Организация. Задача 1 по трансформаторам
 Скачать 0.82 Mb. Скачать 0.82 Mb.
|

|
К пункту 2. Построение рабочих характеристик и механической характеристики по желанию студента и возможности выхода на ЭВМ можно провести одним из 2-х методов: С помощью круговой диаграммы. С помощью ЭВМ. В этом случае отпадает необходимость в построении круговой диаграммы. Построение рабочих и механической характеристик с помощью круговой диаграммы Круговая диаграмма строится для одной фазы асинхронного двигателя и представляет собой геометрическое место концов векторов тока обмотки статора при постоянных значениях частоты и подводимого напряжения и изменении скольжения от нуля до ± ∞. Для построения упрощенной диаграммы асинхронного двигателя достаточно провести два предельных опыта — холостого хода и короткого замыкания, из которых за исходные принимаются следующие величины (в нашем случае из данных индивидуального задания): Величина тока холостого хода I0, А при номинальном напряжении UН Мощность потерь холостого хода р0, Вт при номинальном напряжении и частоте. Фаза φ0 тока холостого хода I0 по отношению к подводимому фаз ному напряжению UНФ, определяемая из соотношения φ0 = arccos φ0; cos φ0 = Величина тока короткого замыкания IК при номинальном подводимом напряженииUН, получаемая перерасчетом по формуле Мощность потерь короткого замыкания рк при номинальном подводимом напряжении, полученная перерасчетом по формуле  Фаза φк тока короткого замыкания Iк по отношению к фазному под веденному напряжению Uнф, определяемая из соотношения φк = arccos φк, где cos φк = Активное сопротивление фазной обмотки статора R1, приведенное к расчетной рабочей температуре 75°С по формуле где R1х — сопротивление холодной обмотки при Өх = 2О°С. Активное сопротивление короткого замыкания двигателя, величина которого определяется из соотношения: 9. Активное сопротивление фазы обмотки ротора R'2, приведенное к обмотке статора: R'2 = Rк – R1, (2.5) Построение круговой диаграммы На листе миллиметровой бумаги размером (180— 220) X (250—300) мм наносят оси координат, начало которых в левом нижнем углу листа (рис. 2.1). По оси ординат в произвольном масштабе откладывают вектор фазного номинального напряжения Uнф. Величину масштаба тока mi, А/мм выбирают так, чтобы отрезок ОК = Iк/mi удобно помещался на листе бумаги и был бы равен 200—250 мм. Значение mi округляют до ближайшего удобного для пользования числа. Строят вектор тока I0. Для этого под углом φ0 к вектору Uнф проводят прямую, на которой из начала координат (точка О) откладывают отрезок ОН = I0/mi, мм. Через точку Н проводят прямую Hh, параллельную оси абсцисс. Строят вектор тока IК. Для этого из начала координат проводят прямую под углом φк к вектору напряжения Uнф, на которой откладывают отрезок OK=IK /mi, мм. Строят окружность через точки Н и К, центр которой находят следующим образом. Точки Н и К соединяют прямой и из середины ее восстанавливают перпендикуляр до пересечения с линией Hh в точке О2, которая является центром искомой окружности. Определение токов. Из точки О в масштабе токов с помощью циркуля откладывают вектор номинального тока статора IН так, чтобы конец этого вектора (точка Д) лежал на окружности токов, ОД = Iн/mi, мм. 