Реферат ЛОГВИНОВ В.В.. Автоматизация и моделирование технических средств, элементов и методов судовождения
 Скачать 6.23 Mb. Скачать 6.23 Mb.
|

1 2
Оглавление Предисловие………………………………………………………………………3 Введение…………………………………………………………………………..4 1. Элементы судовых навигационных автоматизированных комплексов………………………………………………………………………..7 1.0 Понятие о судовом навигационном комплексе…………………………….7 1.1 Навигационные измерительные устройства………………………………..8 1.2 средства обработки навигационной информации………………………….9 1.3 Математическое обеспечение навигационных автоматизированных комплексов……………………………………………………………………….10 1.4 Средства отображения навигационной информации……………………..10 2. Автоматизация судов….………………………………...................................12 3. Автоматизированная судовая навигационная подсистема…………………203.1 Назначение и решаемые задачи…………………………………………….203.2 Принцип автоматического счисления пути судна………………………...213.3 Характеристики современных АСНП……………………………………...22Заключение……………………………………………………………………….25 Библиографический список……………………………………………………..27 Предисловие С развитием научно-технического прогресса выполнение операций судовождения автоматизируются, а навигационный комплекс пополняется средствами автоматизации. Целью исследования становится определение степени автоматизации навигационных приборов на современных судах, базисные особенности НУИАК и определение дальнейшего развития автоматизированных систем на судах. Задача-исследовать системы управления мостиковыми комплексами; степень автоматизации судового оборудования; перспективы развития Искусственного интеллекта. Исследовано развитие современных приборов навигации, математическое обоснование принципов работы навигационных приборов, вектор направленности конфигурирования управляющих мостиковых систем судна в будущем. Введение Навигационным комплексом принято называть судовые технические средства, с помощью которых решаются задачи судовождения. Существенное значение для анализа структуры навигационного комплекса и выполняемых им функций имеет рассмотрение решаемой с помощью комплекса задачи проводки судна из порта отхода в порт назначения. Эта задача может быть разделена на следующие основные задачи: - выбор маршрута перехода; - подбор карт и пособий на переход, приведение их на современный уровень, а также накопления другой информации, необходимой для безопасного выполнения перехода; - оперативная коррекция выбранного пути и скорости движения в процессе перехода на основе оценки состояния окружающей среды как в непосредственной близости от судна, так и на всем пути следования к порту назначения; - обеспечения точности плавания по намеченному маршруту. С развитием научно-технического прогресса выполнение операций судовождения автоматизируются, и навигационный комплекс пополняется средствами автоматизации. Когда уровень автоматизации в комплексе становится заметным, его начинают называть автоматизированным. В настоящее время технической основой автоматизации операций судовождения стали электронные вычислительные машины (ЭВМ), а также микропроцессоры и микроЭВМ. Они берут на себя функции, связанные с обработкой и хранением информации, прогнозированием развития ситуаций, управление движением и т. д. Включая выбор мер, повышающих эффективность решения задач. Наиболее развитой к настоящему времени является автоматизация операций задачи, реализации стратегии плавания, включая прокладку движения встречных судов. Создаваемые навигационные автоматизированные комплексы (НАК) отличаются друг от друга по уровню и содержанию автоматизации, принципу построения и другим признакам. По уровню автоматизации различают комплексы с низким, средним и высоким уровнем автоматизации. В зависимости от принципа построения выделяют децентрализованные разобщенные комплексы, централизованные комплексы и комплексы с иерархической децентрализацией (модульные комплексы). Первые комплексы включают в себя ряд разобщенных устройств для автоматического выполнения простейших операций, например для стабилизации курса, для счисления пути и т. д. Учет взаимосвязей решаемых задач при таком принципе автоматизации полностью ложиться на судоводителя. В централизованных НАК решение круга возложенных на них задач производится одной ЭВМ. Такое построение НАК было характерным для начала этапа комплексной автоматизации, когда ЭВМ были сравнительно дорогостоящими и круг решаемых с помощью средств