Электромеханические измерительные приборы. 2. теоретические положения
 Скачать 406 Kb. Скачать 406 Kb.
|

|
2. ТЕОРЕТИЧЕСКИЕ ПОЛОЖЕНИЯ 2.1. Принцип действия Электромеханические измерительные приборы (ЭИП) относятся к аналоговым устройствам, показания которых являются непрерывной функцией изменений измеряемой величины. Электромеханические измерительные приборы отличаются простотой, дешевизной, высокой надежностью, разнообразием применения, относительно высокой точностью. Любой ЭИП состоит из ряда функциональных преобразователей, каждый из которых решает свою элементарную задачу в цепи преобразований. Так, простейший электромеханический измерительный прибор прямого преобразования состоит из трех основных преобразователей: измерительной цепи, измерительного механизма и отсчетного устройства (рис. 1).  Рис. 1. Структурная схема электромеханического измерительного прибора прямого преобразования Измерительная цепь обеспечивает преобразование электрической измеряемой величины X в промежуточную электрическую величину Y(ток или напряжение), функционально связанную с измеряемой величиной и непосредственно воздействующую на измерительный механизм. Измерительный механизм является электромеханическим преобразователем, осуществляющим преобразование электрической величины Yв наглядное аналоговое показание α. Отсчетное устройство состоит из указателя, жестко связанного с подвижной частью измерительного механизма, и неподвижной шкалы. Указатели бывают стрелочные (механические) и световые. Шкала – это совокупность отметок в виде штрихов, расположенных вдоль линии, по которым определяют числовое значение измеряемой величины. В общем случае на подвижную часть измерительного механизма при ее движении воздействуют моменты: вращающий Mвр, противодействующий Mпр и успокоения Mусп: где Вращающий момент возникает и однозначно определяется измеряемой величиной Х,но в общем случае может зависеть также от угла поворота подвижной части, т. е. Mвр = F(X,α).Вращающий моментдля измерительных механизмов, использующих силы электромагнитного поля, определяется из общего уравнения динамики системы: где Wэм – энергия электромагнитного поля, сосредоточенная в измерительном механизме. По способу создания вращающего момента, т. е. в зависимости от вида преобразования энергии электромагнитного поля в механическую энергию перемещения подвижной части, электромеханические измерительные механизмы делятся на магнитоэлектрические, электромагнитные, электростатические, электродинамические, ферродинамические и индукционные. Если бы движению подвижной части измерительного механизма ничего не противодействовало, то она при любом значении измеряемой величины (кроме нуля) доходила бы до упора, что делало бы измерение невозможным. Для того чтобы угол отклонения α однозначно зависел от измеряемой величины, в измерительном механизме создается противодействующий момент Mпр,направленный навстречу вращающему моменту и зависящий от угла поворота. Таким образом, при возникающем динамическом равновесии (Mвр + Mпр = 0) каждому определенному значению измеряемой величины будет соответствовать определенный угол поворота подвижной части. По способу создания противодействующего момента измерительные механизмы делятся на две группы: с механическим противодействующим моментом и с электрическим противодействующим моментом – логометры. В измерительных механизмах первой группы противодействующий момент создается с помощью упругого элемента (спиральной пружины, растяжек или подвеса), который при повороте подвижной части закручивается. В таких измерительных механизмах угол α определяется электрической величиной, создающей вращающий момент (ток, напряжение и др.). При этом значение Mпр определяется по формуле: где W – удельный противодействующий момент, зависящий от свойств упругого элемента. В логометрах противодействующий момент создается так же, как и вращающий, но один из моментов должен зависеть от угла поворота подвижной части. В этом случае угол поворота будет определяться отношением электрических величин, создающих вращающий и противодействующий моменты (например, отношением токов и т. д.). Момент успокоенияявляется моментом сил сопротивления движению, направлен всегда навстречу движению подвижной части и пропорционален угловой скорости отклонения: где P – коэффициент успокоения. Задачей Mусп является обеспечение плавного и апериодического движения подвижной части измерительного механизма. От него в значительной степени зависит важный эксплуатационный параметр прибора – время успокоения. Момент успокоения создается либо за счет применения специальных устройств, называемых демпферами, или успокоителями, либо без них. В зависимости от конструкции приборов в них применяются магнитоиндукционные, жидкостные или воздушные успокоители. 