КР ТОАиТ Соколов. Забайкальский институт железнодорожного транспорта филиал федерального государственного бюджетного образовательного учреждения высшего образования Иркутский государственный университет путей сообщения
 Скачать 1.63 Mb. Скачать 1.63 Mb.
|

|
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА Федеральное государственное бюджетное образовательное учреждение высшего образования «Иркутский государственный университет путей сообщения» Забайкальский институт железнодорожного транспорта- филиал федерального государственного бюджетного образовательного учреждения высшего образования «Иркутский государственный университет путей сообщения» (ЗабИЖТ ИрГУПС) Факультет «Факультет очного обучения» Кафедра «Электроснабжение» К ЗАЩИТЕ ДОПУСКАЮ к.т.н., доцент Емельянов А.Г. «____»________2021 г._________ синтез и исследование регулятора скорости движущегося объекта. синтез и исследование кодера и декодера информации Курсовая работа по дисциплине «Теоретические основы автоматики и телемеханики» КP.510620.23.05.05.130-2021.ПЗ
Чита 2021 Аннотация Курсовая работа 34 страниц, 21 рисунков, 2 таблицы, 2 источника. СИНТЕЗ, РЕГУЛЯТОР СКОРОСТИ, САУ, СИНТЕЗИРОВАННЫЙ РЕГУЛЯТОР СКОРОСТИ, КОДЕР, ДЕКОДЕР ИНФОРМАЦИИ. Цель курсовой работы заключается в анализе синтеза и исследование регулятора скорости движущегося объекта, синтеза и исследования кодера и декодера информации. Содержание
Нормативные ссылки В настоящей работе использованы ссылки на следующие стандарты: ГОСТ Р 53431-2009 Автоматика и телемеханика железнодорожная. Термины и определения. ГОСТ 32.146-2000 Аппаратура железнодорожной автоматики, телемеханики и связи. Общие технические условия. НТП СЦБ/МПС-99 Нормы технологического проектирования устройств автоматики и телемеханики на федеральном железнодорожном транспорте. ГОСТ Р 54900-2012 Системы железнодорожной автоматики и телемеханики на перегонах железнодорожных линий. Требование безопасности и методы контроля. ГОСТ 2-749-84 Элементы и устройства железнодорожной сигнализации, централизации и блокировки. И-173-88 Обозначения условных графических устройств СЦБ в проектах железнодорожного транспорта. Условные обозначения и сокращения САУ – система автоматического управления. САР – система автоматического регулирования. ОР – объект регулирования. ЧЭ - чувствительный элемент. ИУ – измерительное устройство. УС – устройство сравнения. ОС – обратная связь. Введение Системой автоматического регулирования (САР) называется такая система, которая в