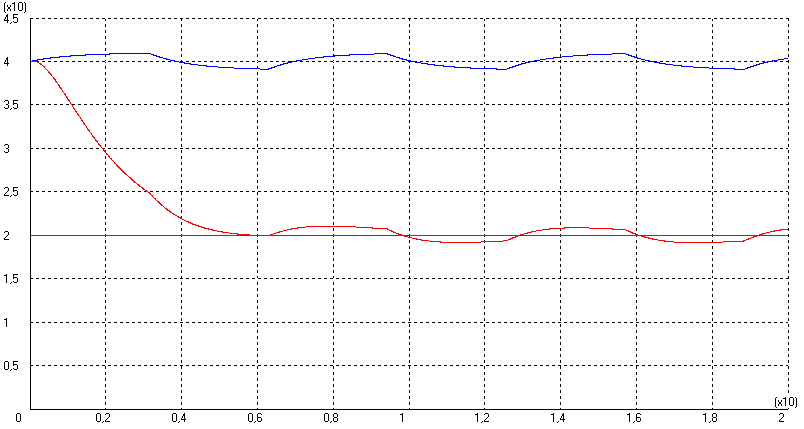 Рисунок 11 - График изменения скорости при Т1мин=0,5 с и Т2макс=4 с. Время перерегулирования tперег.=5,87с. Система устойчива. Максимальная и минимальная скорости в установившемся режиме: vmax=21,05 км/ч; vmin=19,1 км/ч 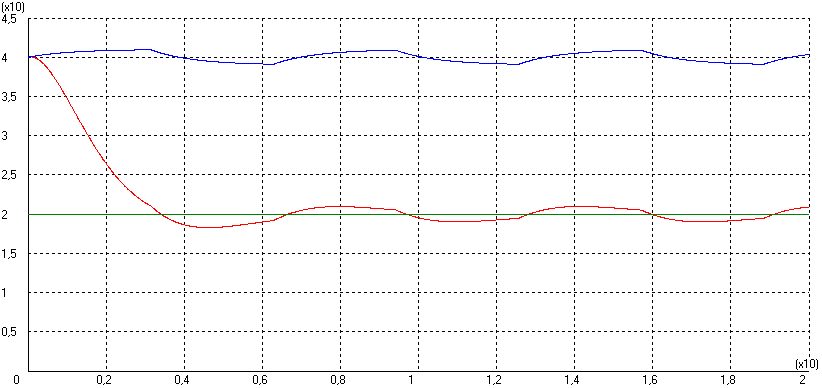 Рисунок 12 - График изменения скорости при Т1макс=2 с и Т2мин=1 с. Время перерегулирования tперег.=3,39 с. Система устойчива. Максимальная и минимальная скорости в установившемся режиме: vmax=20,9 км/ч; vmin=18,3 км/ч 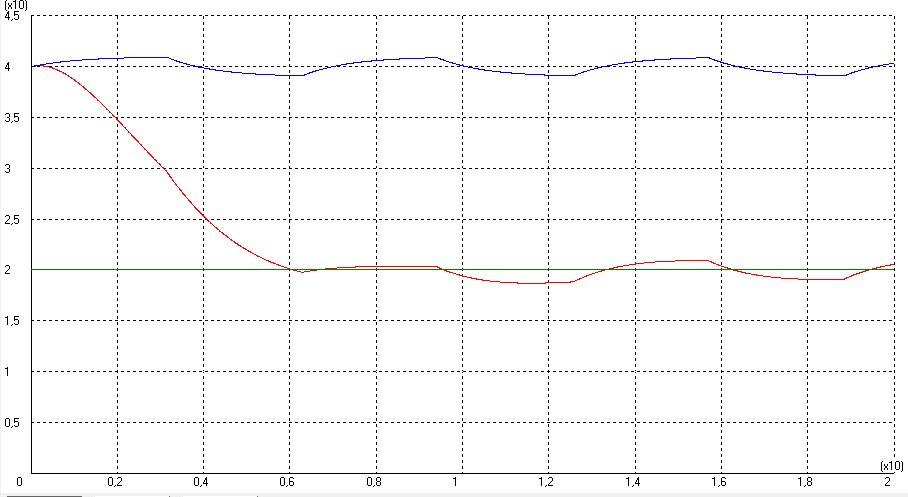 Рисунок 13 - График изменения скорости при Т1макс=2 с и Т2макс=4 с. Время перерегулирования tперег.=9,59 с. Система устойчива. Максимальная и минимальная скорости в установившемся режиме: vmax=20,8 км/ч; vmin=18,6 км/ч Вывод: наиболее практично использовать схему с постоянными времени Т1мин=0,5 с и Т2мин=1 с, т.к. время перерегулирования tперег составляет 6,33 с, система устойчива, а главное максимальная и минимальная скорости в установившемся режиме равны: vmax=20,7 км/ч; vmin=19,3 км/ч. Это значит, что отклонения скорости от заданной составляют не более 0,7 км/ч, следовательно, в данном режиме система лучше регулируется, чем в остальных режимах. 2 Синтез и исследование кодера и декодера информации В процессе выполнения синтеза и исследования кодера и декодера информации необходимо: - построить заданный код для передаваемого сообщения; - произвести расчет корректирующих способностей заданного кода; - произвести структурный синтез кодирующего устройства (кодера); - произвести структурный синтез декодирующего устройства (декодера); - осуществить, используя лабораторную компьютерную программу по моделированию дискретных устройств автоматики, исследование корректирующих способностей синтезированного декодера при введении заданных искажений кодовых комбинаций. Исходные данные к синтезу и исследованию кодера и декодера информации: 1) Для передачи 16 возможных сообщений использовать четыре информационных разряда в кодовой комбинации. 2) Для кодирования сообщения использовать следующий избыточный код, выбираемый по сумме двух последних цифр шифра студента: 5+0=5, следовательно, для кодирования сообщения используем код Бауэра 4) При исследовании декодера использовать следующие искажения кодовой комбинации: - одиночная ошибка в информационных разрядах; - одиночная ошибка в контрольных разрядах; - двойная ошибка в информационных разрядах; - двойная ошибка в контрольных разрядах; - одиночная ошибка в информационных разрядах плюс одиночная ошибка в контрольных разрядах; - тройная ошибка в кодовой комбинации. По результатам исследования декодирующего устройства с использованием лабораторной компьютерной программы по моделированию дискретных устройств автоматики должны: - дать оценку корректирующим способностям разработанного декодера; - результаты исследований привести в виде таблицы; - привести краткие пояснения по синтезу структурных схем кодера и декодера, а также результаты расчета корректирующих способностей и синдромов заданного кода. Общие сведения Процесс преобразования сообщения, передаваемого по каналу связи средствами телемеханики называется кодированием. Процесс обратного преобразования сигнала на приемной стороне в сообщение называется декодированием. Каждому сообщению до преобразования его в соответствующую кодовую комбинацию в устройстве телемеханики соответствует определенное двоичное числа, состоящее из  разрядов (исходный двоичный код), с помощью которого и идентифицируется то, или иное сообщение. Исходный разрядов (исходный двоичный код), с помощью которого и идентифицируется то, или иное сообщение. Исходный  разрядный двоичный код позволяет хранить в памяти телемеханического устройства разрядный двоичный код позволяет хранить в памяти телемеханического устройства  различных сообщений, т.е. для представления сообщений можно использовать все возможные комбинации двоичного числа. различных сообщений, т.