ТАУУ. Курсовая. Курсова работа
 Скачать 1.68 Mb. Скачать 1.68 Mb.
|

|
Санкт-Петербургский политехнический университет Петра Великого Институт машиностроения, материалов и транспорта  КУРСОВА РАБОТА Дисциплина: «Теория автоматического управления Студент гр. 3331504/90302 Пащенко С. В. Преподаватель Терешин В. А. Санкт-Петербург 2022 ОГЛАВЛЕНИЕТЕХНИЧЕСКОЕ ЗАДАНИЕ 2 ВВЕДЕНИЕ 5 1.МАТЕМАТИЧЕСКАЯ МОДЕЛЬ СИСТЕМЫ УПРАВЛЕНИЯ 6 1.1.Уравнения движения механической части 6 1.2.Характеристики двигателя 8 1.3 Передаточная функция цепи обратной связи 8 1.4 Операторная форма системы уравнений 10 1.5 Матричная форма системы уравнений движения в изображениях по Лапласу 10 1.6. Структурная схема системы управления 11 2.ОБЛАСТЬ УСТОЙЧИВОСТИ СИСТЕМЫ УПРАВЛЕНИЯ В ПРОСТРАНСТВЕ 12 2.1Характеристическое уравнение 12 2.2Критерии устойчивости Стодолы и Рауса-Гурвица 12 2.3Проверка устойчивости с помощью годографа Михайлова 15 3ИССЛЕДОВАНИЕ ПЕРЕХОДНЫХ ПРОЦЕССОВ 17 3.1Обратное преобразование Лапласа 17 3.2 Особенности переходных процессов в области устойчивости и на ее границе 18 3.3 Область допустимых значений крутящего момента на выходном валу передаточного механизма 20 3.5 Линии равных длительностей переходных процессов 21 4.1Линии равных уровней интегрального показателя качества при нулевом весовом множителе 23 4.2 Линии равных уровней интегрального показателя качества при бесконечно большом весовом множителе 25 4.3 Линии равных уровней интегрального показателя качества при бесконечно большом весовом множителе 26 4.4 Анализ переходных процессов на оптимальной кривой 27 4.5Описание наилучшего переходного процесса 30 ВЫВОД 31 ТЕХНИЧЕСКОЕ ЗАДАНИЕВыбрать параметры аналогового регулятора модуля робота промышленного робота. Углы поворота ротора двигателя  и выходного вала редуктора и выходного вала редуктора  измеряются и пропорциональные им сигналы измеряются и пропорциональные им сигналы  и и  подаются на блок сравнения с задающим напряжением подаются на блок сравнения с задающим напряжением  . . - коэффициент преобразования измерителя угла поворота; - коэффициент преобразования измерителя угла поворота;  - передаточное отношение редуктора; - передаточное отношение редуктора;  - требуемый закон перемещения модуля поворота. Сигнал рассогласования - требуемый закон перемещения модуля поворота. Сигнал рассогласования  поступает на ПИ – регулятор. Сформированный отрицательной обратной связью сигнал управления поступает на вход двигателя. Структурная схема ПРИМ представлена на рисунке 1. поступает на ПИ – регулятор. Сформированный отрицательной обратной связью сигнал управления поступает на вход двигателя. Структурная схема ПРИМ представлена на рисунке 1.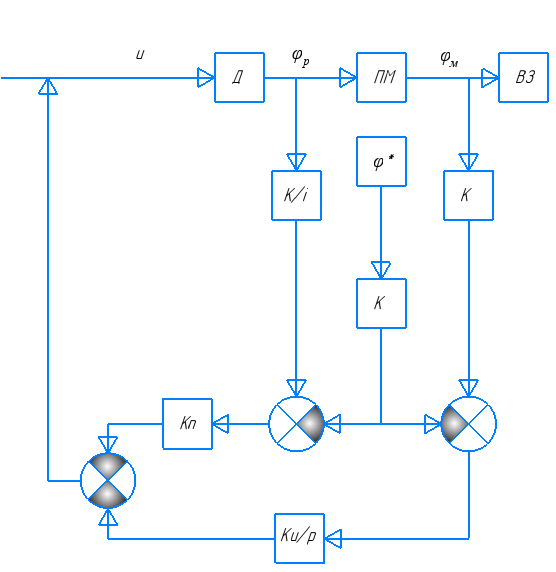 Рисунок 1 – Структурная схема ПРИМ Момент инерции приводимого в движение выходного звена  . Жесткость и коэффициент демпфирования редуктора, приведенные к выходному валу . Жесткость и коэффициент демпфирования редуктора, приведенные к выходному валу  . Момент инерции ротора двигателя . Момент инерции ротора двигателя  . При расчетах необходимо использовать линейную динамическую характеристику двигателя . При расчетах необходимо использовать линейную динамическую характеристику двигателя Крутизна механической характеристики и собственная постоянная времени двигателя  . Коэффициент . Коэффициент  . .  – движущий момент. – движущий момент.