автоматизации задач не слишком велик. В частности, отечественный НАК "Бриз" является централизованным. Достоинством централизованной структуры комплексов стала возможность учета информационной взаимосвязи решаемых при судовождении задач. Опыт эксплуатации централизованных НАК выявил ряд их недостатков. При высоком уровне автоматизации операций судовождения чрезвычайно возрастает сложность математического обеспечения ЭВМ, резко повышаются требования к ее производительности, надежности взаимодействию с внешней средой, режимам обработки информации. Кроме того, централизованные системы имеют пониженную живучесть, т. к. выход из строя ЭВМ приводит к прекращению функционирования всей системы. При модульном построении комплекс подразделяется на ряд в определенной степени самостоятельных подсистем, решающих определенные задачи из входящих в главную задачу системы. Таким образом, модульные НАК состоят из отдельных подсистем (модулей) различных уровней, каждая из которых может функционировать как самостоятельно, так и в рамах всей системы, подчиняясь командам подсистем высшего уровня. Модульные комплексы более гибки, чем централизованные. В настоящее время модульное построение НАК является преобладающим. НАК включает в себя следующую аппаратуру: навигационные измерительные устройства (гирокомпас, лаг, эхолот, приемники различных систем определения места), одну или несколько ЭВМ, устройства преобразования информации для ЭВМ, средства отображения информации, аналоговые управляющие устройства. В силу специфики эксплуатации, к аппаратуре комплекса предъявляются следующие требования: - наличие минимальных размеров, массы и потребляемой мощности; - высокая надежность работы; - возможность работы в условиях качки, вибрации, ударов, в широком диапазоне при изменениях температуры и повышенной влажности; - простота эксплуатации и решения предусмотренного круга задач; - наличие системы контроля за состоянием аппаратуры и правильностью решения задач; - умеренная стоимость. 1. Элементы судовых навигационных автоматизированных комплексов. 1.0 Понятие о судовом навигационном комплексе. Навигационным комплексом принято называть судовых технических средств, с помощью которых решаются задачи судовождения. Существенное значение для анализа структуры навигационного комплекса и выполняемых им функций имеет рассмотрение решаемой с помощью комплекса задачи проводки судна из порта отхода в порт назначения. Эта задача может быть разделена на следующие основные задачи: выбор маршрута перехода; подбор карт и пособий на переход, приведение их на современный уровень, а также накопления другой информации, необходимой для безопасного выполнения перехода; оперативная коррекция выбранного пути и скорости движения в процессе перехода на основе оценки состояния окружающей среды как в непосредственной близости от судна, так и на всем пути следования к порту назначения; обеспечения точности плавания по намеченному маршруту. С развитием научно-технического прогресса выполнение операций судовождения автоматизируются, и навигационный комплекс пополняется средствами автоматизации. Когда уровень автоматизации в комплексе становится заметным, его начинают называть автоматизированным. В настоящее время технической основой автоматизации операций судовождения стали электронные вычислительные машины (ЭВМ), а также микропроцессоры и микроЭВМ. Они берут на себя функции, связанные с обработкой и хранением информации, прогнозированием развития ситуаций, управление движением и т. Д. Включая выбор мер, повышающих эффективность решения задач. Наиболее развитой к настоящему времени является автоматизация операций задачи, реализации стратегии плавания, включая прокладку движения встречных судов. Создаваемые навигационные автоматизированные комплексы (НАК) отличаются друг от друга по уровню и содержанию автоматизации, принципу построения и другим признакам. По уровню автоматизации различают комплексы с низким, средним и высоким уровнем автоматизации. В зависимости от принципа построения выделяют децентрализованные разобщенные комплексы, централизованные комплексы и комплексы с иерархической децентрализацией (модульные комплексы). Первые комплексы включают в себя ряд разобщенных устройств для автоматического выполнения простейших операций, например для стабилизации курса, для счисления пути и т. Д. Учет взаимосвязей решаемых задач при таком принципе автоматизации полностью ложиться