Шпоры по экзамену ЭНП. ЭНП. 1. Компас и его устройство
 Скачать 4.02 Mb. Скачать 4.02 Mb.
|

|
1. Компас и его устройство. Основными частями компаса являются: котелок 1 с картушкой, нактоуз 2, пеленгатор 3 и девиационный прибор 4. Котелок (рис. 132) представляет собой латунный цилиндрический резервуар, разделенный на две камеры, которые сообщаются между собой. В верхней камере 1 помещается картушка компаса, нижняя 2 служит для компенсации изменения объема компасной жидкости при колебаниях температуры окружающего воздуха. В качестве компасной жидкости употребляется раствор этилового спирта (43% по объему) в дистиллированной воде, замерзающей при температуре —26°С. Для уменьшения колебаний котелка во время качки к нижней части его корпуса прикреплена латунная чашка со свинцовым грузом 3. Котелок снабжен кардановым кольцом, которое позволяет сохранять в горизонтальном положении азимутальное кольцо котелка. Картушка (рис. 133)—главная часть компаса, состоит из системы магнитных стрелок 1, поплавка 2, агатовой топки 3, винта для крепления топки 4, шести кронштейнов 6, поддерживающих слюдяной диск 5, на который наклеивается бумажный диск, разделенный на румбы и градусы 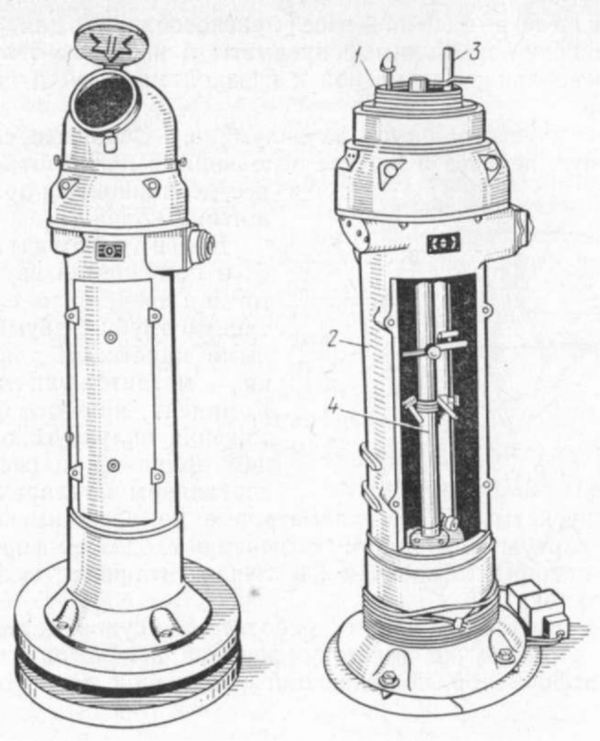 Рис. 131. 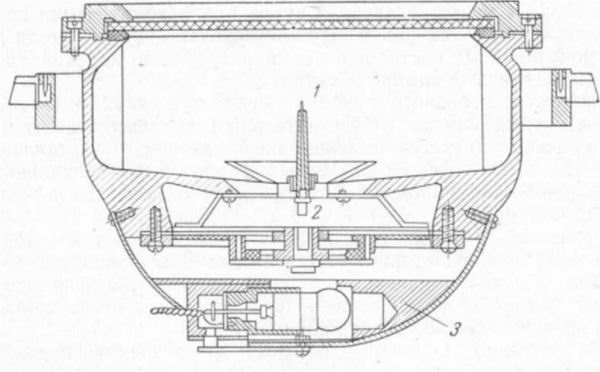 Рис. 132. Пеленгатор — специальное приспособление для определения направлений на видимые предметы и небесные тела. Он состоит из основания, предметной и глазной мишеней и чашки для дефлектора. Нактоуз изготовляется из силумина. Основные части нактоуза: корпус, верхнее и нижнее основания, амортизирующий подвес, девиационный прибор и защитный колпак. 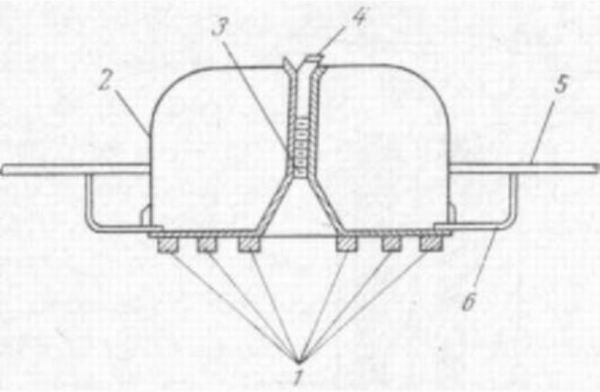 Рис. 133. Девиационный прибор помещается внутри нактоуза и представляет собой латунную трубу с двумя подвижными каретками для установки магнитов-уничтожителей. Комплект магнитов для уничтожения полукруговой девиации придается в специальном деревянном футляре. Все выпускаемые 127-миллиметровые компасы имеют донное освещение картушки. В систему освещения входят: умформер, блок питания и патрон с лампочкой (в случае питания от судовой сети постоянного тока). Система освещения может работать на судовом переменном токе, но в этом случае вместо умформера в цепь питания включается трансформатор, понижающий напряжение тока до 6,12 или 24 в. 2. Устройство котелка и картушки магнитного компаса. Картушка (рис. 133)—главная часть компаса, состоит из системы магнитных стрелок 1, поплавка 2, агатовой топки 3, винта для крепления топки 4, шести кронштейнов 6, поддерживающих слюдяной диск 5, на который наклеивается бумажный диск, разделенный на румбы и градусы. Котелок (рис. 132) представляет собой латунный цилиндрический резервуар, разделенный на две камеры, которые сообщаются между собой. В верхней камере 1 помещается картушка компаса, нижняя 2 служит для компенсации изменения объема компасной жидкости при колебаниях температуры окружающего воздуха. 3. Устройство нактоуза магнитного компаса и предназначение его составляющих Нактоуз компаса изготовлен из силумина (сплава кремния с алюминием) и состоит из трех частей: верхнего основания, корпуса и нижнего основания. В верхнее основание помещается котелок, и поэтому оно оснащено амортизационным подвесом. Оно приспособлено также для установки в нем мягкого железа, с помощью которого уничтожают четвертную девиацию. В корпусе нактоуза находится девиационный прибор в виде полой латунной трубы с двумя одинаковыми по конструкции подвижными каретками. Каретки могут нести по два горизонтальных магнита, служащих для компенсации сил. В одной из кареток устанавливаются продольные магниты, а в другой – поперечные. Для правильной ориентировки кареток относительно ДП нактоуза, а значит и судна, на поверхности трубы прибора проточены направляющие пазы, а каждая из кареток имеет направляющий штифт. Каретки взаимозаменяемы и легко разбираются Магниты-уничтожители закрепляются в гнездах кареток с помощью прижимных винтов, а сами каретки закрепляются в нужном месте трубы девиационного прибора стопорными винтами. На поверхности трубы имеется шкала, пользуясь которой фиксируют положение кареток с магнитами по высоте. Внутри трубы подвешивается на медном тросике вертикальный магнит для уничтожения креновой девиации. Конец тросика