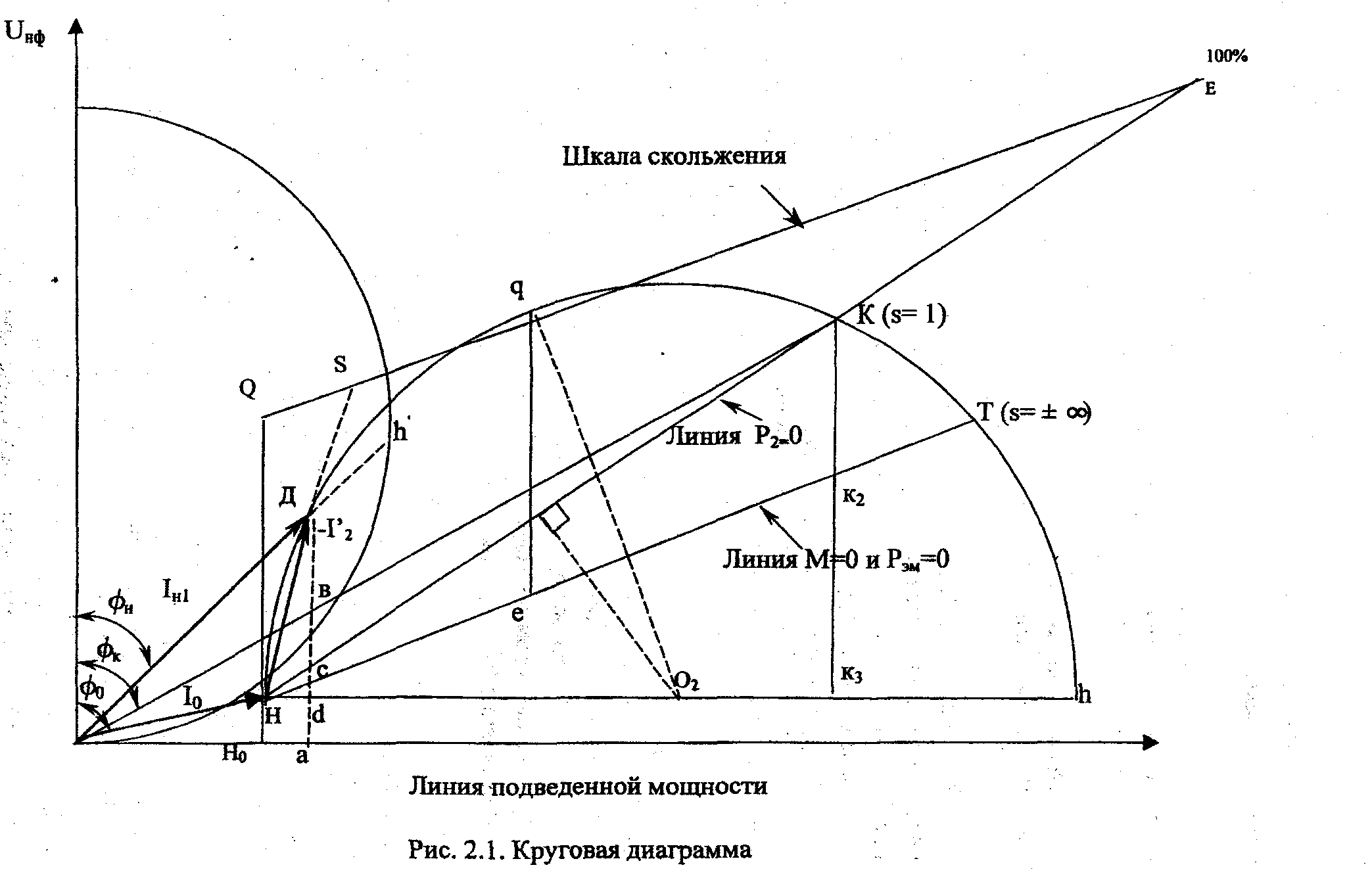 Затем, соединив точки Д и Н, получают треугольник токов ОДН, стороны которого определяют токи I0 = miOH; I’2 = miHД; I1 = miОД Кроме того, опустив перпендикуляр из точки Д на ось абсцисс (Д - а), получают прямоугольный треугольник ОДа, из которого определяют активную и реактивную составляющие тока статора: I1а = miДа; I1р = miОа Подведенная мощность P1. Потребляемая трехфазным двигателем мощность из сети определяется по формуле: P1 = 3U1фI1cosφ1 Поскольку U1ф=U1н=const, a I1cosφ1=I1а, то мощность P1 пропорциональна активной составляющей тока статора. На круговой диаграмме мощность P1характеризуется отрезком Да, то есть P1 = mpДа, где mр = 3U1нфmi - масштаб мощности, Вт/мм. Потребляемую двигателем мощность из сети на диаграмме считывают по прямой от оси абсцисс, называемой линией подведенной мощности, до заданной точки на окружности токов. Полезная мощность на валу P2. Полезную мощность асинхронного двигателя отсчитывают по вертикали от окружности токов до прямой, соединяющей две точки на окружности токов, в которых полезная мощность равна нулю. Одной из таких точек на диаграмме является точка Н, соответствующая холостому ходу двигателя, а другой - точка К, соответствующая короткому замыканию. В режиме короткого замыкания ротор двигателя неподвижен (n = 0) при номинальном подведенном к статору напряжении, следовательно, Р2 = 0. Для заданной точки Д на окружности токов полезная мощность равна Р2 = mpДв. Электромагнитная мощность и электромагнитный момент. Величина электромагнитной мощности асинхронного двигателя (мощности, которая передается вращающимся магнитным полем через воздушный зазор от статора к ротору) отсчитывается на круговой диаграмме по перпендикуляру к диаметру окружности от точки на окружности токов до линии электромагнитной мощности. Для построения этой линии необходимо провести прямую через две точки окружности токов, в которых электромагнитная мощность равна нулю. Такими точками являются Н и Т. Первая точка Н соответствует скольжению s ≈ 0, поскольку ротор двигателя при этом вращается с частотой, практически равной частоте вращения магнитного поля статора n1. Вторая точка Т соответствует скольжению S = ± ∞, то есть бесконечно большой частоте вращения ротора. Обмотка ротора при этом обладает реактивным сопротивлением и ток в ней будет тоже реактивным, а активная составляющая тока ротора, обусловливающая активную электромагнитную мощность, будет равна нулю. Если точку Н можно получить по данным опыта холостого хода, то точку Т экспериментально получить нельзя, так как при этом пришлось бы вращать ротор с частотой n = ±∞, что нереально. Поэтому линию электромагнитной мощности обычно строят по точкам Н и К2; ее определяют путем деления отрезка ККз на две части, используя соотношение Для заданной точки Д на окружности токов электромагнитная мощность двигателя равна Рэм = mp Дс. Электромагнитный момент двигателя оценивают из соотношений, Линию НТ называют также линией моментов. Коэффициент мощности. Для определения коэффициента мощности cosφ асинхронного двигателя по круговой диаграмме строят полуокружность с диаметром оf на оси ординат. Тогда для заданной точки Д на окружности токов имеем Для удобства расчетов целесообразно диаметр оf полуокружности принять равным 100мм. В этом случае Скольжение. Скольжение s на круговой диаграмме определяется по шкале скольжения, для построения которой в точке Н0 на оси абсцисс восстанавливают перпендикуляр H0Q, проходящий через точку Н. Затем из произвольно