на судоводителя. В централизованных НАК решение круга возложенных на них задач производится одной ЭВМ. Такое построение НАК было характерным для начала этапа комплексной автоматизации, когда ЭВМ были сравнительно дорогостоящими и круг решаемых с помощью средств автоматизации задач не слишком велик. В частности, отечественный НАК "Бриз" является централизованным. Достоинством централизованной структуры комплексов стала возможность учета информационной взаимосвязи решаемых при судовождении задач. Опыт эксплуатации централизованных НАК выявил ряд их недостатков. При высоком уровне автоматизации операций судовождения чрезвычайно возрастает сложность математического обеспечения ЭВМ, резко повышаются требования к ее производительности, надежности взаимодействию с внешней средой, режимам обработки информации. Кроме того, централизованные системы имеют пониженную живучесть, т. к. Выход из строя ЭВМ приводит к прекращению функционирования всей системы. При модульном построении комплекс подразделяется на ряд в определенной степени самостоятельных подсистем, решающих определенные задачи из входящих в главную задачу системы. Таким образом, модульные НАК состоят из отдельных подсистем (модулей) различных уровней, каждая из которых может функционировать как самостоятельно, так и в рамах всей системы, подчиняясь командам подсистем высшего уровня. Модульные комплексы более гибки, чем централизованные. В настоящее время модульное построение НАК является преобладающим. НАК включает в себя следующую аппаратуру: навигационные измерительные устройства (гирокомпас, лаг, эхолот, Приемники различных систем определения места), одну или несколько ЭВМ, устройства преобразования информации для ЭВМ, средства отображения информации, аналоговые управляющие устройства. В силу специфики эксплуатации к аппаратуре комплекса предъявляются следующие требования: наличие минимальных размеров, массы и потребляемой мощности; высокая надежность работы; возможность работы в условиях качки, вибрации, ударов, в широком диапазоне при изменениях температуры и повышенной влажности; простота эксплуатации и решения предусмотренного круга задач; наличия системы контроля за состоянием аппаратуры и правильностью решения задач; умеренная стоимость. 1.1 Навигационные измерительные устройства. Навигационные измерительные устройства, входящие в НАК, служат для измерения величин, характеризующих процесс судовождения. Эти величины обычно называются навигационными параметрами. Они могут быть разделены на две группы: параметры, характеризующие движение судна, и навигационные параметры ориентиров. В зависимости от того, к какой группе относится измеряемый параметр, навигационные измерительные устройства подразделяются на измерители собственного движения и позиционные измерители. Измерители собственного движения обычно делятся в зависимости от вида измеряемого параметра на устройства для измерения направления, скорости и пройденного расстояния, угловой скорости поворота. К первым относятся гироскопические и магнитные компасы, гироазимуты; ко вторым - различные типы лагов: гидравлические, индукционные, гидроакустические. Угловая скорость при поворотах измеряется гиротахометрами. К точности показаний измерительных устройств, предъявляются определенные требования, иногда установленные в международном масштабе. Позиционные измерительные устройства в зависимости от измеряемого параметра ориентиров подразделяются на угломерные, дальномерные, разностно-дальномерные и комбинированные. Большую группу этих устройств в настоящее время составляют радиотехнические измерительные устройства, которые находят широкое применение в НАК. Эти измерительные устройства являются частью РНС определения места, включающих наземные станции или космические объекты и бортовую аппаратуру. Особую группу радиотехнических измерительных устройств составляют РЛС. Они служат датчиками информации об окружающей судно обстановке и используются для измерения пеленгов и расстояний объектов. РЛС применяются как при определении положения своего судна, так и для нахождения элементов движения других судов. Важную роль играют они при обеспечении безопасности плавания в условиях плохой видимости. Совокупность навигационных измерительных устройств на судне должна создавать объективную возможность решения задач судовождения с требуемой точностью и надежностью. Поэтому повышение точности и надежности судовождения в первую очередь связывается с совершенствованием навигационных измерительных устройств. 