е. для представления сообщений можно использовать все возможные комбинации двоичного числа. Кодирование сообщения, которое требуется передать по каналу связи, заключается в том, что в кодовую комбинацию помимо разрядов исходного кода (так называемых информационных разрядов) дополнительно, определенным образом, включают  избыточных (контрольных) разрядов, в результате чего передаваемому сообщению будет соответствовать не разрядная кодовая комбинация значений исходного двоичного кода, а избыточных (контрольных) разрядов, в результате чего передаваемому сообщению будет соответствовать не разрядная кодовая комбинация значений исходного двоичного кода, а  разрядное двоичное число. Добавление контрольных разрядов в исходную кодовую комбинацию позволяет защитить передаваемое сообщение от возможных его искажений в процессе передачи и приема этой кодовой комбинации, так как при искажении любого разряда исходного кода, соответственно, изменяется сумма весов его разрядов, а, следовательно, и порядковый номер сообщения. Кодирование (добавление контрольных разрядов) сообщения позволяет на приемной стороне не только обнаружить искажение передаваемой комбинации, но при определенных условиях (в зависимости от используемого кода и числа искаженных разрядов) и исправить (восстановить) ее. Процесс преобразования принятой кодовой комбинации в исходную кодовую комбинацию и есть суть декодирования (выделения сообщения). Для этих целей составляются определенным образом проверочные соотношения (так называемые синдромы) между переменными информационных и контрольных разрядов в виде аналитических формул по числу контрольных разрядов. По значению синдромов, представляющих собой двоичное число с числом разрядов, равных числу проверочных соотношений, при подстановке в которые значений принятых разрядов кодовой комбинации можно судить не только о характере искажения, если оно имеется, но и о номере конкретного разряда, в котором произошло искажение. Рассмотрим различные способы кодирования сообщений (информации) и принципы их декодирования на конкретных примерах. разрядное двоичное число. Добавление контрольных разрядов в исходную кодовую комбинацию позволяет защитить передаваемое сообщение от возможных его искажений в процессе передачи и приема этой кодовой комбинации, так как при искажении любого разряда исходного кода, соответственно, изменяется сумма весов его разрядов, а, следовательно, и порядковый номер сообщения. Кодирование (добавление контрольных разрядов) сообщения позволяет на приемной стороне не только обнаружить искажение передаваемой комбинации, но при определенных условиях (в зависимости от используемого кода и числа искаженных разрядов) и исправить (восстановить) ее. Процесс преобразования принятой кодовой комбинации в исходную кодовую комбинацию и есть суть декодирования (выделения сообщения). Для этих целей составляются определенным образом проверочные соотношения (так называемые синдромы) между переменными информационных и контрольных разрядов в виде аналитических формул по числу контрольных разрядов. По значению синдромов, представляющих собой двоичное число с числом разрядов, равных числу проверочных соотношений, при подстановке в которые значений принятых разрядов кодовой комбинации можно судить не только о характере искажения, если оно имеется, но и о номере конкретного разряда, в котором произошло искажение. Рассмотрим различные способы кодирования сообщений (информации) и принципы их декодирования на конкретных примерах.Коды, позволяющие обнаружить и исправить ошибки в кодовых комбинациях, называются помехозащищенными или корректирующими кодами, которые делятся на две группы: коды с обнаружением ошибок и коды с обнаружением и исправлением ошибок. При наличии  ошибок в принятой кодовой комбинации, последняя отличается от переданной значениями переменных или, что одно и то же, значениями ошибок в принятой кодовой комбинации, последняя отличается от переданной значениями переменных или, что одно и то же, значениями |