Задачки САУ. 1. 1 Передаточная функция
 Скачать 0.54 Mb. Скачать 0.54 Mb.
|

|
1.1 Передаточная функция Структурные преобразования . Как правило, по структурной схеме при известных функциях передачи отдельных звеньев требуется найти эквивалентную передаточную функцию (ПФ) некоторого объединения звеньев (объекта, регулятора), либо всей системы в целом. Для этого используют правила преобразования последовательного, параллельного и встречно-параллельного (с обратной связью) соединений. Эквивалентная передаточная функция последовательно соединенных звеньев равна произведению передаточных функций этих звеньев. Считают, что перестановка последовательно включенных по пути сигнала звеньев не влияет на результат, т. е. W1W2 = W2W1. Эквивалентная передаточная функция параллельно соединенных звеньев равна сумме передаточных функций этих звеньев (с учетом знака входа сумматора на пути сигнала). Путь от входа к выходу системы называется прямой связью, от выхода ко входу – обратной связью. Если сигнал на пути меняет знак (обычно на инвертирующем входе сумматора), обратная связь называется отрицательной (ООС), если не меняет знак – положительной (ПОС). Замкнутый путь называется контуром, например, замкнутый контур обратной связи (ЗКОС). Эквивалентная передаточная функция соединения с обратной связью равна дроби, в числителе которой записана ПФ звена на прямом пути, а в знаменателе – единица минус произведение ПФ звеньев по замкнутому контуру обратной связи. Величина  называется определителем ЗКОС. называется определителем ЗКОС.Особенности этого вида соединения звеньев: если в системе есть хоть одна обратная связь, передаточная функция системы будет всегда представлять собой дробь; знак перед произведением ПФ звеньев в знаменателе (в определителе ЗКОС) обычно противоположен знаку обратной связи. Для систем с перекрещивающимися (мостиковыми) связями применяют правило переноса: в переносимую ветвь вводят фиктивное звено с передаточной функцией, равной ПФ потерянного, либо обратной ПФ появившегося при переносе элемента. По Мейсону структурная схема может быть описана целиком, без деления на звенья. Передаточная функция многоконтурной системы образует дробь, числитель которой равен сумме произведений передаточных функций прямых путей на совокупные определители ЗКОС, не касающихся этих путей, а знаменатель – единица минус сумма произведений определителей несоприкасающихся ЗКОС и передаточных функций общих ЗКОС. Следует внимательно относиться к ветвям, которые заходят извне в контур ОС, т.к. они могут образовывать неявные прямые пути по цепям обратных связей. Пример 1. Определить передаточную функцию схемы (рисунок 1.1, а).  