СУХТП. КВ-4. Закон управления это алгоритм или функциональная зависимость, в соответствии с которыми регулятор формирует управляющее воздействие u(t). Эта зависимость может быть представлена в виде u(t) F(x, g, f)
 Скачать 0.72 Mb. Скачать 0.72 Mb.
|

|
Что такое контроллер (автоматический регулятор) и его назначение. Контроллер (автоматический регулятор) — это устройство, с помощью которого в системах управления обеспечивается автоматическое управление поддержание технологической величины около заданного значения. Какую зависимость называют законом управления? Закон управления — это алгоритм или функциональная зависимость, в соответствии с которыми регулятор формирует управляющее воздействие u(t). Эта зависимость может быть представлена в виде u(t) = F(x, g, f) Классификация УУ УУ классифицируют по нескольким признакам (наличие подводимой̆ энергии, вид используемой̆ энергии, вид управляемой̆ величины, характер действия, характер управляющего воздействия, закон управления). 1. По наличию подводимой̆ энергии УУ подразделяют на не имеющие вспомогательный̆ источник энергии (УУ прямого действия) и имеющие тако- вой. У УУ без вспомогательного источника энергии для перемещения управляющего органа используется энергия управляемой̆ среды. Они просты по конструкции, надежны в работе, не требуют внешних источников энергии, но имеют ограниченную мощность для приведения в действие управляющего органа. Такие регуляторы применяют в тех случаях, когда для приведения в действие управляющего органа не требуются большие усилия и для этого достаточно мощности измерительного устройства, а также, если к качеству переходного процесса не предъявляются жесткие требования. У УУ с вспомогательным источником энергии перемещение управляющего органа осуществляется дополнительным приводом, работающим от внешнего источника. Они требуют дополнительной̆ внешней̆ энергии и имеют более сложную конструкцию. Эти УУ (контроллеры) способны обеспечить высокое качество регулирования. 2. По виду используемой̆ энергии УУ делят на гидравлические, электрические и пневматические. В гидравлических УУ для перемещения управляющего органа используется энергия жидкости (обычно трансформаторного масла) под давлением 0,6–0,8 МПа (6–8 кгс/см2), в электрических - электрическая энергия промышленной̆ частоты (в настоящее время наиболее распространены), в пневматических - энергия сжатого воздуха давлением 0,14 МПа (1,4 кгс/см2). 3. По виду управляемой̆ величиной̆ различают УУ температурой̆, давлением, расходом, уровнем, концентрацией̆ и другими величинами. 4. По характеру действия УУ подразделяются на имеющие прямую и об- ратную характеристики. У первых из них возрастание входного сигнала обуславливает увеличение выходной̆ величины, а у вторых - наоборот. 5. По характеру управляющего воздействия можно выделить УУ прерывистого и непрерывного действия. У УУ прерывистого действия непрерывному изменению входной̆ величины соответствует прерывистое изменение управления. В свою очередь УУ прерывистого действия делятся на позиционные и импульсные. У УУ непрерывного действия непрерывному изменению входной̆ величины соответствует непрерывное изменение его выходной̆ величины. 