намотан на горизонтальный валик, расположенный над верхним концом трубы. Вращая валик, можно поднимать или опускать креновой магнит. Валик снабжен стопорным винтом и шкалой, позволяющей фиксировать положение кренового магнита по высоте. Для доступа к девиационному прибору в корпусе нактоуза вырезано прямоугольное отверстие, закрываемое крышкой. Нактоуз приспособлен к установке внутри его компенсатора электромагнитной девиации. С этой целью в корпусе укреплена опорная крестовина с кольцевым приливом и прорезаны отверстия для проводки кабелей компенсатора. Нижнее основание нактоуза – полая фланцевидная деталь с отверстиями для болтов, с помощью которых нактоуз крепится к палубной подушке. Сверху нактоуз закрывается защитным колпаком. 4. Основные понятия о гироскопе. Свободный гироскоп Все гироскопы имеют: - ротор (камеру с ротором) - привод (для придачи гироскопу вращения) - датчик угла (для слежения за угловым положением гироскопа) - устройство для наложения корректирующего момента. Если центр тяжести гироскопа совпадает с точкой подвеса, то гироскоп называется уравновешенным, или астатическим, если не совпадает, - то тяжелым. Ось перпендикулярная плоскости вращения ротора называется главной или собственной осью вращения гироскопа. Взаимно перпендикулярные оси, лежащие в плоскости вращения ротора, называются экваториальными. Гироскопом, используемым в навигационных приборах, называется динамически симметричный быстро вращающийся маховик или ротор с такой системой подвеса, которая обеспечивает его вращение относительно некоторой точки или оси. Свободный гироскоп – уравновешенный гироскоп, на который не действуют моменты внешних сил (моменты трения, моменты от токоподводящих устройств, моменты корректирующих устройств и т. п.). 5. Основные свойства свободного гироскопа. Гироскопический момент - основные свойства трехстепенного свободного гироскопа: Устойчивость – способность сохранять неизменным в пространстве направление главной оси при любых перемещениях прибора или ударном воздействии. - Прецессия – движение главной оси гироскопа в плоскости, перпендикулярной направлению действия внешней силы. Такое прецессионное движение происходит тем медленнее, чем быстрее вращается вокруг главной оси сам гироскоп. Гироскопический момент. Если на гироскоп действуют дополнительные силы, которые, с одной стороны, уравновешиваюn приложенную к гироскопу силу, а с другой - заставляют гироскоп двигаться в направлении, перпендикулярном направлению главной оси. Моменты этих сил получили название - моменты гироскопической реакции или гироскопические моменты. По своей природе гироскопические моменты есть моменты сил инерции, возникающие при попытке изменить плоскость вращения ротора гироскопа. 6. Устройство и принцип действия жидкостного успокоителя ГК. Погашение незатухающих колебаний гироскопа с помощью жидкостного успокоителя. В силу ряда объективных и субъективных причин основная ось гироскопа имеет колебания, отрицательно влияющие на работу гиросистемы. Гирокомпас, имеющий значительные колебания главной оси гироскопа для практического использования непригоден. Для устранения или максимальной компенсации колебаний основной оси гироскопа к камере ЧЭ с северной и южной стороны прикрепляется два сообщающихся сосуда с жидкостью. Такое устройство получило название жидкостной успокоитель. Период перетекания жидкости должен быть равен периоду незатухающих колебаний оси гироскопа. Проблема своевременного перетекания жидкости решается методом подбора вязкости жидкости и сечения трубки соединяющей сосуды. 7. Гиросфера ГК. Устройство, назначение, принцип действия гиросферы. Гиросферой называется чувствительный элемент имеющий форму сферы.  Гиросфера (ГС) состоит из двух латунных частей: нижней - большой и верхней – малой, спаянных между собой. Гиродвигатели - трёхфазные электродвигатели с внутренним статором и внешним вращающимся ротором. Гиродвигатели расположены под углом 900 друг к другу и соединены шарниром позволяющим им разворачиваться синхронно друг другу на одинаковые углы. Центр тяжести подвесов гиродвигателей смещен вниз, что превращает гиросферу в гирокомпас. Жидкостной успокоитель состоит из кольцевого желоба - трубки частично заполненного силиконовым маслом. Внутренние перегородки делят его на два сосуда – северный и южный сосуды. Центрирующие катушки (катушки электромагнитного дутья) предназначены для создания электромагнитного поля предотвращающего касание гиросферы со следящей сферой. 