Рисунок 1.1 а) б) Видно, что без преобразований нельзя начинать сворачивать схему, в частности, нельзя объединить звенья W2 и W3, как последовательно включенные, из-за связи в точке m. Перенесем ветвь из узла m в узел n (рисунок 1.1, б). исходной схеме на пути от точки m к входному сумматору не было звеньев, преобразующих сигнал, а в новой схеме на пути между теми же точками появляется звено с передаточной функцией W3. Следовательно, в цепь переносимого воздействия нужно ввести фиктивное звено с обратной передаточной функцией, т. е. 1/W3 или W3-1. После переноса начнем свертывание схемы, заменяя каждый раз несколько звеньев одним эквивалентным на основе правил 1-3 и увеличивая границы преобразуемого участка. Промежуточные (вспомогательные) ПФ обычно индексируют римскими цифрами, их используют временно и обязательно заменяют в итоге на ПФ с реально существующими индексами.   Конечный результат всегда представляется в виде простой рациональной дроби и выражается только через исходные передаточные функции. Сигнал не может пройти через одну и ту же точку дважды, поэтому появление в выражении кратных величин вида 2Wi или Wi2 и т. п. является признаком допущенной при преобразованиях ошибки. Пример 2. Определить передаточную функцию схемы (рисунок 1.2). 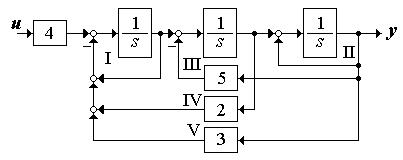 Рисунок 1.2 Применим правило Мейсона. В системе имеются обратные связи, поэтому ПФ представляет собой дробь. Прямой путь от входа u к выходу y только один, его касаются все пять ЗКОС, поэтому в числителе ПФ пишем просто произведение 4/s3. Знаменатель начинаем описывать с несоприкасающихся контуров – контур I не имеет общих точек с контуром III и вложенным в него контуром II, поэтому записываем сначала произведение их определителей. Контур IV соприкасается с контурами I и III, поэтому просто добавляем произведение звеньев по нему 2/s2, но умножаем его на определитель контура II, так как этот ЗКОС не имеет общих точек с IV. И в конце просто добавляем произведение звеньев 3/s3 контура V, поскольку он соприкасается со всеми остальными ЗКОС  Задания для самостоятельного решения. 1.1.1.1 Найти эквивалентные передаточные функции схем (рисунок 1.3).  Рисунок 1.3 а) б) 1.1.1.2 Найти эквивалентную передаточную функцию схемы (рисунок 1.4).  Рисунок 1.4 1.1.1.3 Найти эквивалентную передаточную функцию схемы (рисунок 1.5). 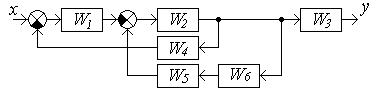 Рисунок 1.5 1.1.1.4 Найти эквивалентную передаточную функцию схемы (рисунок 1.6). 