течение достаточно длительного времени автоматически поддерживает требуемое неизменное значение некоторой физической величины (например, скорости линейного или углового перемещения) в каком-либо процессе или изменяет это значение по заданной программе. САР, работающие на поддержание постоянного значения регулируемой величины, называют также системами стабилизации (например, стабилизаторы напряжения или тока). Объект, параметры которого регулируются автоматически, называется объектом регулирования. В нашем случае, в качестве движущегося объекта регулирования может быть поезд, отдельный локомотив или любая другая подвижная единица. Параметр, значение которого требуется регулировать, называется регулируемой величиной. Устройство, предназначенное для автоматического регулирования, называют автоматическим регулятором или просто регулятором. В нашем случае, мы имеем дело с регулятором скорости. Регулятор, как правило, содержит следующие основные узлы: - измерительное устройство в виде чувствительного элемента, реагирующего на изменение значения регулируемой величины; - усилительно-преобразовательное устройство, преобразующее (как правило, по линейному закону) одну измеряемую величину в другую физическую величину, более удобную для последующего использования при формировании управляющего воздействия на исполнительное устройство; - исполнительное устройство, предназначенное для оказания непосредственного регулирующего воздействия на объект регулирования. Таким образом, САР есть совокупность автоматического регулятора и регулируемого объекта, и представляет собой замкнутую систему, в которой передача воздействий от одного ее звена к другому (внутренние воздействия) осуществляется по замкнутому контуру. На САР могут поступать внешние воздействия, основным из которых является задающее воздействие (например, заданное значение линейной скорости перемещения объекта), поступающее от внешнего задающего устройства. Совокупность задающего устройства и САР образует систему автоматического управления САУ, которая в общем виде, может иметь несколько различных объектов регулирования (например, система автоматического управления движением поездов на некотором участке пути САУ ДП). К внешним воздействиям на САР относятся также возмущающие воздействия на объект регулирования (например, изменение сопротивления движению движущегося поезда на участках пути с различным профилем). 