8. Следящая сфера ГК. Устройство, предназначение. Следящая сфера (СС) обеспечивает подвес чувствительного элемента и подвод к нему рабочих напряжений. (Рис. 14) Следящая сфера состоит из верхней и нижней алюминиевых полусфер. Следящая сфера снабжена двумя полярными электродами, расположенными против соответствующих полярных электродов гиросферы. Третий электрод, соответствует экваториальному электроду чувствительного элемента. При повороте чувствительного элемента на электродах создается напряжение, которое после усиления подается на электродвигатель, поворачивающий следящую систему вслед за гиросферой так, чтобы напряжение было бы равно нулю. В нижнюю полусферу следящей сферы наливают немного ртути. Этим обеспечивается надежный электрический контакт между нижними полярными шапками ГС и следящей сферы, предотвращается касание нижней части ГС со следящей сферой. 9. Следящая система ГК. Состав, предназначение и принцип действия следящей системы. Следящая система предназначена для отработки угла рассогласования (курса) между гиросферой и следящей сферой, для передачи угла рассогласования (курса) в репитерную систему и для подвода питающих напряжений к чувствительному элементу. Следящая система состоит из: - следящей сферы - датчика сигнала рассогласования - усилительного трансформатора - исполнительного двигателя 10. Структурная схема ГК «Амур». Предназначение узлов и блоков, согласно структурной схемы.  Датчик сигнала рассогласования преобразует угол рассогласования между гиросферой и следящей сферой в электрический сигнал рассогласования. Усилительный трансформатор предназначен для усиления электрического сигнала рассогласования до уровня, обеспечивающего устойчивую работу исполнительного двигателя. Исполнительный двигатель предназначен для преобразования электрического сигнала рассогласования во вращательное движение ротора 11. Основной прибор ГК «Амур». Основной прибор состоит из двух узлов: - компасной секции - основания В основании прибора 1–АМ вмонтированы: - пусковое устройство - предохранители - клемные платы - трансформаторы В компасную секцию входят следующие узлы: - чувствительный элемент - стол со следящей сферой - нактоуз с кардановым подвесом - резервуар для поддерживающей жидкости - вентилятор - контрольные приборы сигнализации и освещения 12. Периферийные приборы ГК «Амур». Периферийные приборы включают в себя: - агрегат питания- АМГ-202 - курсограф- (23 АМ) - репитеры для пеленгования- (19 К), (33 К) - путевой репитер- (19 Р) - планшет - корректор с таблицами углов. 13. Приборный стол ГК «Амур», предназначение, узлы и детали ГК смонтированные на столе. На рисунке 5 показана конструкция стола с его компонентами Рис. 5 Компоненты и конструкция стола Стол содержит следующие элементы:  на верхней стороне: следящий привод с 360-градусной шкалой курса 1; кронштейн подвеса с элементами контроля 2; блок электроники РСВ и шкала регулировок освещения 3; шаговый мотор с зубчато-ременной передачей 7; дополнительный сельсин-датчик (только в варианте NG 0020) 8 или sin/cos потенциометр 8 дополнительно в МОD варианте. на нижней стороне стола: соединительный разъем с кабелем 4; маятниковое соединение (маятниковый шарнир), с фланцем 5 с наружной сферой, включающей гиросферу 6. 14. Агрегаты питания ГК «Амур», устройство и назначения. Агрегат питания АМГ-202. – является преобразователем трёхфазного переменного тока с частотой 50 Гц. в трёхфазный переменный ток с частотой 500 Гц. В агрегате предусмотрены стабилизация выходной частоты и автоматический пуск. Агрегаты выпускаются в двух исполнениях: - АМГ-202А - напряжение питания 380 В - АМГ-202Б - напряжение питания 220 В 15. Репитеры ГК «Амур». Устройство, предназначение, принцип работы. Репитеры для пеленгования (19К, 33К) Репитер является прибором, повторяющим показания гирокомпаса при помощи самосинхронизирующейся синхронной передачи (ССП). Данный репитер предназначен для взятия с помощью пеленгатора компасных пеленгов наземных предметов, небесных светил, а также для снятия курсовых углов. В репитере помещается сельсин СС-150, связанный электрически с датчиком курса ДИ-150, расположенным на столе основного прибора. Репитер состоит из: - корпуса со стеклянным смотровым окном - сельсина СС-150 - картушки точного отсчета - картушки грубого отсчета - кинематического механизма связывающего картушки и сельсин - трансформатора освещения и 3-х осветительных лампочек - механизма для согласования репитера вручную Репитер устанавливается на карданов подвес пелоруса. 