1.2 средства обработки навигационной информации. Навигационные ЭВМ. Техническую основу автоматизации судовождения составляют ЭВМ. ЭВМ по своей природе универсальны, так как их главной особенностью является принцип программного управления, согласно которому вычисления производятся в соответствии с программами, помещенными в память машины. Это делает ЭВМ при разработке соответствующих программ пригодными к решению разнородных задач, встречаемых в навигации. ЭВМ обладают высоким быстродействием и дают возможность обрабатывать информацию синхронно с ходом процесса в реальном масштабе времени, как требуется при управлении движущимися объектами. ЭВМ обеспечивает любую требуемую точность вычислений, что имеет большое значение при решении навигационных задач. ЭВМ имеют запоминающие устройства большой емкости, позволяющие запомнить необходимые при управлении судном многочисленные сведения об ориентирах, навигационных опасностях, элементах движения встречных судов и т. д. 1.3 Математическое обеспечение навигационных автоматизированных комплексов. Под математическим (программным) обеспечением системы понимается совокупность программ, которые хранятся в памяти ЭВМ, входящих в автоматизированную систему. Математическое обеспечение специализированных ЭВМ обычно делят на две части: общую и специальную. Первая служит для обеспечения вычислительного процесса, обеспечения удобства работы с машиной, контроля за ее работой, обеспечением отладки программы и т. д. Эта часть программного обеспечения тесно связана с характеристиками ЭВМ, а ее разработчиками обычно являются производители ЭВМ. Специальная часть математического обеспечения ЭВМ включает программы прикладных задач. Для электронных вычислительных машин, входящих в состав НАК, это программы счисления пути судна, нахождения обсервованного места, управления движением судна, обработки радиолокационной информации и т. д. Касаясь автоматизации судовождения, необходимо отметить, что ЭВМ не только позволяют освободить от трудоемких вычислений, но и предоставляют определенные возможности для повышения точности и надежности решения задач по сравнению с существовавшими средствами обработки информации. Анализируя основные отличия от традиционной, машинной, обработки данных в современных НАК, можно заметить, что они состоят как в более эффективном использовании статистической и структурной избыточности информации, так и в более полном учете динамики протекающих в системе процессов. 1.4 Средства отображения навигационной информации. Отображения навигационной информации заключается в демонстрации перед судоводителем данных, характеризующих процесс судовождения. Эти данные требуется отображать в различной форме: буквенно-цифровой, графической, картинной. Оперативность, наглядность и полнота отображения навигационной информации имеют большое значение в повышении эффективности управления судами и обеспечении безопасности плавания. Поэтому средства отображения информации играют в автоматизированных комплексах первостепенную роль. В настоящее время в автоматизированных системах с ЭВМ используются три способа отображения информации: световая сигнализация, регистрация и индикация. Под сигнализацией понимается сообщение оператору о факте перехода интересующей его величины из одного состояния, в отличное от него по определенному признаку, другое состояние. Например, сообщение судоводителю о возникновении нежелательного отклонения от курса, либо о появлении встречного судна, либо о возникновении опасности столкновения с другим судном. Регистрация информации предназначается для записи в некоторой символической форме отдельных фактов и величин с целью их документирования. В системах с ЭВМ для документирования информации в буквенно-цифровой форме применяются телетайпы и малогабаритные печатающие аппараты. Для документирования графической информации применяются графопостроители. В навигационных системах с помощью специальных построителей вычерчивается путь судна в меркаторской проекции. Масштаб карты для ведения прокладки, интервал нанесения точек пути судна, интервал картографической сетки и ряд других параметров заносятся в память прокладчика. Особое значение в НАК имеют устройства индикации, которые служат для отображения оперативной информации о процессе судовождения. Наиболее распространенными из них являются