выбранной точки Q проводят прямую QE параллельно линии электромагнитной мощности НТ до пересечения с продолжением линии полезной мощности НК в точке Е. Отрезок QE делят на 100 равных частей и получают шкалу скольжения, по которой для определения скольжения двигателя пользуются вектором приведенного тока ротора I’2 как стрелкой. Для заданной точки Д на окружности токов скольжение определяют продолжением вектора I’2 (линии НД) до пересечения со шкалой скольжения в точке s. Соответствующая этой точке цифра на шкале скольжения выражает величину скольжения в процентах. КПД двигателя. КПД двигателя оценивают отношением η = P2/Р1. Потребляемая P1 и полезная Р2 мощности двигателя определяют из круговой диаграммы: Р1 = mpДа и Р2 = mРДв, тогда η = Дв/Да Общие потери в двигателе ∑р характеризуются отрезком в масштабе мощности, то есть ∑р = mрав, из которых: mрав постоянные потери (потери в стали, механические и добавочные); mр cd - потери в меди статора; mpbc -потери в меди ротора. Начальный пусковой ток и момент. Начальный пусковой ток и момент двигателя определяются положением точки К на окружности токов, соответствующих скольжению S = 1 (100%), пусковой момент двигателя в масштабе момента характеризуется отрезком КК2, то есть Мп = mм КК2, а начальный пусковой ток в масштабе определяется отрезком ОК, то есть Iп = miОК. Если точка Д на окружности токов соответствует номинальному режиму работы двигателя, то кратность пускового момента и пускового тока оцениваются по состоянию отрезков Перегрузочная способность двигателя. Перегрузочная способность двигателя оценивается отношением максимального момента Мм к номинальному Мн. Для определения максимального момента двигателя на круговой диаграмме из точки О2 проводят перпендикуляр к линии электромагнитной мощности (НТ) и продолжают его до пересечения с окружностью токов в точке q. Из точки q проводят прямую параллельно оси ординат до встречи с линией НТ в точке е. Отрезок qe в масштабе моментов определяют величину максимального момента, то есть Мт = тmqe. Если точка Д на окружности токов соответствует номинальному режиму работы двигателя, то перегрузочная способность его оценивается соотношением К пункту 2. Рабочие характеристики асинхронного двигателя строят в зависимости от полезной мощности на валу двигателя Р2, откладываемой по оси абсцисс в единицах мощности или в относительных единицах (о.е.). На оси ординат в соответствующем масштабе откладывают следующие величины двигателя: n - частоту вращения ротора, об/мин; М - вращающий момент, Нм; I1 - значение величины тока статора, A; P1 - потребляемая из сети мощность, Вт или кВт; η - КПД, %; cosφ - коэффициент мощности. Все эти данные определяют по круговой диаграмме для шести точек по полезной мощности: P2i = 0; 0,25; 0,50; 0,75; 1,00; 1,25; от Рн. При этом, прежде всего, определяют рабочую точку на круговой диаграмме, соответствующей заданному значению полезной мощности P2i Для этого находят длину отрезка прямой, соответствующей заданному значению P2i на диаграмме, например, для мощности P2i=Рн это отрезок Дb= Pн/mр. Этот отрезок встраивают между окружностью токов и линией полезной мощности перпендикулярно к диаметру окружности токов Hh. Таким образом находят рабочую точку Д, соответствующую номинальной мощности Рн. Аналогично определяют рабочие точки на круговой диаграмме и при других заданных значениях