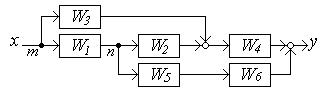 Рисунок 1.6 1.1.1.5 Записать в общем виде главную передаточную функцию системы (рисунок 1.7) 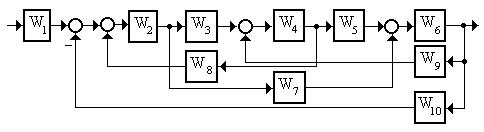 Рисунок 1.7 1.1.1.6 Найти Wuf (s) для системы со структурной схемой (рису- нок 1.8)  Рисунок 1.8 1.1.1.7 Определить передаточную функцию схемы (рисунок 1.9) 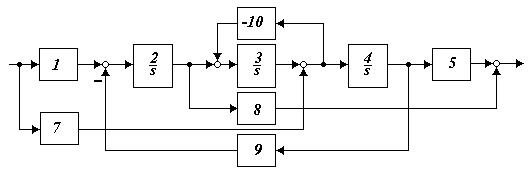 Рисунок 1.9 1.1.1.8Определить замкнутую и разомкнутую передаточные функции относительно выходного воздействия – у по входному воздействию – х для системы автоматического управления со следующей структурной схемой:  1.1.1.9 Определить замкнутую и разомкнутую передаточные функции относительно выходного воздействия – у по входному воздействию – х для системы автоматического управления со следующей структурной схемой:  1.1.1.10Определить замкнутую и разомкнутую передаточные функции относительно выходного воздействия – у по входному воздействию – х для системы автоматического управления со следующей структурной схемой:  1.1.1.11Определить замкнутую и разомкнутую передаточные функции относительно выходного воздействия – у по входному воздействию – х для системы автоматического управления со следующей структурной схемой: 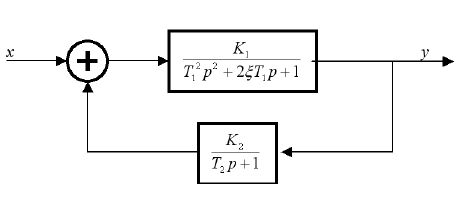 1.1.1.12Определить замкнутую и разомкнутую передаточные функции относительно выходного воздействия – у по входному воздействию – х для системы автоматического управления со следующей структурной схемой: 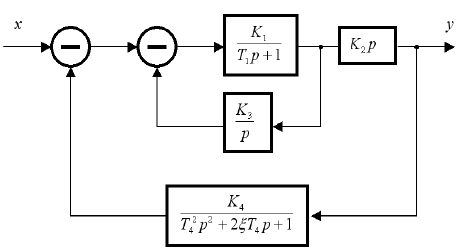 1.1.1.13Найти передаточную функцию замкнутой системы автоматического управления относительно выходного воздействия по входному воздействию для следующей структурной схемы (x – входное, y – выходное воздействия): 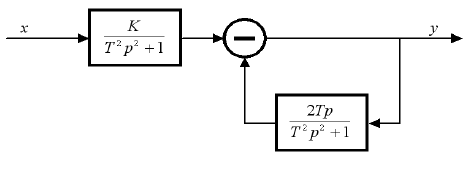 1.1.1.14Определить замкнутую и разомкнутую передаточные функции относительно выходного воздействия – у по входному воздействию – х для системы автоматического управления со следующей структурной схемой: 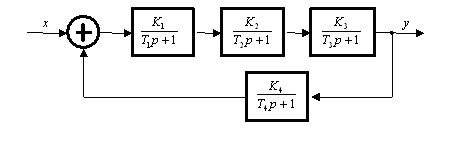 1.1.1.15Определить замкнутую и разомкнутую передаточные функции относительно выходного воздействия – у по входному воздействию – х для системы автоматического управления со следующей структурной схемой: 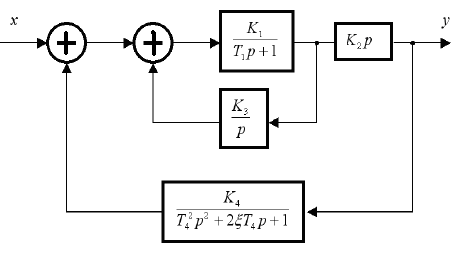 1.1.1.16 Найти передаточную функцию замкнутой системы автоматического управления относительно выходного воздействия по входному воздействию для следующей структурной схемы (x – входное, y – выходное воздействия): 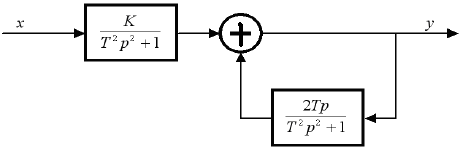 1.1.1.17Определить замкнутую и разомкнутую передаточные функции относительно выходного воздействия – у по входному воздействию – х для системы автоматического управления со следующей структурной схемой: 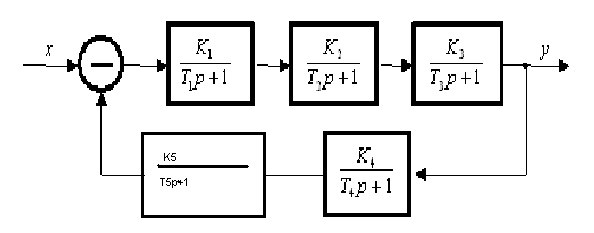 1.1.1.18Определить замкнутую и разомкнутую передаточные функции относительно выходного воздействия – у по входному воздействию – х для системы автоматического управления со следующей структурной схемой:  1.1.1.19Определить замкнутую и разомкнутую передаточные