№ 2981925 - Задача 1 Вар.26. Задача 1 Расчет механических характеристик двигателя постоянного тока независимого возбуждения
 Скачать 281 Kb. Скачать 281 Kb.
|

|
ЗАДАЧА 1 Расчет механических характеристик двигателя постоянного тока независимого возбуждения ЗАДАНИЕ Рассчитать и построить естественную механическую характеристику ɷ =f(M) двигателя постоянного тока независимого возбуждения (ДПТ НВ). Рассчитать добавочное сопротивление в цепи якоря ДПТ НВ при регулировании скорости до значения Рассчитать и построить искусственную механическую характеристику ДПТ НВ ɷ=f(M) при регулировании скорости при введении добавочного сопротивления в цепь якоря. Рассчитать и построить искусственную механическую характеристику ДПТ НВ ɷ=f(M) при регулировании скорости за счет ослабления магнитного потока Рассчитать и построить искусственную механическую характеристику ДПТ НВ ɷ=f(M) при изменении подводимого к цепи якоря напряжения Рассчитать и построить искусственную механическую характеристику ДПТ НВ ɷ =f(M) для режима реверса (момент допустимый и начальная скорость вращения ДПТ НВ равны: Изобразить схемы включения ДПТ НВ для указанных режимов. Примечания: 1. Технические данные ДПТ НВ выбирать из таблицы 1 в соответствии с вариантом, указанным преподавателем. 2. Все механические характеристики ДПТ НВ построить на одной координатной плоскости. Таблица 1 - Технические данные ДПТ НВ.
Решение: Расчёт и построение естественной механической характеристики ɷ=f(M) ДПТ НВ. Естественная механическая характеристика – зависимость скорости вращения двигателя от момента соответствует основной (паспортной) схеме включения, номинальным значениям напряжения и магнитного потока возбуждения при отсутствии добавочного резистора в цепи якоря. Зависимость ω=f(M) описывается выражением:  где UH – номинальное напряжение, кФН – произведение конструктивного коэффициента двигателя и номинального магнитного потока, R0 – внутреннее сопротивление якорной цепи двигателя. Произведение кФН можно определить по паспортным данным по выражению:  где Естественная механическая характеристика ДПТ НВ без учёта реакции якоря представляет собой прямую линию и может быть построена по двум точкам. Одна из которых соответствует режиму идеального холостого хода (М = 0 и  ), другая – номинальному режиму работы (М = МН = kФНIH и ω = ωН). ), другая – номинальному режиму работы (М = МН = kФНIH и ω = ωН).Скорость идеального холостого хода: Номинальный момент двигателя: 1. Точка холостого хода с координатами: 2. Точка номинального режима с координатами: Строится естественная механическая характеристика (рис. 6, хар. 1). 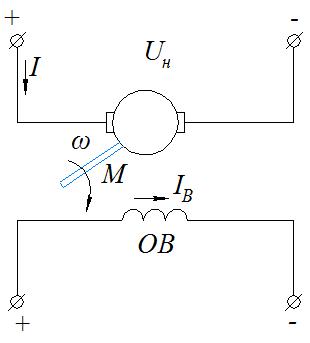 Рис. 1- Схема включения ДПТ НВ для снятия естественной механической характеристики Расчет добавочного сопротивления в цепи якоря при регулировании скорости Добавочное сопротивление можно определить из выражения:  где Рассчитать и построить искусственную механическую характеристику ДПТ НВ ɷ =f(M) при регулировании скорости при введении добавочного сопротивления в цепь якоря Искусственная механическая характеристика ДПТ НВ представляет собой также прямую линию и может быть построена по двум точкам. Одна из которых соответствует режиму идеального холостого хода (М=0 и 1. Точка холостого хода с координатами: 2. Точка искусственной характеристики: Строится искусственная механическая характеристика (рис. 6, хар. 2). 