дисплеи. Широкое распространение дисплеев в системах с ЭВМ обусловлено их высоким быстродействием, хорошей надежностью, бесшумностью работы, возможностью отображения информации в цвете и в различных формах (буквенно-цифровой, графической, картинной ), а также рядом других эксплуатационных удобств. Снабженные специальной клавиатурой дисплеи являются удобным средством взаимодействия судоводителя с навигационной ЭВМ и с аппаратурой НАК при решении задач судовождения. Во вспомогательных средствах отображения навигационной информации на малых экранах (в цифровых табло, буквенно-цифровых формулярах, светопланах) все более широкое применение находят дискретные устройства представления данных. Экраны этих устройств представляют собой матрицы из отдельных элементов, способных излучать свет или менять свою прозрачность в зависимости от величины приложенного напряжения. Управляя каждым элементом экрана, можно получить на нем требуемое изображение. 2. Автоматизация судов Автоматизация судов — это процесс, при котором функции управления судном и его оборудованием, ранее выполнявшиеся человеком, передаются приборам и техническим устройствам. Управление каким-либо процессом заключается в целенаправленном воздействии на этот процесс с тем, чтобы обеспечить его протекание в соответствии с заданными характеристиками. Если управление происходит без участия человека, то оно называется автоматическим, а система управления – автоматической. В следствие этого, возрастает необходимость в применении математических методов и специальных технических средств для повышения точности и надежности работы судовых систем контроля и регулирования, освобождения судоводителя от непосредственного выполнения некоторых стандартных операций по управлению судном, что создает условия для своевременного принятия им оперативных решений [1].Усложнились условия плавания, возрос поток информации, которую судоводитель должен осмыслить и на ее основе быстро принять решение. Обозначим интенсивность обращений вахтенного помощника к интерфейсу мостиковой системы, с положительным эффектом:  (1) (1)Предложим успешное обращение, как положительный сценарий вахты, к информационной системе, в виде: Оценка сценария производится индикатором количества отклонений: где: Fmin - минимальное количество обращений. Чрезмерная напряженность работы судоводителя дает предпосылки для возникновения аварийных случаев. Внедрение информационных технологий позволило освободить судоводителя от выполнения однообразных рутинных действий, снабдило его необходимой информацией в удобной и наглядной форме. Необходима минимизация усилий в оптимизации показателя нахождения опасных секторов и объектов в информационной среде:  (4) (4)Контекст пользователя Е-навигации Ux, включает выборочно, перечень приоритетных объектов в общем сценарии пользователя и действий которым следует судоводитель: Где:  ; время t`x,n, ∆t`x,n и t`I,j,k,l, ∆t`i,j,k,l , игнорирует событие. ; время t`x,n, ∆t`x,n и t`I,j,k,l, ∆t`i,j,k,l , игнорирует событие.Функции  (6) (6)Где: Kp,K - курсы исполняемый и заданный; ∆Kx- навигационная поправка к курсу судна отклонения от траектории;  - угловая скорость и отклонение от траектории; - угловая скорость и отклонение от траектории;apr, ain, ad, bpr, bin -коэффициенты. На современных морских судах от отдельных устройств и простых систем автоматизации перешли к использованию интегрированных систем, в комплексе решающих задачи управления судовыми техническими средствами. Одной из таких судовых систем является электронный комплекс для решения задач: навигации, предупреждения столкновений, управления движением, обеспечения безопасности, радиосвязи, контроля технических средств и ряда других. Такие электронные комплексы - это интегрированные системы ходового мостика (Integrated bridge system, IBS). Появились прототипы интегральных систем. Процесс управления судном осуществляется либо непосредственно человекомоператором, либо судоводителем вместе о техническим средствами. При этом приходится решать проблему распределения функций между судоводителем и техническими средствами. Текущие алгоритмы оперативного управления морской эргатической системой, выстраиваются в сочетании локального описания объектов и их взаимодействия с окружающей средой, как уравнение состояния переходов: Где: X[k+1], X[k] - векторы состояния судна и среды в дискретные моменты времени; Ф ( X, U, F, t) - функция перехода, учитывающая