16. Пелорус ГК «Амур». Устройство, предназначение. Пелорус служит для подвеса репитера. Он представляет из себя полую колонку имеющую в верхней части карданов подвес. Колонка состоит из двух частей. Внутри колонки укреплена коробка с клемными платами и реостат регулирующий силу накала ламп подсветки. 17. Курсограф ГК «Амур». Устройство, предназначение. Курсограф (23 АМ). Курсограф служит для автоматической записи курса судна. Смонтирован в коробке закрывающейся крышкой. В верхней части крышки имеется круглое застекленное окно, через которое видна неподвижная шкала, разбитая на 3600 и вращающийся указатель в форме кораблика. Против носа кораблика снимается отсчет курса. В нижней части крышки имеется квадратное застеклённое окно. Через него можно наблюдать на бумажной ленте кривую курсов на которых лежало судно последние 2-3 часа. Прибор состоит из двух самостоятельных узлов работающих совершенно раздельно. Первый – воспроизводит все изменения курса и записывает их на бумажной ленте. Второй – лентопротяжный механизм. Согласование показаний курсографа с основным прибором производится вручную при отключенных двух фазах обмотки статора принимающего электродвигателя, для чего в линию электродвигателя включен размыкатель. 18. Планшет – корректор ГК «Амур». Устройство, предназначение. Планшет - корректор с таблицами углов. В комплект гирокомпаса «Амур-2» входит планшет- корректор с таблицами поправок на широту, скорость и курс. Для удобства плавания составлено пять таблиц. Они разделены по графическим широтам плавания: - таблица №1 от 400 до 560 - таблица №2 от 560 до 640 - таблица №3 от 640 до 690 - таблица №4 от 690 до 720 - таблица №5 от 720 до 740 Таблицы рассчитаны для скоростей от 4 до 32 узлов через интервалы в 4 узла. Таблицы закладываются в планшет. Сверху кладётся таблица района плавания, лицевой стороной к стеклу. По вертикали, в середине таблицы, обозначены курсы судна, по горизонтали – скорости. С левой и правой стороны таблицы расположены поправки, причем от курсов от 00 до 1800 следует пользоваться левой стороной, от 1800 до 3600 - правой стороной. Величина поправок компасному или истинному курсам определяется пересечением соответствующих линий скорости и курса. Знак поправки к компасному курсу обозначен сверху над значениями курса. Для нахождения истинного курса надо к компасному курсу прибавить поправку с табличным знаком. Для нахождения компасного курса следует из истинного курса вычесть поправку. 19. Лаги. Общие сведения о лагах. История изобретения и развития. Лагами называются приборы, служащие для измерения скорости судна и пройденного им расстояния. Одним из первых устройств для определения скорости корабля был так называемый "голландский лаг". С борта судна бросали в воду какой-нибудь плавающий деревянный предмет (лаг) и замечали промежуток времени, за который этот предмет проходил между двумя наблюдателями, стоявшими на палубе на определенном расстоянии друг от друга. С середины XVI в. к бросаемому за борт деревянному лагу стали привязывать линь (лаглинь) и измерять длину лаглиня, сбегавшего с вьюшки за определенный промежуток времени, который определялся произнесением установленных фаз. Если судно имело слишком малый ход, эти фазы повторялись дважды. Такой способ определения времени практиковался в средние века в монастырях и аббатствах. Специально выделенный монах размеренным голосом читал известные псалмы и молитвы. А необходимое для этого время заранее определялось по солнечным часам. Скорость судна определялась обычно каждые два часа. Винтовой, или вращающийся, лаг был изобретен в 1802 г., однако широкое распространение получил лишь в 1836 г. и просуществовал недолго. Винтовой лаг состоял из вертушки и коробки с часовым механизмом и циферблатом. На циферблате были указаны дробные числа, целые единицы и десятки до