прецессия_лр1. Закон прецессии, проверяемый в данной работе, можно описать с помощью следующей формулы (1)
 Скачать 1.58 Mb. Скачать 1.58 Mb.
|

 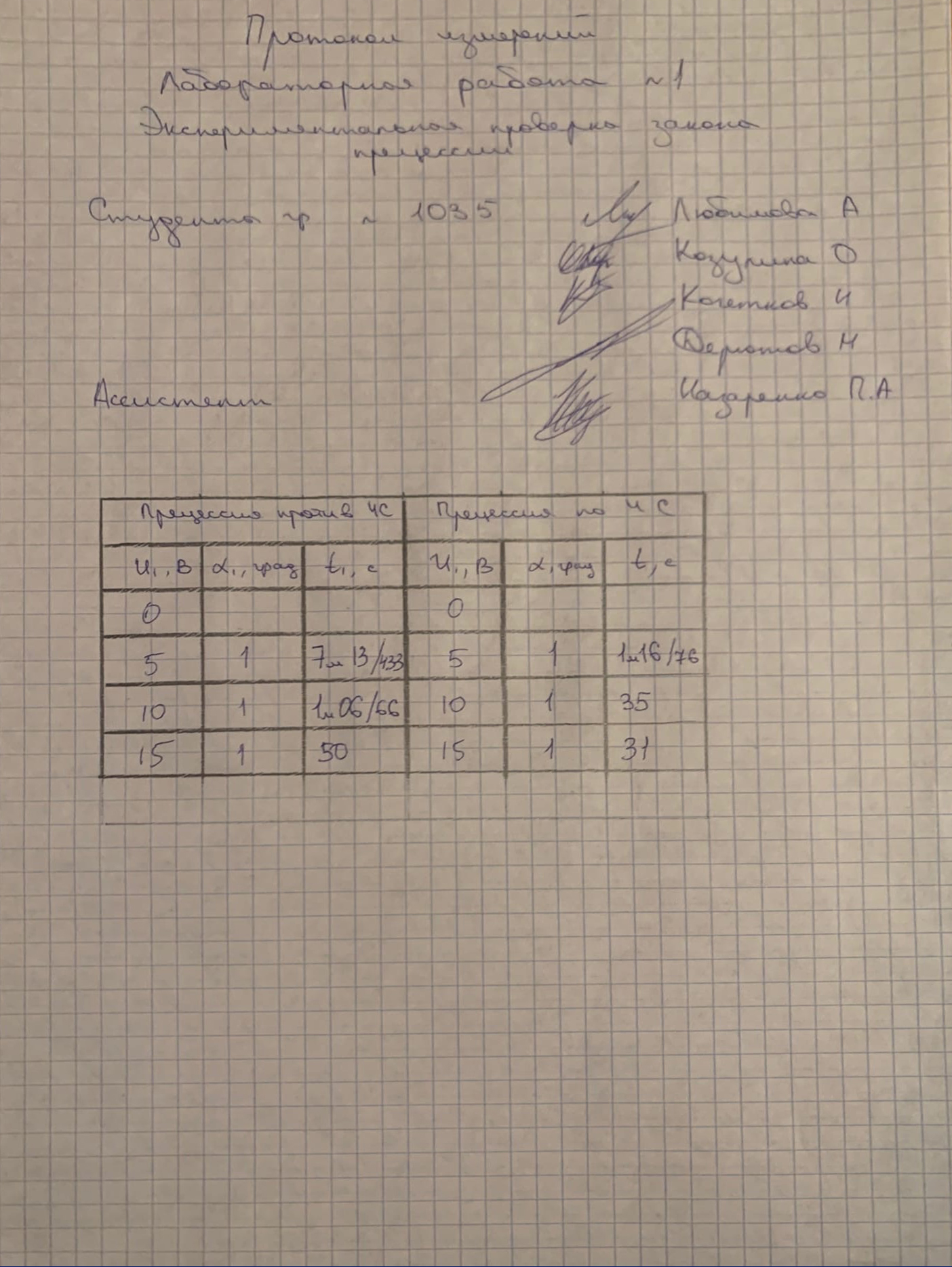 ВВЕДЕНИЕ Целю работы является экспериментальная проверка закона прецессии, заключающаяся в установлении соответствия между угловой скоростью дрейфа трехстепенного гироскопа и воздействующим на него внешним моментом при различных значениях утла отклонения внутреннего карданова кольца от своего начального положения. Прецессия – вращательное движение гироскопа с тремя степенями свободы в инерциальном пространстве под действием постоянного внешнего момента. Закон прецессии, проверяемый в данной работе, можно описать с помощью следующей формулы:  (1) (1)где,  – угловая скорость прецессии гироскопа относительно его наружной оси подвеса; – угловая скорость прецессии гироскопа относительно его наружной оси подвеса; MB – момент, приложенный к внутренней рамке гироскопа; JΩ – кинетический момент; β0 – угол отклонения внутренней рамки Если на гироскоп действует постоянный внешний момент относительно внутренней оси, то он прецессирует относительно наружной оси подвеса. При воздействии внешнего момента относительно наружной оси гироскоп прецессирует относительно внутренней оси. Для расчёта момента, приложенного к внутренней рамке гироскопа можно воспользоваться данной формулой:  (2) (2)1 Описание лабораторной установки Экспериментальная проверка закона прецессии производится на лабораторном макете трехстепенного гироскопа, принципиальная схема которого приведена на рисунке 1. 