изменение состояния; U [k]- вектор управляющих воздействий; F [k]- вектор возмущающих воздействий среды; Г(t)U[k], G(t)F[k] - векторные интегральные преобразования управляющих и возмущающих воздействий. Интегрированная система ходового мостика рамочно, образует эргатическую (человеко-машинную) систему управления движением судна и обеспечения его безопасности. Навигационно-судовую информацию для оператора НУИК, морской эргатической системы, количественно оцениваем по уровню энтропии:  (8) (8)Где: N- количество возможных состояний; Pi- вероятность. Из вероятностной дистанции сближения судов можно определить энтропию:  (9) (9)Где: V, C, D -скорость, курс, дистанция. Находим распределение с большим количеством n независимых измерений случайной величины, при интервале [a,b], и малых субинтервалов m : (10/11) Любая целенаправленная система, управляемая; с этой стороны она состоит, по крайней мере, из двух основных звеньев: управляющего и управляемого [3]. От управляющего звена к управляемую передается виде определённых сигналов управляющие информации, вызывающие те или иные изменения в состоянии управляемого звена. Управляющая информация формируется на основе переработки всей информации, поступающие в управляющая звено. Если управляющая звено техническое устройство, то говорят об автоматической системе, если же качестве управляющего звена выступает человек – об эргатической, автоматизированной, человеко-машинной. Система создает не столько базу данных, необходимо для контроля состояния навигационного процесса, сколько некоторое пространство знаний, которые является исходным для управленческой деятельности судоводителя. Именно в таких системах эргатических, допустимо рассмотреть практически все формы взаимодействия объектов с друг другом [4,5]. Основное – это минимизация риска столкновения судов и морских объектов, как ошибки вахтенных, при вероятности расхождения, как события противоположного: Где: P(A),P(B)- ошибки работы вахты на мостике судна. В этом случае рассматриваем взаимодействие на информационном и силовом уровнях принятия решения судоводителем. Не своевременное обнаружении технического или информационного сбоя в датчиках навигационной информации, влечёт за собой появление навигационного риска, способного привести к тяжелым последствиям. Поэтому планирование поддержания безопасности навигации на необходимом уровне должно быть связано не только с ними с минимизации внешних рисков, улучшением степени точности навигационных приборов, но и уменьшением влияния человеческого фактора, для минимизации рисков в навигации. Человеческий элемент является центральной компонентой, поскольку каждая личность обладает своими способностями и имеет ограничения, будь они физические, психосоциальные, физиологические или психологические. При этом нужно учитывать, что поведение человека, особенно в критической ситуации, определяется не только и не столько общими психофизиологическими закономерностями, но и теми индивидуально-психологическими особенностями, которые присущи данной личности. Как вариация для управления сложными ситуациями в мостиковой системе могут быть применимы блоки управления на основе мультиагентных систем. Примем вектор измеримых переменных состояния объекта и среды: Y[k]=CX[k]+V[k] Где: V[k]-вектор помех измрений; C- матрица связи измеримых переменных с переменными состояниями. Функциональное взаимодействие выражается, как связи в самой системе:  (13) (13)Способность управлять означает наличие у оператора-судоводителя достаточных средств для выработки решений и проведения их в жизнь. В теории управления принятия решений рассматривается, как циклический процесс, каждый цикл которого включает реализацию определяющих функций. В настоящее время, судоводитель в эргатической системе управления мостиком получает данные с различных датчиков, для принятии правильных решений при различных обстоятельствах плавания. Успешное применение вычислительных комплексов, получение с их помощью более продуктивных результатов повышают самооценку человека, его уверенность в способности решать сложные профессиональные задачи. Из позитивного отношения к различным сторонам работы с компьютером складывается удовлетворенность пользователя как на когнитивном, так и на эмоциональном уровне. Все это приводит к формированию у некоторых пользователей позитивных личностных черт, таких, как деловая направленность, точность, аккуратность, уверенность