ста. Вертушка была соединена с часовым механизмом лаглинем длиной около 19 м. Механический лаг работает следующим образом: за кормою судна с помощью лаглиня буксируется вертушка, вращающаяся под действием на ее лопасти встречного потока воды. Частота вращения вертушки зависит от скорости движения судна. Через лаглинь вращение вертушки передается на счетчик, который показывает скорость и число пройденных судном миль. В последующем появились абсолютные и относительные лаги. 20. Классификация лагов их свойства и краткие характеристики. В зависимости от принципа действия и устройства все лаги подразделяются на: -- относительные -- абсолютные. В настоящее время на судах морского транспортного флота применяются: индукционные, гидродинамические и радиодоплеровские лаги, измеряющие скорость относительно воды. Относительные: Индукционный электронный лаг Принцип работы лага В настоящее время на суда поступает лаг ИЭЛ-2, который является индукционным электронным лагом. Индукционным он называется потому, что его принцип действия основан на законе электромагнитной индукции Фарадея, а электронным - в связи с тем, что его схема собрана из транзисторов, тиристоров и других элементов электроники. Абсолютные лаги. Доплеровский гидроакустический лаг. Принцип работы лага В данной системе в качестве отражающей поверхности выступает грунт (для режима абсолютного лага) или слой воды (для режима относительного лага). 21. Гидродинамические лаги и их комплектация. Независимо от конструктивных особенностей типовой проект гидравлического лага состоит из следующих основных узлов: приемной трубки (двухканальной или одноканальной); клинкета для установки приемной трубки в днище судна; приемника давления или сильфонного аппарата; кранового распределителя с трубопроводами для соединения приемной трубки с приемником давления; центрального прибора лага; приборов—повторителей (репитеров) скорости и пройденного расстояния; станции лага для управления и контроля за работой лага. 22. Гидродинамические лаги и их принцип действия. Действие гидродинамического лага основывается на измерении скоростного напора встречного потока воды.1*  В качестве приемного устройства лага, воспринимающего гидродинамическое давление, служит приемная трубка, опускаемая на днище судна или штевневое устройство. При движении судна уровень в трубке поднимается на некоторую высоту. Давление в динамической линии приемного устройства определяется двумя составляющими: динамической (скоростной напор) и статической. Возникающее при движении судна суммарное давление в приемном устройстве не может быть использовано непосредственно для определения скорости из-за наличия статической составляющей, так как это привело бы к зависимости отсчета скорости от осадки судна. Для исключения влияния осадки на показания лага в конструкции прибора предусмотрена компенсация статического давления с помощью сильфонного аппарата (см. рис. 134). Сильфонный аппарат 1 представляет собой камеру, разделенную диафрагмой 2 на две полости — нижнюю и верхнюю. При работе лага под днище судна опускают приемную трубку 5 с отверстиями 6 и 7. Нижняя полость камеры соединена с каналом приема суммарного давления трубопроводом 8 и с каналом статического давления трубопроводом 4. При движении судна в обе полости сильфонного аппарата поступают давления, действующие друг другу навстречу. Поскольку давления, действующие на диафрагму 2 по направлению противоположны, результирующее давление, испытываемое диафрагмой, будет равно динамической составляющей суммарного давления воды, пропорциональной скоростному напору. К диафрагме прикреплен шток 3, связанный через рычаг со стрелкой указателя скорости. Динамическое давление, приподнимая диафрагму и шток, заставит отклониться стрелку указателя. 23. Сильфонный аппарат гидродинамического лага, его предназначение и устройство. Предназначен для восприятия давления и оказания действия на шток указателя скорости. Сильфонный аппарат 1 представляет собой камеру, разделенную диафрагмой 2 на две полости — нижнюю и верхнюю. При работе лага под днище судна опускают приемную трубку 5 с отверстиями 6 и 7. Нижняя полость камеры соединена с каналом приема суммарного давления трубопроводом 8 и с каналом статического давления трубопроводом 4. 