6. По закону управления УУ непрерывного действия делят на интегральные (И), пропорциональные (П), пропорционально-интегральные (ПИ), пропорционально-дифференциальные (ПД) и пропорционально-интегрально-дифференциальные (ПИД). Дать классификацию УУ непрерывного действия по закону управления По закону управления УУ непрерывного действия делят на интегральные (И), пропорциональные (П), пропорционально-интегральные (ПИ), пропорционально-дифференциальные (ПД) и пропорционально-интегрально- дифференциальные (ПИД). Какие значения может принимать выходная величина в двухпозиционном законе управления? Позиционный закон управления (позиционные УУ – Пз-регуляторы) Наибольшее распространение получили двухпозиционные законы управления, у которых выходная величина может принимать только два значения: минимальное или максимальное. Записать в математической форме идеальную характеристику двухпозиционного закона управления. Алгоритм двухпозиционного закона регулирования записывается следующим образом:  Выходная величина двухпозиционного регулятора может занимать только два значения: минимальное (закрыт РО) или максимальное (открыт РО)  Записать в математической форме ПИД-закон управления и указать его параметры настройки. 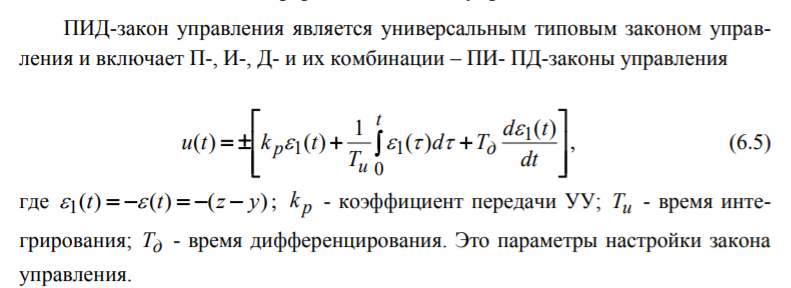 Записать в математической форме ПИ-закон управления.  Представить в виде структурной схемы ПИД-закон управления через типовые элементарные звенья. 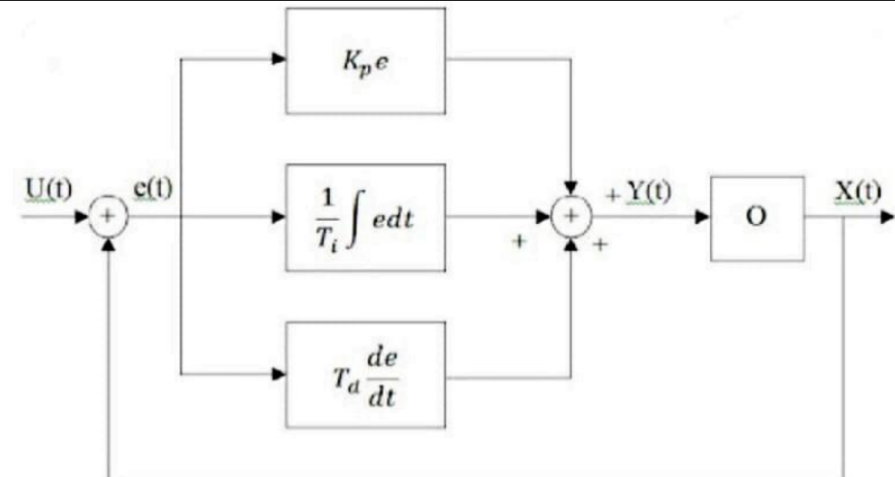 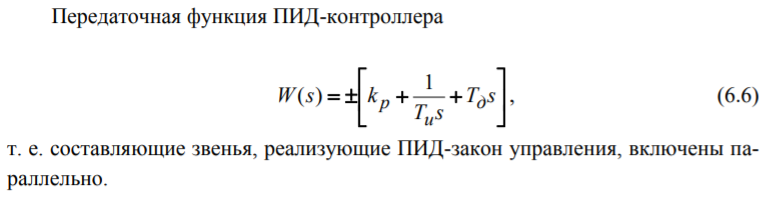 Записать в математической форме переходную характеристику ПИДзакона управления. 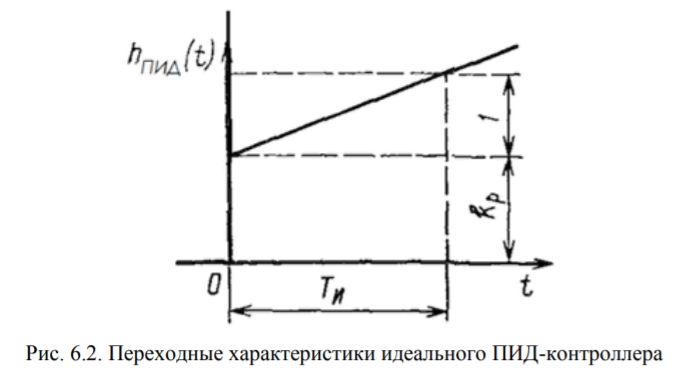 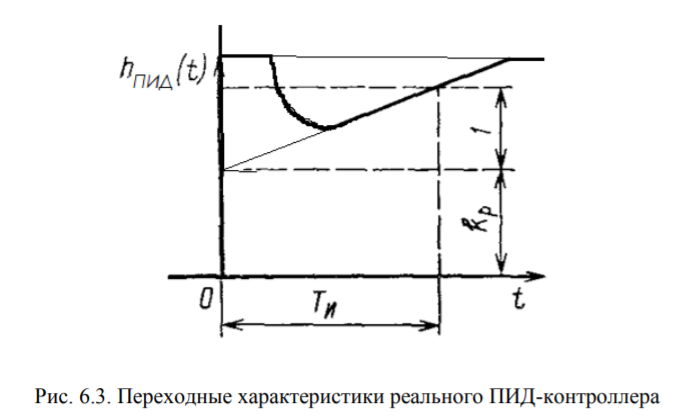 В чем отличие реальной переходной характеристики ПИД-закона управления от идеальной? Отличие реальной переходной характеристики ПИД-закона управления от идеальной состоит в том, что управляющий сигнал u(t) имеет ограничение изменения своей величины (рис. 6.3): Что называется исполнительным устройством (ИУ) и для чего оно предназначено? Устройство систем автоматического управления или регулирования, воздействующее на процесс в соответствии с получаемой командной информацией u(t), называется исполнительным устройством (ИУ). Исполнительное устройство через управляющий орган осуществляет изменение показателей технологического процесса или оборудования в заданных пределах или в заданном направлении. Из каких основных блоков состоит ИУ? К основным блокам исполнительных устройств относят исполнительные механизмы и регулирующие органы. Перечислите основные элементы ИМ. 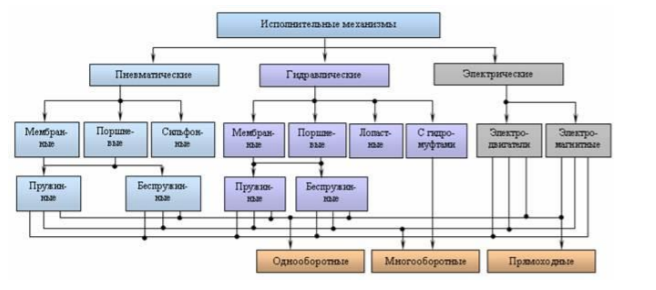 Что такое ТОУ и какими уравнениями он должен быть представлен в САУ? САУ включает в себя ТОУ (ОУ), который является звеном в САУ и должен быть представлен как динамическое звено (или подсистема) и описан дифференциальными, интегральными и/или дифференциально-интегральными уравнениями. Что является наиболее существенным возмущающим воздействием для ТОУ? На ОУ действуют управляющие и возмущающие воздействия. Одним из существенных возмущений является изменение нагрузки объекта. Под нагрузкой объекта понимают количество вещества (или тепла), которое проходит через объект в единицу времени. Так, нагрузкой резервуара является расход протекающей через него жидкости, нагрузкой теплообменника – количество тепла, передаваемого в единицу времени от более нагретого вещества к более холодному. Величина нагрузки определяет размеры аппарата, а также типоразмеры первичных преобразователей и исполнительных устройств АСР. Текущие значения наблюдаемых (управляемых) величин определяют протекание процесса в объекте в данный момент времени. Под влиянием возмущающих и управляющих воздействий управляемые величины изменяются во времени. Число входных величин объекта обычно превышает число выходных. Знание физической природы и диапазона изменения наблюдаемых параметров позволяют обоснованно выбрать измерительные датчики и исполнительные устройства с целью управляющего воздействия на ОУ. Дать классификацию ОУ по количеству выходных величин и по виду математического описания его динамики. По количеству выходных величин 1. Одномерные – одна выходная величина. 