функции относительно выходного воздействия – у по входному воздействию – х для системы автоматического управления со следующей структурной схемой: 1.1.1.20Определить замкнутую и разомкнутую передаточные функции относительно выходного воздействия – у по входному воздействию – х для системы автоматического управления со следующей структурной схемой: 1.1.1.21Определить замкнутую и разомкнутую передаточные функции относительно выходного воздействия – у по входному воздействию – х для системы автоматического управления со следующей структурной схемой: 1.1.1.22Определить замкнутую и разомкнутую передаточные функции относительно выходного воздействия – у по входному воздействию – х для системы автоматического управления со следующей структурной схемой: 1.1.1.23Найти передаточную функцию замкнутой системы автоматического управления относительно выходного воздействия по входному воздействию для следующей структурной схемы (x – входное, y – выходное воздействия): 1.1.1.24Определить замкнутую и разомкнутую передаточные функции относительно выходного воздействия – у по входному воздействию – х для системы автоматического управления со следующей структурной схемой: 1.1.1.25Определить замкнутую и разомкнутую передаточные функции относительно выходного воздействия – у по входному воздействию – х для системы автоматического управления со следующей структурной схемой: 1.1.1.26Найти передаточную функцию замкнутой системы автоматического управления относительно выходного воздействия по входному воздействию для следующей структурной схемы (x – входное, y – выходное воздействия): Задание 2.1 Найти передаточные функции замкнутой системы автоматического управления относительно выходного воздействия по входному и возмущающему воздействиям для следующей структурной схемы (x – входное, y – выходное, f – возмущающее воздействия): 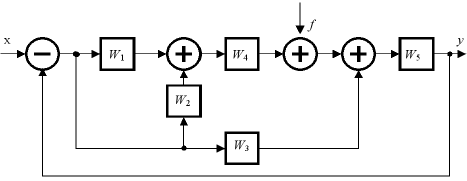 Задание 2.2 Найти передаточную функцию замкнутой системы автоматического управления относительно выходного воздействия по входному для следующей структурной схемы (x – входное, y – выходное воздействия): 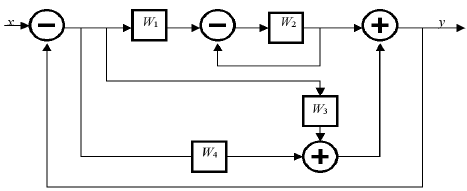 Задание 2.3 Найти передаточные функции замкнутой системы автоматического управления относительно выходного воздействия по входному и возмущающему воздействиям для следующей структурной схемы (x – входное, y – выходное, f – возмущающее воздействия):  Задание 2.4 Найти передаточную функцию замкнутой системы автоматического управления относительно выходного воздействия по входному воздействию для следующей структурной схемы (x – входное, y – выходное воздействия):  Задание 2.5 Найти передаточные функции замкнутой системы автоматического управления относительно выходного