" Разработка и создание робота пылесоса."
 Скачать 1.12 Mb. Скачать 1.12 Mb.
|

0,60 нмМИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ АВТОНОМНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ "МУРМАНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ" Кафедра АиВТ ОТЧЕТ о прохождении учебной практики по получению первичных профессиональных умений и навыков научно-исследовательской деятельности на тему: " Разработка и создание робота – пылесоса." Выполнил(а) студент АТППб21о-1 Лютый Р.Р. "___"_____________2020г. _________________(подпись) Проверил: старший преподаватель кафедры АиВТ Ерещенко В.В. "___"_____________2020г. _________________(подпись) Мурманск 2022 Содержание Основной целью учебной практики является: приобрести более точные знания и навыки по той специальности, которую выбрал студент. В процессе работы студенту необходимо проанализировать исходные требования, произвести поиск информации, ознакомиться с принципами технологических процессов проектирования автоматизированных систем, спроектировать и собрать модули и компоненты в одну систему. Целью данной работы является разработка и создание робота – пылесоса своими руками на основе платы Arduino nano и других деталей. Для этого были поставлены следующие задачи: изучить, как работает Arduino; понять устройство и принцип работы драйверов для подключения двигателей постоянного тока; научиться работать в программе Flprog; разработать управляющую программу системы; произвести сборку системы; Для создания робота – пылесоса необходимо осуществить выбор компонентов и изделий. Корпус будет состоять из пластика. Для движения робота – пылесоса будут использованы двигатели постоянного тока, а для их движения вперёд, назад и регулирования скорости движения