2. Многомерные объекты – более одной выходной величин, которые могут быть взаимозависимыми или нет. В многомерных объектах с взаимозависимыми выходными величинами изменение входных величин приводит к одновременному изменению нескольких выходных величин, что объясняется наличием в таких объектах каналов перекрестных связей По виду математического описания динамики 1. Объекты с сосредоточенными параметрами. К ним относятся объекты, управляемые величины которых имеют одно числовое значение в данный момент времени. Эти ОУ описываются обыкновенными дифференциальными уравнениями с постоянными коэффициентами (ОДУ) 2. Объекты с распределенными параметрами. К ним относятся объекты, управляемые величины которых (температура жидкости по длине теплообменника, концентрации компонентов по высоте ректификационной колонны и др.) имеют разные числовые значения в различных точках объекта в данный момент времени. 3. Детерминированные ОУ – определенному значению выходных величин (параметров) соответствует определенные значения входных величин. 4. Стохастические ОУ – определенному значению выходных величин (параметров) соответствует определенное распределение значений входных величин. Что такое многомерный объект? Многомерный объект — объект управления, математическая модель функционирования которого содержит несколько выходных величин. Для многомерного объекта число уравнений вида соответствует числу выходных величин. Многомерные объекты могут быть односвязными и многосвязными. Что такое многосвязный объект? Многосвязный объект — объект управления, в котором хотя бы одна входная величина влияет одновременно на несколько выходных величин. Иначе говоря, выходные величины многомерного многосвязного объекта являются взаимозависимыми, что объясняется присутствием в таких объектах перекрестных связей между параметрами. Перечислите основные свойства ОУ Основные характеристики такого ОУ: коэффициент усиления бесконечно велик; полоса пропускания бесконечно велика; входное сопротивление бесконечно велико; выходное сопротивление бесконечно мало; выходное напряжение равно нулю при нулевом напряжении на входе. Что такое самовыравнивание ОУ, как его рассчитать и как самовыравнивание ОУ связано с коэффициентом передачи ОУ? Самовыравниванием называют свойство устойчивого объекта самостоятельно устанавливаться в равновесное состояние после изменения своей входной величины.  Что такое емкость объекта и как она определяется? Емкость объекта - свойство, присущее всем динамическим объектам. Она характеризует их инерционность – степень влияния входной величины на скорость изменения выходной. Под емкостью С понимают такое изменение входной величины х(t), которое приводит к изменению его выходной величины у(t) на единицу за единичный отрезок времени.  