в себе, которые переносятся и в другие области жизнедеятельности. К негативным личностным преобразованиям относится снижение интеллектуальных способностей человека при упрощении решения задач с помощью компьютера, редуцировании их смысловой стороны, сведении процессов решения к формально-логическим компонентам. Интегрированная система состоит из нескольких частей, с целью объединения для выполнение новой задачи, для решения которой требуется использовать функции объединяемых частей. При построении современных интегрированных мостиковых комплексов применяется системный подход. Основной общий принцип этого подхода заключается в рассмотрении частей системы с учётом их взаимодействия. Системный подход включает в себя выявление структуры системы, типизацию связей, определение атрибутов, анализ влияния внешней среды. Применительно к процессу судовождения системный подход состоит в учете всех особенностей этого процесса, всех существенных связей между различными частями системы вождения судна, между ней и внешней средой, между системой и оператором с целью достижения максимальной эффективности в решении задач судовождения. Эффективность интегрированной системы определяется не только качеством разработки и реализации каждого ее уровня, но и оптимальностью их взаимодействия. Конфигурация ходового мостика - это совокупность из определенного числа частей, образующих интегрированную систему той или иной мощности. Под мощностью понимается характеристика объема решаемых системой задач. Минимальный комплект интегрированной системы, при котором она еще отвечает своим основным целям, является ее базовой конфигурацией. Интеграция систем является одним из основных механизмов повышения уровня автоматизации различного рода процессов. Самым важным требованием к интегрированным системам является обеспечение их открытости, должна быть возможность подключения к системе дополнительного оборудования и организации его работы в конфигурации мостика. Это требование определяет способность ИС к расширению функций, к модернизации, к дальнейшей автоматизации процессов в той или в другой предметной области. Открытость систем обеспечивается использованием единой дискретной основы построения аппаратуры, стандартизацией оборудования, применением магистрально-модульного и модульно-иерархического принципа формирования структуры и рядом других мер. Единая дискретная основа означает, что все отдельные части ИС должны управляться микропроцессорной техникой, преобразовывать данные и выдавать их в цифровой форме. Такое построение аппаратуры позволяет более просто и надежно организовывать информационное взаимодействие между частями системы, а также между системой и другим оборудованием. Когда все части имеют микропроцессорную основу, то для образования ИС они объединяются в сеть с помощью информационного канала и специального программного обеспечения и взаимодействуют в соответствии с определенным протоколом. Стандартизация оборудования направлена на обеспечение требуемых эксплуатационных, технических характеристик ИС и совместимости различного вида входящей в ИС аппаратуры, выпускаемой различными фирмами и организациями. Конструктивная совместимость предполагает согласованность конструктивных параметров частей ИС, позволяющая соединять функциональные устройства в единое конструктивное целое. Информационная совместимость определяется условиями для единообразной передачи сообщений между частями системы. Энергетическая совместимость состоит в обеспечении, по возможности, одинакового электропитания объединяемых частей. Касаясь интегрированных систем ходового мостика, необходимо отметить следующее. Минимальные эксплуатационные требования к морским навигационным приборам и системам определяются Международной морской организацией - ИМО (IMO – International Maritime Organization). Создание интегрированных систем базируется на международных стандартах, определяющих, как должны работать друг с другом компоненты этих систем. Во всех странах стандарты информационного взаимодействия является протоколом. Автоматизация производственных процессов на начальном этапе приводит к применению микропроцессоров (компьютеров) для управления отдельным оборудованием. При дальнейшей автоматизации появилась необходимость создания локальных объединений копьютеризованных устройств с целью централизации управления, совместного использования информационных ресурсов и для