Записать уравнения движения механической части, как системы с двумя степенями свободы, приведенную динамическую характеристику двигателя и уравнение системы управления. Разрешить полученную систему четырех уравнений в переменных Лапласа относительно четырех неизвестных. Сформировать знаменатель передаточных функций. Определить область устойчивости замкнутой системы управления с помощью критерия Стодолы и Рауса-Гурвица. На диаграмме при  построить области крутящего момента построить области крутящего момента  , в которой , в которой  , и управляющего сигнала , и управляющего сигнала  , в которой , в которой  . В области . В области  одновременного выполнения этих двух условий построить линии равных длительностей одновременного выполнения этих двух условий построить линии равных длительностей  переходных процессов при нулевых начальных условиях. Под длительностью переходного процесса будем понимать время, после которого угловая ошибка не превысит 2% от . Построить оптимальную кривую переходных процессов при нулевых начальных условиях. Под длительностью переходного процесса будем понимать время, после которого угловая ошибка не превысит 2% от . Построить оптимальную кривую Найти значения параметров  и и  из области , соответствующие наименьшей длительности переходных процессов. Проиллюстрировать результаты расчетов при трех различных значениях из области , соответствующие наименьшей длительности переходных процессов. Проиллюстрировать результаты расчетов при трех различных значениях  , построив графики действительного перемещения , упругой деформации редуктора , построив графики действительного перемещения , упругой деформации редуктора  , крутящего момента на выходе редуктора , крутящего момента на выходе редуктора  , движущего момента, приведенного к выходу редуктора , движущего момента, приведенного к выходу редуктора  и сигнала управления и сигнала управления  как функций времени. как функций времени.ВВЕДЕНИЕВ курсовой работе требуется рассчитать параметры обратной связи модуля поворота промышленного робота. Параметры обратной связи должны соответствовать следующим требованиям: - Поворот модуля должен быть равным  - Управляющий сигнал  - Момент на выходном валу двигателя  Для того, чтобы найти подходящие параметры, нужно построить область устойчивости. Область устойчивости определяется с помощью критериев Стодолы и Рауса-Гурвица. В отдельных точках используется критерий Михайлова для проверки устойчивости. На области устойчивости ищем область, в которой крутящий момент на выходном валу и управляющий сигнал соответствуют требованиям. На области, которая соответствует всем требованиям, строятся линии равной длительности переходных процессов. Также на этой области ищутся точки с максимальной и минимальной длительностями переходных процессов. Далее нужно построить оптимальную кривую, которая строится по 3 точкам, в которых функционалы качества достигают минимума. 3 точки, т.к. 3 функционала качества: при весовом множителе равном нулю, бесконечности и десяти. Далее для точек на оптимальной кривой строятся графики перемещения механизма , упругой деформации редуктора  , крутящего момента на выходном валу редуктора и приведенного к выходу редуктора , крутящего момента на выходном валу редуктора и приведенного к выходу редуктора  , также сигнала управления u как функций от времени. , также сигнала управления u как функций от времени.МАТЕМАТИЧЕСКАЯ МОДЕЛЬ СИСТЕМЫ УПРАВЛЕНИЯУравнения движения механической частиМеханическая часть модуля поворота состоит из: - ротора электродвигателя; - редуктора; - выходного звена. Кинематическая схема механизма представлена на рисунке 1.1.1. 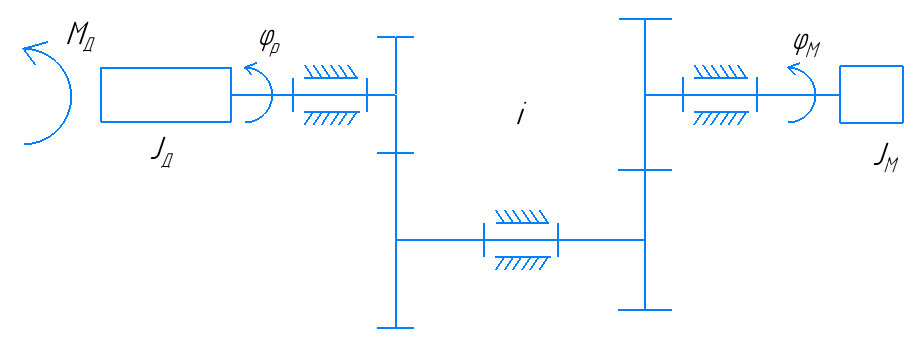 Рисунок 1.1.1 – Кинематическая схема механизма Приведем схему к ценному виду (рисунок 1.1.2). 