Практическая работа 27. Анализ неисправностей рулевого управления
 Скачать 1.01 Mb. Скачать 1.01 Mb.
|

|
Практическая работа №27 Тема: Анализ неисправностей рулевого управления. Рулевое управление Назначение. Рулевое управление предназначено для изменения направления движения автомобиля посредством поворота передних управляемых колес. Общее устройство. Основными элементами рулевого управления современного автомобиля являются рулевое колесо с рулевой колонкой, рулевой механизм и рулевой привод (рис. 1). В конструкции рулевого управления многих автомобилей применяют усилители рулевого управления (гидравлические, электрические).  Рулевое колесо воспринимает от водителя усилия, необходимые для изменения направления движения, и передает их через рулевую колонку рулевому механизму. Диаметр рулевого колеса легковых автомобилей находится в диапазоне 380…425 мм, грузовых автомобилей – 440…550 мм. Рулевое колесо спортивных автомобилей имеет меньший диаметр. Рулевая колонка обеспечивает соединение рулевого колеса с рулевым механизмом. Рулевая колонка представлена рулевым валом, имеющим несколько шарнирных соединений. На современных автомобилях предусмотрено механическое или электрическое регулирование положения рулевой колонки. Регулировка может производиться по вертикали, по длине или в обоих направлениях. В целях защиты от угона осуществляется механическая или электрическая блокировка рулевой колонки. Рулевой механизм предназначен для увеличения усилия, приложенного к рулевому колесу, и передачи его рулевому приводу. В качестве рулевого механизма используются различные типы редукторов. Наибольшее распространение на легковых автомобилях получили реечные рулевые механизмы. Рулевой привод предназначен для передачи усилия от рулевого механизма на управляемые колеса. Он обеспечивает оптимальное соотношение углов поворота управляемых колес, а также препятствует их повороту при работе подвески. Усилитель рулевого управления предназначен для уменьшения необходимого усилия на рулевом колесе при повороте автомобиля. На рис. 2 представлено устройство рулевого управления без усилителя (на примере автомобиля ВАЗ 2107). 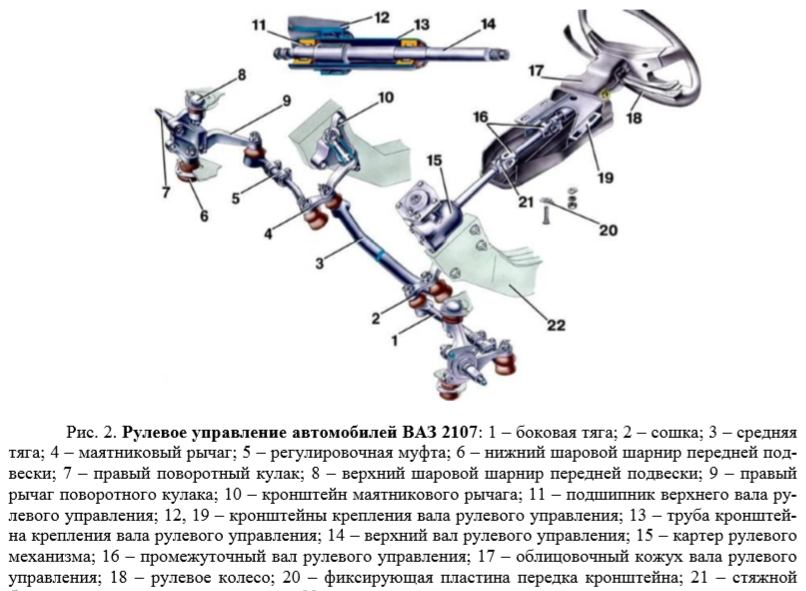 Принцип действия. При вращении рулевого колеса воздействие через рулевой вал передается на рулевой механизм. Рулевой механизм за счет своего передаточного отношения усиливает это воздействие и через рулевую сошку смещает тяги рулевого привода, которые посредством поворотных рычагов поворачивают управляемые колеса. Рулевой механизм Рулевой механизм преобразовывает вращение рулевого колеса в поступательное перемещение тяг рулевого привода, вызывающее поворот управляемых колес. При этом усилие, передаваемое водителем от рулевого колеса к поворачиваемым колесам, возрастает во много раз. На современных автомобилях применяются следующие разновидности рулевых механизмов: червячные; реечные; винтовые. Червячный рулевой механизм. Рулевой механизм типа «червяк – ролик» состоит из картера рулевой передачи, червяка, установленного в картере на двух конических подшипниках, ролика (двух- или трехгребневого), вращающегося на оси кривошипа, вала и сошки (рис. 3). В картере рулевого механизма в постоянном зацеплении находится пара «червяк – 128 ролик». Червяк связан с нижним концом рулевого вала, а ролик, в свою очередь, находится на валу рулевой сошки. При вращении рулевого колеса ролик начинает обкатываться по профилю червяка, что приводит к повороту вала рулевой сошки. 