2.2. Общие узлы и детали Несмотря на то, что электромеханические измерительные приборы существенно различаются по своему устройству, имеется ряд узлов и деталей, общих для всех приборов данного типа. Такими деталями являются: корпус, шкала, указатель, устройства для установки и уравновешивания подвижной части измерительного механизма, устройства для создания противодействующего момента и момента успокоения, корректор, а в высокочувствительных приборах – арретир. Корпус прибора защищает измерительный механизм от внешних воздействий (механических повреждений, пыли, в отдельных случаях – от попадания воды, газов) и чаще всего выполняется из пластмассы. Для определения числового значения измеряемой величины приборы имеют отсчетное устройство, состоящее из шкалы и указателя. Шкала прибора обычно представляет собой пластину белого цвета, на которую нанесены отметки, соответствующие определенным значениям измеряемой величины, и условные обозначения. Номенклатура, изображение и место расположения условных обозначений устанавливаются нормативными документами. В соответствии с ними на шкалу наносят единицу измерения измеряемой величины, класс точности прибора, род тока, товарный знак предприятия-изготовителя, заводской номер, год изготовления или заменяющий его шифр, знак Государственного реестра, испытательное напряжение изоляции, используемое положение прибора (горизонтальное, вертикальное или под углом), символ, указывающий принцип действия прибора (табл. 1). Таблица 1 Информационные знаки на шкалах электромеханических измерительных приборов  Продолжение табл. 1  Указатели применяются стрелочные и световые. В первом случае стрелка, жестко соединенная с подвижной частью измерительного механизма, перемещается над шкалой прибора. При световом способе отсчета на оси подвижной части закрепляется зеркальце, освещаемое специальным осветителем. Отраженный от зеркальца световой луч попадает на шкалу и образует на ней световое пятно с темной нитью посередине. Применение светового указателя увеличивает чувствительность прибора, поскольку при этом масса и момент инерции подвижной части существенно уменьшаются, кроме того, меняя расстояние между шкалой и осью подвижной части, можно сделать длину луча довольно большой, что при одном и том же угловом перемещении увеличивает линейное перемещение. Крепление подвижной части измерительного механизма определяется элементом, создающим противодействующий момент, и выполняется с помощью опор (при использовании спиральных пружин), растяжек или подвеса. Опоры состоят из кернов и подпятников. Керны представляют собой отрезки стальной проволоки, заточенные с одной стороны в виде конуса. Подпятники имеют форму цилиндра с коническим углублением по оси. Чаще всего они изготавливаются из агата или корунда. Закрепленные на подвижной части по оси вращения керны входят в углубления подпятников, расположенных на неподвижной части. Основной недостаток данного способа крепления – трение при вращении, которое приводит к погрешности измерения. Этот недостаток в значительной степени устраняется при креплении подвижной части с использованием двух растяжек, представляющих собой упругие металлические ленты, прикрепляемые одним концом к подвижной части, а другим – к неподвижной. При создании натяжения ленты поддерживают подвижную часть, а при ее повороте закручиваются, создавая противодействующий момент. Растяжки изготавливаются из специальных сортов бронзы, а также из платиносеребряных и кобальтовых сплавов. При необходимости растяжки могут использоваться и для подвода тока к обмотке подвижной части. Крепление на подвесе применяется в приборах наибольшей чувствительности – гальванометрах. Подвес представляет собой тонкую упругую нить, на которой свободно подвешивается подвижная часть измерительного механизма. В таких приборах применяется световой отсчет, и они требуют установки по уровню, поскольку даже небольшое отклонение положения прибора от вертикального вызывает появление дополнительной погрешности измерения. Ток к подвижной части подводится посредством безмоментных токоподводов. Необходимая степень успокоения достигается с помощью специальных устройств, называемых демпферами, или успокоителями. Применяют магнито-индукционные, жидкостные и воздушные успокоители. Магнитоиндукционный момент успокоения создается в результате взаимодействия поля