1 Синтез и исследование регулятора скорости движущегося объекта Исходные данные 1) закон изменения фактической скорости движения объекта –  , км/ч; , км/ч; где  – периодически изменяющееся возмущающее воздействие с амплитудой – периодически изменяющееся возмущающее воздействие с амплитудой где Tв - период изменения возмущающего воздействия, с. 2) скорость движения объекта на момент начала регулирования – Vн, км/ч; 3) значение заданной скорости движения объекта – Vз, км/ч; 4) К1 – коэффициент усиления первого апериодического звена, характеризующий связь между текущим значением отклонения фактической скорости от заданной и величиной изменения регулируемой скорости; 5) Т1– постоянная времени первого инерционного звена, характеризующая инерционность реализации управляющего воздействия, с; 6) Т2 – постоянная времени второго инерционного звена, характеризующая инерционность цепи обратной связи регулятора скорости, с; Таблица 1 – Исходные данные для выполнения работы
По результатам исследования разработанной структурной схемы регулятора скорости с использованием лабораторной компьютерной программы по моделированию устройств САУ необходимо: - вывести на печать структурную схему регулятора; - вывести на печать графики изменения фактической скорости объекта в процессе ее регулирования; - произвести оценку качества регулирования скорости при изменении временных параметров апериодических звеньев регулятора в следующих пределах: Структурная схема регулятора скорости с использованием типовых звеньев САУ В качестве регулируемого объекта будем подразумевать колесное транспортное средство, линейное поступательное движение которого осуществляется за счет вращательного движения колесных пар. Следовательно, чувствительным элементом изменения скорости движения объекта может служить колесо 1 (рисунок 1), а в качестве измерительного устройства может служить, например, преобразователь скорости вращения колеса в напряжение постоянного тока или частоту переменного тока 2. 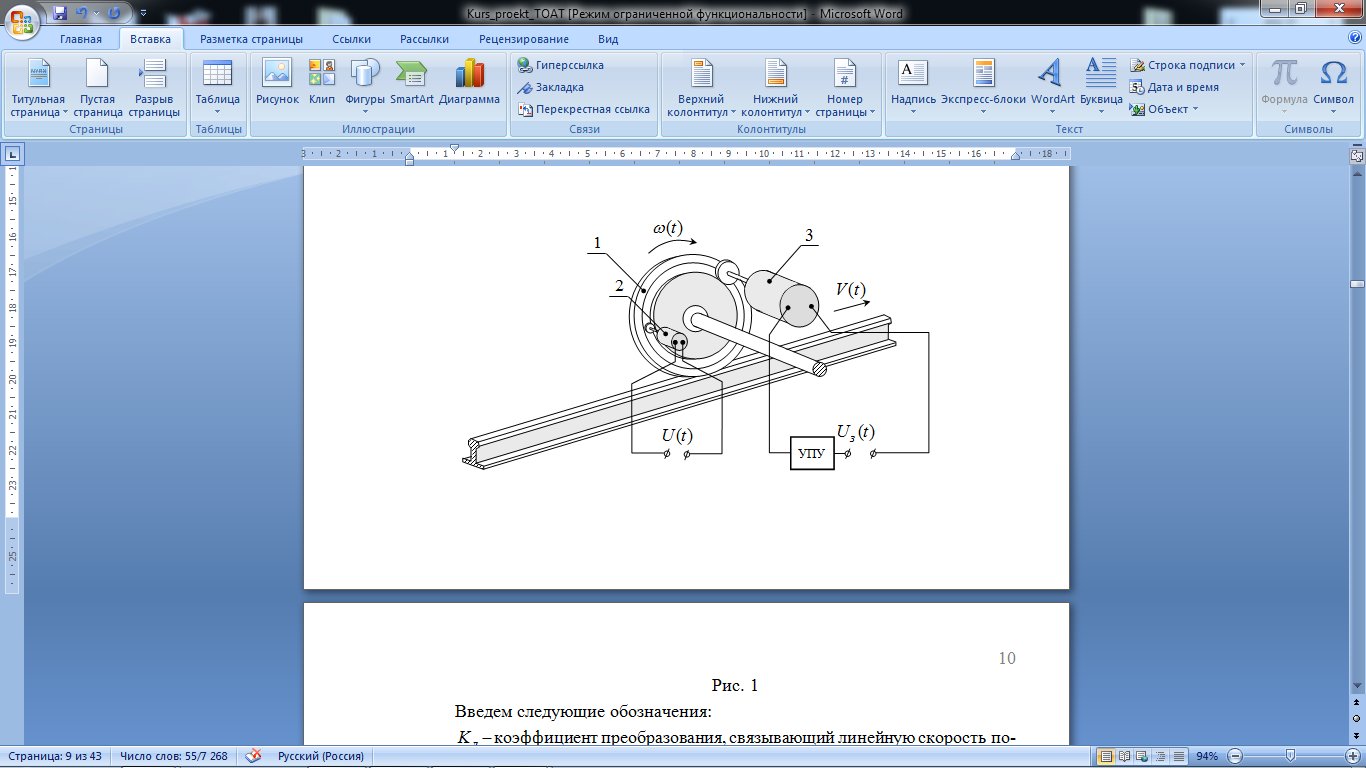 Рисунок 1 – Общий вид исследуемого объекта Введем следующие обозначения:  - коэффициент преобразования, связывающий линейную скорость поступательного движения транспортного средства V(t) с угловой скоростью - коэффициент преобразования, связывающий линейную скорость поступательного движения транспортного средства V(t) с угловой скоростью  вращения колеса: вращения колеса:   - коэффициент преобразования угловой скорости вращения колеса в напряжение постоянного тока: U(t) = Kв - коэффициент преобразования угловой скорости вращения колеса в