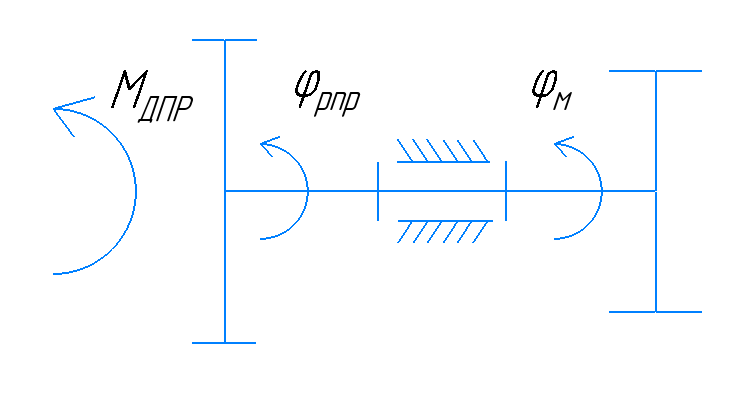 Рисунок 1.1.2 – Кинематическая схема ценного вида Для жесткой системы   где i=10 – передаточное отношение редуктора. Запишем формулу кинетической энергии для схемы:  где  . .Mдпр – обобщенная сила, порожденная Mд и приведенная к φM.    Учтем упругость редуктора. Схема с учетом упругости редуктора представлена на рисунке 1.1.3. 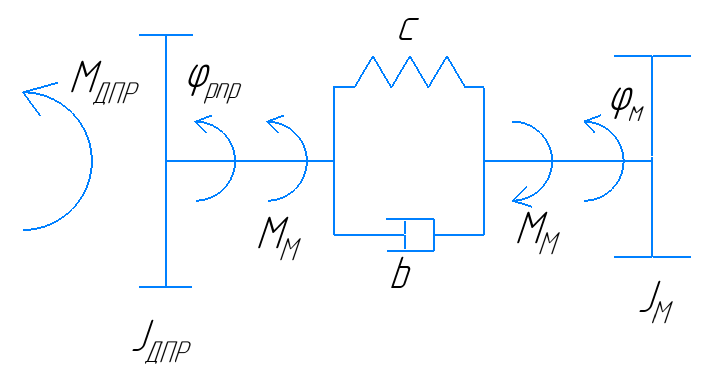 Рисунок 1.1.3 – Динамическая модель механической части На рисунке 1.1.3 c – жесткость, b – коэффициент демпфирования. Напишем уравнения для динамической модели:    где  – приведенный момент инерции двигателя, – приведенный момент на двигателе, – приведенный момент инерции двигателя, – приведенный момент на двигателе,  – приведенный угол поворота ротора двигателя, – угол поворота механизма, – момент инерции механизма. – приведенный угол поворота ротора двигателя, – угол поворота механизма, – момент инерции механизма.Характеристики двигателяБудем предполагать, что у нас электродвигатель постоянного тока:  Напишем уравнение для мощности:  Для расчета установившихся и медленных переходов режимов применяется статическая характеристика двигателя. Составим уравнение статической характеристики двигателя:  где s – крутизна механической характеристики, s = 0,05 Нмс.  тогда  При расчете переходных процессов может быть существенным запаздывание Mд(t) относительно u(t), тогда уравнение механической характеристики двигателя примет вид:   – собственная постоянная времени двигателя, – коэффициент. – собственная постоянная времени двигателя, – коэффициент. Приведем динамическую характеристику двигателя к φм, умножив левую и правую части уравнения на i:    1.3 Передаточная функция цепи обратной связиНиже на рисунке приведена структурная схема механизма с обратными связями. Рисунок 1.3.1 – Структурная схема механизма с обратной связью Для структурной схемы с дифференциальным и интегральным звеном механизма сформируем уравнение сигнала.     где  требуемый закон перемещения двигателя, – коэффициент преобразования измерителя угла поворота. Представим это уравнение в дифференциальной форме: требуемый закон перемещения двигателя, – коэффициент преобразования измерителя угла поворота. Представим это уравнение в дифференциальной форме:1.4 Операторная форма системы уравненийДополним систему уравнений механической части динамической характеристикой двигателя и уравнением сигнала управления и представим их в операторной форме:  где  – оператор дифференцирования. – оператор дифференцирования.1.5 Матричная форма системы уравнений движения в изображениях по ЛапласуСистему уравнений движения в изображениях по Лапласу  можно представить в матричной форме:  где:   1.6. Структурная схема системы управленияДля формирования структурной схемы удобно использовать систему уравнений в операторной форме:    Структурная схема системы управления показана на рисунке 1. 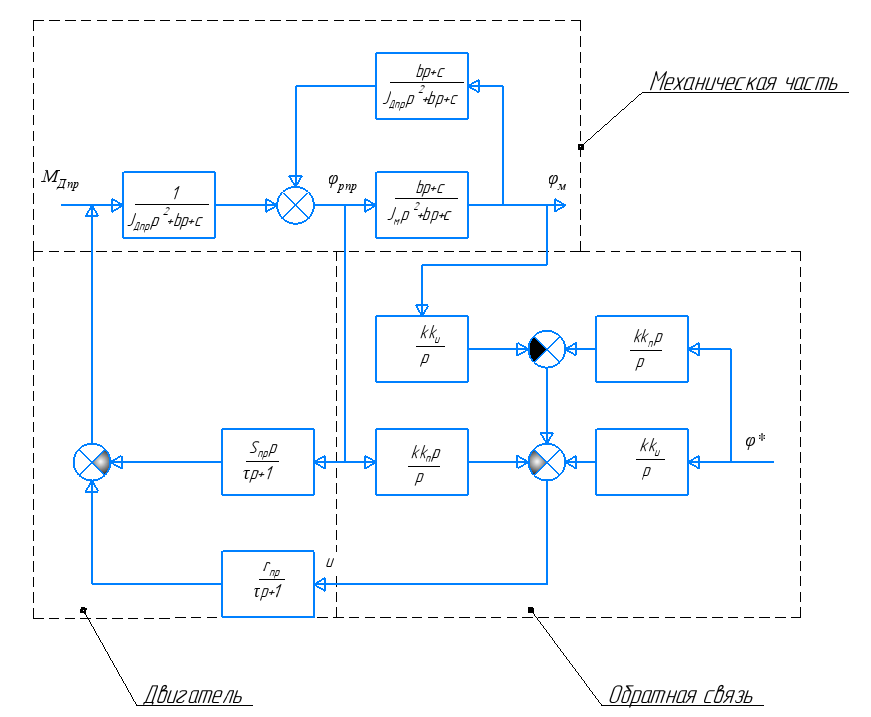 Рисунок 1.6.1 – Структурная схема системы управления ОБЛАСТЬ УСТОЙЧИВОСТИ СИСТЕМЫ УПРАВЛЕНИЯ В ПРОСТРАНСТВЕ | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||


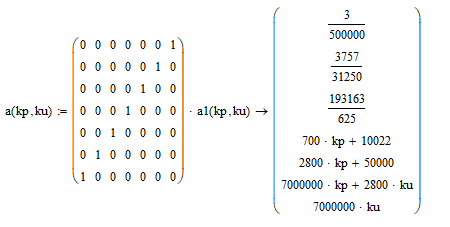
 – матрица коэффициентов системы уравнений модуля поворота. Для данной системы управления характеристическое уравнение выражается в виде:
– матрица коэффициентов системы уравнений модуля поворота. Для данной системы управления характеристическое уравнение выражается в виде:

 , является областью устойчивости. В области, где
, является областью устойчивости. В области, где  , система управления неустойчива. Область устойчивости системы управления представлена на рисунке 2.