постоянного магнита и вихревых токов, наводимых либо в металлических (неферромагнитных) деталях подвижной части измерительного механизма, либо в закрепленной на подвижной части алюминиевой пластине, перемещающейся в рабочем зазоре постоянного магнита. Вместо пластины может использоваться короткозамкнутый виток. Магнитоиндукционный успокоитель отличается простотой конструкции и применяется в тех случаях, когда поле тормозного магнита не влияет на показания прибора. Жидкостное успокоение достигается тем, что подвижная часть измерительного механизма или ее фрагмент помещаются в вязкую жидкость. При движении подвижной части энергия расходуется на преодоление трения, возникающего между слоями жидкости благодаря наличию градиента скорости между ними, вследствие чего и создается необходимое успокоение. Основное достоинство жидкостного успокоения состоит в том, что оно оказывает тормозящее действие при движении подвижной части во всех направлениях, что используется для повышения вибростойкости приборов. Воздушный успокоитель состоит из камеры и находящейся внутри нее легкой пластины, жестко закрепленной на оси подвижной части. При вращении оси пластина перемещается внутри камеры, в результате чего по обе ее стороны создается разность давлений. Это препятствует свободному перемещению подвижной части и вызывает ее успокоение. Воздушные успокоители не содержат источников электромагнитных полей, что является их достоинством по сравнению с магнитоиндукционными. Для установки указателя на требуемую отметку шкалы (например, на ноль) в электромеханических приборах применяют устройство, называемое корректором. Основным элементом корректора является винт, расположенный на корпусе прибора. При его повороте происходит закручивание пружины, растяжек или подвеса, что перемещает подвижную часть и дает возможность установить указатель на нужную отметку шкалы. Некоторые приборы (как правило, гальванометры) снабжены арретиром – устройством для закрепления подвижной части измерительного механизма в неподвижном положении, что необходимо при переноске, транспортировке или хранении высокочувствительных приборов. Арретирование осуществляется механическим или электрическим путями. Во втором случае происходит замыкание накоротко обмотки подвижной части. 2.3. Магнитоэлектрические измерительные приборы Магнитоэлектрические измерительные приборы (МЭП) состоят из измерительной цепи, измерительного механизма и отсчетного устройства (рис. 2).  Рис. 2. Схема устройства магнитоэлектрического прибора: 1 – постоянный магнит; 2– полюсные наконечники; 3– неподвижный сердечник; 4– прямоугольная катушка; 5, 6 – полуоси; 7, 8 – спиральные пружины; 9 – стрелка; 10 – передвижные грузики Конструктивно измерительный механизм может быть выполнен либо с подвижным магнитом, либо с подвижной катушкой. На рис. 2 показана конструкция прибора с подвижной катушкой. Постоянный магнит 1,магнитопровод с полюсными наконечниками 2и неподвижный сердечник 3составляют магнитную систему механизма. В зазоре между полюсными наконечниками и сердечником создается сильное равномерное радиальное магнитное поле, в котором находится подвижная прямоугольная катушка 4,намотанная медным или алюминиевым проводом на алюминиевом каркасе. Катушка (рамка) 4может поворачиваться в зазоре на полуосях 5 и 6.Спиральные пружины 7 и 8 создают противодействующий момент и используются для подачи измеряемого тока от выходных зажимов прибора в рамку (механические и электрические соединения на рис. 2 не показаны). Рамка жестко соединена со стрелкой 9.Для балансировки подвижной части имеются передвижные грузики 10. Запас электромагнитной энергии в контуре с током I, находящемся в поле постоянного магнита, выражается формулой: где Ψ – полное потокосцепление данного контура с магнитным молем постоянного магнита. Тогда выражение (2) можно представить как Полное изменение потокосцепления с рамкой через конструктивные параметры рамки запишется следующим образом: где B–магнитная индукция в воздушном зазоре; S–площадь рамки; w – число витков рамки. Если предположить, что dα = 1 рад, то произведение BSw – величина постоянная для каждого данного прибора и равная изменению потокосцепления при повороте рамки на 1 рад. Обозначая его через Ψ0, запишем: Тогда Подставляя выражение (7) в формулу (6), получим выражение вращающего момента для магнитоэлектрического механизма в следующем виде: Установившееся положение подвижной части измерительного механизма наступает при равенстве вращающего и противодействующего моментов, т. е. с учетом формулы (3) запишем: Следовательно, уравнение преобразования для магнитоэлектрического измерительного механизма будет иметь вид: где SI– чувствительность измерительного механизма по току. Можно записать формулу (10) через конструктивные параметры измерительного механизма: Из формулы (10) следует, что угол отклонения подвижной части ИМ прямо пропорционален току в катушке, поэтому магнитоэлектрические приборы имеют равномерные шкалы. В магнитоэлектрических приборах успокоение подвижной части приборов магнитоиндукционное, т. е. создается взаимодействием магнитных полей от вихревых токов в каркасе катушки и поля постоянного магнита. Достоинства: высокий класс точности – 0,05 и ниже, равномерная шкала, высокая и стабильная чувствительность, малое собственное потребление мощности, большой диапазон измерений, на показания МЭП не влияют внешние магнитные и электрические поля. Недостатки: без преобразователей МЭП используются только в цепях постоянного тока, имеют малую нагрузочную способность, сложны и дороги, на их показания влияют колебания температуры. Применение: магнитоэлектрические измерительные механизмы используют в амперметрах, вольтметрах, омметрах и гальванометрах (обычных, баллистических и вибрационных). 2.4. Электромагнитные измерительные приборы В электромагнитных измерительных приборах (ЭМИП) для перемещения подвижной части используется энергия магнитного поля системы, состоящей из катушки с измеряемым током и одного или нескольких сердечников, выполненных из ферромагнитных материалов. Получили распространение три конструкции ЭМИП: с плоской катушкой; с круглой катушкой; с замкнутым магнитопроводом.  Рис. 3. Схема устройства электромагнитного прибора: 1 – ось; 2– спиральная пружина; 3– катушка; 4– стрелка; 5 – сердечник; 6 – успокоитель В ЭМИП с плоской катушкой (рис. 3) сердечник 5 из пермаллоя под действием сил поля втягивается в узкий воздушный зазор катушки 3 с обмоткой из медного провода. Ось 1 сердечника 5 со стрелкой 4, спиральной пружиной 2 и подвижной частью успокоителя 6 крепится на опорах или растяжках. Успокоители в ЭМИП могут быть воздушные, жидкостные или магнитоиндукционные. Энергия электромагнитного поля катушки с током I выражается формулой: Используя выражение (2), можно записать: Приравнивая вращающий и противодействующий моменты, получим: Из выражения (13) получаем уравнение преобразования для ЭМИП: Из выражения (14) видно, что шкала электромагнитно прибора квадратичная. Конструктивно добиваются равномерности шкалы, начиная с 1/5 части верхнего предела измерения. Достоинства: простота конструкции и высокая надежность, хорошая перегрузочная способность, возможность работы в цепях постоянного и переменного токов, классы точности 1,0; 1,5; 2,5; частотный диапазон 45 Гц... 10 кГц; диапазон измерения по току 0,005...300 А (при прямом включении) и до 20000 А с измерительным трансформатором тока (ИТТ); диапазон измерения по напряжению 1,5...60 В (при прямом включении) и до 6000 В с измерительным трансформатором напряжения (ИТН). Недостатки: большое собственное потребление энергии, невысокая чувствительность, неравномерная шкала, влияние внешних магнитных и температурных полей, частоты питающего напряжения на показания ЭМИП. Применение: электромагнитные приборы используют в качестве амперметров, вольтметров, фазометров, частотомеров, генриметров и фарадметров. Расширение пределов по току –секционирование и использование ИТТ, по напряжению – секционирование, применение добавочного резистора и ИТН. 2.5. Электродинамические измерительные приборы В электродинамических измерительных приборах (ЭДИП) для перемещения подвижной части используется энергия системы, состоящей из подвижной и неподвижной рамок с токами. Неподвижная часть может иметь одну, чаще две катушки, соединенные между собой параллельно или последовательно, намотанные медным проводом, внутри которых располагается подвижная катушка, обычно бескаркасная. Для ее включения в цепь измеряемого тока используются пружинки или растяжки. Успокоение подвижной части – воздушное или магнитоиндукционное (рис. 4).  Рис. 4. Схема устройства электродинамического прибора: 1 – неподвижная катушка; 2– подвижная катушка Внутри неподвижной катушки 1вращается укрепленная на оси подвижная катушка 2.