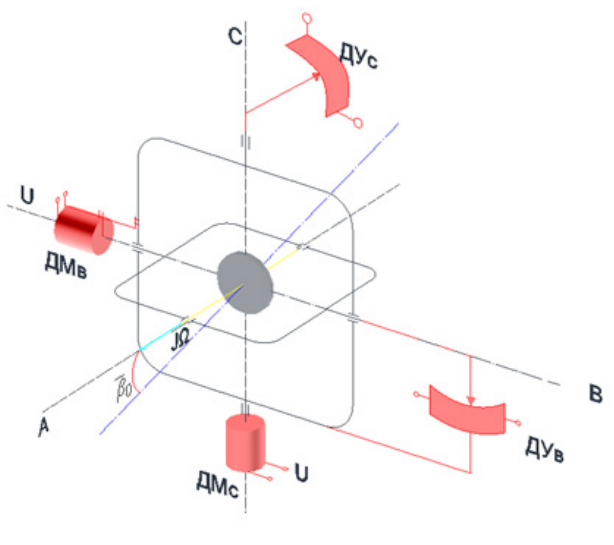 Рисунок 1 ‒ Принципиальная схема трёхстепенного гироскопа По внутренней и наружной осям подвеса гироскопа установлены датчики углов ДУВ и ДУС и датчики моментов ДМВ и ДМС. Датчики угла служат для выдачи информации об углах β и α поворота гироскопа относительно осей подвеса в виде электрических напряжений, величины которых пропорциональны углам β и α. Датчики ДУВ и ДУС запитываются постоянным напряжением 27 В. При подаче переменного электрического напряжения на датчики моментов ДМВ и ДМС последние прикладывают относительно соответствующих осей гироскопа внешние возмущающие моменты, величины которых зависят от величин, а направления – от фаз, подаваемых на датчики напряжений. Управление лабораторным макетом производится с пульта управления, представленным на рисунке 2. На пульт подаются сигналы с датчиков углов ДУВ и ДУС макета. 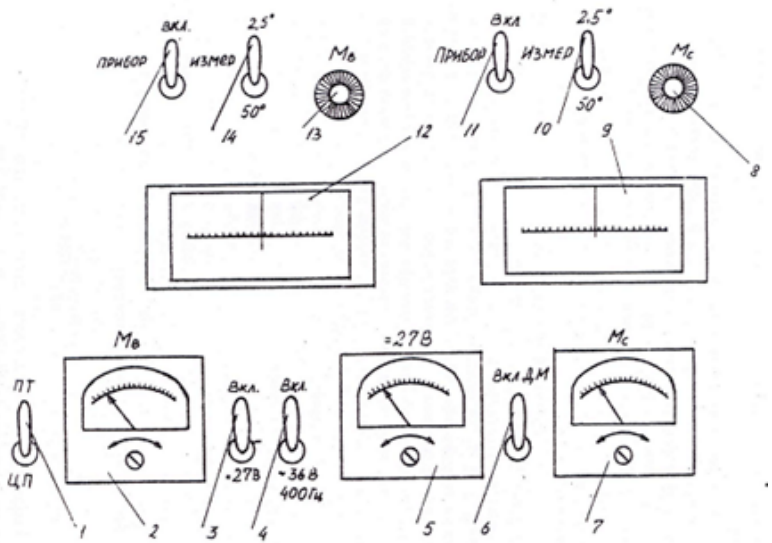 Рисунок 2 ‒ Пульт управления лабораторным макетом где, 1 – тумблер для подачи переменного напряжения 36 В, 400 Гц на пульт от преобразователя тока, или от централизированного источника питания 2 – вольтметр, отображающий величины подаваемого напряжения на ДМВ 3 – тумблер питания потенциометрических датчиков угла ДУВ и ДУС 4 – тумблер подачи переменного напряжения на гиромотор и обмотки возбуждения датчиков моментов ДМВ и ДМС 5 – вольтметр, контролирующий напряжение потенциометрических датчиков угла ДУВ и ДУС (=27В) 6 – тумблер включения датчиков моментов 7 – вольтметр, отображающий величину подаваемого напряжения на ДМС 8 – рукоятка контроля подачи напряжения на ДМС 9 – электроизмерительный прибор, фиксирующий изменение угла β поворота вокруг внутренней оси подвеса 10 – тумблер переключения