воздействия по входному и возмущающему воздействиям для следующей структурной схемы (x – входное, y – выходное, f – возмущающее воздействия):  Задание 2.6 Найти передаточную функцию замкнутой системы автоматического управления относительно выходного воздействия по входному воздействию для следующей структурной схемы (x – входное, y – выходное воздействия):  Задание 2.7 Найти передаточную функцию замкнутой системы автоматического управления относительно выходного воздействия по входному воздействию для следующей структурной схемы (x – входное, y – выходное воздействия): 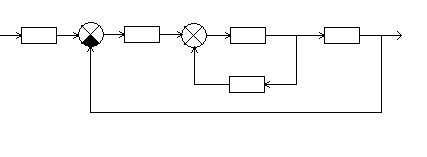 Задание 2.8 Найти передаточную функцию замкнутой системы автоматического управления относительно выходного воздействия по входному воздействию для следующей структурной схемы (x – входное, y – выходное воздействия): 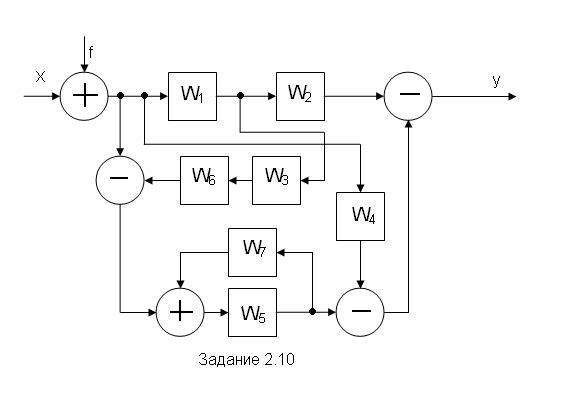 Задание 2.9 Найти передаточную функцию замкнутой системы автоматического управления относительно выходного воздействия по входному воздействию для следующей структурной схемы (x – входное, y – выходное воздействия): 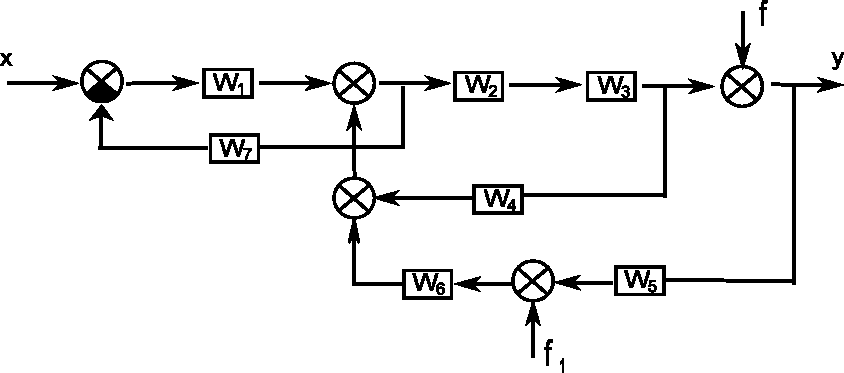 Задание 2.10 Найти передаточную функцию замкнутой системы автоматического управления относительно выходного воздействия по входному воздействию для следующей структурной схемы (x – входное, y – выходное воздействия): 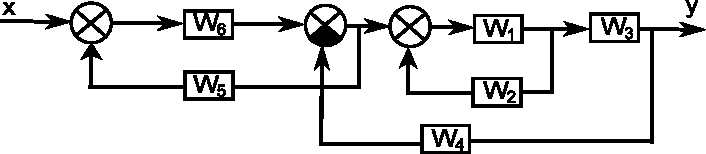 Задание 2.11 Найти передаточную функцию замкнутой системы автоматического управления относительно выходного воздействия по входному воздействию для следующей структурной схемы (x – входное, y – выходное воздействия): 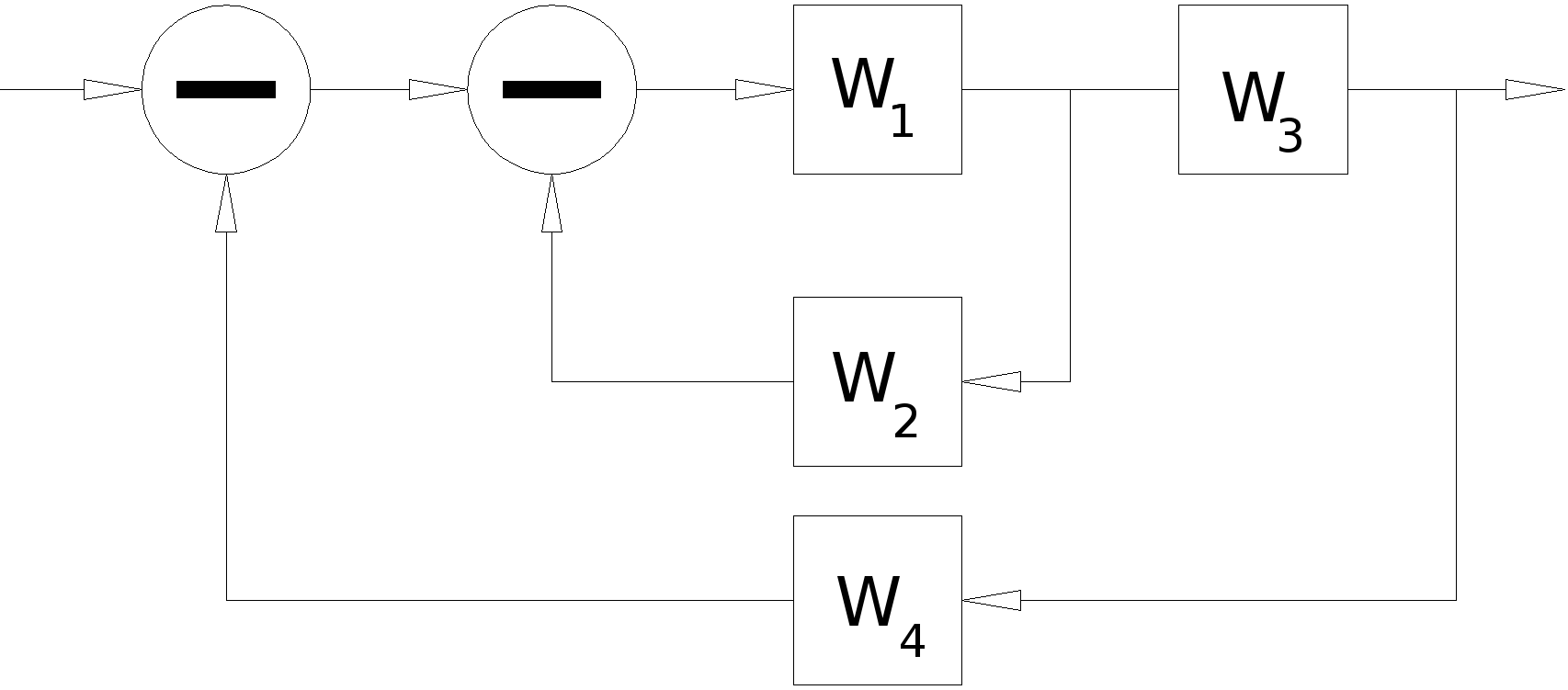 Задание 2.12 Найти передаточную функцию замкнутой системы автоматического управления относительно выходного воздействия по входному воздействию для следующей структурной схемы (x – входное, y – выходное воздействия): 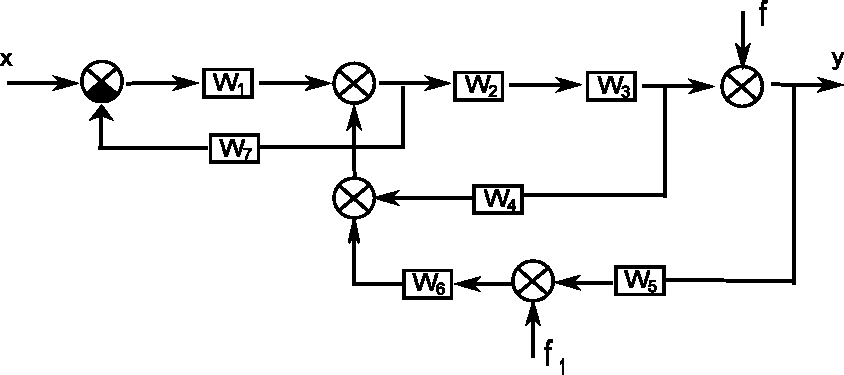 Задание 2.13 Найти передаточную функцию замкнутой системы автоматического управления относительно выходного воздействия по входному воздействию для следующей структурной схемы (x – входное, y – выходное воздействия): Задание 2.14 Найти передаточную функцию замкнутой системы автоматического управления относительно выходного воздействия по входному воздействию для следующей структурной схемы (x – входное, y – выходное воздействия):  Задание 2.15 Найти передаточную функцию замкнутой системы автоматического управления относительно выходного воздействия по входному воздействию для следующей структурной схемы (x – входное, y – выходное воздействия): 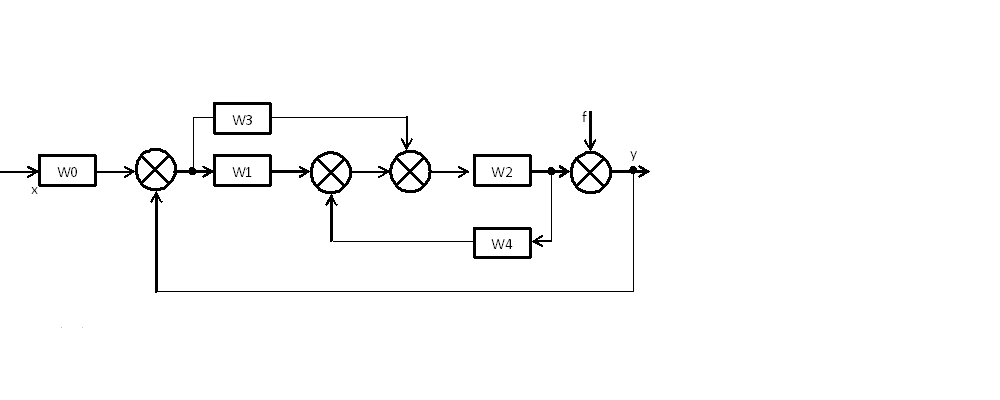 Задание 2.16 Найти передаточную функцию замкнутой системы автоматического управления относительно