, система управления неустойчива. Область устойчивости системы управления представлена на рисунке 2.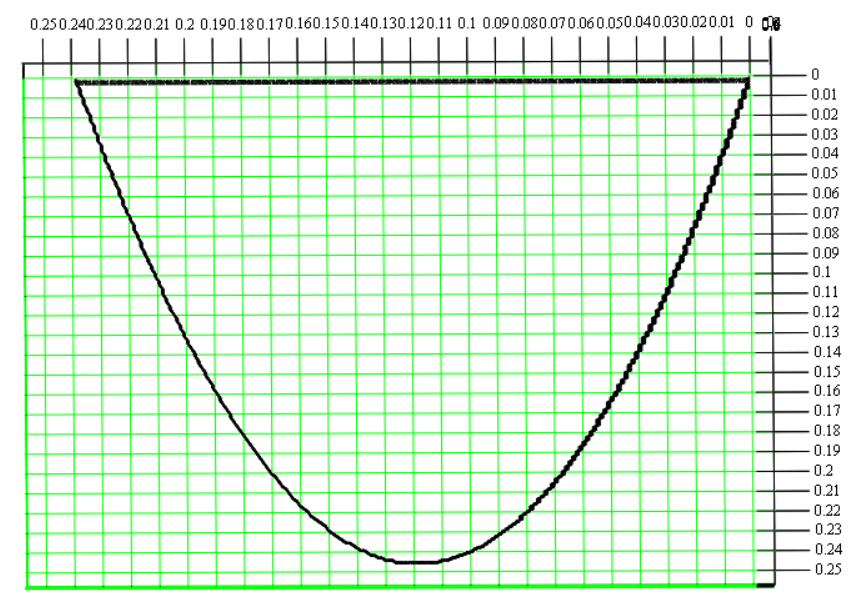
 ,
,  на
на  в характеристическом полиноме получается его комплексная частотная характеристика. Она представима в виде:
в характеристическом полиноме получается его комплексная частотная характеристика. Она представима в виде:


 , где
, где  – степень полинома.
– степень полинома.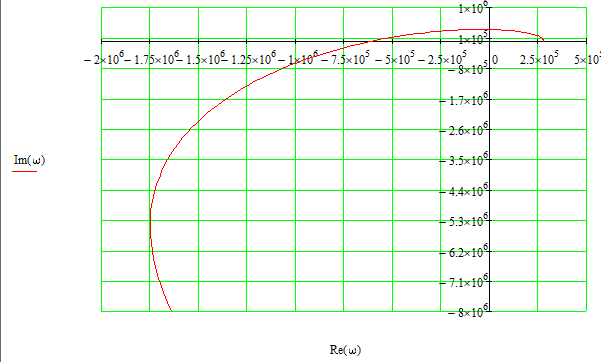
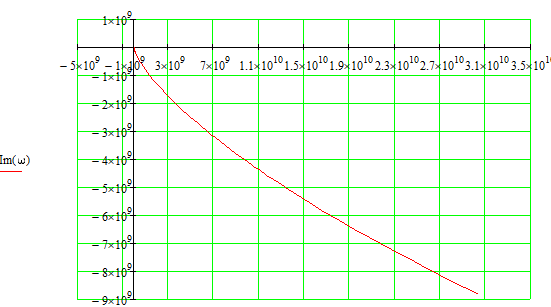
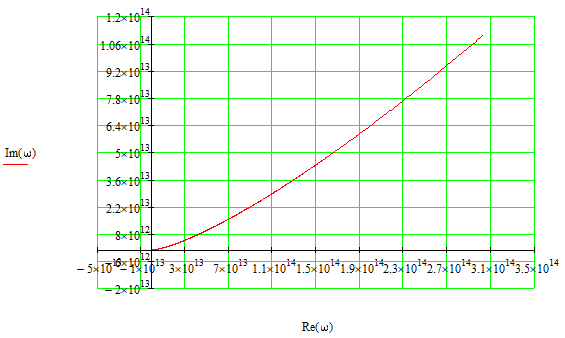

 , и так как
, и так как  , условие устойчивости выполняется.
, условие устойчивости выполняется. :
:
 ,
,  . Для данных параметров решаем систему уравнений движения:
. Для данных параметров решаем систему уравнений движения:

 ,
, 
 ,
, 

 ,
, 
 на выходном валу редуктора не должен превышать 150 Н∙м. Для его определения применим принцип освобождаемости от связей и заменим выходной вал редуктора крутящим моментом:
на выходном валу редуктора не должен превышать 150 Н∙м. Для его определения применим принцип освобождаемости от связей и заменим выходной вал редуктора крутящим моментом:
| № линии | tп, c | Координаты точек(kd,ku) | |||||||
| 1 | 12 | 0,01;0,022 | 0,06;0,154 | 0,12;0,2 | 0,16;0,17 | 0,2;0,07 | 0,14;0,045 | 0,08;0,025 | 0,032;0,01 |
| 2 | 8 | 0,01;0,016 | 0,06;0,14 | 0,12;0,18 | 0,16;0,15 | 0,18;0,12 | 0,15;0,07 | 0,09;0,04 | 0,023,0,01 |
| 3 | 6 | 0,01;0,01 | 0,04;0,09 | 0,08;0,15 | 0,12;0,17 | 0,16;0,13 | 0,16;0,1 | 0,1;0,06 | 0,05;0,03 |
| 4 | 3 | 0,02;0,02 | 0,035;0,055 | 0,05;0,08 | 0,08;0,11 | 0,08;0,08 | 0,06;0,065 | 0,04;0,04 | 0,015;0,015 |
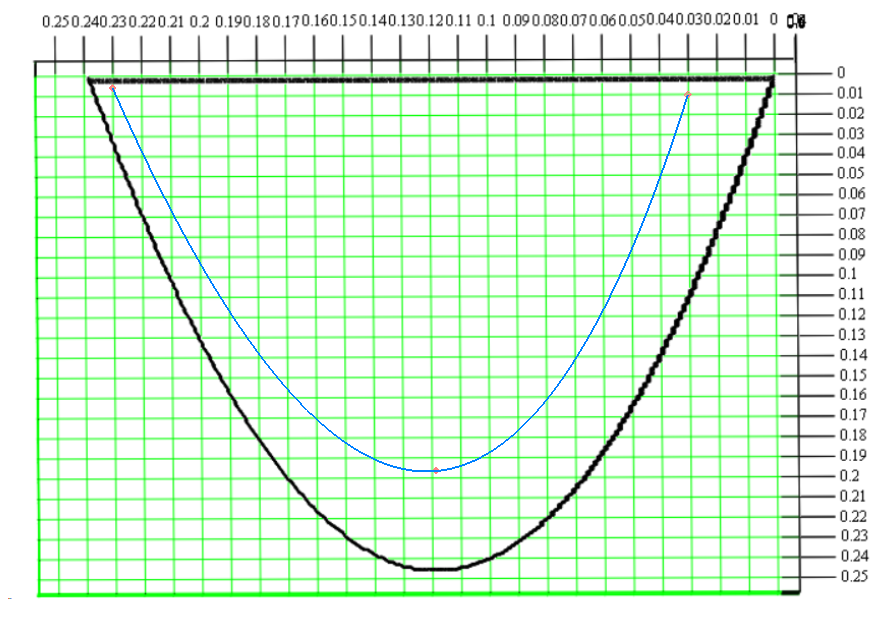
График с линиями равных длительностей приведены на рисунке ниже.