24. Сильфонный аппарат гидродинамического лага, устройство и принцип действия. Сильфонный аппарат 1 представляет собой камеру, разделенную диафрагмой 2 на две полости — нижнюю и верхнюю. При работе лага под днище судна опускают приемную трубку 5 с отверстиями 6 и 7. Нижняя полость камеры соединена с каналом приема суммарного давления трубопроводом 8 и с каналом статического давления трубопроводом 4. При движении судна в обе полости сильфонного аппарата поступают давления, действующие друг другу навстречу. Поскольку давления, действующие на диафрагму 2 по направлению противоположны, результирующее давление, испытываемое диафрагмой, будет равно динамической составляющей суммарного давления воды, пропорциональной скоростному напору. К диафрагме прикреплен шток 3, связанный через рычаг со стрелкой указателя скорости. Динамическое давление, приподнимая диафрагму и шток, заставит отклониться стрелку указателя. 25. Компенсационное устройство гидродинамического лага, предназначение и принцип действия. Как только при движении судна диафрагма сильфонного аппарата отклонится от нейтрального положения, механизм центрального прибора начнет отрабатывать значение скорости, соответствующее определенному гидродинамическому давлению. Одновременно компенсационное устройство центрального прибора, состоящее из коноида, пружины и рычагов, начнет оказывать на диафрагму противодействие. Диафрагма приемного устройства при движении судна постоянно находится под напряжением, что ухудшает работу лага. Металл, из которого сделана диафрагма, «устает», параметры меняются, и в показаниях лага появляется ошибка. Для улучшения работы сильфонного аппарата лаги имеют специальное компенсационное устройство, которое разгружает диафрагму приемника давления, компенсируя гидродинамическое давление. В зависимости от способа компенсации гидродинамического давления гидравлические лаги подразделяются на лаги: -- с механической компенсацией; -- с электромагнитной компенсацией; -- с гидравлической компенсацией; -- без компенсации. 26. Достоинства и недостатки гидродинамических лагов. К данному вектору присоединяется масса ошибок, таких как качка, снос, дифферент и обрастание. Поэтому такие лаги чаще всего показывают ошибочные данные, но при этом довольно просты в изготовлении. Так что являются самыми бюджетными и часто используемыми на судах не поднадзорных сертификационным обществам. - диафрагма частенько изнашивается и требует установки компенсационного устройства 27. Принцип работы доплеровских гидроакустических лагов. В данной системе в качестве отражающей поверхности выступает грунт (для режима абсолютного лага) или слой воды (для режима относительного лага). В днище судна установлена антенна, действующая как излучатель и приемник ультразвуковых колебаний. В сторону дна излучаются ультразвуковые волны в виде узкого пучка под углом к плоскости горизонта. При использовании доплеровского гидроакустического лага и излучатель, и приемник колебаний находятся на судне. 28. Антенные системы доплеровских гидроакустических лагов. Двухлучевые и многолучевые доплеровские лаги. Эффективным способом устранения нелинейной зависимости между сдвигом частоты и скоростью судна является использование двухлучевой антенной системы. По этой схеме акустические сигналы излучаются вдоль диаметральной плоскости судна в сторону носа и кормы под одним и тем же углом Для определения не только продольной, но и поперечной составляющей скорости судна применяют трех-, четырех- или даже шестилучевые доплеровские системы Шестилучевые доплеровские системы, устанавливаемые на крупнотоннажных судах, предназначены не только для навигационных целей, но и для измерения небольших по значению поперечных составляющих скорости носовой и кормовой оконечностей судна, что важно при выполнении швартовных операций. 