выходного воздействия по входному воздействию для следующей структурной схемы (x – входное, y – выходное воздействия): Задание 2.17 Найти передаточную функцию замкнутой системы автоматического управления относительно выходного воздействия по входному воздействию для следующей структурной схемы (x – входное, y – выходное воздействия):  Задание 2.18 Найти передаточную функцию замкнутой системы автоматического управления относительно выходного воздействия по входному воздействию для следующей структурной схемы (x – входное, y – выходное воздействия): 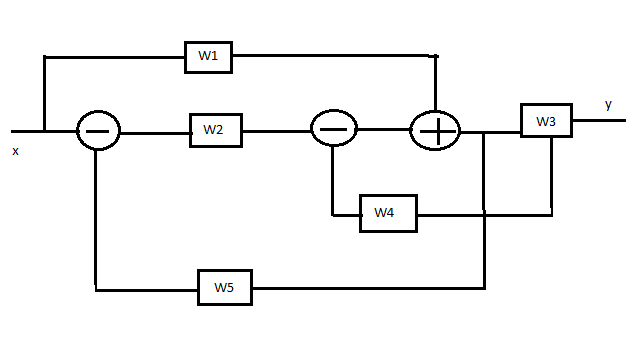 Дифференциальное уравнение Поведение линейных, непрерывных, стационарных систем с сосредоточенными параметрами описывается во времени обыкновенным дифференциальным уравнением (ОДУ) с постоянными коэффициентами ai, bj  где слева – выходная функция y(t) и ее производные (результат), справа – входная функция u(t) и ее производные. Для записи передаточной функции используется комплексная переменная Лапласа s = σ + jω = α + jβ (иногда обозначаемая символом p). Чтобы получить ПФ, достаточно в ОДУ заменить производные d/dt на s в соответствующей степени,отбросить символы функцийu(t) и y(t) и разделить многочлен правой части дифференциального уравнения на многочлен левой части. При нулевых начальных условиях передаточная функция может быть получена и как отношение реакции (выходного сигнала) системы к входному сигналу, записанных в виде изображений по Лапласу. Она может быть записана триадой: корни многочлена числителя (нули), корни многочлена знаменателя (полюса) и общий коэффициент усиления. На комплексной плоскости нули обозначают кружком, полюса – крестиком; общий коэффициент усиления отобразить невозможно и он должен указываться отдельно. При переходе от разомкнутой системы к замкнутой, охваченной общей единичной отрицательной обратной связью (ООС), достаточно к знаменателю ПФ разомкнутой системы добавить ее числитель, чтобы получить ПФ замкнутой системы. Пример 1. Определить передаточную функцию объекта регулирования, модель которого задана дифференциальным уравнением  Сопоставляя производным соответствующую степень s, отбрасывая символы функций x и y и деля многочлен правой части дифференциального уравнения на многочлен левой части, получаем ПФ   Пример 2. При единичном скачке 1(t) на входе реакция звена описывается функцией 2(1 – e–3t)×1(t). Найти передаточную функцию звена. Преобразуем по Лапласу входной и выходной сигналы, пользуясь таблицей соответствия оригиналов и изображений (приложение А). Изображение входного воздействия равно X(s) = 1/s, изображение реакции звена после приведения к общему знаменателю  Здесь единичный скачок не учитываем, хотя он и имеется в