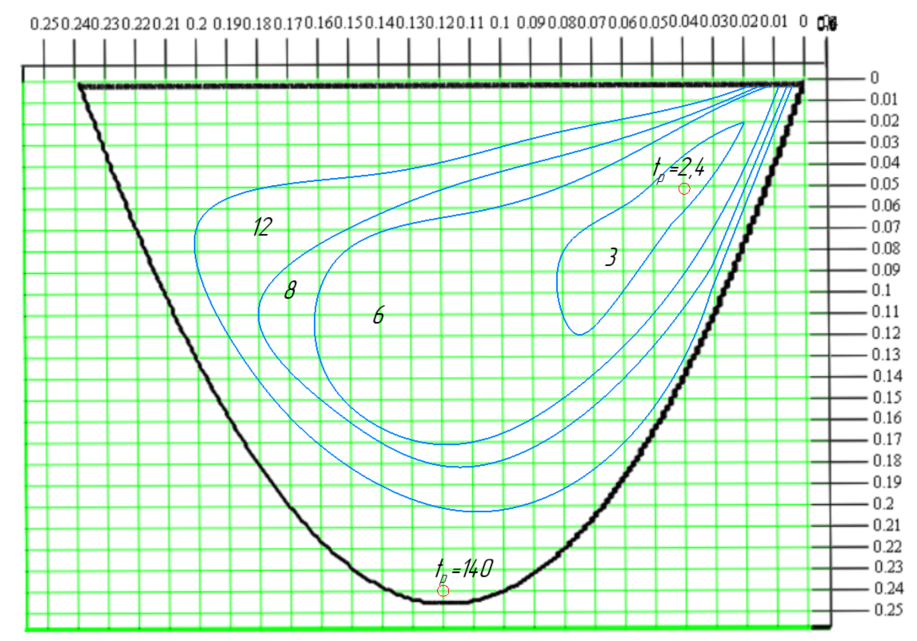
Рисунок 3.5.1 – График с линиями равных длительностей
Максимальное время переходного процесса составляет 140 с при Кп=0,12, Ки=0,24. Минимальное время переходного процесса составляет 2,4 с при Кп=0,04, Ки=0,052.
4 ОПТИМАЛЬНОЕ УПРАВЛЕНИЕ
При проектировании системы управления нужно уменьшать управляющие сигналы u и динамические ошибки
 . Эти взаимоисключающие требования свести к единому функционалу качества, представленному формулой 4.1.
. Эти взаимоисключающие требования свести к единому функционалу качества, представленному формулой 4.1.
где
 – весовой множитель.
– весовой множитель. В пространстве (kп, kи) надо найти min J(kп, kи), который определит (kп opt, kи opt). Необходимо найти оптимальную точку в области выполнения трех условий. Так как оптимальная точка (kп opt, kи opt) зависит от
, то надо построить оптимальную кривую при  по нескольким значениям . Эта задача оптимального управления может быть решена с помощью уравнения Лурье. Однако, из-за ее громоздкости воспользуемся перебором точек.
по нескольким значениям . Эта задача оптимального управления может быть решена с помощью уравнения Лурье. Однако, из-за ее громоздкости воспользуемся перебором точек.Линии равных уровней интегрального показателя качества при нулевом весовом множителе
При
 для расчета интеграла (4.1) можно ограничиться временем
для расчета интеграла (4.1) можно ограничиться временем  . Однако для большей точности, был взят интеграл бесконечности. Уравнение представлено формулой 4.1.1.
. Однако для большей точности, был взят интеграл бесконечности. Уравнение представлено формулой 4.1.1.
Найдем
 :
:
Наименьшее значение функционала соответствует точкам kп=0,06, kи=0,12 ,
 .
.Далее с помощью перебора точек построим три линии уровня. Линии уровня представлены на рисунке 4.1.1.
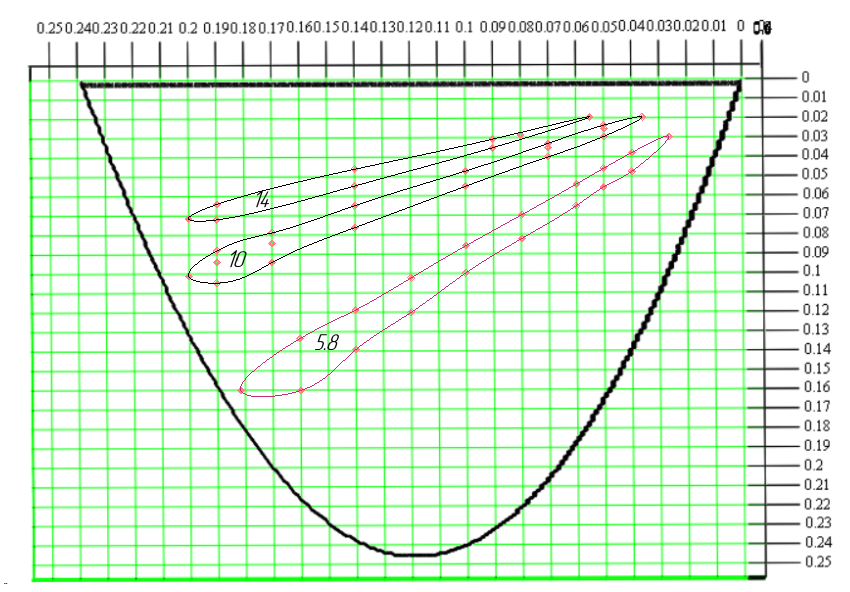
Рисунок 4.1.1 – Линии уровня с одинаковым функционалом
В таблице 4.1.1 приведены координаты точек этих областей.
