Задание на контрольную работу. I. Механика электропривода
 Скачать 1.34 Mb. Скачать 1.34 Mb.
|

|
Основное уравнение движения электропривода. При переменных статических моментах и моментах инерции, зависящих от скорости, времени, угла поворота вала двигателя (линейного перемещения РО), уравнение движения электропривода записывается в общем виде: При постоянном моменте инерции Правую часть уравнения Темп разгона зависит от момента инерции Для анализа режимов работы и решения задач удобнее записать основное уравнение движения в относительных единицах (о.е.). Приняв за базовые значения момента где Пример 2. Рассчитать для механизма с двигателем ( Основное уравнения движения в о.е. Механическая постоянная времени двигателя Значения Скорость идеального холостого хода: Номинальный электромагнитный момент: Механическая постоянная времени: Динамический момент: Ускорение электропривода (при  Приращение скорости за промежуток времени Конечное значение скорости на участке: Приращение угла поворота: Определим полученные значения абсолютных единицах: Расчет характеристик, параметров схемы включения и переходных процессов двигателя постоянного тока независимого возбуждения. Напряжение U, приложенное к якорной цепи двигателя постоянного тока, уравновешивается ЭДС двигателя и падением напряжения в сопротивлениях якорной цепи от протекающего тока якоря I. где R – сопротивление якорной цепи, Ом; L – индуктивность якорной цепи, Гн; Ф – магнитный поток двигателя, Вб; Для установившегося режима уравнение примет вид: при этом для двигателя постоянного тока с независимым возбуждением поток Ф постоянен, а в двигателях последовательного и смешанного возбуждения поток Ф зависит от тока якоря. Выражение механической характеристики двигателя постоянного тока где Естественной называют механическую характеристику двигателя при номинальном напряжении питающей сети Принимая за базовые величины Естественная механическая характеристика двигателя постоянного тока с независимым возбуждением ( При Если Если Таким образом, естественная механическая характеристика двигателя постоянного тока с независимым возбуждением строится по двум точкам. По двум точкам строятся и искусственные механические характеристики, только используется формула (*), и изменяются в зависимости от изменяемого параметра схемы включения: Пример 3. Для двигателя постоянного тока ( Для построения механической Скорость идеального холостого хода при номинальном потоке: где Если сопротивление цепи якоря не приведено в каталоге, его можно рассчитать приближенно из условия примерного равенства постоянных и переменных потерь в номинальном режиме работы двигателя. Тогда Скорость идеального холостого хода: Номинальный электромагнитный момент: Выбираем базовые величины Пример 4. Для двигателя постоянного тока ( Для обеспечения минимального времени переходного процесса двигатель должен работать с предельным моментом Максимальный момент пусковой диаграммы: Определим момент переключения Рассчитаем полные сопротивления якорной цепи: Проверим правильность расчета: Величины ступеней сопротивлений: Максимальный ток пусковой диаграммы: Ток переключения правильной пусковой диаграммы: 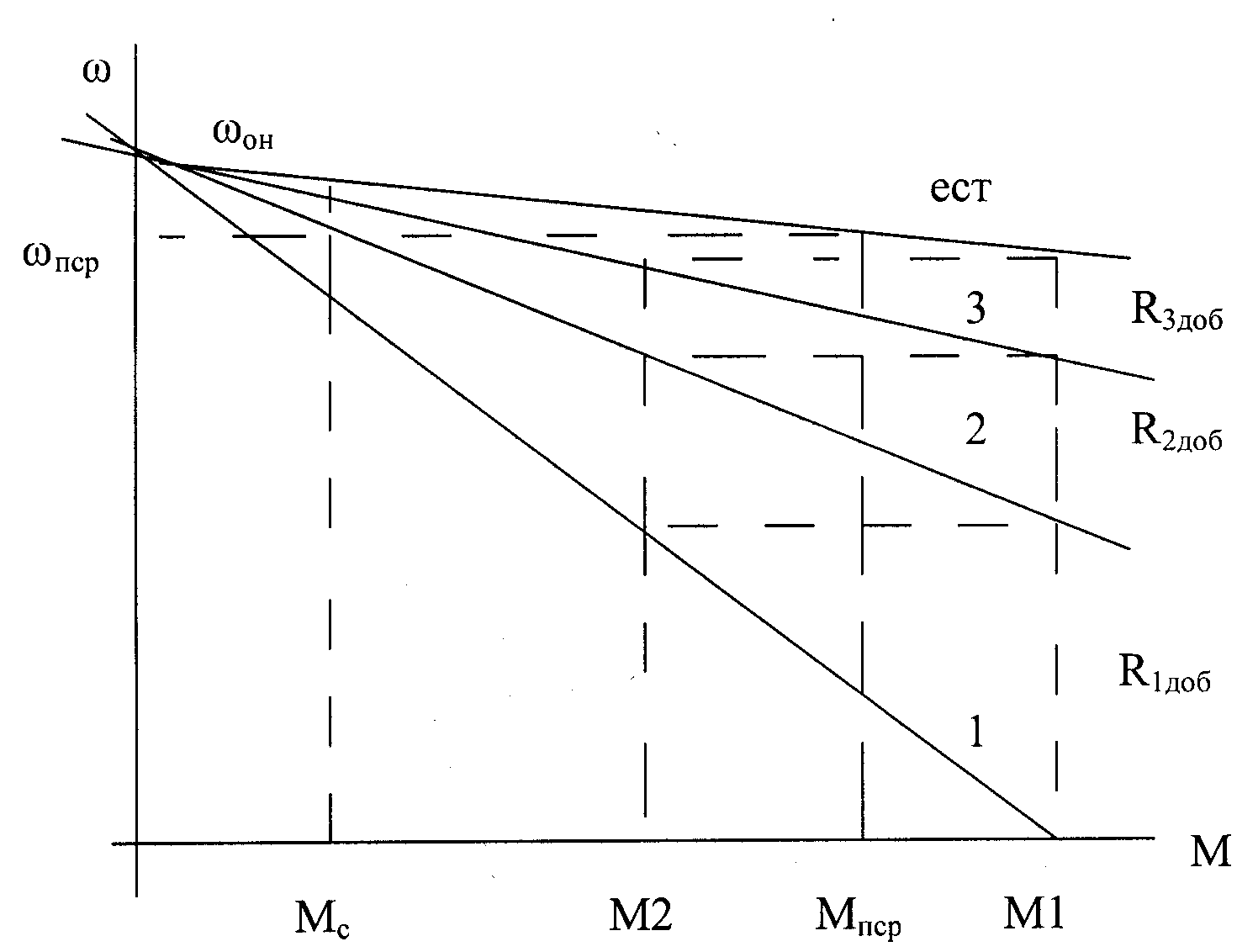 |