исходной функции, так как это просто указание на то, что сигнал на выходе появился скачком. Такое указание может и отсутствовать. Делим изображение реакции на изображение входного воздействия и получаем передаточную функцию звена  Пример 3. Система имеет нуль -3, комплексные сопряженные полюса -2 ± j и коэффициент усиления k = 5. Определить ПФ системы после её замыкания единичной ООС. Передаточная функция разомкнутой системы равна  Добавляя к знаменателю числитель, получаем ПФ замкнутой системы  Задания для самостоятельного решения. Записать передаточную функцию, если объект регулирования описывается дифференциальным уравнением  Записать передаточную функцию, если объект регулирования описывается дифференциальным уравнением  1.1.2.3 Записать передаточную функцию системы с картой нулей-полюсов (рисунок 1.10) и общим коэффициентом передачи k = 1,2 (кратных корней нет). 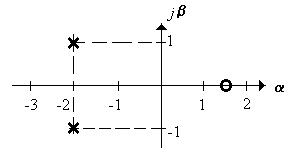 Рисунок 1.10 Представить нулями и полюсами систему с ПФ  1.1.2.5 Представить систему (рисунок 1.11) нулями-полюсами 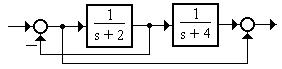 Рисунок 1.11 1.1.2.6 Система имеет нуль -5, две пары комплексных сопряженных полюсов -4 ±3j , -2 ±7j и коэффициент усиления k = 1,5. Определить ПФ системы после её замыкания единичной ООС. 1.1.2.7 Входному воздействию r(t) = 1.2te–t соответствует отклик системы регулирования y(t) = -26e–1,1tt –6e–2tсost . Определить передаточную функцию системы 1.1.2.8 Входному воздействию r(t) = 2te–t соответствует отклик системы регулирования y(t) = -ett –6e–tsint . Определить передаточную функцию системы Представить нулями и полюсами систему с ПФ  Представить нулями и полюсами систему с ПФ  Принципиальная схема Если анализируется принципиальная электрическая схема, передаточная функция составляется с учетом известных закономерностей работы таких схем. Для индуктивных элементов (катушек, дросселей) операторное реактивное сопротивление равно XL = L×s, для емкостных элементов XC = 1/(C×s), где L – индуктивность (Генри), С – емкость (Фарад), s – комплексная переменная Лапласа. В схемах с операционными усилителями (ОУ) учитывают, что инвертирующий вход изменяет знак (полярность) проходящего сигнала. Коэффициент усиления каскада на ОУ равен отношению эквивалентного сопротивления в цепи обратной связи к эквивалентному сопротивлению на входе усилителя. По передаточной функции объекта можно записать дифференциальное уравнение, предполагая, что сокращение одинаковых нулей и полюсов не производилось. По изображению некоторого сигнала можно записать его оригинал. Пример 1. Определить передаточную функцию схемы (рисунок 1.12). Cхема представляет собой делитель напряжения с коэффициентом (R + XC)/(XL + R + XC), поэтому