Таблица 4.1.1 – Координаты точек
| № линии | J1 | Координаты точек(kп,ku) | |||||||
| 1 | 14 | 0,055;0,02 | 0,09;0,35 | 0,14;0,055 | 0,19;0,072 | 0,2;0,071 | 0,19;0,064 | 0,14;0,047 | 0,09;0,029 |
| 2 | 10 | 0,036;0,02 | 0,07;0,04 | 0.1;0.56 | 0,17;0,095 | 0,2;0,11 | 0,19;0,088 | 0,14;0,047 | 0,09;0,031 |
| 3 | 5.8 | 0,027;0,03 | 0,05;0,056 | 0,1;0,1 | 0,14;0,139 | 0,182;0,16 | 0,16;0,133 | 0,1;0,087 | 0,06;0,054 |
Линии равных уровней интегрального показателя качества при бесконечно большом весовом множителе
При
можно опустить второе слагаемое. Общий вид уравнения
Найдем
 :
:
Наименьшее значение функционала наблюдается в точке
 ,
,  и составляет
и составляет  .014
.014График линий уровней интегрального показателя качества при бесконечно большом весовом множителе показан на рисунке 4.2.1.
Рисунок 4.1.1 – Линии уровня с одинаковым функционалом
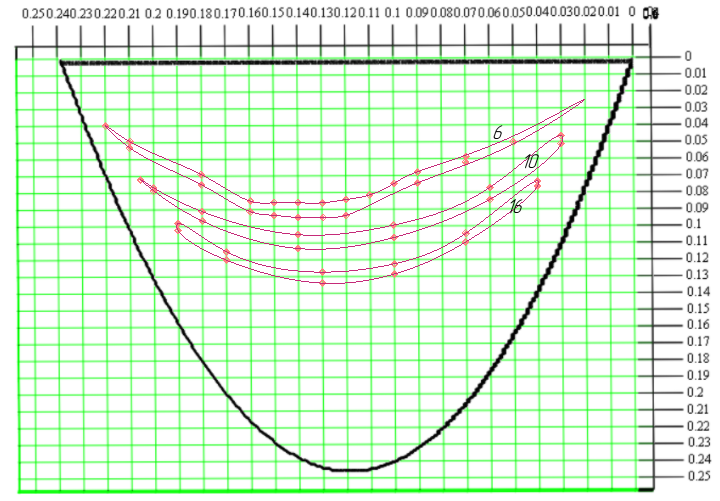
В таблице 4.2.1 приведены координаты точек этих областей.
Таблица 4.2.1 – Координаты точек
| № линии | J2 | Координаты точек(kd,ku) | |||||||
| 1 | 6 | 0,02;0,025 | 0,07;0,059 | 0,13;0,087 | 0,18;0,069 | 0,22;0,04 | 0,18;0,075 | 0,13;0,085 | 0,09;0,074 |
| 2 | 10 | 0,03;0,048 | 0,1;0,1 | 0.14;0.15 | 0,18;0,091 | 0,206;0,072 | 0,18;0,095 | 0,14;0,113 | 0,06;0,085 |
| 3 | 16 | 0,04;0,075 | 0,1;0,122 | 0,13;0,128 | 0,11;0,115 | 0,19;0,1 | 0,17;0,12 | 0,12;0,133 | 0,07;0,011 |
Линии равных уровней интегрального показателя качества при бесконечно большом весовом множителе
Найдем
 :
:
Наименьшее значение функционала наблюдается в точке
 ,
,  и составляет
и составляет  .
.График линий уровней интегрального показателя качества при бесконечно большом весовом множителе показан на рисунке 4.2.1.
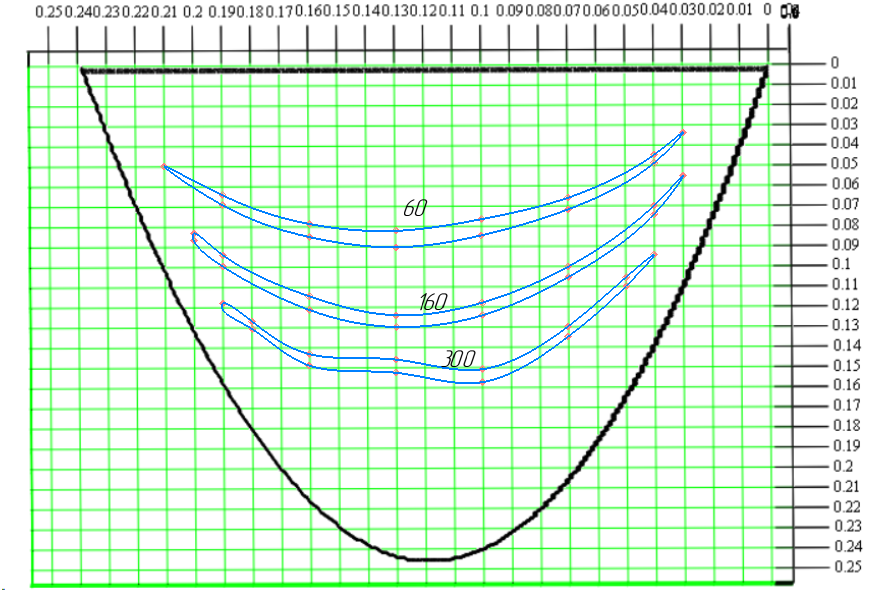
Рисунок 4.3.1 – Линии уровня с одинаковым функционалом
В таблице 4.3.1 приведены координаты точек этих областей.