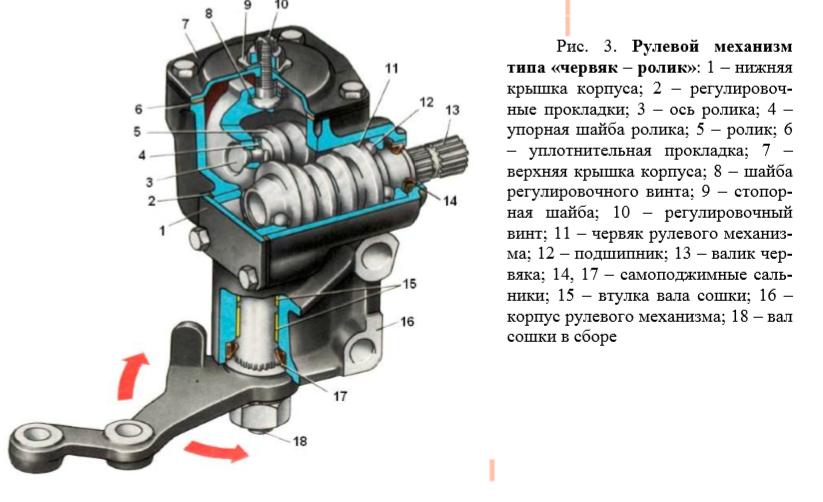 Вращение рулевого колеса через рулевой вал передается на глобоидный червяк, который находится в зацеплении с роликом. При вращении червяка ролик перемещается вдоль нарезки червяка. Перемещение ролика вызывает поворот вильчатого кривошипа, который поворачивает вал сошки. От сошки перемещение передается на рулевой привод, который обеспечивает поворот управляемых колес на заданный угол. Результатом взаимодействия пары «червяк – ролик» является преобразование вращения рулевого колеса в поворот рулевой сошки в ту или другую сторону. Реечный рулевой механизм. Рулевые механизмы реечного типа применяют в основном в конструкции легковых автомобилей (рис. 4). Рулевой механизм реечного типа отличается от червячного тем, что вместо пары «червяк – ролик» применяется пара «шестерня – рейка». Схема работы ГУР. Работа гидроусилителя с осевым распределителем (без электронного блока) схематично представлена на рис. 12. При неподвижном рулевом колесе золотник удерживается в среднем (нейтральном) положении центрирующими пружинами (рис. 12а). Полости распределителя соединены между собой так, что жидкость свободно перетекает из нагнетательной магистрали в сливную. Насос усилителя работает только на прокачку жидкости по системе, а не на поворот колес. При повороте руля золотник перемещается и перекрывает сливную магистраль (рис. 12б). Масло под давлением поступает в одну из рабочих полостей цилиндра. Под действием жидкости поршень со штоком поворачивает колеса. В свою очередь они перемещают корпус распределителя в сторону движения золотника. Как только рулевое колесо перестает вращаться, золотник останавливается и корпус его «догоняет». Восстанавливается нейтральное положение распределителя, при котором опять открывается сливная магистраль и прекращается поворот колес. Так реализуется кинематическое следящее действие усилителя – обеспечение поворота колес на угол, задаваемый водителем при вращении руля. «Чувство дороги» – это обратная связь от управляемых колес через усилитель к рулю. Дает информацию об условиях, в которых происходит поворот колес. Для этого, как и на автомобиле без усилителя, на скользкой дороге руль должен поворачиваться легче, чем на сухом асфальте. «Чувство дороги» (силовое следящее действие) помогает водителю правильно работать рулем в любых условиях. Для его осуществления в различных конструкциях распределителей предусмотрены плунжеры, камеры или реактивные шайбы. Чем больше сопротивление повороту колес, тем выше давление в цилиндре и распределителе. При этом одна из реактивных шайб с большим усилием стремится вернуть золотник обратно в нейтральное положение. В результате руль становится «тяжелее». При наезде на препятствие (например, камень) оно воздействует на управляемые колеса, стремясь их повернуть, что особенно опасно на высоких скоростях. Колеса, начав вынужденный поворот, перемещают корпус распределителя относительно золотника, перекрывая сливную магистраль. Масло под давлением поступает в полость цилиндра. Поршень пе 135 редает усилие на колеса в обратном направлении, не позволяя им поворачиваться дальше. Так как ход золотника небольшой (около 1 мм), автомобиль практически не изменит направление движения. Гидроусилитель не только облегчает водителю поворот колес, но и оберегает пальцы его рук от ударов спицами руля при наездах на препятствия. Небольшой толчок на руле все же будет ощущаться из-за реактивных шайб, давление над которыми возрастет. 