Что характеризует время разгона объекта? Время разгона объекта – время, в течение которого выходная величина объекта у, изменяясь с постоянной скоростью, достигает значения входной величины x. Или, по-другому, время, в течение которого выходная величина объекта у, изменяясь с постоянной скоростью, изменяется на единицу при единичном ступенчатом изменении входной величины Время разгона прямо пропорционально емкости объекта и характеризует его инерционные свойства  Что характеризует постоянная времени объекта? Условной количественной оценкой инерционности объекта является значение постоянной времени объекта (время, в течение которого выходная величина достигла бы постоянного значения, если бы изменялась с постоянной скоростью). Постоянная времени характеризует инерционность объекта, под которой понимается его способность замедленно накапливать и расходовать вещество или энергию, что является возможным благодаря наличию в составе объекта регулирования сопротивлений и емкостей, препятствующих поступлению и выходу этого вещества или энергии. Очевидно, что постоянная времени, имеет место лишь у статических объектов. В чем отличие постоянной времени объекта от времени разгона объекта? Время разгона (τа) - время, в течение которого регулируемая величина изменяется от нуля до заданного значения при мгновенном 100% изменении регулирующего воздействия (скачка) и последующем постоянстве его воздействия. Время разгона является мерой инерционности объекта и увеличивается при увеличении емкости объекта регулирования. Постоянная времени объекта (Т) –это время, в течение которого выходная величина достигла бы своего нового установившегося значения, если бы она изменялась с постоянной скоростью, равной скорости ее изменения в начальный момент времени. Постоянная времени объекта определяет его динамические свойства. Чем она больше, тем медленнее протекает переходный процесс в объекте, и наоборот. Влияние свойства ОУ на выбор его канала управления. Влияние свойств объектов на их регулирование. Свойства объектов оказывают существенное влияние на выбор закона регулирования и качество переходного процесса АСР. Емкость объектов влияет на выбор типа регулятора. Чем она меньше, т. е. чем больше скорость изменения выходной величины объекта при данном изменении нагрузки, тем большую степень воздействия на объект должен иметь регулятор. Влияние самовыравнивания объекта аналогично действию автоматического регулятора. Так, нейтральные объекты, не обладающие самовыравниванием, самостоятельно не обеспечивают устойчивой работы и требуют обязательного применения автоматических регуляторов. Причем, не каждый регулятор может справиться с задачей управления такими объектами. Например, применение интегрального регулятора на нейтральном объекте не позволяет получить устойчивой работы системы. Таким образом, отсутствие самовыравнивания в объектах усложняет задачу регулирования, а его наличие облегчает задачу поддержания выходной величины объекта на заданном значении. Чем выше степень самовыравнивания, тем более простыми методами можно обеспечить требуемое качество регулирования. В некоторых объектах самовыравнивание так велико, что для поддержания постоянного значения выходной величины объекта вообще не требуется установки регулятора. Наличие запаздывания в АСР усложняет задачу регулирования технологической величины в объекте. Поэтому необходимо стремиться к его уменьшению: устанавливать чувствительный элемент и исполнительное устройство системы как можно ближе к объекту регулирования, применять малоинерционные измерительные преобразователи. Чем обусловлена устойчивость объектов ХТС по сравнению с нейтральными и неустойчивыми объектами? Устойчивость ХТС обусловлена наличием обратных связей в сложных