решения комплексных задач. Такое объединение по существу сводится к обеспечению информационного взаимодействия между компьютерами, управляющими отдельными устройствами. Интегрированная система ходового мостика относится к классу информационно-управляющих систем. ИСМ образуется путем установки связей между отдельными ее частями с применением специальных программ для обеспечения их совместной работы. Основными в функционировании ИСМ являются параметры, характеристики и содержание внешних и внутренних информационных взаимодействий. Это определяет и построение ИСМ как информационной сети, в которой взаимодействие между частями производится в соответствии со специальным протоколом. Основой практически всех систем, входящих в ИСМ, является вычислительная машина с визуализатором. На современном этапе применяют плоские жидкокристаллические (ЖК) мониторы (LCD - liquid crystal display) [3,5]. 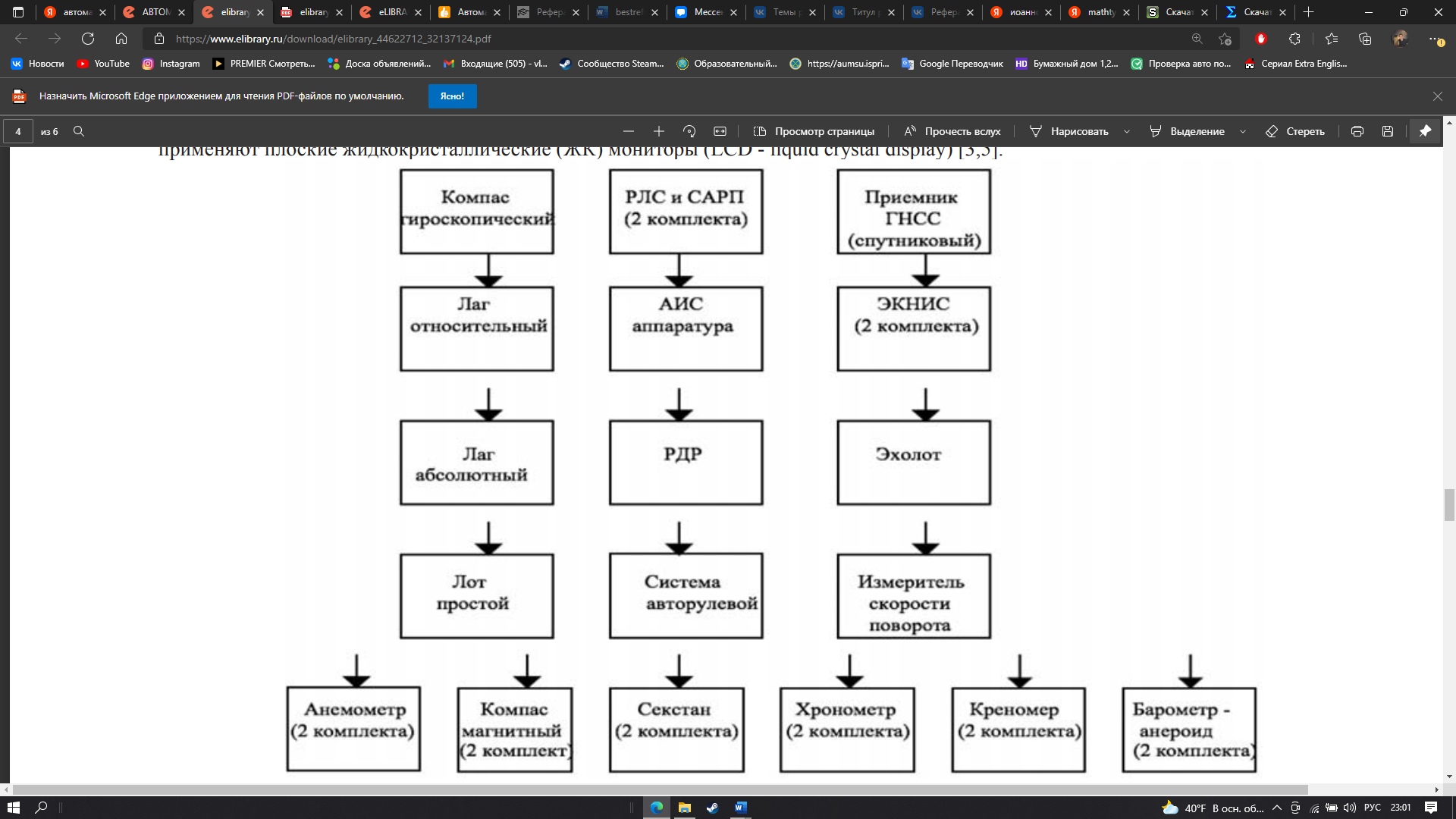 Рис. 1. Состав Интегрированной системы Интегрированная система ходового мостика является главной в интегрированной системе судна и исполняет роль управляющего центра. Интегрированная система ходового мостика относится к классу информационно-управляющих систем. Формирование управляющего воздействия в ИСМ производится через адаптивную систему. 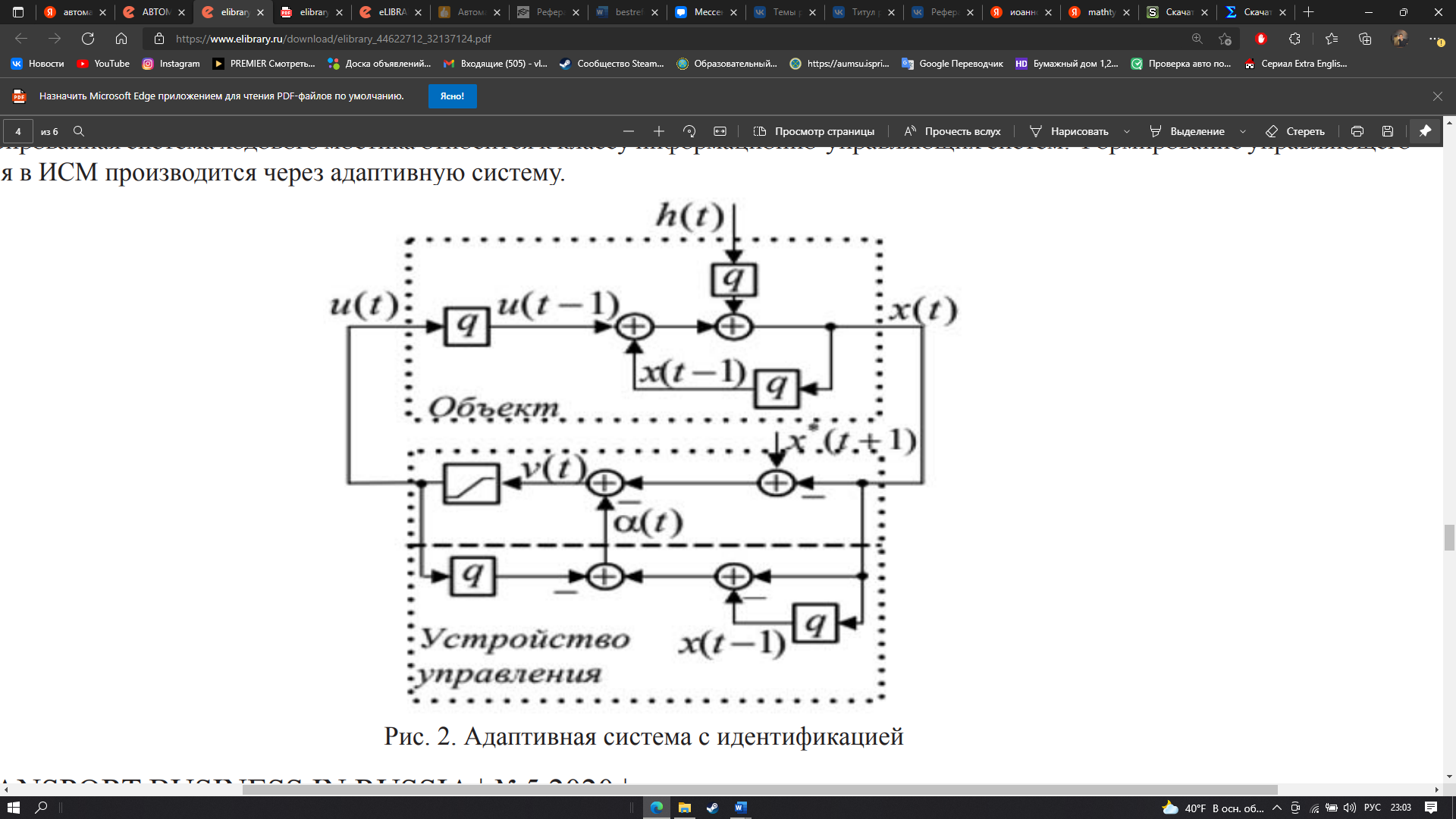 Рис. 2. Адаптивная система с идентификацией Достоинствами ИНС являются непрерывная динамичная выдача пользователю полного навигационного решения (координаты, скорость, ускорения, угловая ориентация), возможность выдачи информации с высокой частотой, независимость от внешних источников информации. Мостиковые системы дополняются инерциальными приборами навигации. В качестве чувствительных элементов применяются прецизионные гироскопы и акселерометры. Для повышения долговременной точности необходимо периодически корректировать данные ИНС по показаниям внешних приборов. Это стало предпосылкой разработки алгоритмов интегрированных навигационных систем [6]. Исходя из существующих и перспективных требований безопасности мореплавания, а именно обязательно несение ходовой вахты судоводителем, наиболее целесообразным следует применение Систем поддержки принятия решения для судоводителя, оценка рисков, далее интеграция ее в системы навигации [6].Внедрение искусственного интеллекта (в качестве системы для поддержки принятия решения судоводителем) с развитием навигационных систем, человек- оператор должен быть компетентен в современных видах навигации. Глава 2. Автоматизированная судовая навигационная подсистема. 2.0 Назначение и решаемые задачи. АСНП решает задачи, связанные с выбором пути, контролем за перемещением судна и прогнозированием его движения. Основной задачей АСНП является контроль за движением судна, состоящий в определении координат и параметров траектории по измерениям навигационных параметров. Основная задача АСНП подразделяется на задачу счисления пути судна, задачу обсерваций и задачу определения элементов сноса по ряду обсервованных мест. Задача счисления пути состоит в определении текущего места судна относительно известного начального положения, по измерениям элементов собственного движения, с учетом информации о возмущающих движение факторах: течении, ветре, погрешностях приборов. Задача обсервации заключается в нахождении координат места судна по одновременным либо практически одновременным измерениям параметров ориентиров, таких как пеленг, расстояние и т. д. При решении задач обсервации используется информация приемоиндикаторов различных радиотехнических навигационных систем и других устройств, с помощью которых измеряются параметры ориентиров. Задача определения элементов сноса по обсервациям состоит в уточнении координат места судна и составляющих его скорости по результатам разновременных обсерваций. Кроме названных задач АСНП решает и ряд вопросов связанных с определением поправок приборов, выбора пути судна, прогнозированием его движения, нахождением предполагаемого времени прихода в точки поворота и конечный пункт и т. д. Основным требованием к качеству решения задачи контроля за движением судна является обеспечение высокой точности и надежности получаемых результатов, где точность определяется величиной обычной для функционирования системы погрешностей, а надежность - вероятностью отсутствия в результатах аномальных погрешностей и сбоев. Структура АСНП может быть представлена следующей схемой:  1 2 |