полезной мощности двигателя P2i по соответствующим величинам отрезков, длина которых принимается из следующего ряда значений: (0; 0,25; 0,50; 0,75; 1,00; 1,25) Db. Частота вращения ротора двигателя в каждой рабочей точке ni - вычисляется из соотношения: ni = n1(1-Si), где Si - величина скольжения в i-й точке, определяемая непосредственно из круговой диаграммы; n1 - частота вращения магнитного поля двигателя, которую определяют из зависимости n1 = 60f1/р. При частоте питающего напряжения f = 50 Гц числу пар полюсов двигателя р=1, 2, 3..., к соответствует следующая шкала частоты вращения магнитного поля: 3000,1500,1000,..., 3000/к об/мин. В индивидуальном задании приведено значение номинальной частоты вращения ротора двигателя nн которая меньше n1 на величину скольжения SH= (2-6) %, т.е. nн = n1(1-Sн). Значение величин ni, Mi, I1i, ηiиcosφi оценивают при соответствующем значении Р2i непосредственно из круговой диаграммы, а результаты заносят в таблицу 4. Рабочие характеристики асинхронного двигателя строят по данным таблицы 4 на листе миллиметровой бумаги размером 150X150 мм. Таблица 4
Механическую характеристику асинхронного двигателя n =f(M) строят с помощью круговой диаграммы следующим образом. Задаются значениями скольжения Si %=0; 2; 4; 6; 10; 20; 30; 50; 70; 100% и определяют соответствующие им точки на окружности токов круговой диаграммы, а также величины момента Mi. Частоту вращения ротора двигателя ni находят из известного соотношения ni(1-Si). Полученные данные заносят в таблицу 5 и по ним строят механическую характеристику двигателя с учетом максимального момента и критического скольжения. Таблица 5
Построение рабочих и механической характеристик с помощью ЭВМ Для решения задачи необходимо знать параметры двигателя. Активное сопротивление статора определено по формуле (2.3.), а короткого замыкания по (2.4.). Индуктивное сопротивление короткого замыкания определяем по формуле  (2.6.) (2.6.)а приведенное активное сопротивление фазы обмотки ротора определено по формуле (2.5.). Индуктивное сопротивление рассеяния статора и ротора определим приближенно Определим номинальное скольжение двигателя (SН) где Ω1 = 314/p рад/с – угловая частота вращения магнитного поля статора при f = 50 Гц; Ωн = πnн/30 = 0,105nн – номинальная угловая скорость вращения ротора, рад/с. Задаваясь значением скольжения s = (0,2 – 1,6) SН с шагом 0,2SН, производим расчет рабочих характеристик по следующему алгоритму. Определяем ток ротора  Определяем косинус угла между векторами тока ротора и его активной составляющей  Определяем активную и реактивную составляющие тока холостого хода Определяем активную и реактивную составляющие тока статора Определяем ток статора Определяем cosφ Определяем мощность, потребляемую из сети Определяем электрические потери в статоре в роторе Определяем добавочные потери  Pдоб_н = 0,005Pн – добавочные потери при номинальной нагрузке. Определяем суммарные потери ∑P = Pэ1 + Рэ2 + Р0 + Рдоб, где Р0 = Рст + Рмех берется из задания. Определяем полезную мощность Р2 = Р1 - ∑P Определяем угловую частоту вращения ротора Ω = Ω1(1-s) Определяем момент М = Р2/Ω Определяем КПД двигателя η = (Р2/Р1)100% Данные расчета сводим в табл.6 Для точек s = 0,1; 0,2; 0,3; 0,5; 0,7; 1,0 программа осуществляет расчет механической характеристики по аналогичному алгоритму. После этого следует заполнить табл.6. Таблица 6 |