напряжение постоянного тока: U(t) = Kв  ω(t) = Kв Ku V(t); ω(t) = Kв Ku V(t); - коэффициент преобразования линейной скорости в напряжение постоянного тока: - коэффициент преобразования линейной скорости в напряжение постоянного тока: где  В качестве усилительно-преобразовательного устройства (УПУ) может служить электросиловая установка, установленная на транспортном средстве и воздействующая на тяговый двигатель 3, являющийся исполнительным устройством, выполняющим функции ускорения или замедления (при электрическом реостатном торможении) вращения колеса. Коэффициент преобразования усилительно-преобразовательного устройства устанавливает связь между отклонением  задающего воздействия ( задающего воздействия ( ) от измеренного значения фактической скорости (Uф = Ku Vф) и требуемой силой тяги FT (или силой торможения WT), а именно: FT = Kуп ΔU. Тяговый двигатель в режиме тяги реализует требуемое значение силы FT или в режиме генератора , требуемое значение силы WT обеспечивая соответствующее изменение скорости вращения колеса в единицу времени (угловое ускорение) – ) от измеренного значения фактической скорости (Uф = Ku Vф) и требуемой силой тяги FT (или силой торможения WT), а именно: FT = Kуп ΔU. Тяговый двигатель в режиме тяги реализует требуемое значение силы FT или в режиме генератора , требуемое значение силы WT обеспечивая соответствующее изменение скорости вращения колеса в единицу времени (угловое ускорение) –  . С целью упрощения структурной схемы регулятора, скорости принимаем допущение о равенстве абсолютного значения приращения скорости в единицу времени, как при регулируемом увеличении скорости вращения колеса, так и при ее снижении в процессе торможения транспортного средства. Очевидно, что приращению скорости вращения колеса соответствует приращение линейной скорости поступательного движения транспортного средства. . С целью упрощения структурной схемы регулятора, скорости принимаем допущение о равенстве абсолютного значения приращения скорости в единицу времени, как при регулируемом увеличении скорости вращения колеса, так и при ее снижении в процессе торможения транспортного средства. Очевидно, что приращению скорости вращения колеса соответствует приращение линейной скорости поступательного движения транспортного средства. Между величиной отклонения  значений заданной скорости значений заданной скорости  от фактической от фактической  и величиной и величиной  существует очевидная зависимость: существует очевидная зависимость:  