Ток к ней подводится по спиральным токоподводящим пружинам, служащим одновременно для создания противодействующего момента. Электромагнитная энергия системы двух катушек с токами I1 и I 2 определяется по формуле: где L1и L2– индуктивности неподвижной и подвижной катушек; М – взаимная индуктивность. Индуктивности катушек L1и L2не зависят от положения в пространстве, поэтому первые два слагаемых равны нулю. Таким образом, получим следующее выражение для Mвр: Приравнивая вращающий и противодействующий моменты, получим: Отсюда получаем уравнение преобразования ЭДИП в виде: Учитывая, что взаимная индуктивность М катушек зависит от положения подвижной катушки относительно неподвижной, можно представить уравнение преобразования в общем виде: Уравнение (15) действительно для случая работы ЭДИП на постоянном токе. На переменном токе показания ЭДИП зависят от произведения действующих значений токов I1и I2 и от сдвига по фазе φ между этими токами: Достоинства: используются в цепях постоянного и переменного токов, классы точности 0,05; 0,1; 0,2. Диапазон измерений на постоянном токе 0,015... 10 А (прямое включение), на переменном токе 0,005... 200 А (прямое включение), до 600 А с ИТТ; измерения постоянного напряжения 1,5...600 В (прямое включение), 7,5...6000 В с Rдo6, переменного тока до 30 000 В с ИТН; частотный диапазон до 40 кГц. Недостатки: большое собственное потребление энергии шкала неравномерная, невысокая чувствительность, имеют малую перегрузочную способность, недопустимы тряски и вибрации, имеют сложную конструкцию и высокую стоимость, на показания этих приборов влияют внешние магнитные поля, температура и частота питающего напряжения. Применение: электродинамические приборы используют качестве амперметров, вольтметров, ваттметров (для расширен пределов измерения применяют секционирование катушек, Rдo6, ИТТ и ИТН), частотомеров, фазометров (на принципе логометров). 2.6. Ферродинамические измерительные приборы Ферродинамические приборы (ФДП) отличаются от ЭДИП тем, что неподвижная катушка расположена на сердечнике из ферромагнитного материала. Это приводит к значительному увеличению Mври уменьшению влияния внешних магнитных полей. Однако наличие магмитопровода снижает точность этих приборов за счет наличия потерь на гистерезис и вихревые токи. Достоинства: не боятся вибраций и тряски, внешние магнитные поля мало влияют на их показания, классы точности 0,2; 0,5; 1,0; 1,5; 2,5. Успокоение подвижной части – воздушное и магнитоиндукционное. Недостатки: на постоянном токе погрешность возрастает за счет потерь на гистерезис, сказывается влияние частоты питающего напряжения и температуры внешней среды; частотный диапазон 10 Гц...1,5 кГц, Применение: в основном используют в цепях переменного тока на промышленной частоте в качестве амперметров, вольтметров, ваттметров, большая величина Mврпозволяет использовать их в самописцах, расширение пределов измерения осуществляют так же, как у электродинамических приборов. 2.7. Электростатические измерительные приборы В электростатических измерительных приборах (ЭСИП) для перемещения подвижной части используется принцип взаимодействия двух или несколько электрически заряженных проводников, т. е. здесь в отличие от механизмов других систем перемещение подвижной части осуществляется за счет непосредственно приложенного напряжения. Таким образом, эти приборы по своему принципу действия являются приборами, измеряющими только напряжение. Конструктивно электростатические измерительные приборы можно представить в виде плоского конденсатора с подвижными и неподвижными электродами. Перемещение подвижной части связано с изменением емкости системы, которая может быть осуществлена либо изменением площади электродов, либо изменением расстояния между ними.  Рис. 5. Схема устройства электростатического прибора: 1 – подвижная пластина; 2– неподвижные пластины; 3 –ось На рис. 5 приведена схема устройства электростатического прибора. Подвижная алюминиевая пластина 1, закрепленная вместе со стрелкой на оси 3,может перемещаться, взаимодействуя с двумя электрически соединенными неподвижными пластинами 2. Входное напряжение подается на подвижную и неподвижную пластины. Под действием электростатических сил подвижная пластина втягивается между неподвижными пластинами. Обобщенное выражение Mврдля электростатического прибора, определяемое по формуле (2), имеет вид: Энергия поля заряженного конденсатора определяется уравнением: Поэтому где C – емкость, образуемая между электродами электростатического прибора. Приравнивая вращающий и противодействующий моменты, получим: Из выражения (17) видно, что шкала прибора квадратичная. Конструктивно добиваются частичной линеаризации шкалы так, что рабочая часть начинается примерно с 1/5 части общей длины шкалы. Успокоение подвижной части – магнитоиндукционное или воздушное. Достоинства: не потребляют энергии в цепях постоянно го тока и очень