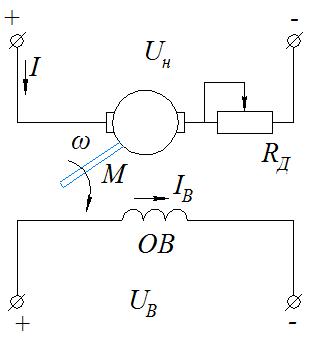 Рис. 2 - Схема включения ДПТ НВ для снятия искусственной механической характеристики при введении в цепь якоря добавочного сопротивления 4. Расчет и построение механической характеристики ДПТ НВ при значении магнитного потока ФИ = 0,4ФH. При изменении магнитного потока скорость идеального холостого хода рассчитывают следующим образом: где Тогда уравнение искусственной механической характеристики при ослабленном магнитном потоке примет вид: В соответствии с формулой механическая характеристика ДПТ НВ представляет собой линейную зависимость скорости от момента, поэтому ее можно построить по двум точкам: 1. Точка холостого хода с координатами: 2. Точка искусственной характеристики: Строится искусственная механическая характеристика (рис. 6, хар. 3). 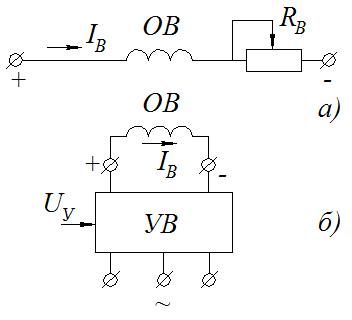 Рис. 3 Схемы включения ДПТ НВ при изменении магнитного потока за счет изменения сопротивления в цепи возбуждения (а) и за счет изменения подводимого к цепи возбуждения напряжения (б) 5. Рассчитать и построить искусственную механическую характеристику ДПТ НВ ɷ =f(M) при изменении подводимого к якорю напряжения. Искусственная механическая характеристика ДПТ НВ представляет собой также прямую линию и может быть построена по двум точкам. Одна из которых соответствует режиму идеального холостого хода (М = 0 и 1. Точка холостого хода с координатами: 2. Точка искусственной характеристики: Строится искусственная механическая характеристика (рис. 6, хар. 4). 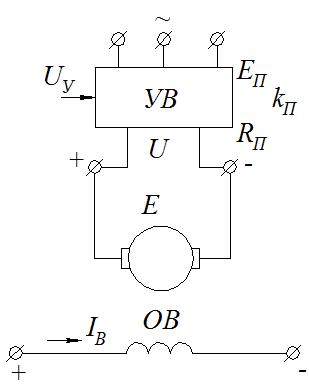 Рис. 4 - Схема включения ДПТ НВ для снятия искусственной механической характеристики при изменении подводимого к цепи якоря напряжения. 6. Расчёт и построение механической характеристики ДПТ НВ при реверсе. Реверс ДПТ НВ осуществляется изменением полярности напряжения на якоре и введением добавочного резистора в цепь якоря для ограничения тока, т.е. также как и режим торможения противовключением, который является первой фазой реверса. Второй фазой является разгон двигателя в обратном направлении с добавочным сопротивлением в цепи якоря. Уравнение механической характеристики ДПТ НВ в режиме реверса   Механическую характеристику можно построить по двум точкам, т.к. согласно уравнения она представляет собой прямую линию. Координата одной точки соответствует начальной фазе торможения (М = – МДОП, ω = ω0), другой – при М = 0, ω = − ω0. 1. Начальная фаза торможения хода с координатами: 2. Вторая фаза торможения с координатами: Строится искусственная механическая характеристика при реверсе (рис. 6, хар. 5). 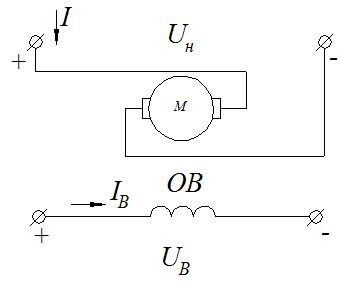 Рис. 5 - Схема включения ДПТ НВ для снятия искусственной механической характеристики при реверсе. 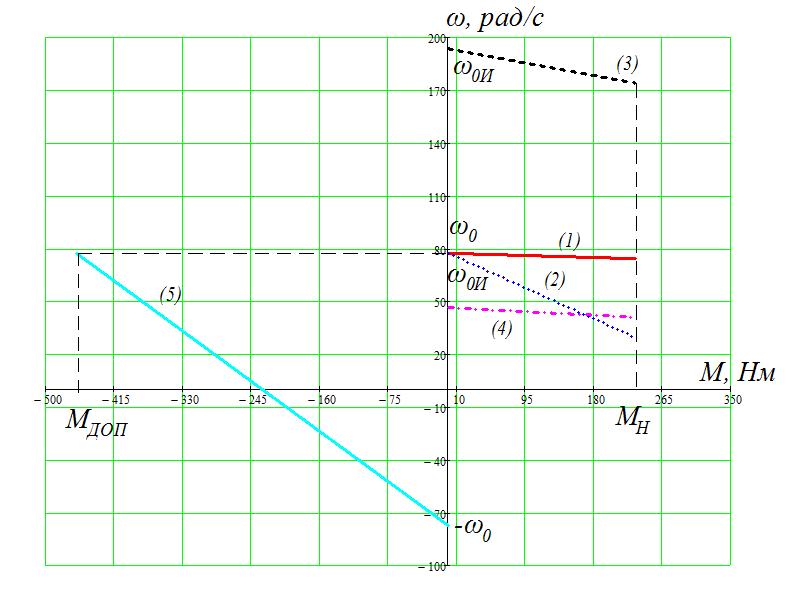 Рис. 6 - Механические характеристики ДПТ НВ. |