химико-технологических системах. Какими физическими параметрами определяется порядок объекта? Параметр — это величина, характеризующая свойство или режим работы объекта. Под объектом здесь понимается как отдельный элемент технической системы, так и вся система в целом. Следует отметить, что параметрами технической системы являются показатели качества и эффективности: производительность, рабочая скорость, грузоподъемность, удельная материалоемкость, удельная энергоемкость, габариты, масса, показатели надежности, показатели качества переходных процессов и др. Эти параметры называют выходными параметрами технического объекта Как определить порядок ОУ, если известно его дифференциальное уравнение?        Какими основными показателями качества управления характеризуется процесс перехода от одного установившегося состояния к другому? Важной оценкой качества является время регулирования или время переходного процесса. Оно характеризует быстродействие САУ и определяется, как время, в течение которого регулируемая величина достигает нового установившегося значения с некоторой заранее установленной точностью ∆. Обычно ∆ принимается равным 5% от (∞): ∆= 0,05ℎ∞ Другим важным показателем качества является перерегулирование , которое существует у апериодических и колебательных переходных процессов и равно отношению разницы первого максимального отклонения управляемой величины от ее установившегося значения к этому установившемуся значению, выраженное в относительных единицах или процентах: 𝜎 = (ℎmax1−ℎ∞)· 100%/ ℎ∞ Для нормально функционирующих САУ 𝜎 = (10 30)%. Прямым показателем качества служит также степень затухания (для колебательных процессов), которая равна отношению разности двух соседних амплитуд колебаний, направленных в одну сторону к первой из них: ƒ = (𝐴1−𝐴2)/𝐴1 Интенсивность затухания колебаний в системе считается удовлетворительной, если φ = 0,75÷0,95. Дополнительными временными показателями качества для колебательных переходных процессов являются время нарастания , время достижения первого максимума m и период затухающих колебаний. Колебательность системы можно оценивать числом переходов управляемой координатой через ее установившееся значение на интервале p ⦁ это число колебаний равное n=tp/Tk. Обычно приемлемым считается n=1,2, иногда допускается 3 или 4 колебания. Для оценки качества колебательных переходных процессов также используют степень затухания т число колебаний. Наряду с прежними прямыми показателями качества: временем регулирования, относительным максимальным отклонением, степенью затухания, числом колебаний, для статических систем важным показателем качества является статическая ошибка (абсолютная и относительная). Абсолютная: 𝑙 = 𝑔 − 𝑥∞, относительная: 𝛿 = 𝑙/g. g – значение регулируемой величины. Для оценки качества применяются определенные интегралы от координат САУ, их производные и комбинации из них. Эти интегралы выбирают так, чтобы с одной стороны они характеризовали качество переходного процесса, а с другой – выражались через параметры САУ. Интегральные оценки не дают возможности непосредственно оценить прямые показатели качества: (время регулирования), (перерегулирование) и т.д. Однако, они дают возможность сравнивать САУ друг с другом и выбирать ту, у которой соответствующая интегральная оценка меньше. Цель использования интегральных критериев заключается в том, чтобы получить общую оценку быстродействия и отклонения регулируемой величины от установившегося значения. |