передаточная функция равна  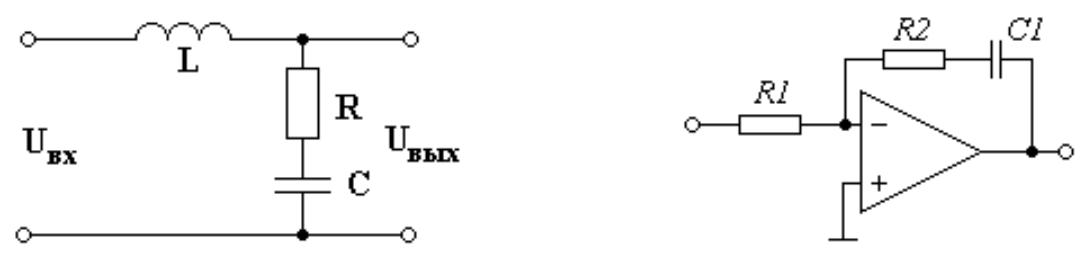 Рисунок 1.12 Рисунок 1.13 Пример 2. Определить передаточную функцию схемы (рисунок 1.13). Эквивалентное операторное сопротивление в цепи отрицательной обратной связи равно сумме  в итоге передаточная функция схемы на инвертирующем операционном усилителе будет равна  Пример 3. Составить структурную схему по дифференциальному уравнению объекта  . Прежде всего уравнение нормируют (делят все коэффициенты на коэффициент a0 при старшей производной левой части), получим . Прежде всего уравнение нормируют (делят все коэффициенты на коэффициент a0 при старшей производной левой части), получим Затем составляют структурную схему, используя блоки интегрирования (т.е. деления на переменную Лапласа s), их число равно порядку системы n (в данном случае трём). С выхода каждого интегратора организуют обратные связи к общему (входному) сумматору с инвертирующим входом, начиная с коэффициента a1 при n-1 производной. С выхода интеграторов организуют связи с коэффициентами из правой части ОДУ к выходному сумматору объекта (если производные здесь отсутствуют, то выходной сумматор не нужен, а блок с коэффициентом b можно поместить и на выходе, и на входе системы, до главного сумматора). Полученная схема показана на рисунке 1.14. 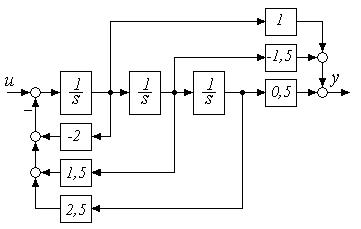 Рисунок 1.14 Пример 4 .Определить порядок объекта, записать его дифференциальное уравнение по передаточной функции   Порядок объекта равен трем. Обозначив в соответствии с индексами передаточной функции выходную величину y(t), входную величину u(t), заменяем комплексную переменную Лапласа производной по времени соответствующего порядка 2y (3) +4y (2) +3y (1) +5y=2u (2) +3u (1) +u . Задания для самостоятельного решения. 1.1.3.1 Найти kуст схемы (рисунок 1.15), если сопротивления резисторов равны 1 кОм, а емкость конденсатора 0,1 мкФ. 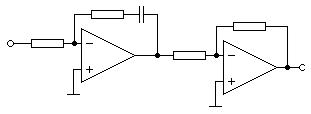 Рисунок 1.15 1.1.3.2 Составить структурную схему системы с ПФ  1.1.3.3 Определить передаточную функцию (рисунок 1.16) 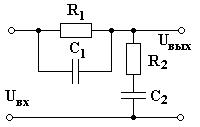 Рисунок 1.16 1.1.3.4 Записать дифференциальное уравнение (рисунок 1.17). Рисунок 1.17 1.1.3.5 Система имеет коэффициент усиления k = 1,25, нуль -5, комплексные сопряженные полюса -1 ± j2, действительный полюс -1. Записать дифференциальное уравнение. 1.1.3.6 Составить структурную схему для системы с ОДУ  1.1.3.7 Составить структурную схему для системы с ОДУ 1.1.3.8 Составить структурную схему для системы с ОДУ Система имеет коэффициент усиления k = 1,25, нуль -1, комплексные сопряженные полюса -1 ± j1.5, действительный полюс -3. Записать дифференциальное уравнение. 1.1.3.10 Составить структурную схему системы с ПФ  |