Таблица 4.3.1 – Координаты точек
| № линии | J3 | Координаты точек(kd,ku) | |||||||
| 1 | 60 | 0,03;0,033 | 0,07;0,071 | 0,13;0,09 | 0,19;0,069 | 0,21;0,05 | 0,16;0,079 | 0,13;0,082 | 0,07;0,067 |
| 2 | 165 | 0,07;0,106 | 0,13;0,13 | 0.19;0.1 | 0,2;0,085 | 0,16;0,115 | 0,13;0,124 | 0,07;0,1 | 0,04;0,07 |
| 3 | 300 | 0,04;0,095 | 0,07;0,135 | 0,1;0,158 | 0,16;0,149 | 0,19;0,118 | 0,16;0,143 | 0,1;0,151 | 0,07;0,013 |
Анализ переходных процессов на оптимальной кривой
Построим оптимальную кривую через 3 точки, где все три функционала(J1, J2, J3) минимальны.
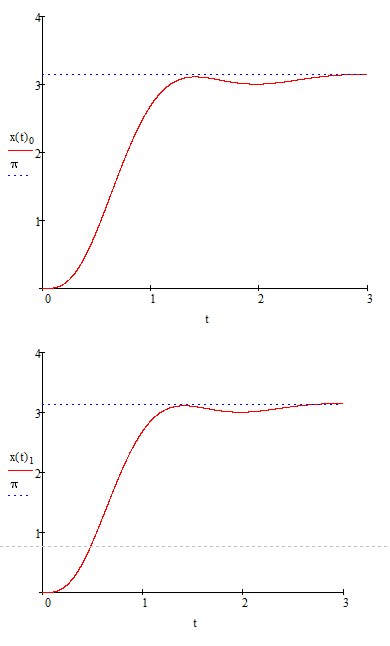
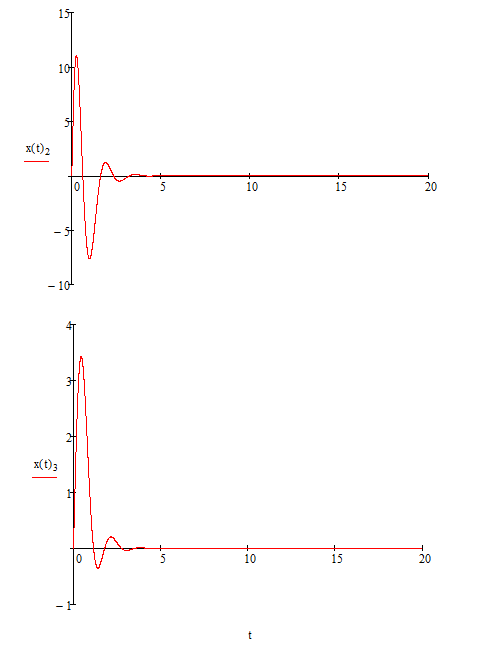
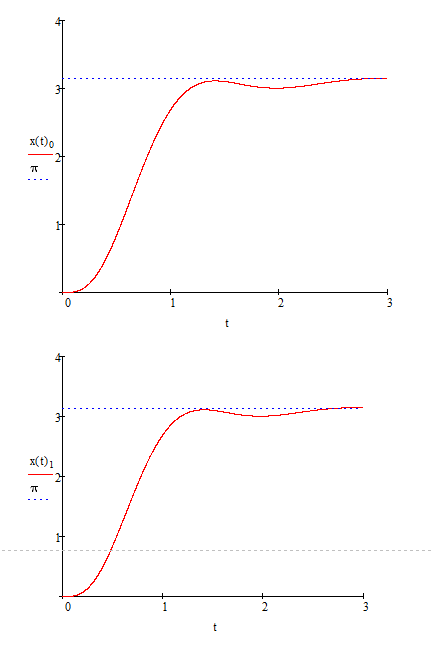
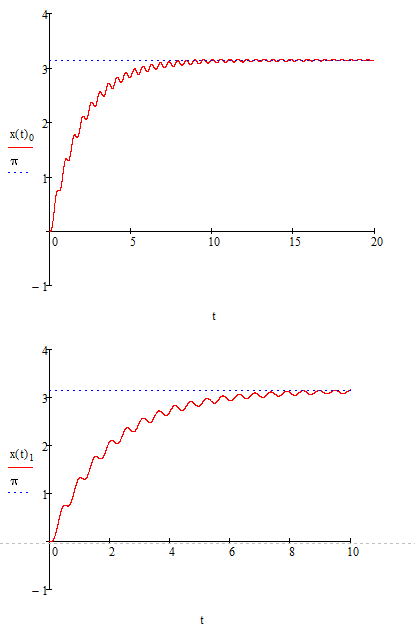
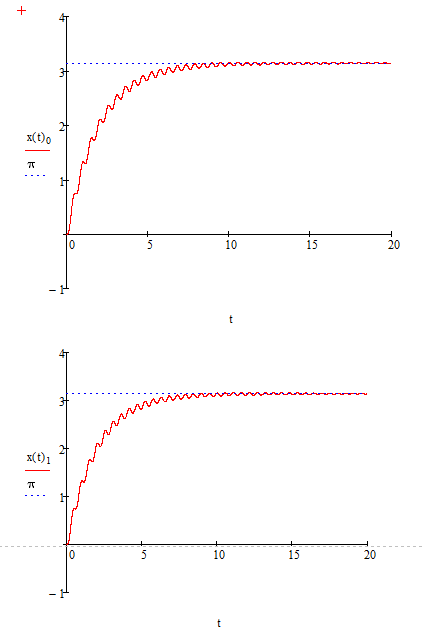
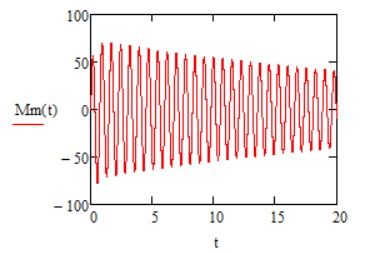
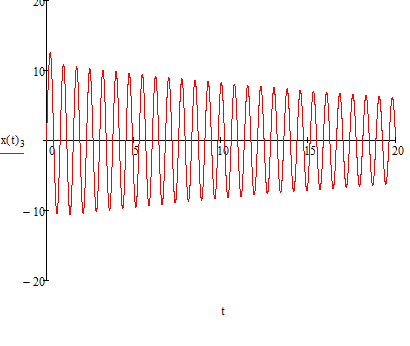
Минимумы функционалов достигаются при коэффициентах kп=0,03, kи=0,01. Графики переходного процесса для значений параметров kп=0,03, kи=0,01 представлены на рисунках 4.4.1-4.4.4 (где
 ,
,  ,
,  ,
,  ).