необходимо выбрать микроконтроллер. При выборе микроконтроллера нужно учесть его размеры и количество разъёмов для подключения к нему вентилятора, колёс и ультразвукового датчика. Для моей работы достаточно воспользоваться Arduino nano. Также для освобождения разъёмов я буду использовать регистр, это нужно для того, чтобы можно было подключить дополнительные функции, например микрофон или подсветку. Плата Arduino nano имеет ограничение по силе тока, для всей платы 500 mAh, а для одного выхода 40 mAh, поэтому нельзя подключить на прямую даже маленький двигатель постоянного тока, потому что при включении/выключении двигателя постоянного тока будет создан ток превышающий возможный предел. Поэтому для управления двигателем постоянного тока я буду использовать датчик L298N (рисунок 1). Схема модуля, состоящая из двух H-мостов, позволяет подключать к нему один биполярный шаговый двигатель или одновременно два щёточных двигателя постоянного тока. При этом можно изменять скорость и направление вращения моторов. Управление осуществляется при помощи сигналов ШИМ на командные входы, выполненные в виде штыревых контактов. Технические характеристики L298N Напряжение питания логики модуля: 5 В Потребляемый ток встроенной логики: 36 мА Напряжение питания драйвера: 5 В – 35 В Рабочий ток драйвера: 2 А (пиковый ток 3 А) Габариты: 43.5 мм х 43.2мм х 29.4мм 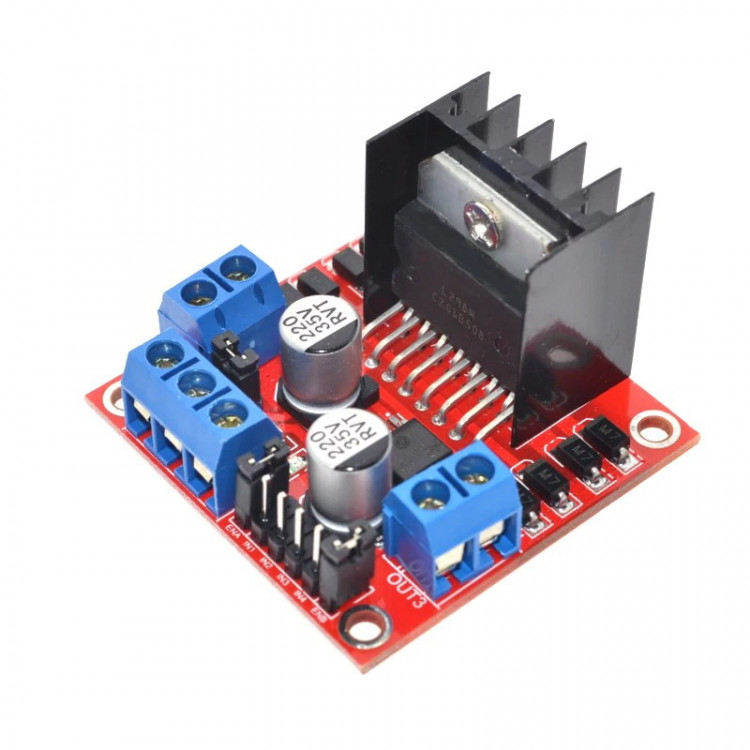 Рисунок 1 – датчик L298N Назначение контактов драйвера L298N (рисунок 2). Напряжение питания подводится на винтовые клемники VSS и GND, выходит напряжение на двигатели с других двух винтовых клемников, расположенных на плате с двух сторон (out1-out4). Для питания двигателей используется контакт VSS, а для питания логики используется контакт Vs. Для