29. Достоинства и недостатки доплеровских гидроакустических лагов. Практическая реализация однолучевого доплеровского лага связана с рядом трудностей, основными из которых являются нелинейность зависимости от изменение угла при крене, дифференте и на качке. Погрешность, вызванная изменением скорости звука в морской воде, может достигать 4 %, поэтому в большинстве конструкций лагов приняты меры по компенсации или учету погрешности. Глубина – 200-300 метров 30. Индукционные лаги. Принцип действия индукционных лагов. Индукционным он называется потому, что его принцип действия основан на законе электромагнитной индукции Фарадея, а электронным - в связи с тем, что его схема собрана из транзисторов, тиристоров и других элементов электроники. В индукционных лагах источником магнитного поля является специальный электромагнит, роль проводника выполняет морская вода. Электромагнит и измерительные электроды размещаются в устройстве, называемом индукционным первичным преобразователем скорости (ИППС), жестко связанным с корпусом корабля. ИППС устанавливается под днищем корабля таким образом, чтобы магнитное поле, создаваемое электромагнитом охватывало некоторый объем встречного потока воды при движении корабля. Измерив напряжение, возникающее на измерительных электродах от наводимой в воде ЭДС, можно определить скорость перемещения источника магнитного поля относительно воды, т.е. определить относительную скорость корабля. 31. Достоинства и недостатки индукционных лагов. Отпадает необходимость размещать некоторые приборы ниже ватерлинии, появляется возможность определять скорость судна на заднем ходу, повышается надежность системы за счет исключения механических и электромеханических устройств и т. д. Индукционным лагом ИЭЛ-2- можно измерять относительную скорость судна до 30 уз. и пройденное расстояние. Недостатками известных лагов являются низкая точность измерения скорости из-за возникающей на электродах паразит ной трансформаторной помехи, ЭДС которой по величине превышает полезный сигнал, и низкая надежность преобразователей. 32. ТТХ индукционного электронного лага «ИЭЛ – 2М». Технические данные – лаг измеряет скорость вперед от 0 до 30 узлов, скорость назад лаг не измеряет; – инструментальная погрешность 0,2 узла; – в помещении, где установлены приборы лага, допускается перепад температуры от – 10° до + 50° С; инструментальная погрешность при этом может изменяться в пределах 0,35 узла; – питание лага осуществляется однофазным током частотой 50 Гц, напряжением 220 В; – потребляемая мощность составляет 150-200 Вт в зависимости от количества потребителей; – ресурс лага равен 50 000 часов. 33. Состав комплекта индукционного электронного лага «ИЭЛ – 2М». Лаг может устанавливаться на любых судах с неограниченным районом плавания. В качестве чувствительного элемента используется индукционный первичный преобразователь сигнала (ИППС). Часто его называют просто «индукционный преобразователь» (ИП) – прибор 9. Прибор 6 – центральный прибор; предназначен для выработки относительной скорости судна и пройденного им расстояния. Прибор 3 – прибор питания. Прибор 29 – согласующий прибор; предназначен для предварительного усиления сигнала чувствительного элемента и согласования выходного сигнала ИП и входного сопротивления прибора 6. Прибор 59 – трансляционный прибор; предназначен для трансляции информации о скорости в цифровом виде. Прибор 119 – предназначен для преобразования информации о скорости в аналоговый вид и трансляции ее потребителям. Прибор 1 – цифровой индикатор скорости. Прибор 5 – содержит цифровой индикатор скорости и механический счетчик пройденного расстояния. 34. Автоматическое управление судном. Общие понятия о автоматическом управлении. Все суда морского транспортного флота в настоящее время оборудуются системами автоматического управления (САУ) курсом судна. Основным элементом САУ является прибор управления (авторулевой). Авторулевой - прибор, предназначенный для автоматического управления судовым рулевым приводом и, следовательно, автоматически, без участия рулевого матроса, удерживающий судно на заданном курсе. Авторулевой также производит повороты и изменения курса на заданную величину. При правильной настройке авторулевой обеспечивает снижение потерь ходового времени до 3 % за счёт более точного удержания судна на заданном курсе и уменьшения тормозящего действия корпуса и руля. Углы перекладки руля при автоматическом управлении на 20 - 30 % меньше, чем при ручном. Автоматический рулевой работает от основного прибора гирокомпаса. 