).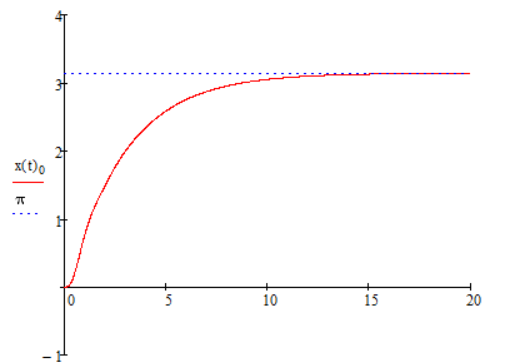
Рисунок 4.4.1 – График

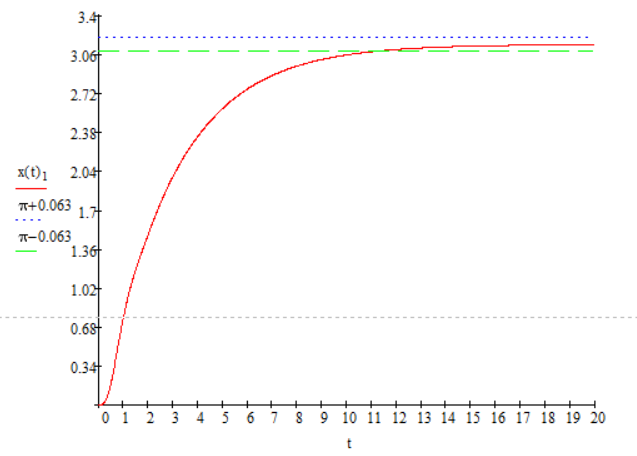
Рисунок 4.4.2 – График

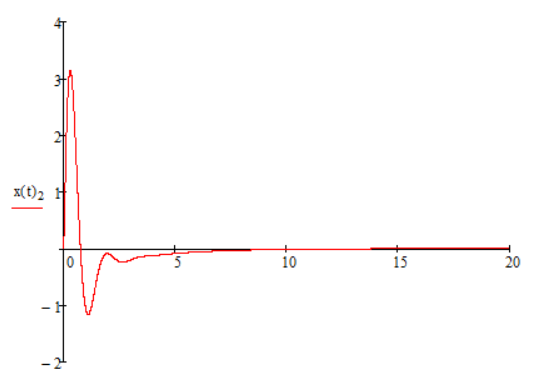
Рисунок 4.4.3 – График

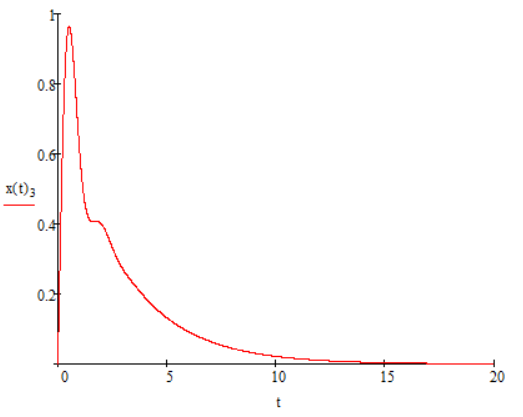
Рисунок 4.4.4 – График

Описание наилучшего переходного процесса
С учетом принятых ограничений: устойчивость,
 , и нежелательности превышения ошибки
, и нежелательности превышения ошибки  получена оптимальная точка в пространстве коэффициентов обратной связи
получена оптимальная точка в пространстве коэффициентов обратной связи  . И эти коэффициенты равны: , . Графики с этими коэффициентами представлены в разделе 4.4.
. И эти коэффициенты равны: , . Графики с этими коэффициентами представлены в разделе 4.4.Из графиков видно, что значения движущего момента, приведенного к выходу редуктора
, момента на выходном валу редуктора , а также упругой деформации редуктора и сигнала управления стремятся к нулю. ВЫВОД
В курсовой работе были вычислены параметры обратной связи
и для системы управления модулем поворота промышленного робота. Параметры обратной связи подобраны с учетом условий устойчивости, то есть уменьшения динамической ошибки , момента на выходном валу двигателя  , и значения управляющего сигнала
, и значения управляющего сигнала  , а также с учетом минимизации длительности переходного процесса и значения управляющего сигнала. В данной системе управления с течением времени значения динамической ошибки и управляющего сигнала , а также момента на выходном валу двигателя и механизма стремятся к нулю. Проделав данную работу, были подобраны такие коэффициенты, при которых робот прослужит дольше, т.к. не будет высоких колебаний, а также не будет затрачено большое количество электроэнергии.
, а также с учетом минимизации длительности переходного процесса и значения управляющего сигнала. В данной системе управления с течением времени значения динамической ошибки и управляющего сигнала , а также момента на выходном валу двигателя и механизма стремятся к нулю. Проделав данную работу, были подобраны такие коэффициенты, при которых робот прослужит дольше, т.к. не будет высоких колебаний, а также не будет затрачено большое количество электроэнергии.