подключения первого двигателя постоянного тока отвечают выходы out1 и out2, для подключения второго двигателя, соответственно, out3 и out4. Для регулирования скорости моторов будет использован ШИМ сигнал, который подаётся на контакты EnA и EnB. Подача логического нуля, как правило, запрещает вращение, а единицы – разрешает. Для управления вращением первым двигателем используются выходы In1, In2, а для второго In3, In4. Для вращения щёток будет также использован драйвер L298N. Для настройки движения двигателей я буду использовать программу Flprog. 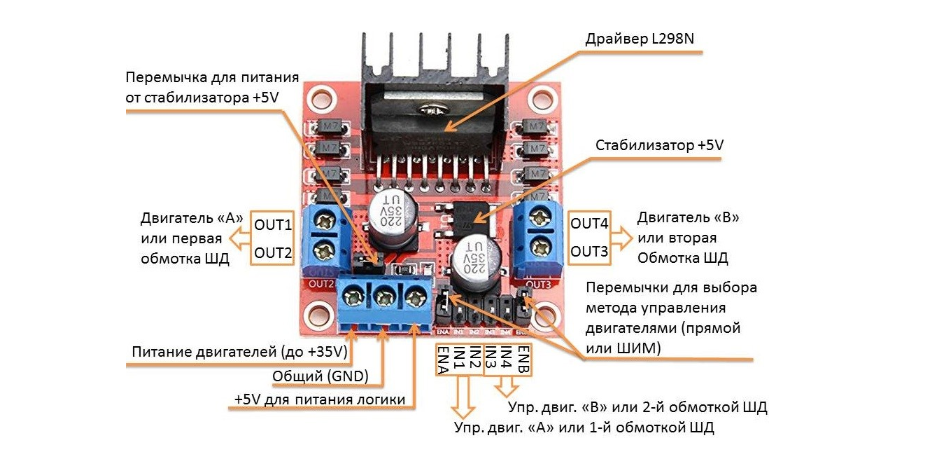 Рисунок 2 – назначение контактов драйвера Схема модуля L298N (рисунок 3) 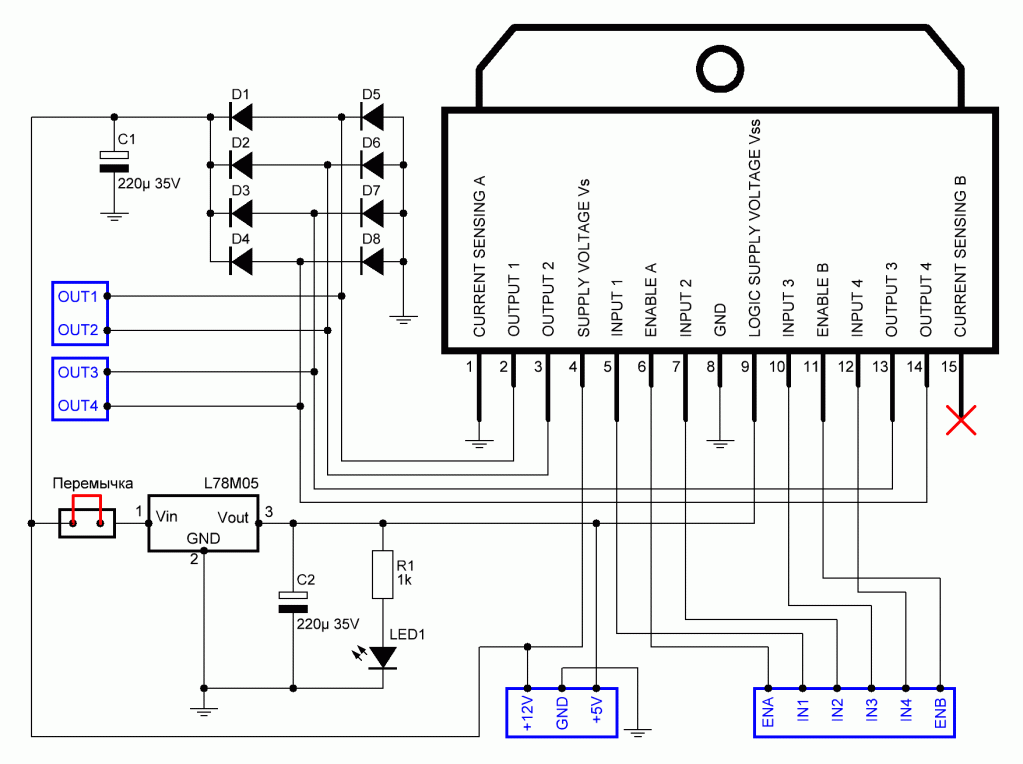 Рисунок 3 – схема модуля L298N 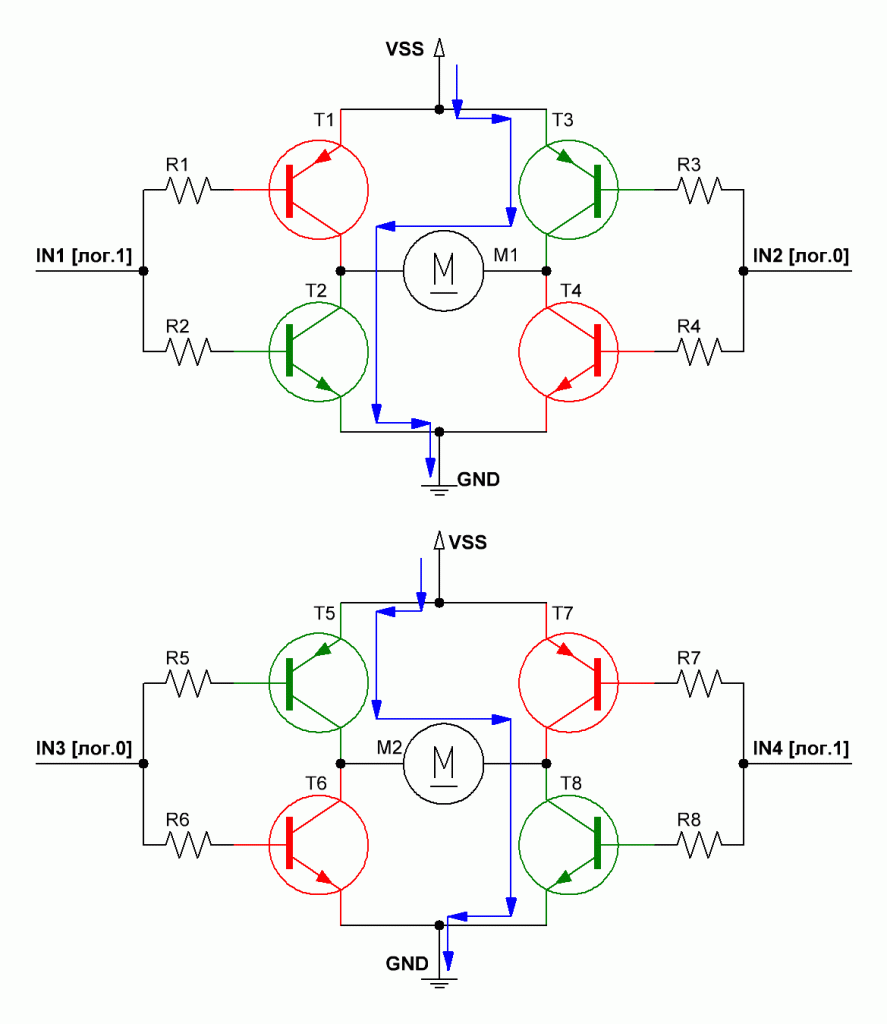 Рисунок 4 – транзисторный мост Н-типа На рисунке 4 изображен транзисторный мост Н-типа. На вход IN1 подаётся логическая единица, а на вход IN2 – логический ноль. Так как транзисторы в схеме моста имеют разный тип проводимости, то при таком входном сигнале транзисторы Т1 и Т4 останутся в закрытом состоянии, в то время, как через транзисторы Т2 и Т3 потечёт ток. Ввиду того, что единственный путь протекания тока лежит через обмотку двигателя, то последний окажется подключен правой клеммой к плюсу питания, а левой к минусу. Всё это приведёт к вращению мотора в определённом направлении. Абсолютно противоположная картина показана на рисунке 5. Здесь IN3 установлен в логический ноль, а IN4 в логическую единицу. Теперь ток течёт в обратном направлении (левая клемма – плюс, правая – минус), заставляя второй двигатель крутиться в противоположную сторону. Рисунок 5 – транзисторный мост Н-типа Характеристики двигателей постоянного тока (рисунок 6): Номинальное напряжение: 3 |