где К - коэффициент пропорциональности. Следовательно, если известна разность, то можно определить общий коэффициент преобразования (усиления) К1 тракта, состоящего из усилительно-преобразовательного и исполнительного устройств, из следующего соотношения:  Значение коэффициента К1 является заданным, а на рисунке 2 приведена общая структурная схема регулятора скорости. 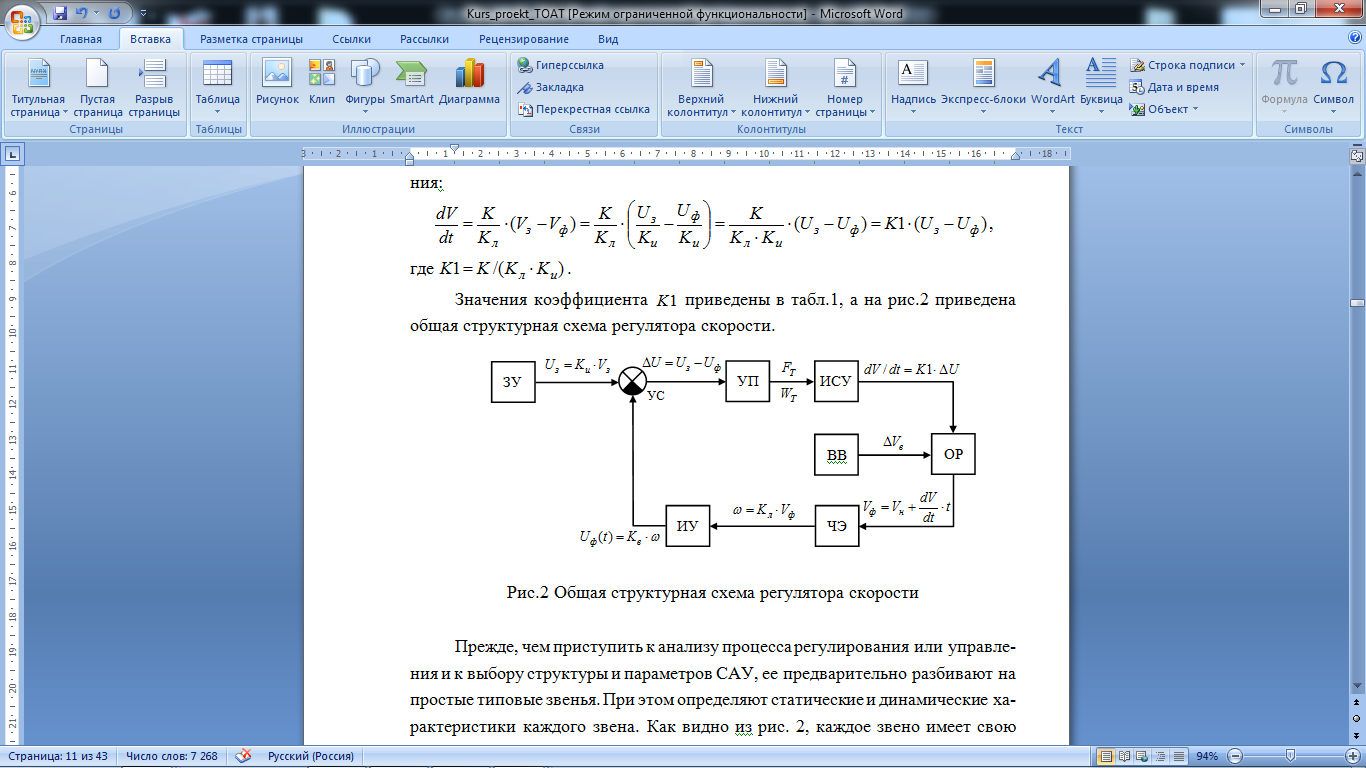 Рисунок 2 – общая структурная схема регулятора скорости Прежде, чем приступить к анализу процесса регулирования или управления и к выбору структуры и параметров САУ, ее предварительно разбивают на простые типовые звенья. При этом определяют статические и динамические характеристики каждого звена. Как видно из рис. 2, каждое звено имеет свою входную и выходную величину. Так как коэффициент преобразования изменяет только масштаб переменных, то в дальнейшем удобнее оперировать с входными и выходными переменными в масштабе скорости. Тогда статическая характеристика объекта регулирования ОР будет выражать собой зависимость между выходной (регулируемой) величиной Vф и входной величиной (регулирующим воздействием)  и иметь вид: Vф = Vн + ΔV, где Vн скорость объекта на момент начала регулирования, ΔV– требуемое приращение скорости в установившемся режиме регулирования. Кроме того, на регулируемый объект может поступать внешнее периодически изменяющееся возмущающее воздействие ΔVв, обусловленное изменением сопротивления движению транспортного средства на участках пути с различным профилем. На рис. 3 представлена структурная схема объекта регулирования, состоящая из блока генератора ступенчатой функции F = Vн и двух блоков, реализующих функцию суммирования двух сигналов. и иметь вид: Vф = Vн + ΔV, где Vн скорость объекта на момент начала регулирования, ΔV– требуемое приращение скорости в установившемся режиме регулирования. Кроме того, на регулируемый объект может поступать внешнее периодически изменяющееся возмущающее воздействие ΔVв, обусловленное изменением сопротивления движению транспортного средства на участках пути с различным профилем. На рис. 3 представлена структурная схема объекта регулирования, состоящая из блока генератора ступенчатой функции F = Vн и двух блоков, реализующих функцию суммирования двух сигналов.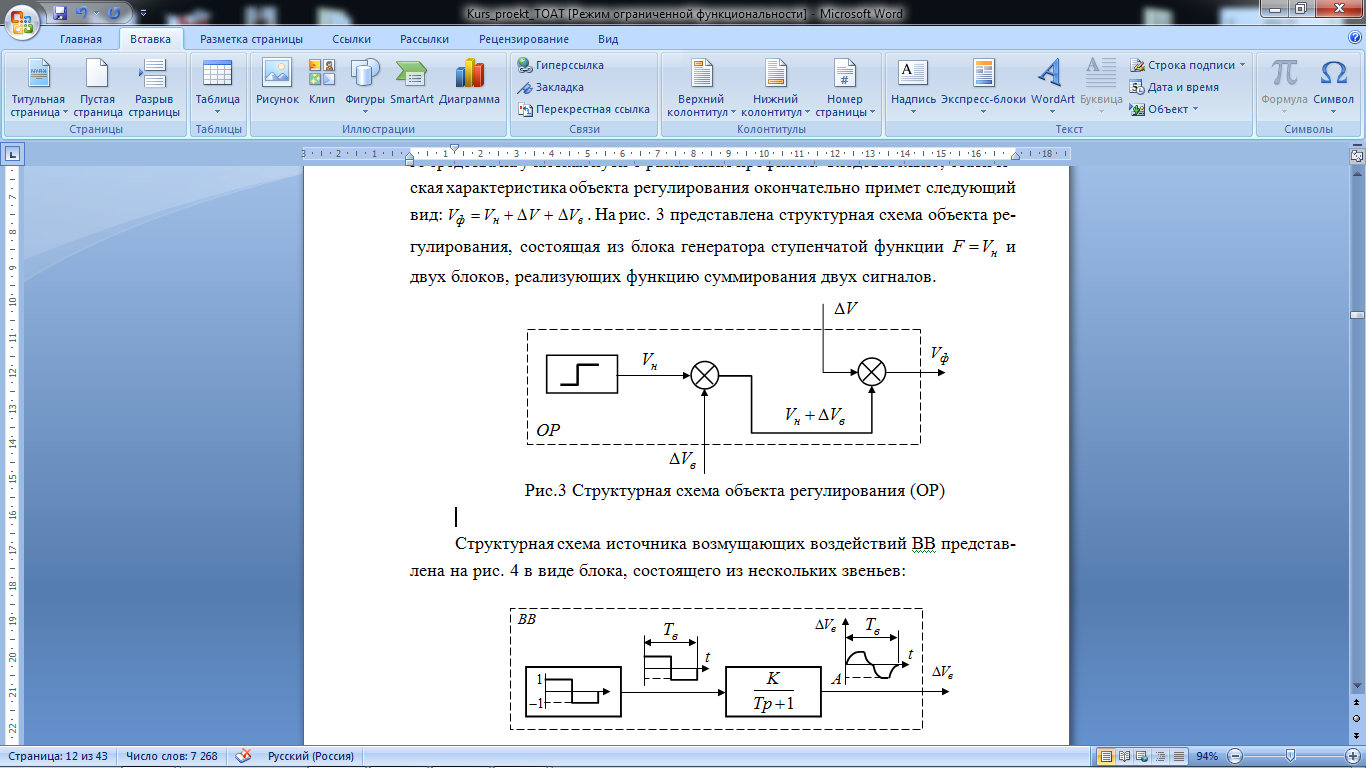 Рисунок 3 – Структурная схема регулирования ОР Структурная схема источника возмущающих воздействий ВВ представлена на рисунке 4 в виде блока, состоящего из нескольких звеньев: |