незначительное потребление в цепях переменного тока, классы точности: 0,05; 0,1; 1,0; 1,5; 2,5; частотный диапазон 20 Гц... 10 МГц; диапазон измерений постоянного напряжения от 10 В до 7500 кВ, переменного напряжения от 30 В до 7500 кВ, независимость показаний от изменения температуры, частоты и формы кривой измеряемого напряжения, а также внешних магнитных полей. Недостатки: низкая чувствительность, неравномерная шкала, сказывается влияние внешних электрических и электростатических полей. Применение: электростатические измерительные приборы используют в цепях постоянного и переменного токов в качестве вольтметров. Для расширения пределов измерения по напряжению используются резисторные и емкостные делители напряжения. 2.8. Индукционные измерительные приборы В индукционных измерительных приборах (ИИП) особым положением катушек получают вращающееся электромагнитное поле, которое, пронизывая алюминиевый цилиндр, индуцирует в нем вихревые токи, что вызывает возникновение вращающего момента. С помощью спиральных бестоковых пружин создается противодействующий момент и обеспечивается пропорциональность измеряемой величины отклонению подвижной системы. Зависимость показаний ИИП от колебаний частоты тока возбуждения и температуры окружающей среды ограничивает применение этих приборов. Индукционный измерительный механизм используется в самопишущих приборах, для построения указателя вращающегося поля, синхроскопа, частотомера и в счетчиках электрической энергии. Упрощенная схема однофазного индукционного счетчика электрической энергии показана на рис. 6. 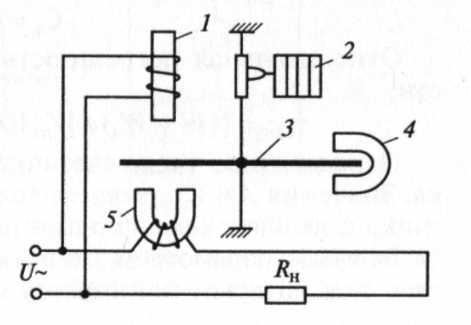 Рис. 6. Схема однофазного индукционного счетчика: 1 – катушка напряжения; 2– счетный механизм; 3– алюминиевый диск; 4 – постоянный магнит; 5 – П-образный сердечник Механизм прибора состоит из двух неподвижных магнитопроводов: трехстержневого сердечника с катушкой напряжения 1и П-образного сердечника 5 с двумя последовательно соединенными токовыми катушками, счетного механизма 2, алюминиевого диска 3,жестко укрепленного на оси, и постоянного магнита 4,служащего для создания тормозного момента. Анализ работы индукционного счетчика показывает, что его вращающий момент пропорционален активной мощности переменного тока, т. е. где К1 – коэффициент пропорциональности; φ – угол сдвига фаз между напряжением Uи током I; Р – активная мощность. Под влиянием Mврдиск счетчика начинает вращаться. На диск счетчика действует тормозной момент Мт,создаваемый постоянным магнитом, который упрощенно можно считать пропорциональным скорости вращения диска: где К2 – коэффициент пропорциональности. При неизменной активной мощности в цепи Mвр= Мт. Тогда Выражение (18) можно представить в виде: Проинтегрировав выражение (19) по времени от t1 до t2, получим:  . .Тогда К1W = K22πN,где W – активная энергия, учтенная счетчиком за время от t1 до t2; N – число оборотов диска за время от t1 до t2. Следовательно, где Сном – номинальная постоянная счетчика (количество энергии, учитываемой счетчиком за один оборот диска). Сном определяется по формуле: где A– передаточное число счетного механизма в виде числа оборотов, соответствующих единице энергии. Количество электричества, реально прошедшее за один оборот диска, зависит от тока и характера нагрузки, внешних условий (например, от температуры и частоты), характеризуется действительной постоянной счетчика Cд, которая, как правило, не равна номинальной. Она определяется путем измерения действительно израсходованной энергии Wдза некоторое число оборотов диска N при помощи ваттметра и секундомера. В этом случае: где P – мощность, измеренная ваттметром; t – время. Тогда Относительная погрешность счетчика, т. е. его класс точности, определяется по формуле: Передаточное число счетчика Aуказывается на щитке счетчика. Значения Aи Сном зависят только от конструкции данного счетчика и являются величинами постоянными. Важным параметром счетчика является порог чувствительности,под которым понимается минимальная нагрузка, выражаемая обычно в процентах от номинальной, при которой подвижная часть начинает безостановочно вращаться. Наряду с этим счетчик не должен иметь самоход при разомкнутой токовой цепи и изменении напряжения в пределах 220 В ± 10 %. Счетчики активной энергии выпускаются классов точности 0,5; 1,0; 2,0; 2,5. Порог чувствительности счетчика не должен превышать 0,4 % для счетчиков класса точности 0,5 и 0,5 % для счетчиков класса точности 1,0; 2,0; 2,5. Применение: индукционные счетчики используют для измерения электрической энергии в однофазных и трехфазных цепях. |