35. Авторулевой «Печора», составные элементы. Пульт управления. Пульт управления (ПУ) является основным прибором авторулевого, с которого осуществляются все виды дистанционного управления рулём. Станция электроэлементов Станция электроэлементов (СЭ) предназначена для размещения в ней электроэлементов и для удобства разводки кабельных трасс. Рулевой датчик Рулевой датчик (РД) предназначен для выработки сигнала обратной связи от истинного положения руля для электрической схемы авторулевого и для рулевых указателей. Исполнительные механизмы Исполнительные механизмы (ИМ) входят в комплект авторулевых предназначенных для установки на судах с электрогидравлическими рулевыми машинами. 36. Авторулевой «Печора», принцип действия. Авторулевой «ПЕЧОРА» предназначен для стабилизации движения судна на заданном курсе и для плавного изменения курса судна с заданной угловой скоростью поворота. Авторулевой может производить повороты и изменения курса корабля на заданную ему величину. Как только от датчика авторулевого поступает сигнал, рулевой привод перекладывает руль на заданный угол в сторону, которая противоположна уходу корабля с курса. Как только начинает возвращаться на прежний курс, авторулевой отводит руль, а потом, удерживая его, перекладывает руль в сторону, противоположную прежней стороне. 37. Авторулевой «Печора», режимы работы. В авторулевых «Печора» предусмотрены следующие режимы управления: -- автоматический – удержание судна на заданном курсе -- циркуляция – изменение курса судна с заданной угловой скоростью -- следящий – обеспечивающий перекладку руля на угол, пропорциональный углу отклонения рукоятки управления -- простой 38. Основы эхолокации. Виды эхолотов и принципы их работы. Эхолот «Кубань» Навигационный эхолот «Кубань» устанавливается на судах речного флота и предназначен для измерения глубин и записи профиля дна водных бассейнов под днищем судна и под днищем толкаемых составов. Работа эхолота основана на измерении времени прохождения ультразвуковых колебаний в воде от вибратора-излучателя до дна и обратно к вибратору-приемнику. Скорость распространения звука в воде принимается равной 1450 м/сек. Навигационный эхолот НЭЛ- М2 предназначен для измерения индикации и регистрации глубин. 39. Комплектация и предназначение блоков эхолота. В состав эхолота входят: - самописец – прибор 4; - указатель – прибор 4А; - вибратор-излучатель – прибор 1; - вибратор-приёмник – прибор 1; - цифровое табло цифрового указателя глубин (ЦУГ) – прибор 11; - две кабельные коробки – приборы 13; - стойка с электронными блоками – прибор 16; - электронная часть ЦУГ – прибор 16А. Самописец – предназначен для автоматической записи глубины и управления посылкой ультразвуковых импульсов. Указатель – служит для визуального отсчета измеряемых глубин и так же, как самописец, управляет посылками ультразвуковых импульсов Усилитель – предназначен для усиления электрических импульсов, возникающих в обмотке вибратора – приемника в результате колебаний его никелевого пакета под воздействием эхо-сигналов. Прибор 11. Представляет собой цифровое табло и служит для индикации измеренной глубины. Прибор 13 Представляет собой кабельную коробку, предназначенную для соединения прибора вибраторов с электронными блоками. Прибор 16 Предназначен для размещения электронных блоков и связи приборов эхолота между собой Прибор 16А Предназначен для размещения электронных блоков цифрового указателя глубин. 40. Работа эхолота, согласно функциональной схемы. Эхолоты имеют следующие основные части: Вибратор (антенна). Преобразует электрический сигнал в зондирующий импульс (обычно частота импульса 18-25 кГц) и принимает отраженный от грунта сигнал. Может быть установлено два вибратора. В этом случае один вибратор будет являться передающим, а другой приемным; Блок питания. Вырабатывает напряжения, необходимые для работы эхолота. Электронная часть. Формирует зондирующий импульс, измеряет время от момента посылки до прихода эхо-сигнала, преобразует время в расстояние, координирует работу всех блоков; Индикатор. Служит для отображения информации о скорости в удобном для считывания виде; Самописец. Прибор для регистрации глубин на бумаге или дисплее; Сигнализатор глубины. Прибор, подающий звуковой сигнал при выходе на глубину меньше или больше установленной (в зависимости от режима).  Конструктивно вышеперечисленные блоки могут быть выполнены как в виде отдельных блоков, так и объединены в многофункциональные блоки. Рис.1 Блок-схема судового эхолота |