предела измерения прибора (50° и 2,5°) 11 – тумблер включения прибора 9 12 – электроизмерительный прибор, фиксирующий изменение угла α поворота гироскопа вокруг наружной оси подвеса 13 – рукоятка контроля подачи напряжения на ДМВ 14 – тумблер переключения предела измерения прибора (50° и 2,5°). 15 – тумблер включения прибора 12 2 Результаты проведения экспериментов Данные эксперимента представлены в таблицах 1,2 и на рисунке 3. Таблица 1 ‒ Результаты измерений и вычислений при β=0
Таблица 2 ‒ Результаты измерений и вычислений при β=0
  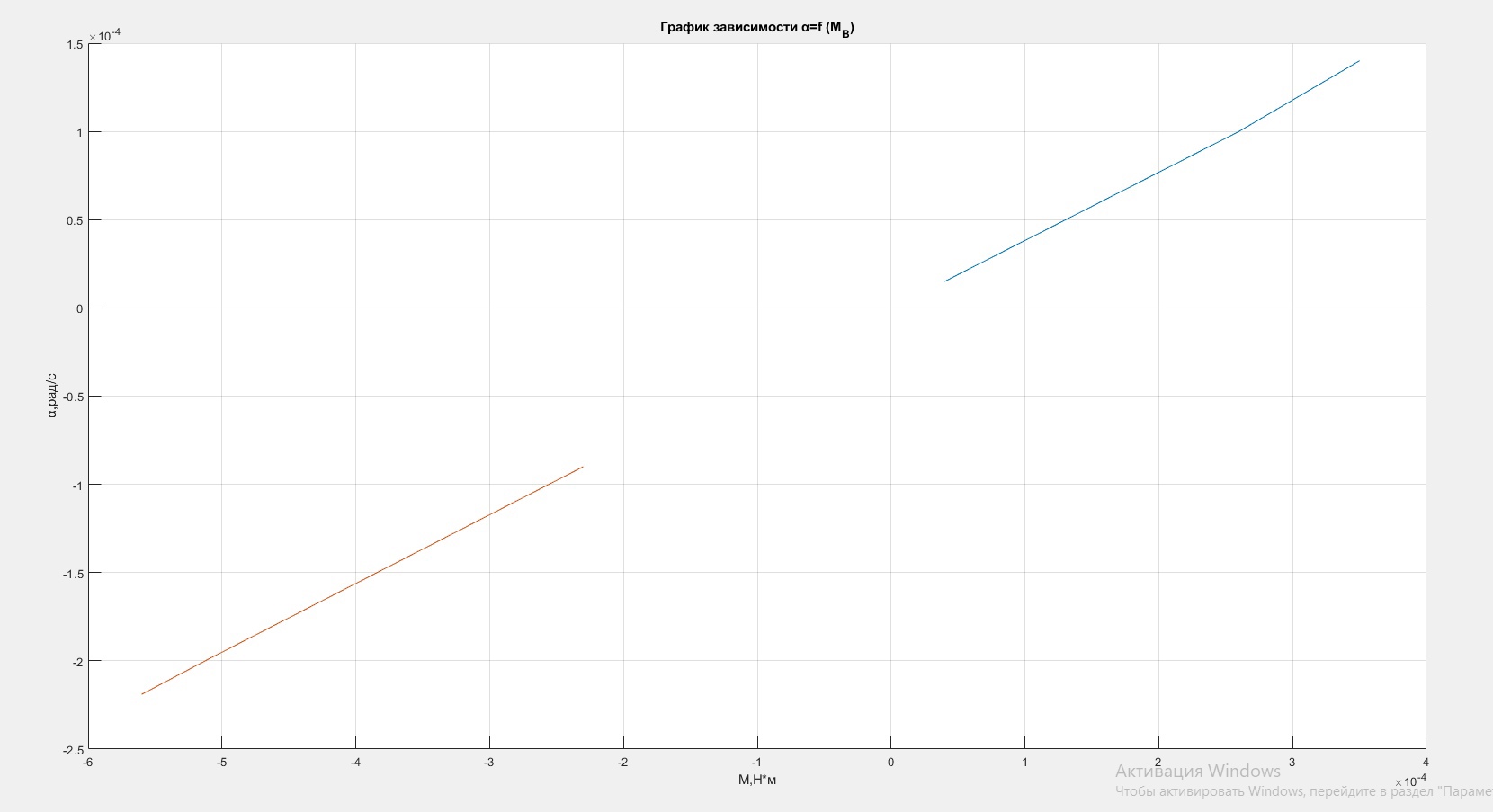 Рисунок 3 ‒ График зависимости α = f (MВ)  ‒ при вращении платформы по часовой стрелке; ‒ при вращении платформы по часовой стрелке;  ‒ при вращении платформы против часовой стрелки ‒ при вращении платформы против часовой стрелки ВЫВОД В данной лабораторной работе была исследована прецессия трёхстепенного гироскопа. По полученным данным при помощи измерений были рассчитаны угловая скорость прецессии и момент, приложенный к внутренней рамке гироскопа. Измерения проводились при β=0. Результаты были сведены в таблицы 1 и 2. Полагаясь на полученные данные эксперимента, был построен график зависимости угловой скорости от момента на оси B, представленный на рисунке 3. Можно наблюдать явно выраженный линейный характер зависимости, что экспериментально подтверждает формулу расчета угловой скорости прецессии гироскопа относительно его наружной оси подвеса и указывает на то, что угол между кольцами карданового подвеса в процессе эксперимента не менялся, что в свою очередь подтверждает закон прецессии. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||