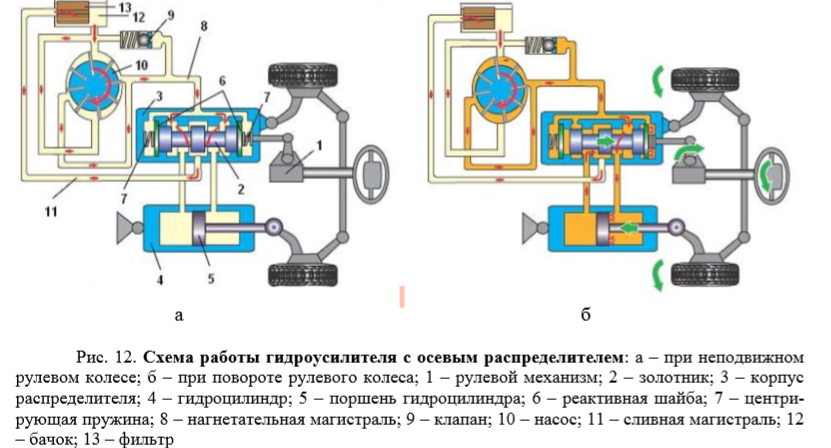 В случае прекращения работы насоса (например, при обрыве ремня привода) возможность управления автомобилем сохраняется. Усилие от рулевого механизма в этом случае будет передаваться самим золотником на корпус распределителя и далее на колеса. Жидкость, перетекая через перепускной клапан (на схеме не показан) из одной полости гидроцилиндра в другую, практически не будет препятствовать повороту колес. Но так как гидроусилитель не работает, руль становится «тяжелее». Принцип работы гидроусилителя с вращающимся (роторным) золотником аналогичен описанному. 1.3.2 Электроусилители рулевого управления Электроусилителем рулевого управления называется конструктивный элемент рулевого управления автомобиля, в котором дополнительное усилие при повороте рулевого колеса создается с помощью электрического привода. В конструкции современного автомобиля все чаще вместо гидроусилителя применяют электроусилитель рулевого управления. Основными преимуществами электроусилителя руля в сравнении с гидроусилителем рулевого управления являются: удобство регулирования характеристик рулевого управления и независимость работы усилителя от оборотов двигателя автомобиля; высокая информативность рулевого управления; высокая надежность в связи с отсутствием гидравлической системы; топливная экономичность, обусловленная экономным расходованием энергии (во первых, электроусилитель потребляет энергию только при вращении рулевого колеса в отличие от гидроусилителя, в котором рабочая жидкость всегда гоняется по трубам, на что тратится дополнительная энергия, во-вторых, коэффициент полезного действия электродвигателя намного выше кпд гидронасоса). 136 Кроме того, электроусилитель (например, ZF Servolectric) в зависимости от полной массы и компоновки автомобиля может встраиваться в различные звенья рулевого управления: для автомобилей малого класса – в рулевую колонку, среднего класса – в рулевой механизм, в автомобилях большого класса и микроавтобусах – интегрируется с рулевой рейкой Наиболее совершенным с точки зрения конструкции является электромеханический усилитель рулевого управления. Известными конструкциями такого усилителя являются электромеханический усилитель руля с двумя шестернями и электромеханический усилитель руля с параллельным приводом. Основными элементами электромеханического усилителя рулевого управления являются электродвигатель усилителя, механическая передача и система управления. Электроусилитель руля обычно расположен в одном блоке с рулевым механизмом. На рис. 14 представлена схема устройства электромеханического усилителя руля c двумя шестернями, а на рис. 15 – схема электромеханического усилителя руля c параллельным приводом. 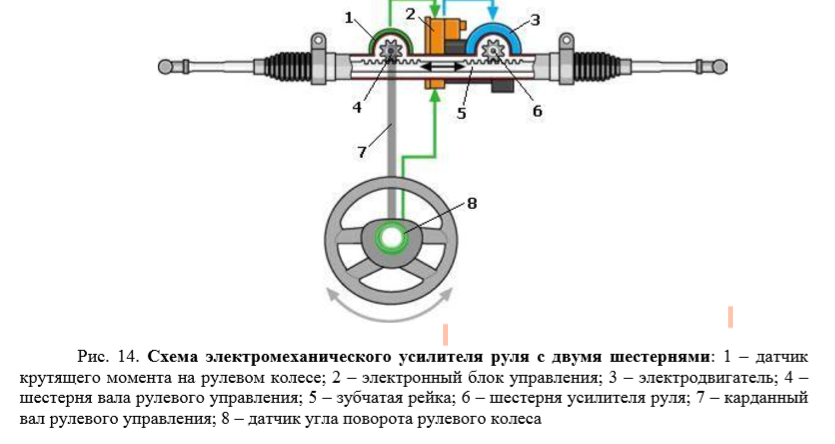 Принцип действия электроусилителя рулевого управления. Электроусилитель руля обеспечивает работу рулевого управления автомобиля в следующих режимах: поворот автомобиля; поворот автомобиля на малой скорости; поворот автомобиля на большой скорости; активный возврат колес в среднее положение; поддержание среднего положения колес. Поворот автомобиля осуществляется поворотом рулевого колеса. Крутящий момент от рулевого колеса передается через торсион на рулевой механизм. Закрутка торсиона измеряется датчиком крутящего момента, угол поворота рулевого колеса – датчиком угла поворота рулевого колеса. Информация от этих датчиков, а также о скорости автомобиля, частоте вращения коленчатого вала двигателя передается в электронный блок управления. Блок управления рассчитывает необходимую величину крутящего момента электродвигателя усилителя и путем изменения величины силы тока обеспечивает ее на электродвигателе. Крутя щий момент от электродвигателя передается на рейку рулевого механизма и далее через рулевые тяги на ведущие колеса. Таким образом, поворот колес автомобиля осуществляется за счет объединения усилий, передаваемых от рулевого колеса и электродвигателя усилителя. Поворот автомобиля на небольшой скорости обычно производится при парковке. Он характеризуется большими углами поворота рулевого колеса. Электронная система управления обеспечивает в данном случае максимальный крутящий момент электродвигателя (так называемый «легкий руль»). При повороте на высокой скорости, наоборот – электронная система управления обеспечивает наименьший крутящий момент (так называемый «тяжелый руль»). Система управления может увеличивать реактивное усилие, возникающее при повороте колес. Происходит активный возврат колес в среднее положение. При эксплуатации автомобиля нередко возникает потребность в поддержании среднего положения колес (движение при боковом ветре, разном давлении в шинах). В этом случае система управления обеспечивает коррекцию среднего положения управляемых колес. 1.3.3 Электрогидравлический усилитель рулевого управления Наиболее совершенным с точки зрения потребительских свойств и конструкции является электрогидравлический усилитель руля (рис 16). Преимуществами электрогидравлического усилителя являются компактность, возможность функционирования на неработающем двигателе, экономичность за счет включения в нужный момент. В конструкции данного гидроусилителя предусмотрена возможность электронного регулирования коэффициента усиления. Поэтому наряду с комфортностью управления усилитель может обеспечить легкость маневрирования на малых скоростях, что недоступно обычному гидроусилителю. Основными элементами электрогидравлического усилителя рулевого управления являются насосный агрегат, гидравлический узел управления и система управления. Насосный агрегат представляет собой объединенный блок, включающий гидравлический насос, электродвигатель насоса и бачок для рабочей жидкости. На насосный агрегат устанавливается электронный блок управления. Гидравлический насос может быть лопастного или шестеренного типа. Наиболее простым и надежным является шестеренный насос. Гидравлический узел управления является исполнительным механизмом усилителя руля. Он включает в себя торсион с поворотным золотником и распределительной гильзой и силовой цилиндр с поршнем. Гидравлический узел управления объединен с рулевым механизмом. Шток поршня силового цилиндра является продолжением рейки рулевого механизма. Система управления обеспечивает работу гидроусилителя. На современных автомобилях используется электронная система управления, которая обеспечивает регулирование коэффициента усиления в зависимости от скорости поворота рулевого колеса и скорости движения автомобиля. Усилитель с такими характеристиками называется адаптивным усилителем рулевого управления. На автомобилях концерна Volkswagen и BMW электронная система управления гидравлическим усилителем руля имеет торговое название Servotronic. Основными элементами системы Servotronic являются входные датчики, электронный блок управления и исполнительное устройство. Входными датчиками системы являются датчик усилителя руля (датчик угла поворота рулевого колеса – на автомобилях, оборудованных ESP), датчик спидометра. Помимо датчиков, система использует информацию о частоте вращения коленчатого вала двигателя, поступающую от системы управления двигателем. |